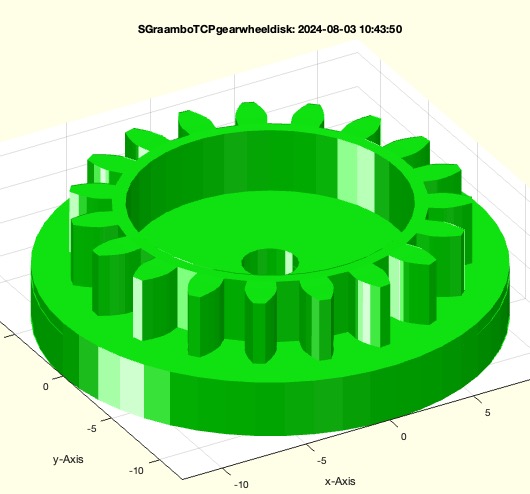
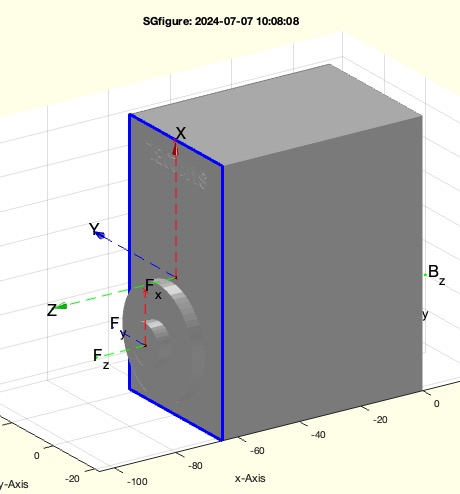
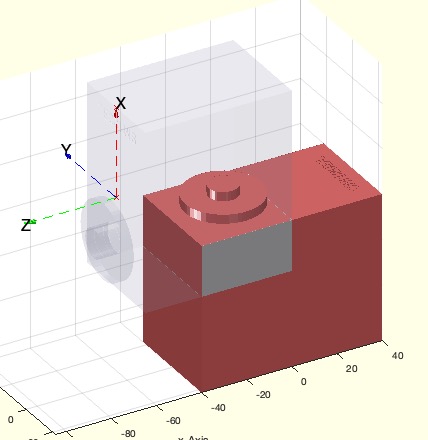
SGraamboTCPgearwheeldiskTL(DHM,"STL")- returns the gearwheeldisk of the Raambo robot as designed by Tim Lueth |
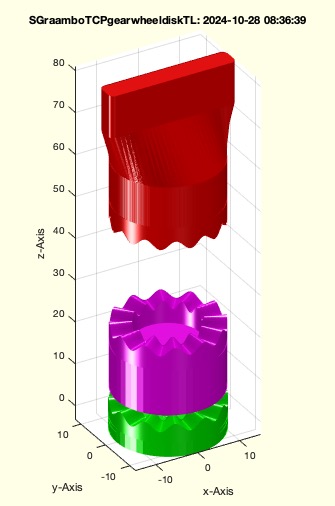 | % SGraamboTCPgearwheeldiskTL(DHM,"STL") - returns the gearwheeldisk of the Raambo robot as designed by Tim Lueth % (by Tim Lueth, VLFL-Lib, 2024-OKT-24 as class: PARAMETRIC DESIGN) % % Instead of a gear wheel this is a axial torque limiting magnet holded % clutch (Status of: 2024-10-24) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPknurledgearcover, SGraamboTCPgearwheeldisk % % [SGP,SGScr,SG2]=SGraamboTCPgearwheeldiskTL([DHM,"STL"]) % === INPUT PARAMETERS === % DHM: [Magnet-Diameter Magnet Height]; default is [15 4] % "STL": if used an STL folder is written in the desktopdir % === OUTPUT RESULTS ====== % SGP: SG of gear wheel disk for the FeeTech 60 motor % SGScr: SG, height 15mm, comparable to the height of % SGraamboTCPMagnetM22TL or SGraamboTCPMagnetM22 % SG2: Too,l height 15mm, to move the wheel inside a 15mm knureld % gearwheel ring % % Additional Hyperlinks: % D15x4 Magnet % % EXAMPLE: % SGraamboTCPgearwheeldiskTL('stl') % % See also: SGraamboTCPknurledgearcover, SGraamboTCPgearwheeldisk % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPknurledgearcoverTL(LK,"STL")- returns a torque limited knurled tube TCP cover for Raambo |
 | % SGraamboTCPknurledgearcoverTL(LK,"STL") - returns a torque limited knurled tube TCP cover for Raambo % (by Tim Lueth, VLFL-Lib, 2024-OKT-24 as class: AUTOMATIC DESIGN) % % based on the TCP Cover of Erik Löwe (ERGOSURG GmbH % It is the same as SGraamboTCPknurledgearcover but has no m1N19 gear but % a torque limited instead (Status of: 2024-10-28) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPMagnetM22, SGraamboTCPtoolM16ofCPL, % SGraamboTCPknurledgearcover % % SGall=SGraamboTCPknurledgearcoverTL([LK,"STL"]) % === INPUT PARAMETERS === % LK: % "STL": % === OUTPUT RESULTS ====== % SGall: % % EXAMPLE: % SGraamboTCPknurledgearcoverTL('STL') % % See also: SGraamboTCPMagnetM22, SGraamboTCPtoolM16ofCPL, % SGraamboTCPknurledgearcover % % % Copyright 2024 Tim C. Lueth |
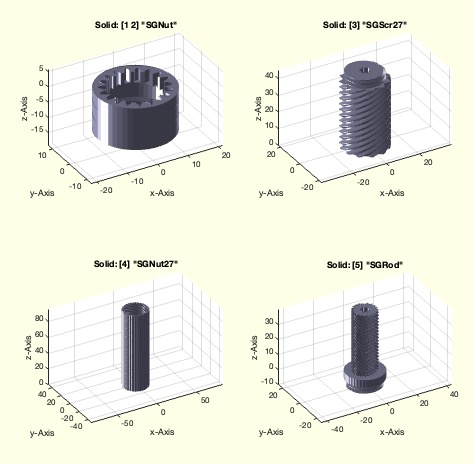
SGraamboTCPMagnetM22torquelimit(,"STL")- creates gear wheel with torque limiter for the 6th axis of Raambo |
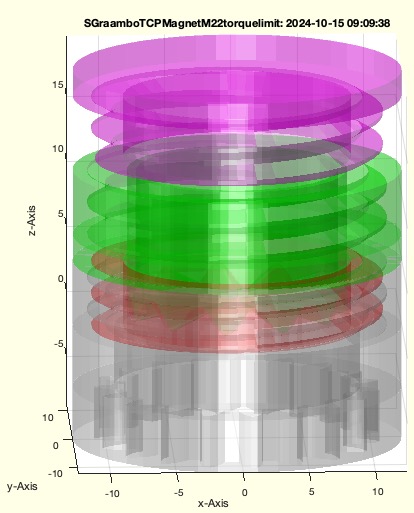 | % SGraamboTCPMagnetM22torquelimit(,"STL") - creates gear wheel with torque limiter for the 6th axis of Raambo % (by Tim Lueth, VLFL-Lib, 2024-OKT-08 as class: AUTOMATIC DESIGN) % % This fnctn creates a magnetic adapter for the Raambo 2024_V4/5/6 % designed by Erik Löwe: % m=1, n=19, h=5 with a strong magnet D18x5 and a T30 disassembly cavity % In addition to SGraamboTCPMagnetM22, this fnctn also contains a torque % limiter with an D15x8 Magnet to avoid damages during replay of recorded % movements after inserting a new tool. All parts should be printed with % 80% infill (Status of: 2024-10-15) % % Introduced first in SolidGeometry 5.4 % % See also: exp_2024_07_20_Frame85, SGmotorFeeTech40flange, % SGraamboTCPMagnetM20, SGraamboTCPtoolM16ofCPL, SGraamboTCPMagnetM22 % % [SGNut,SGScrew,SGTLU,SGTLO]=SGraamboTCPMagnetM22torquelimit([,"STL"]) % "STL": height of the inlay; default is 5 % === OUTPUT RESULTS ====== % SGNut: Gear-wheel-cap for the TCP motor of Raambo holding a magnet M18 % SGScrew: Gear-wheel-cap screw for the TCP motor of Raambo M22 with % inlay for magnet M15 % SGTLU: torque limit plate with outer thread M22 for SGNut % SGTLO: torque limit plate with inner thread M22 for SGScrew and Magnet % cavity for M15 % % EXAMPLE: % SGraamboTCPMagnetM22torquelimit % is usually called by other SGraambo functs % SGraamboTCPMagnetM22torquelimit('stl') % is usually called by other SGraambo functs % % See also: exp_2024_07_20_Frame85, SGmotorFeeTech40flange, % SGraamboTCPMagnetM20, SGraamboTCPtoolM16ofCPL, SGraamboTCPMagnetM22 % % % Copyright 2024 Tim C. Lueth |
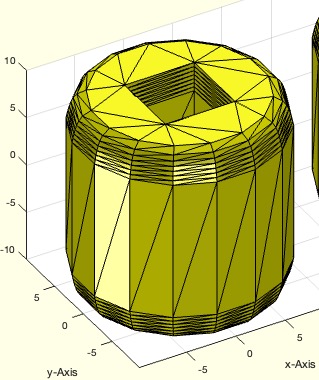
SGconvexHullsliced(SG,ra,Dcl,"debug")- creates a high resultion fittin convex contour in xy and a sliced on in z |
 | % SGconvexHullsliced(SG,ra,Dcl,"debug") - creates a high resultion fittin convex contour in xy and a sliced on in z % (by Tim Lueth, VLFL-Lib, 2024-AUG-21 as class: SURFACES) % % Slow fnctn that requires appropriate parameters! % This is the 3rd try (and 1st working version) to create such a fnctn % SGofCVLslices introduced 2017-MAI-26 % SGconvexsolidofSG introduced in 2020-AUG-15 % SGwatertightofSG introduced in 2020-AUG-28 (is not a convec shape based % on voxels) % SGconvexHullsliced tries to finish 2024-AUG-21 % In fact the fnctn CPLconvexhulloutline (2021) seems to make it possible % (Status of: 2024-08-23) % % Introduced first in SolidGeometry 5.4 % % See also: SGwatertightofSG, SGreduceVLFL, CPLconvexhulloutline, % SGofCVLslices, SGconvexsolidofSG % % [SGN,FLW,FLA,FLB]=SGconvexHullsliced(SG,[ra,Dcl,"debug"]) % === INPUT PARAMETERS === % SG: Solid Geometry % ra: z resolution and auxiliary point distance; default is [s/50 1] % Dcl: Diameter of small holes in the contour to be closed; default is 3 % for M3; % "debug": if used the creation process is shown % === OUTPUT RESULTS ====== % SGN: Convex solid [FL=[FLA;FLB;FLW] % FLW: facet list of wall % FLA: facet list of floor % FLB: facet list of cover % % EXAMPLE: % SGA=SGreadSTL('/Volumes/LUETH-WIN/RAAMBO/Raambo stls/Platte 1/2024-02-22 Kappe Motor 5.stl','','axisalign','rotx',pi,'transP',[-25 14.5 0]); % SGconvexHullsliced(SGA,[1 1],5); % SGconvexHullsliced(SGsample(5)) % SGconvexHullsliced(SGsample(22)) % % % See also: SGwatertightofSG, SGreduceVLFL, CPLconvexhulloutline, % SGofCVLslices, SGconvexsolidofSG % % % Copyright 2024 Tim C. Lueth |
SGunioncomplete(SGA,SGB,spatialrel,"debug")- Adds to a solid the part of a nother solid which is outside the convex hull |
 | % SGunioncomplete(SGA,SGB,spatialrel,"debug") - Adds to a solid the part of a nother solid which is outside the convex hull % (by Tim Lueth, VLFL-Lib, 2024-AUG-21 as class: SURFACES) % % may be later called SGunionoutside % slow fnctn because of boolean and (Status of: 2024-08-21) % % Introduced first in SolidGeometry 5.4 % % See also: SGunion, SGunionreplace, SGconvexHullsliced % % SGN=SGunioncomplete(SGA,SGB,[spatialrel,"debug"]) % === INPUT PARAMETERS === % SGA: Solid to be completed % SGB: Solid whos parts outside of SGA should be added to SGA % spatialrel: spatial relation such for SGransrelSG % "debug": if ised the creation is shown. % === OUTPUT RESULTS ====== % SGN: New combined Solid % % EXAMPLE: % SGA=SGreadSTL('/Volumes/LUETH-WIN/RAAMBO/Raambo stls/Platte 1/2024-02-22 Kappe Motor 5.stl','','axisalign','rotx',pi,'transP',[-25 14.5 0]); % SGunioncomplete(SGA,SGofCPLz(PLcircle(31/2),[-35 -10]),'alignbottom') % % See also: SGunion, SGunionreplace, SGconvexHullsliced % % % Copyright 2024 Tim C. Lueth |
SGmieleTwinDosadapter- returns a Adapter for Miele TwinDos detergent cartridges (print with 80%) |
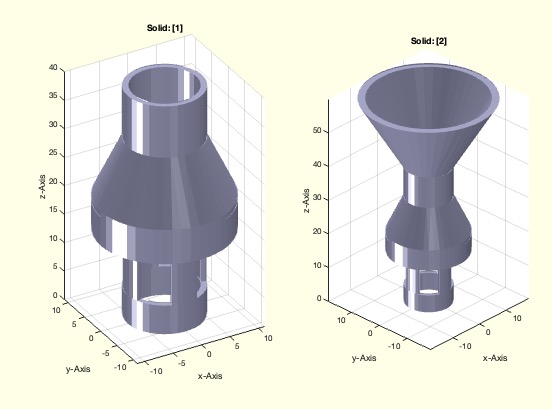 | % SGmieleTwinDosadapter - returns a Adapter for Miele TwinDos detergent cartridges (print with 80%) % (by Tim Lueth, VLFL-Lib, 2024-AUG-16 as class: PARAMETRIC DESIGN) % % Miele has washing machines in Germany on the market that dispense % detergent from two detergent cartridges under the TwinDos brand. The % detergent in these cartridges is considerably more expensive than % detergent from the drugstore. While the cartridges were still largely % self-emptying in 2016, there is now a new type of cartridge in which % 5-10% of the detergent remains unused and is thrown away. The detergent % is considered harmful to health and environment. This % SGmieleTwinDosadapter makes it possible to transfer the remaining % detergent from an “almost empty” cartridge into an “almost full” % cartridge with little skin contact, by decanting the residual liquid. % Since September 2024, Bambulab printers can print horizontal overhangs % without support structures! (Status of: 2024-08-19) % % Introduced first in SolidGeometry 5.4 % % See also: SGhook4railsquared, SGhook4rail % % SGall=SGmieleTwinDosadapter % === OUTPUT RESULTS ====== % SGall: SG of tube and tube with funnel % % EXAMPLE: % SGmieleTwinDosadapter % % See also: SGhook4railsquared, SGhook4rail % % % Copyright 2024 Tim C. Lueth |
SGmagnetcap(MDH,CDH,SDH)- returns a closed magnet adapter cap for M22 |
 | % SGmagnetcap(MDH,CDH,SDH) - returns a closed magnet adapter cap for M22 % (by Tim Lueth, VLFL-Lib, 2024-AUG-16 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPmagnetpull % % SGall=SGmagnetcap([MDH,CDH,SDH]) % === INPUT PARAMETERS === % MDH: Magnet Diameter and height; default is [15 4] % CDH: Cap Diameter and Height and Wall; default is [24.8 5 0.4] % SDH: Screw Diameter and height and Matric; default is [24.8 5 0]; 0= % Automatic Screw diameter % === OUTPUT RESULTS ====== % SGall: ={SGNut,SGScr} % % EXAMPLE: % SGmagnetcap([18 5],[24 5 0.4],[24 5 22]); SGwriteMultipleSTL(ans) % % See also: SGraamboTCPmagnetpull % % % Copyright 2024 Tim C. Lueth |
rofCPLsmalldist(CPL,)- returns the smallest distance between two contours in CPL |
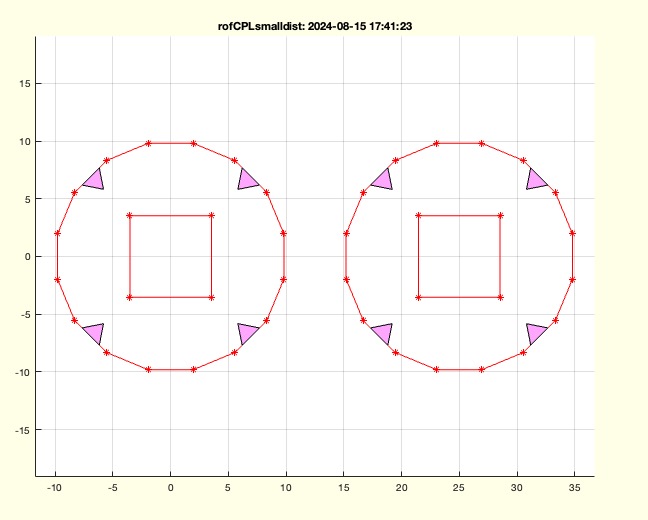 | % rofCPLsmalldist(CPL,) - returns the smallest distance between two contours in CPL % (by Tim Lueth, VLFL-Lib, 2024-AUG-15 as class: CLOSED POLYGON LISTS) % % In contrast to CPLdistancewall, this fnctn is a linear search fnctn, % that call several times CPLfindsmalldist. It is may be slow, but % helpful for automatic design based on existing STLs (Status of: % 2024-08-16) % % Introduced first in SolidGeometry 5.4 % % See also: CPLdistancewall % % rmin=rofCPLsmalldist(CPL,[]) % === INPUT PARAMETERS === % CPL: Contour % === OUTPUT RESULTS ====== % rmin: smallest distance between contours in CPL % % EXAMPLE: % rofCPLsmalldist(PLcircle(4)) % % % See also: CPLdistancewall % % % Copyright 2024 Tim C. Lueth |
SGofCPLzradialedge(CPL,z,rh,shape,style)- similar to SGofCPLzchamfer |
 | % SGofCPLzradialedge(CPL,z,rh,shape,style) - similar to SGofCPLzchamfer % (by Tim Lueth, VLFL-Lib, 2024-AUG-15 as class: SURFACES) % % extracted from SGhook4railsquared (Status of: 2024-08-16) % % Introduced first in SolidGeometry 5.4 % % See also: SGofCPLzchamfer, SGofCPLz, SGofCPLzgrow, SGofCPLzgrid % % SG=SGofCPLzradialedge([CPL,z,rh,shape,style]) % === INPUT PARAMETERS === % CPL: Contour to extrude % z: height or [zmin zmax] % rh: [radius and height] % shape: 'mattheck', 'bezier', 'circ', 'line'; default is mattheck % style: % === OUTPUT RESULTS ====== % SG: Extruded solid with round edges on bottom and top % % EXAMPLE: % SGofCPLzradialedge(CPLsample(12)) % SGofCPLzradialedge(CPLsample(12)/6,[-10 10],[1 1],'circ') % SGofCPLzradialedge(CPLsample(12),[-10 10],[1 1],'bezier') % SGofCPLzradialedge(CPLsample(12),[-10 10],[3 3],'line') % SGofCPLzradialedge(CPLsample(12),[-10 10],[3 3],'mattheck') % % See also: SGofCPLzchamfer, SGofCPLz, SGofCPLzgrow, SGofCPLzgrid % % % Copyright 2024 Tim C. Lueth |
SGraamboTCProtatingrodM16(LL,"STL")- returns a simple rod with magnet coupling and an M16 internal thread |
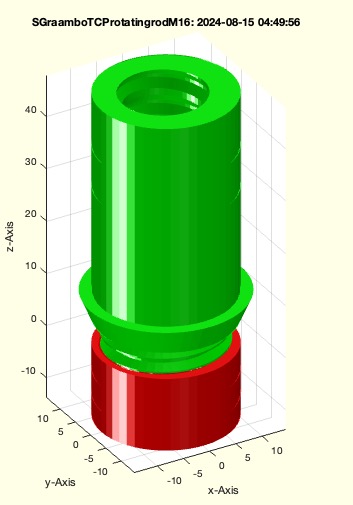 | % SGraamboTCProtatingrodM16(LL,"STL") - returns a simple rod with magnet coupling and an M16 internal thread % (by Tim Lueth, VLFL-Lib, 2024-AUG-14 as class: PARAMETRIC DESIGN) % % Uses SGraamboTCPMagnetM22 and the tool holder can be prepared with % SGraamboTCPtoolM16ofCPL in combination with SGraamboTCPtoolM16extension. % (Status of: 2024-08-15) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPtoolM16ofCPL, SGraamboTCPMagnetM22, % SGraamboTCPtoolM16extension % % SGall=SGraamboTCProtatingrodM16([LL,"STL"]) % === INPUT PARAMETERS === % LL: Length; default standard is 50 % "STL": if used an STL folder will be written % === OUTPUT RESULTS ====== % SGall: Cell arrary with Rod and Magnet screw nut % % EXAMPLE: % SGraamboTCProtatingrodM16 % % See also: SGraamboTCPtoolM16ofCPL, SGraamboTCPMagnetM22, % SGraamboTCPtoolM16extension % % % Copyright 2024 Tim C. Lueth |
SGtransrel(SG,);- returns a spatial transformed solid using SGtransrelSG |
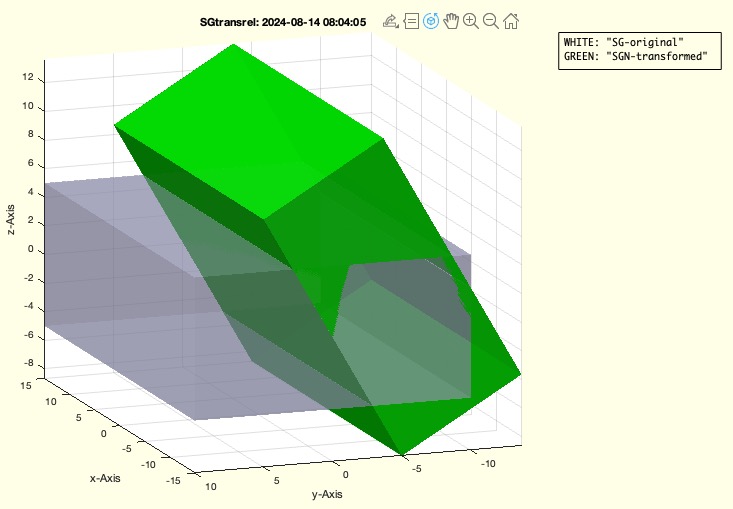 | % SGtransrel(SG,); - returns a spatial transformed solid using SGtransrelSG % (by Tim Lueth, VLFL-Lib, 2024-AUG-14 as class: ANALYTICAL GEOMETRY) % % same as SGN=SGtransrelSG (SG,'',varargin{:}) % The relative movements is with respect to the origin (Status of: % 2024-08-14) % % Introduced first in SolidGeometry 5.4 % % See also: SGtransrelSG % % SGN=SGtransrel(SG,[]); % === INPUT PARAMETERS === % SG: Solid Geometry % === OUTPUT RESULTS ====== % SGN: Spatially transformed solid % % EXAMPLE: % SGtransrel(SGbox,'ontop','rotx',pi/3) % % See also: SGtransrelSG % % % Copyright 2024 Tim C. Lueth |
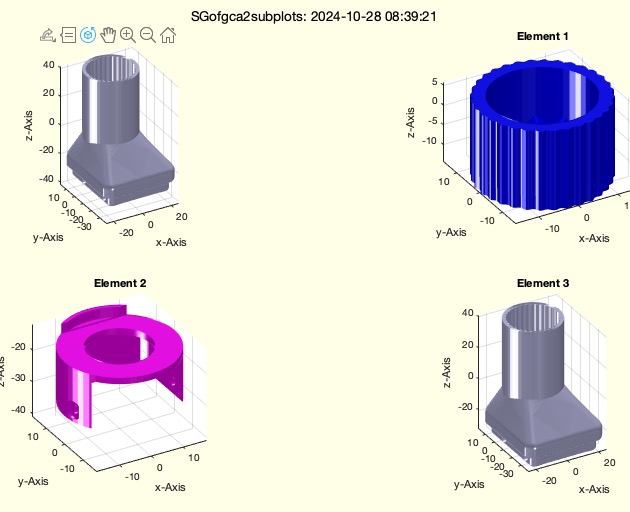
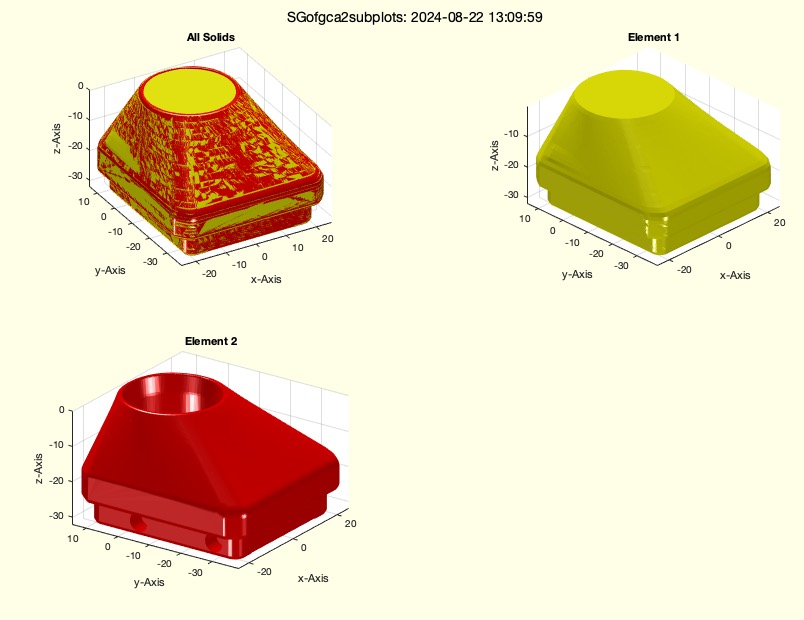
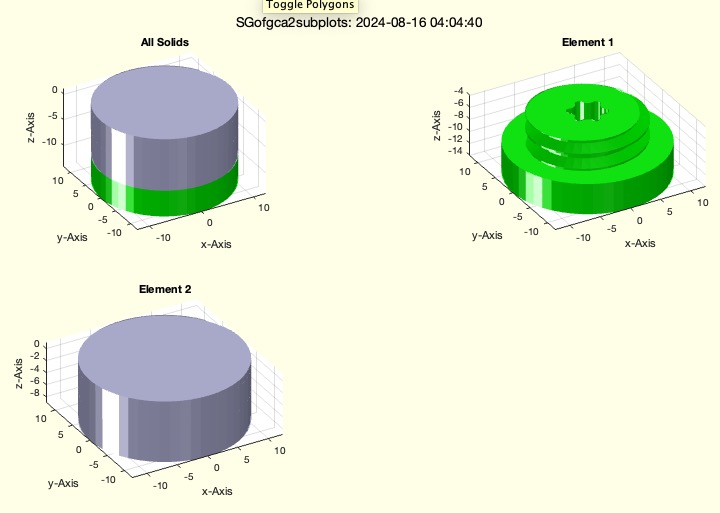
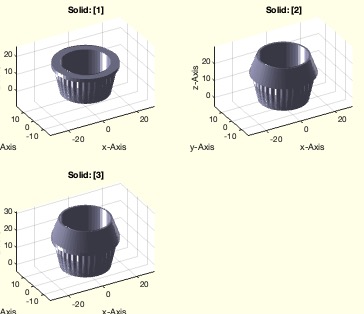
SGofgca2subplots(hgca)- takes the current gca and creates a cell list of solids/patches |
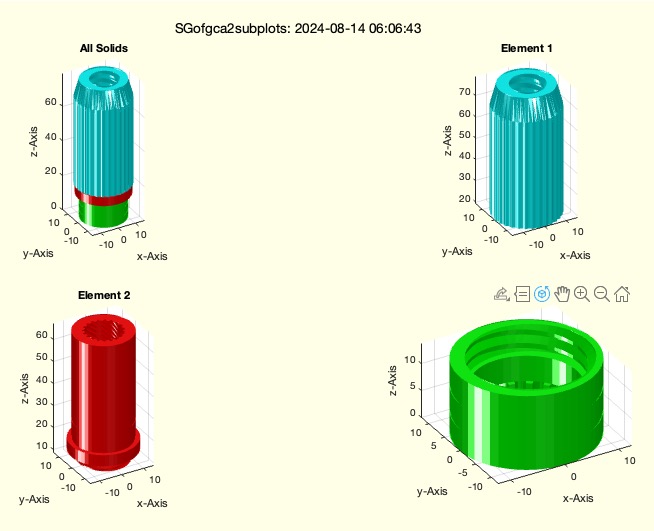 | % SGofgca2subplots(hgca) - takes the current gca and creates a cell list of solids/patches % (by Tim Lueth, VLFL-Lib, 2024-AUG-14 as class: VISUALIZATION) % % if nargout==0; the solids are plotted insubplot (Status of: 2024-08-14) % % Introduced first in SolidGeometry 5.4 % % See also: SGofgca, VLFLofgca, VLofgca, PSofgca, SGplotmultiple % % [SG,l]=SGofgca2subplots([hgca]) % === INPUT PARAMETERS === % hgca: axis to use; default is gca % === OUTPUT RESULTS ====== % SG: cell array of solids % l: patches in the given axis % % EXAMPLE: % SGraamboTCPtoolM16translation % SGofgca2subplots % % See also: SGofgca, VLFLofgca, VLofgca, PSofgca, SGplotmultiple % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPstraightmoveM16(,"STL")- returns a push-pull TCP for M16x10x5 threads |
 | % SGraamboTCPstraightmoveM16(,"STL") - returns a push-pull TCP for M16x10x5 threads % (by Tim Lueth, VLFL-Lib, 2024-AUG-13 as class: AUTOMATIC DESIGN) % % extracted from exp_2024_08_06_Frame85 and exp_2024_07_20_Frame85 % (Status of: 2024-08-14) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPcreatefulltoolset % % SGall=SGraamboTCPstraightmoveM16([,"STL"]) % "STL": if used a STL folder is written % === OUTPUT RESULTS ====== % SGall: collection of a required components for Raambo % % EXAMPLE: % SGraamboTCPstraightmoveM16 % % See also: SGraamboTCPcreatefulltoolset % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPcreatefulltoolset- this is a fnct the creates one after another all required parts for RaamboTCP tools |
 | % SGraamboTCPcreatefulltoolset - this is a fnct the creates one after another all required parts for RaamboTCP tools % (by Tim Lueth, VLFL-Lib, 2024-AUG-13 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPtoolstand, SGraamboTCPbagcutter, % SGraamboTCPknurledgearcover, SGraamboTCPgearwheeldisk, % SGraamboTCPtoolM16ofCPL, SGraamboTCPtoolM16extension, % SGgearwheelsocketspanner, SGraamboTCPtoolM16translation % % SGraamboTCPcreatefulltoolset % % EXAMPLE: % SGraamboTCPcreatefulltoolset % % See also: SGraamboTCPtoolstand, SGraamboTCPbagcutter, % SGraamboTCPknurledgearcover, SGraamboTCPgearwheeldisk, % SGraamboTCPtoolM16ofCPL, SGraamboTCPtoolM16extension, % SGgearwheelsocketspanner, SGraamboTCPtoolM16translation % % % Copyright 2024 Tim C. Lueth |
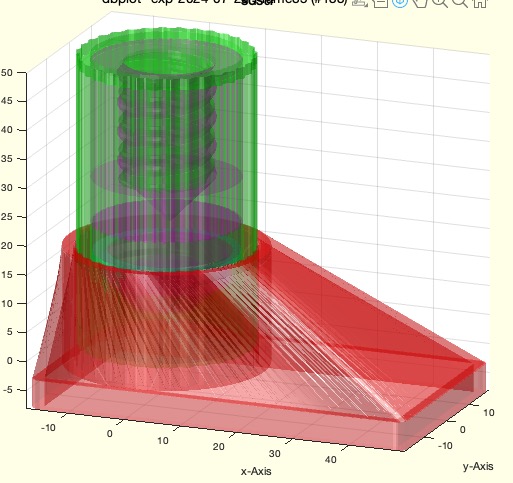
SGofCPLTL(CPLC,TL)- extrudes a contour along a path given by TL |
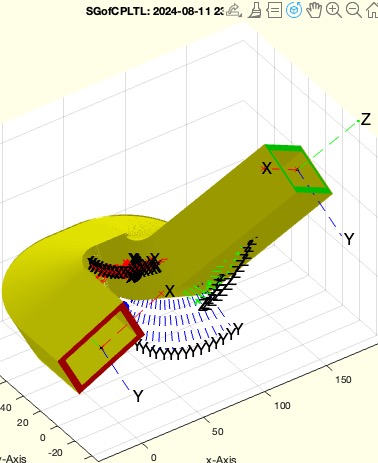 | % SGofCPLTL(CPLC,TL) - extrudes a contour along a path given by TL % (by Tim Lueth, VLFL-Lib, 2024-AUG-11 as class: SURFACES) % % Introduced first in SolidGeometry 5.4 % % See also: SGofCPLz, SGofCPLzgrow, SGofCPLzgrid, TLofCVL % % [SGN,NFW,FLA,FLB]=SGofCPLTL(CPLC,TL) % === INPUT PARAMETERS === % CPLC: Contour to extrude along TL % TL: array [4,4,n] of the path % === OUTPUT RESULTS ====== % SGN: Final Solid including VL, FL % NFW: just FL of the walls % FLA: just FL of the floor % FLB: just FL of the ceiling % % EXAMPLE: CPLC=PLsquare([60 40]); % CPLC=[CPLC;nan nan;CPLbuffer(CPLC,-5)]; % % PL=[0 0; 0 80; 80 80; 80 40; 160 0]; % PL=VLaddz(PL); PL(end,3)=80; % Ro=rofcirclearoundCPL(CPLC); % TL=TLofCVL(PL,Ro*1.1,'','','rad',false); % % SGofCPLTL(CPLC,TL) % % See also: SGofCPLz, SGofCPLzgrow, SGofCPLzgrid, TLofCVL % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPtoolstand- returns a tool stand for a designers desktop |
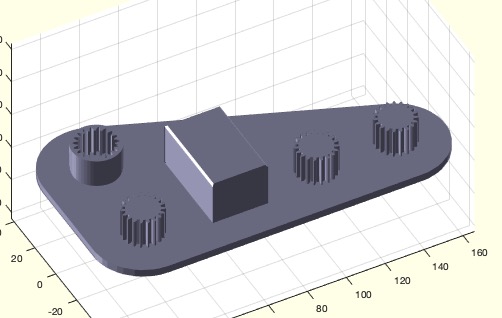 | % SGraamboTCPtoolstand - returns a tool stand for a designers desktop % (by Tim Lueth, VLFL-Lib, 2024-AUG-11 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPmagnetpull, SGraamboTCPmagnetpush, % SGgearwheelsocketspanner, SGraamboTCPbagcutter, SGraamboTCPMagnetM22, % SGraamboTCPknurledgearcover, SGraamboTCPgearwheeldisk % % SGall=SGraamboTCPtoolstand % === OUTPUT RESULTS ====== % SGall: Final solid for the desktop % % EXAMPLE: % SGraamboTCPtoolstand % % See also: SGraamboTCPmagnetpull, SGraamboTCPmagnetpush, % SGgearwheelsocketspanner, SGraamboTCPbagcutter, SGraamboTCPMagnetM22, % SGraamboTCPknurledgearcover, SGraamboTCPgearwheeldisk % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPmagnetpull(,"STL")- returns a magnet releasing tool for the Raambo robot |
 | % SGraamboTCPmagnetpull(,"STL") - returns a magnet releasing tool for the Raambo robot % (by Tim Lueth, VLFL-Lib, 2024-AUG-11 as class: PARAMETRIC DESIGN) % % This TCP components are used to pull back a tool such as a magnet % 2024-08-11 by Tim Lueth von 0300 - 0400. This design has the % disadvantage that the magnet sticks to the target and the two threads % come loose when it is pulled back. For this reason, there will be a % second design with only one type of thread. (Status of: 2024-08-19) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPMagnetM22, SGraamboTCPknurledgearcover, % SGraamboTCPmagnetpush % % SGraamboTCPmagnetpull([,"STL"]) % "STL": if used an STL folder will be written including XX comments % % EXAMPLE: % SGraamboTCPmagnetpull(40) % % See also: SGraamboTCPMagnetM22, SGraamboTCPknurledgearcover, % SGraamboTCPmagnetpush % % % Copyright 2024 Tim C. Lueth |
humidityoftemp(th,t2)- calculates the humidity at temperature change |
 | % humidityoftemp(th,t2) - calculates the humidity at temperature change % (by Tim Lueth, VLFL-Lib, 2024-AUG-11 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.4 % % See also: Gauge2mm, mm2inch, Charriere2mm, French2mm % % h2=humidityoftemp([th,t2]) % === INPUT PARAMETERS === % th: [temperatur humidity] at the moment % t2: [new temperatur] % === OUTPUT RESULTS ====== % h2: humidity of t2 is reached and there is no water change % % EXAMPLE: % humidityoftemp([27.6 56],25.8) % % See also: Gauge2mm, mm2inch, Charriere2mm, French2mm % % % Copyright 2024 Tim C. Lueth |
SGnamedset(Solids)- creates a textfield to understand the parameters of the solid |
 | % SGnamedset(Solids) - creates a textfield to understand the parameters of the solid % (by Tim Lueth, VLFL-Lib, 2024-AUG-11 as class: AUXILIARY PROCEDURES) % % This fnctn is used before SGwriteMultipleSTL to make sure that some % information at least the variable name in fnctn is known. The fnctn % does not allow the use of calculated solids, only solids by variable % name % (Status of: 2024-08-11) % % Introduced first in SolidGeometry 5.4 % % See also: SGwriteMultipleSTL, SGstampname % % SGall=SGnamedset([Solids]) % === INPUT PARAMETERS === % Solids: Solid Geometries as varargin separated by comma % === OUTPUT RESULTS ====== % SGall: SG cell list including stampnames and stampdates % % % EXAMPLE: A=SGbox, B=SGbox % % SGall=SGnamedset(A,B,A,B) % % See also: SGwriteMultipleSTL, SGstampname % % % Copyright 2024 Tim C. Lueth |
SGgearwheelsocketspanner(mnw,H,HN,"STL")- This is a socket spanner mit clearance fitting for screws |
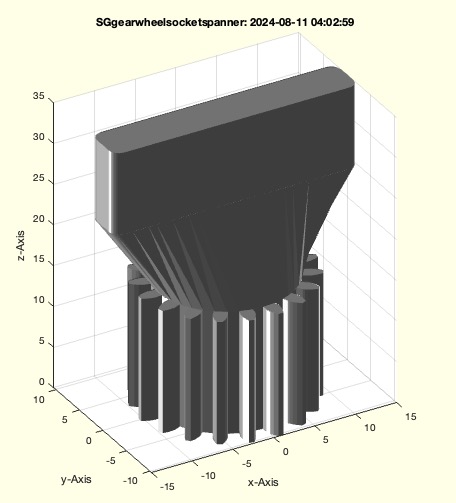 | % SGgearwheelsocketspanner(mnw,H,HN,"STL") - This is a socket spanner mit clearance fitting for screws % (by Tim Lueth, VLFL-Lib, 2024-AUG-11 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: PLwrench, SGwrenchsocketspanner % % [SG,CPLC]=SGgearwheelsocketspanner([mnw,H,HN,"STL"]) % === INPUT PARAMETERS === % mnw: [module, n-teeth, reduction from feet-diameter]; default is [1 19 % 0] % H: Height of gear; default is 15 % HN: [Length Width Height height adapter] of handle; default is [30 5 10 % 10] % "STL": if used, an STL folder will be written % === OUTPUT RESULTS ====== % SG: Solid Geometry of Wrench socket spanner % CPLC: Contour used % % EXAMPLE: % SGgearwheelsocketspanner([1 32 -5]) % % See also: PLwrench, SGwrenchsocketspanner % % % Copyright 2024 Tim C. Lueth |
SGprinterstand- creates posts or stands for furniture or in this case hp laser printer |
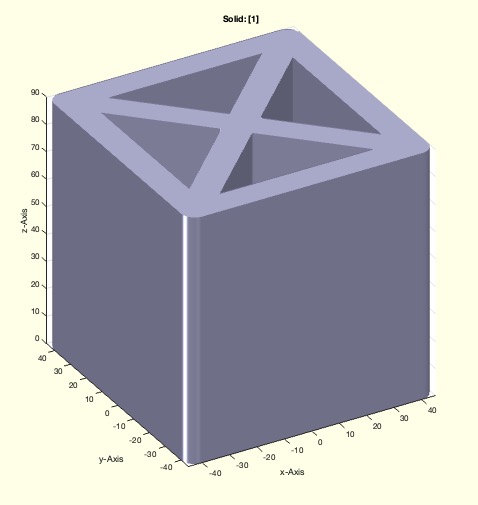 | % SGprinterstand - creates posts or stands for furniture or in this case hp laser printer % (by Tim Lueth, VLFL-Lib, 2024-AUG-09 as class: PARAMETRIC DESIGN) % % 90 x 90 x 90 takes 3.5h per box on the bambu-lab (Status of: 2024-08-10) % % Introduced first in SolidGeometry 5.4 % % See also: SGbarcelonaspacer, SGfurniturespacer % % SGprinterstand % % EXAMPLE: % SGprinterstand % % See also: SGbarcelonaspacer, SGfurniturespacer % % % Copyright 2024 Tim C. Lueth |
XXprintmode(md)- switches on the possibility to reach code lines when using dbprintf fnct |
 | % XXprintmode(md) - switches on the possibility to reach code lines when using dbprintf fnct % (by Tim Lueth, VLFL-Lib, 2024-AUG-09 as class: LANGUAGE PROCEDURES) % % In SGLib 5.4, the concept of executed comments has been introduced. % This fnctn allows to switch on and off the comments on the screen % output in addition to the file comment protocol (Status of: 2024-08-09) % % Introduced first in SolidGeometry 5.4 % % See also: XX, XXreadcomment % % XXmode=XXprintmode([md]) % === INPUT PARAMETERS === % md: true or false; default is true; % === OUTPUT RESULTS ====== % XXmode: true or false % % EXAMPLE: % can be tested only within functns that uses the XX comment concept % % XXprintmode on % XXprintmode off % % % See also: XX, XXreadcomment % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPtoolM16extension(PL)- creates a tool extension for different geometries with a M16x10x5 Screw and Nut |
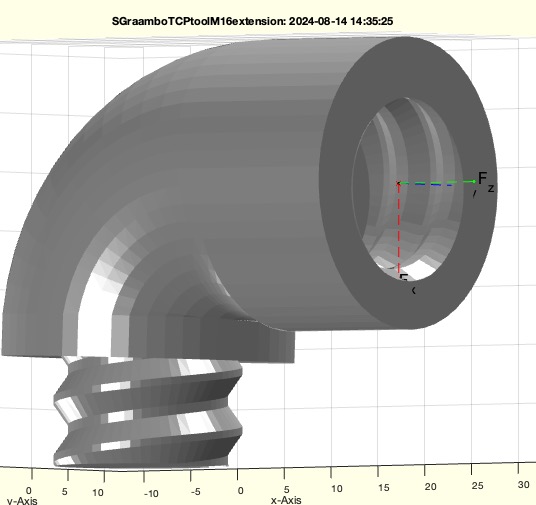 | % SGraamboTCPtoolM16extension(PL) - creates a tool extension for different geometries with a M16x10x5 Screw and Nut % (by Tim Lueth, VLFL-Lib, 2024-AUG-04 as class: PARAMETRIC DESIGN) % % used in combination with SGraamboTCPtoolM16ofCPL (Status of: 2024-08-11) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPtoolM16ofCPL % % SGN=SGraamboTCPtoolM16extension([PL]) % === INPUT PARAMETERS === % PL: Point list; default is PL=[0 -1; 0 15; 30 15] ; % === OUTPUT RESULTS ====== % SGN: Solid with Screw and Nut % % EXAMPLE: % Rr=15; PL=[0 -1; 0 Rr; 2*Rr Rr] ; % % See also: SGraamboTCPtoolM16ofCPL % % % Copyright 2024 Tim C. Lueth |
exp_2024_08_04_DIN13(t,p,a)- returns a screw and a nut for an arbitrary steep thread for testing different thread geometries |
 | % exp_2024_08_04_DIN13(t,p,a) - returns a screw and a nut for an arbitrary steep thread for testing different thread geometries % (by Tim Lueth, VLFL-Lib, 2024-AUG-04 as class: EXPERIMENTS) % % Fnctn SGDIN13 has some hidded features for designing steep thread % geometries not only by scaling the thread geometry. Neverheless, those % modified thread geometries require exact calcuation of fits and thread % geometries % The most important thing is that a steep thread loses its self-locking % effect and therefore a translational movement can also be converted % into a rotational movement (Status of: 2024-08-04) % % Introduced first in SolidGeometry 5.4 % % See also: SGDIN13, slpitch % % exp_2024_08_04_DIN13([t,p,a]) % === INPUT PARAMETERS === % t: Type "A" or "B" or "C" or "D" - not all are correctly implemented % p: pitch; 0 => DIN13 % a: 's' screw, or 'n' nut or 'b' both; default is both % % EXAMPLE: % exp_2024_08_04_DIN13('B',20) % % See also: SGDIN13, slpitch % % % Copyright 2024 Tim C. Lueth |
slpitch(D,p)- returns the required fit dimension for steep screw thread |
 | % slpitch(D,p) - returns the required fit dimension for steep screw thread % (by Tim Lueth, VLFL-Lib, 2024-AUG-04 as class: KINEMATICS AND FRAMES) % % The DIN13 thread is designed for a clearance fit during screw movement. % For this reason, the screw nut must have a shrink of slfit('c') % ("clearance fit") so that a printed screw can be moved in the screw % nut. In the case of a steep thread, however, the unexpected pitch % causes jamming. This fnctn calculates the necessary clearance for a % steep thread. The normal pitch angle for DIN13 is 28.5 degrees and the % necessary clearance is 0.24. For steep threads, the fit must be % increased. % slpitch is required if the original thread geometry is maintained; Type % "B" or Type "C" (Status of: 2024-08-04) % % Introduced first in SolidGeometry 5.4 % % See also: SGDIN13, PLthreadDIN, exp_2024_08_04_DIN13 % % slp=slpitch([D,p]) % === INPUT PARAMETERS === % D: Diameter in mm % p: pitch; default is pitch of DIN13 % === OUTPUT RESULTS ====== % slp: required distance for steep screw threads % % EXAMPLE: % SGDIN13(-16,40,8,PLcircle(24/2),slpitch(16,8),'Type','B') % NUT for Steep thread type B % SGDIN13(+16,40,8,PLwrench(6+slfit('c'),6),0,'Type','B') % SCREW for Steep thread type B % % See also: SGDIN13, PLthreadDIN, exp_2024_08_04_DIN13 % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPbagcutter(,"STL")- returns a solid that can cut a sterile bag in combination mit the knurled gear cover of Raambo robot |
 | % SGraamboTCPbagcutter(,"STL") - returns a solid that can cut a sterile bag in combination mit the knurled gear cover of Raambo robot % (by Tim Lueth, VLFL-Lib, 2024-AUG-03 as class: PARAMETRIC DESIGN) % % creates three design for a bag cutting plug into the knurled tube % (Status of: 2024-08-04) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPknurledgearcover, SGraamboTCPgearwheeldisk % % [SGC,SGG,SGH]=SGraamboTCPbagcutter([,"STL"]) % "STL": if used, an STL folder will be written % === OUTPUT RESULTS ====== % SGC: dumb plug % SGG: plug with small straight and then tampered open tip % SGH: plug with tampered open tip % % See also: SGraamboTCPknurledgearcover, SGraamboTCPgearwheeldisk % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPgearwheeldisk(,"STL")- returns the gearwheeldisk of the Raambo robot as designed by Erik Löwe |
 | % SGraamboTCPgearwheeldisk(,"STL") - returns the gearwheeldisk as designed by Erik Löwe % (by Tim Lueth, VLFL-Lib, 2024-AUG-03 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPknurledgearcover % % SGP=SGraamboTCPgearwheeldisk([,"STL"]) % "STL": if used an SATL folder is written in the desktopdir % === OUTPUT RESULTS ====== % SGP: SG of gear wheel disk % % EXAMPLE: % SGraamboTCPgearwheeldisk('stl') % % See also: SGraamboTCPknurledgearcover % % % Copyright 2024 Tim C. Lueth |
SGhook4railsquared(DR,d,"shape")- creates a hook for squared shaped rails |
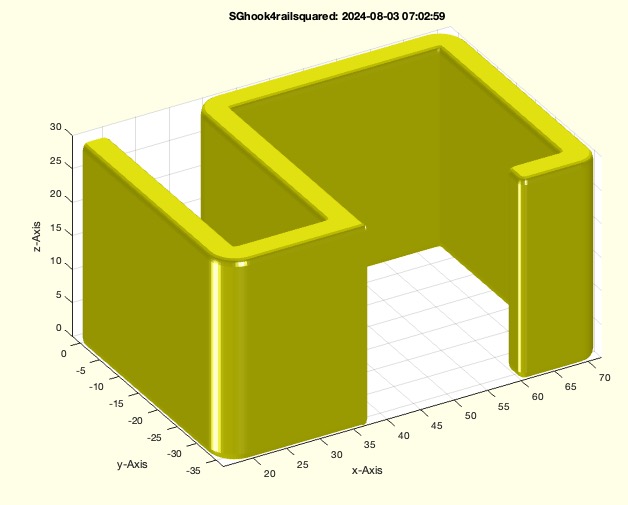 | % SGhook4railsquared(DR,d,"shape") - creates a hook for squared shaped rails % (by Tim Lueth, VLFL-Lib, 2024-AUG-03 as class: PARAMETRIC DESIGN) % % EXPERIMENT to create a new SGofCPLzchamfer fnctn % The SGofCPLzchamfer fnctn fails and suffers from the fact that % top/bottom faces are missing or not filled correctly % In addition the varity of different edges such as from PLchamfer are % not used. % (Status of: 2024-08-03) % % Introduced first in SolidGeometry 5.4 % % See also: PLchamfer, SGhook4rail % % SG=SGhook4railsquared([DR,d,"shape"]) % === INPUT PARAMETERS === % DR: polyline small fnctn; default is 31 % d: thickness of the hook % "shape": fnctn works with 'line','bezier','circ','mattheck'; default is % 'mattheck' % === OUTPUT RESULTS ====== % SG: Final solid geometry % % EXAMPLE: % SGhook4railsquared(31,4,'shape','circ') % % See also: PLchamfer, SGhook4rail % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPknurledgearcover- returns a knurled tube TCP cover for Raambo robot |
 | % SGraamboTCPknurledgearcover - returns a knurled tube TCP cover for Raambo % (by Tim Lueth, VLFL-Lib, 2024-JUL-31 as class: AUTOMATIC DESIGN) % % based on the TCP Cover of Erik Löwe (ERGOSURG GmbH) (Status of: % 2024-08-01) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPMagnetM22, SGraamboTCPtoolM16ofCPL % % SGraamboTCPknurledgearcover % % See also: SGraamboTCPMagnetM22, SGraamboTCPtoolM16ofCPL % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPtoolM16ofCPL(CPLP,"STL")- returns a tool holder for an M16x10 5mm pitch for the Raambo robot |
 | % SGraamboTCPtoolM16ofCPL(CPLP,"STL") - returns a tool holder for an M16x10 5mm pitch for the Raambo robot % (by Tim Lueth, VLFL-Lib, 2024-JUL-28 as class: SERIAL-ROBOTICS) % % Introduced first in SolidGeometry 5.4 % % See also: exp_2024_07_20_Frame85, SGmotorFeeTech40flange, % SGraamboTCPMagnetM22, SGraamboTCPknurledgearcover % % SGPG=SGraamboTCPtoolM16ofCPL([CPLP,"STL"]) % === INPUT PARAMETERS === % CPLP: Cross section of object to hold % "STL": if used an STL folder is written % === OUTPUT RESULTS ====== % SGPG: Solid of probe guide with M16x10 pitch 5mm % % EXAMPLE: % SGraamboTCPtoolM16ofCPL(PLcircle(5+slfit('c'))); %% uniball eye fine % SGraamboTCPtoolM16ofCPL(PLsquare([6.3,11.9])+2*slfit('t')); %% Stammberger hand pice 6.3 x 11.9 % % See also: exp_2024_07_20_Frame85, SGmotorFeeTech40flange, % SGraamboTCPMagnetM22, SGraamboTCPknurledgearcover % % % Copyright 2024 Tim C. Lueth |
PLdiamond(dim,al)- returns a diamond shape optonal als convex hull for a CPL |
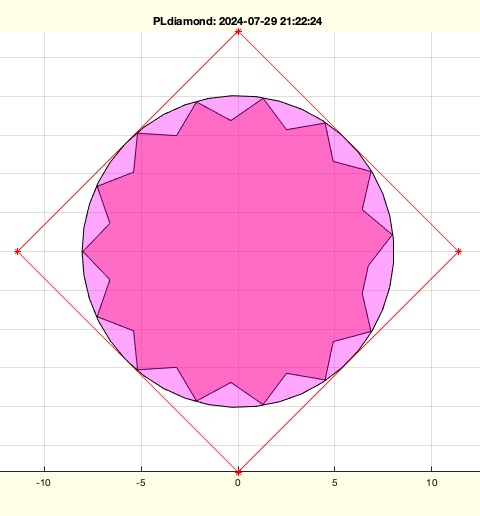 | % PLdiamond(dim,al) - returns a diamond shape optonal als convex hull for a CPL % (by Tim Lueth, VLFL-Lib, 2024-JUL-28 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.4 % % See also: PLknurled, PLcircle, PLcircseg, PLevolvente, PLgearDIN, % PLhelix, PLkidney, PLrand, PLspiral, PLsquare % % PL=PLdiamond([dim,al]) % === INPUT PARAMETERS === % dim: [width height] or CPL % al: angle, currently unsused, i.e. 45 deg % === OUTPUT RESULTS ====== % PL: CPL of a diamond in dim or that is a hull for the CPL % % EXAMPLE: % PLdiamond([10 20]) % PLdiamond with size dimension % PLdiamond(PLstar(8)) % PLdiamond with a shape % % % See also: PLknurled, PLcircle, PLcircseg, PLevolvente, PLgearDIN, % PLhelix, PLkidney, PLrand, PLspiral, PLsquare % % % Copyright 2024 Tim C. Lueth |
SGaxisalignment(SG)- aligns large planar surfaces of a solids to the main axis |
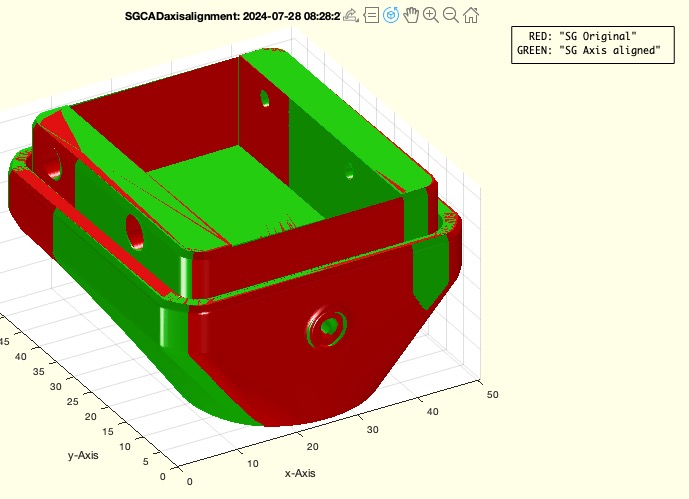 | % SGaxisalignment(SG) - aligns large planar surfaces of a solids to the main axis % (by Tim Lueth, VLFL-Lib, 2024-JUL-28 as class: SURFACES) % % If STL files are generated from STEP or IGES files that are created % with CAD programs such as CATIA or SolidWorks and then exported, the % bodies are sometimes slightly rotated. This fnctn then aligns the body % to the main axes without changing the position of the body. % It became also available in "SGtransrelSG" als "axisalign". (Status of: % 2024-07-28) % % Introduced first in SolidGeometry 5.4 % % See also: SGreadSTL, SGtransrelSG % % SG=SGaxisalignment(SG) % === INPUT PARAMETERS === % SG: Original Solid % === OUTPUT RESULTS ====== % SG: Solid aligned to main axis % % EXAMPLE: % SGreadSTL('/Volumes/LUETH-WIN/RAAMBO/Raambo stls/Platte 1/2024-07-17 Raambo V4 alle aktuellen Druckteile.stl'); SG=ans; % SGaxisalignment(SG) % SGreadSTL('/Volumes/LUETH-WIN/RAAMBO/Raambo stls/Platte 1/2024-07-17 Raambo V4 alle aktuellen Druckteile.stl','','axisalign'); % % See also: SGreadSTL, SGtransrelSG % % % Copyright 2024 Tim C. Lueth |
SGraamboTCPMagnetM22(CPLu,hcpl,"STL")- creates gear wheel for the 6th axis of Raambo |
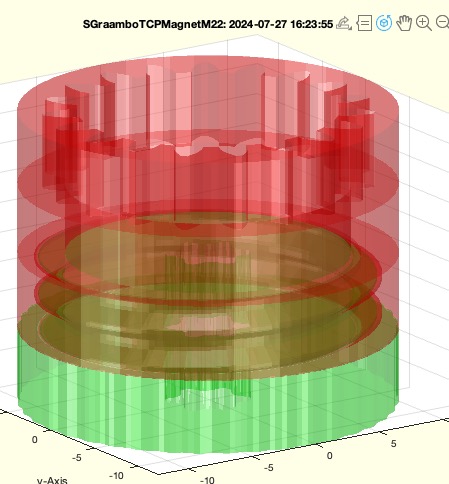 | % SGraamboTCPMagnetM22(CPLu,hcpl,"STL") - creates gear wheel for the 6th axis of Raambo % (by Tim Lueth, VLFL-Lib, 2024-JUL-27 as class: AUTOMATIC DESIGN) % % This fnctn creates a magnetic adapter for the Raambo 2024_V4/5/6 % designed by Erik Löwe: % m=1, n=19, h=5 with a strong magnet D18x5 and a T30 disassembly cavity % (Status of: 2024-10-15) % % Introduced first in SolidGeometry 5.4 % % See also: exp_2024_07_20_Frame85, SGmotorFeeTech40flange, % SGraamboTCPMagnetM20, SGraamboTCPtoolM16ofCPL, % SGraamboTCPMagnetM22torquelimit % % [SGNut,SGScr]=SGraamboTCPMagnetM22([CPLu,hcpl,"STL"]) % === INPUT PARAMETERS === % CPLu: Contour of an inlay % hcpl: height of the inlay; default is 5 % "STL": if used an STL File of both parts are written % === OUTPUT RESULTS ====== % SGNut: Gear-wheel-cap for the TCP motor of Raambo holding a magnet % SGScr: Gear-wheel-cap screw for the TCP motor of Raambo M22 % % EXAMPLE: % SGraamboTCPMagnetM22 % is usually called by other SGraambo functs % SGraamboTCPMagnetM22('stl') % is usually called by other SGraambo functs % % See also: exp_2024_07_20_Frame85, SGmotorFeeTech40flange, % SGraamboTCPMagnetM20, SGraamboTCPtoolM16ofCPL, % SGraamboTCPMagnetM22torquelimit % % % Copyright 2024 Tim C. Lueth |
SGtrialerror- generates an error message indicating a new attempt |
 | % SGtrialerror - generates an error message indicating a new attempt % (by Tim Lueth, VLFL-Lib, 2024-JUL-27 as class: LANGUAGE PROCEDURES) % % Some routines such as the boolean operation of surface models are not % numerically stable, which is why random changes are made to the % coordinates. Nevertheless, it is not always possible to calculate a % result. This is not always a problem for the design. For example, if a % labelling is not engraved, then only the labelling is missing, but the % mechanical fnctn is fulfilled. However, there are cases in which a % failed subtraction, for example, renders further design steps % pointless. In this case, the only option is to call the fnctn again in % the hope that the numerics will then work better. Trail and error % (Status of: 2024-07-27) % % Introduced first in SolidGeometry 5.4 % % See also: SGisidentical, dbreturn, lastwarn % % SGtrialerror % % EXAMPLE: % if SGisidentical(SGTL,SGTL1); SGtrialerror; end; % % SGAN=SGsubtract(SGA,SGvaryfrom(SGX)); if startsWith(lastwarn,'"SGsubtract'); SGtrialerror; end; % % % % See also: SGisidentical, dbreturn, lastwarn % % % Copyright 2024 Tim C. Lueth |
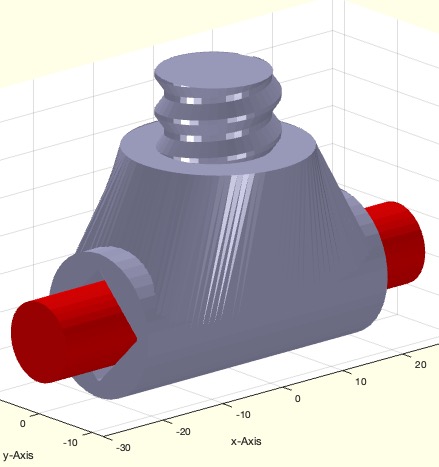
SGmotorFeeTech40flange ()- robot servo motor flange |
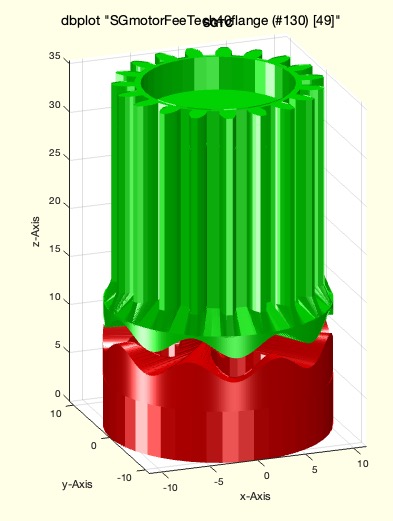 | % SGmotorFeeTech40flange () - robot servo motor flange % (by Tim Lueth, VLFL-Lib, 2024-JUL-25 as class: SERIAL-ROBOTICS) % % One problem with connecting shafts to metal servo motor output gears is % that the screw connection is axial. The metal output gear is placed % directly on the pinion shaft via internal gearing and screwed centrally % with a screw. If we now want to screw our own gear onto the output gear % in the axial direction, the screw heads will reach the outer edge of % the output gear and therefore a printed output gear is only possible if % the diameter of the base circle is larger than the diameter of the % gear. If the outer diameter of the tooth circle is to be as large as % the diameter of the output gear, a different solution with an axial % torque coupling is required. % The design that Tim Lueth invented for the servo motor already exists % in a very similar form under the name guide pot with detent disc from % the company Ganternorm. It can also be used with a spring element % between the detent discs for coupling if no magnet is used. In contrast % to Ganternorm, however, the routine can design any size. % % This construction consist of a % a) guide pot (Führungstopf GN187,1) % b) Locking plates (Rastscheibe GN187.4) % c) Locking plates (Rastscheibe GN187.4) % d) Standard gearing (module 1, 19 teeth) (Status of: 2024-07-27) % % Introduced first in SolidGeometry 5.4 % % See also: SGraamboTCPMagnetM20 % % SGmotorFeeTech40flange([]) % % Additional Hyperlinks: % Ganter Norm, Ganter Norm (US), Elesa & Ganter % % EXAMPLE: % SGmotorFeeTech40flange(10,[15 3],'stl') % Returns two parts for an SM40BL motor m1n19 Gear % % See also: SGraamboTCPMagnetM20 % % % Copyright 2024 Tim C. Lueth |
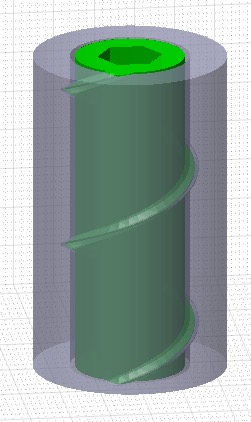
SGofCPLzscrew(CPL,z,M,ht,z0,"STL")- Extrudes a CPL in z with an internal scew to print the part separately as FDM |
 | % SGofCPLzscrew(CPL,z,M,ht,z0,"STL") - Extrudes a CPL in z with an internal scew to print the part separately as FDM % (by Tim Lueth, VLFL-Lib, 2024-JUL-24 as class: AUTOMATIC DESIGN) % % Took 45 minutes from idea to documented fnctn including testing on a % Bambuu X1C (Status of: 2024-07-24) % % Introduced first in SolidGeometry 5.4 % % See also: SGofCPLz % % [SGScr,SGNut]=SGofCPLzscrew(CPL,[z,M,ht,z0,"STL"]) % === INPUT PARAMETERS === % CPL: Conotur to extrude % z: z or [zmin zmax] % M: metric diameter of a screw; default is automatic % ht: height and minimal wall thickness of the thread; default is [5 1.2] % z0: cutting position; default is the middle % "STL": if used an STL folder is written % === OUTPUT RESULTS ====== % SGScr: Lower part with the screw % SGNut: Upper part containing nut and cap % % EXAMPLE: % SGofCPLzscrew(PLsquare(8),[-10 10]) % SGofCPLzscrew(PLstar(8),[-10 10]) % % See also: SGofCPLz % % % Copyright 2024 Tim C. Lueth |
SGmotorFeeTech40(,"STL")- returns a model of an SM40BL that can be printed and moved passively |
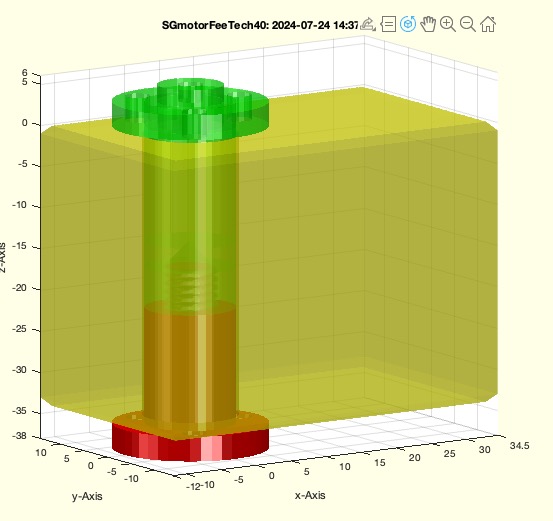 | % SGmotorFeeTech40(,"STL") - returns a model of an SM40BL that can be printed and moved passively % (by Tim Lueth, VLFL-Lib, 2024-JUL-24 as class: MODELING PROCEDURES) % % This is a STL model that is able to move (Status of: 2024-07-24) % % Introduced first in SolidGeometry 5.4 % % See also: SGmotorFeeTech % % SGall=SGmotorFeeTech40([,"STL"]) % "STL": if used the parts are written into an STL folder % === OUTPUT RESULTS ====== % SGall: Screw, Nut and Box % % Additional Hyperlinks: % Specification SM40BL, Specification SM85CL, Specification SM120BL % % EXAMPLE: % SGmotorFeeTech40 % % See also: SGmotorFeeTech % % % Copyright 2024 Tim C. Lueth |
CPLraamboTCPgearnut(,"STL")- returns the CPL of the Raambo-Robot TCP gear wheel |
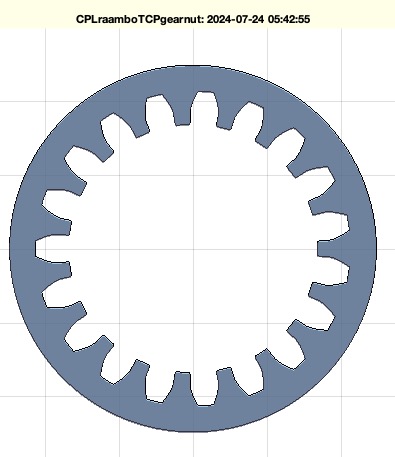 | % CPLraamboTCPgearnut(,"STL") - returns the CPL of the Raambo-Robot TCP gear wheel % (by Tim Lueth, VLFL-Lib, 2024-JUL-24 as class: PARAMETRIC DESIGN) % % Currently only available from Tim Lueth if 1st parameter is requested % The gear wheel is module 1 and has 19 teeth and outer diameter of 24.8 % Motoro SM40BL alle Schrauben M3x5 or M3x3 (Status of: 2024-07-24) % % Introduced first in SolidGeometry 5.4 % % See also: PLgearDIN, SGraamboTCPMagnetM20 % % [CPLO,CPLi,CPLo]=CPLraamboTCPgearnut([,"STL"]) % "STL": if used, test solds are written to folder % === OUTPUT RESULTS ====== % CPLO: Outer contour designed by EL % CPLi: Inner contour as DIN13 using slfit('t') % CPLo: outer contour as DIN13 using slfit('t') and D=24.8 % % EXAMPLE: % CPLraamboTCPgearnut % % % See also: PLgearDIN, SGraamboTCPMagnetM20 % % % Copyright 2024 Tim C. Lueth |
CPLofSGFSselect(SG,FSselectors)- returns the CPL of a SG by FS selection |
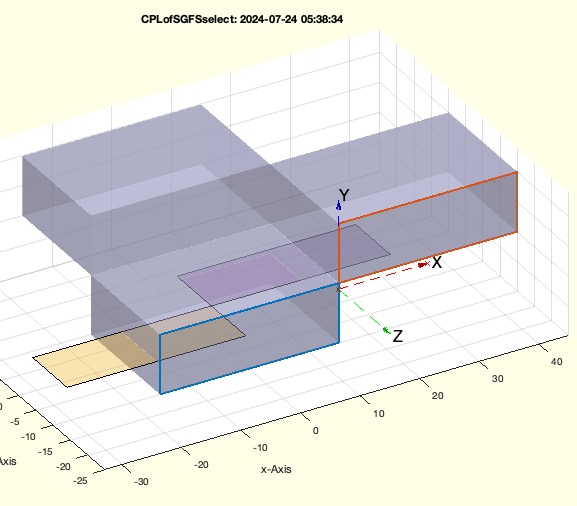 | % CPLofSGFSselect(SG,FSselectors) - returns the CPL of a SG by FS selection % (by Tim Lueth, VLFL-Lib, 2024-JUL-24 as class: CLOSED POLYGON LISTS) % % Powerful sequential use of FSselect(SG,'array',..) and CPLofFS % used first time in SGdesignTongueGrooveAxial % (Status of: 2024-07-24) % % Introduced first in SolidGeometry 5.4 % % See also: CPLofSGhull, FSselect, CPLofFS % % [CPLC,T]=CPLofSGFSselect(SG,[FSselectors]) % === INPUT PARAMETERS === % SG: Solid Geometry % FSselectors: FS selector sequence % === OUTPUT RESULTS ====== % CPLC: Contour % T: Koordinate System to move the CPL in space - Different to T in SGLib % 5.3 % % EXAMPLE: % FSselect(SGsample(40),[0 -1 0],'array','front',-1,1:2) % CPLofSGFSselect(SGsample(40),[0 -1 0],'array','front',-1,1:2) % CPLofSGFSselect(SGsample(40),[0 +1 0],'array','front',-1) % % See also: CPLofSGhull, FSselect, CPLofFS % % % Copyright 2024 Tim C. Lueth |
SGofCPLzbellows(CPL,z,wave,"STL")- create a stright bellows based on a CPL |
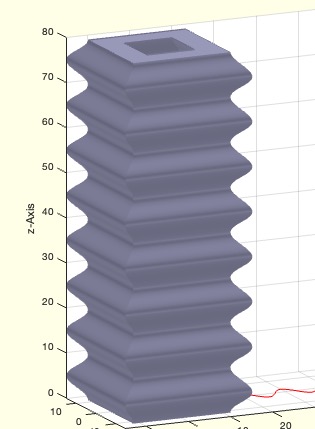 | % SGofCPLzbellows(CPL,z,wave,"STL") - create a stright bellows based on a CPL % (by Tim Lueth, VLFL-Lib, 2024-JUL-22 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGofCPLz, SGofCPLzgrow % % SG=SGofCPLzbellows([CPL,z,wave,"STL"]) % === INPUT PARAMETERS === % CPL: Contour % z: z or [zmin zmax] % wave: [widht-wave height-wafe start-end straight resolution] % "STL": if used a folder will be written % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % CPL=PLsquare([60 40]); CPL=[CPLbuffer(CPL,.8);nan nan;CPL]; dbplot(CPL) % SGofCPLzbellows(CPL,100) % SGofCPLzbellows(CPL,[-30 4],[2.5 10 0]); % % See also: SGofCPLz, SGofCPLzgrow % % % Copyright 2024 Tim C. Lueth |
exp_2024_07_20_Frame85(,"STL")- Experiment to convert rotating movement into a translation movement |
 | % exp_2024_07_20_Frame85(,"STL") - Experiment to convert rotating movement into a translation movement % (by Tim Lueth, VLFL-Lib, 2024-JUL-20 as class: EXPERIMENTS) % % This design is for the 85 motor % The design that Tim Lueth invented for the servo motor already exists % in a very similar form under the name guide pot with detent disc from % the company Ganternorm. It can also be used with a spring element % between the detent discs for coupling if no magnet is used. % 80% infill instead of 15% just takes 5% more time. (Status of: % 2024-07-31) % % Introduced first in SolidGeometry 5.4 % % See also: exp_2024_07_25_mount, SGraamboTCPknurledgearcover, % SGraamboTCPMagnetM22 % % exp_2024_07_20_Frame85([,"STL"]) % "STL": if used an STL folder is written % % Additional Hyperlinks: % elesa, ganternorm % % See also: exp_2024_07_25_mount, SGraamboTCPknurledgearcover, % SGraamboTCPMagnetM22 % % % Copyright 2024 Tim C. Lueth |
SGclosurecapFDM(SG,CPLU,hh)- creates a top cover for FDM Printing |
 | % SGclosurecapFDM(SG,CPLU,hh) - creates a top cover for FDM Printing % (by Tim Lueth, VLFL-Lib, 2024-JUL-18 as class: AUTOMATIC DESIGN) % % For FDM printer it is difficult to create a plane ceiling without % support structure. Nevertheless, it is not always necessary to (Status % of: 2024-07-18) % % Introduced first in SolidGeometry 5.4 % % See also: SGclosurecapofFS % % [SGC,SGO,h]=SGclosurecapFDM(SG,[CPLU,hh]) % === INPUT PARAMETERS === % SG: Solid geometry to be closed at the top % CPLU: Optional CPL of an inlay; default is []; % hh: optonal [height and border] for an inlay; default is [0 1.2] % === OUTPUT RESULTS ====== % SGC: Solid Geometry of cap AddSG % SGO: Solid Geometry of post ADDplug % h: height of plug % % EXAMPLE: % SGDIN13(-20,10,'',PLcircle(12)); SG=ans; % SGclosurecapFDM(SG); SGC=ans; % SGclosurecapFDM(SG,PLcircle(4)); SGC=ans; % Opening of 8 mm % SGclosurecapFDM(SG,PLcircle(4),2); SGC=ans; % Inlay 8mm x 2mm % % See also: SGclosurecapofFS % % % Copyright 2024 Tim C. Lueth |
SGofFSCPLextrude(SG,dz,"OLAP","STL")- creates a solid be extrudsion of the feature surface selection |
 | % SGofFSCPLextrude(SG,dz,"OLAP","STL") - creates a solid be extrudsion of the feature surface selection % (by Tim Lueth, VLFL-Lib, 2024-JUL-17 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGofCPLzchamfer, FSselect % % [SGN,SGNN,CPL,T]=SGofFSCPLextrude(SG,[dz,"OLAP","STL"]) % === INPUT PARAMETERS === % SG: Solid Geometry % dz: elongation % "OLAP": if used with a value > 0 ; instead of the Feature Surface a cut % projektion (mm) is used % "STL": if used, an STL file is written % === OUTPUT RESULTS ====== % SGN: Extrusion s % SGNN: Final Solid % CPL: Used Contour % T: Transformation matrix % % EXAMPLE: % SGofCPLzchamfer(PLcircle([40 30]),10,2); SG=ans; % Solid with chamfered edges % SGofFSCPLextrude(SG,10,[0 0 1],'front',-3) % 10 mm extension to FS in [0 0 1] by FS extrusion % SGofFSCPLextrude(SG,10,[0 0 1],'front',-3,'olap',2) % 10 mm with 2mm overlap for chamfered edge % % See also: SGofCPLzchamfer, FSselect % % % Copyright 2024 Tim C. Lueth |
mfile2mlxfile4markup(fname,,"force")- Converts an Markup or publishable M file into an mlx live script |
 | % mfile2mlxfile4markup(fname,,"force") - Converts an Markup or publishable M file into an mlx live script % (by Tim Lueth, VLFL-Lib, 2024-JUL-16 as class: AUXILIARY PROCEDURES) % % The documentation database on Filemaker is able to create markup-scipts % for documentation puposes. Thodr m-file scipts can be automatically % transformed into mlx files and exported as html files for the the % documentation system of matlab. % Unoftunaltely at the current status (2024a) is is not possible to % create the graphical output by running the mlx script. therefor, this % fnctn is currently a 2 step fnctn. % 1) Call the fnctn mfile2mlxfile4markup to create the live script % 2) push MANNUALLY the run button. % 3) Call the fnctn mfile2mlxfile4markup again to create the html file % with output (Status of: 2024-07-16) % % Introduced first in SolidGeometry 5.4 % % See also: builddocsearchdb, SGcreate_helptoc_xml_File, % SGcreate_demos_xml_File % % mfile2mlxfile4markup(fname,[,"force"]) % === INPUT PARAMETERS === % fname: matlab m-file within the search path % "force": if used, the mlx file will be overwritten anyway % % EXAMPLE: % mfile2mlxfile4markup('testmtomlxconversion') % 1st call for creating the mlx file % mfile2mlxfile4markup('testmtomlxconversion') % 2nd call to create the html file % % See also: builddocsearchdb, SGcreate_helptoc_xml_File, % SGcreate_demos_xml_File % % % Copyright 2024 Tim C. Lueth |
stamp- creates a text line for publishable code with currenct OSX version | Matlab Version | SGlib version |
 | % stamp - creates a text line for publishable code with currenct OSX version | Matlab Version | SGlib version % (by Tim Lueth, VLFL-Lib, 2024-JUL-15 as class: AUXILIARY PROCEDURES) % % % use it as last line to mlx files or publishabe files (Status of: % 2024-08-04) % % Introduced first in SolidGeometry 5.4 % % See also: stamp, osx, verOSX, verML, verSG % % stamp % % EXAMPLE: % stamp % % See also: stamp, osx, verOSX, verML, verSG % % % Copyright 2024 Tim C. Lueth |
image2strbase64(fname,width)- creates an base64 string to integrate images direcdtly into html files |
 | % image2strbase64(fname,width) - creates an base64 string to integrate images direcdtly into html files % (by Tim Lueth, VLFL-Lib, 2024-JUL-14 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.4 % % See also: str2codelines, hexstr2str, hexstr2uint8, % hexstrtodoublebinvect, str2hexsstr, strdecoder, strencoder, % mfile2mlxfile4markup % % str=image2strbase64(fname,[width]) % === INPUT PARAMETERS === % fname: filename, weblink oder image array % width: desired with for rescale/resize % === OUTPUT RESULTS ====== % str: base64 string % % EXAMPLE: % image2strbase64("https://www.mec.ed.tum.de/fileadmin/w00cbp/mimed/Matlab_Toolboxes/SGPIC/SGPIC_4027.JPG",320) % call using an url to an image % image2strbase64("/Volumes/LUETH-WIN/WIN AIM Matlab Libraries/WIN AIM Matlab Datenbank Lueth PICS/SGPIC_3919.JPG") % call using a file % I=webread("https://www.mec.ed.tum.de/fileadmin/w00cbp/mimed/Matlab_Toolboxes/SGPIC/SGPIC_4027.JPG"); % image2strbase64(I,640) % call using an image % % See also: str2codelines, hexstr2str, hexstr2uint8, % hexstrtodoublebinvect, str2hexsstr, strdecoder, strencoder, % mfile2mlxfile4markup % % % Copyright 2024 Tim C. Lueth |
SGofT(T)- generates an infinitely small cube (1e-17) at T |
 | % SGofT(T) - generates an infinitely small cube (1e-17) at T % (by Tim Lueth, VLFL-Lib, 2024-JUL-12 as class: VISUALIZATION) % % makes life easier if Solids instead of frames are required (Status of: % 2024-07-12) % % Introduced first in SolidGeometry 5.4 % % See also: SGseedcube, zofBB % % SG=SGofT(T) % === INPUT PARAMETERS === % T: HT matrix 4x4 % === OUTPUT RESULTS ====== % SG: infinitely small cube (1e-17) at T % % EXAMPLE: % SGofT(eye(4)) % % See also: SGseedcube, zofBB % % % Copyright 2024 Tim C. Lueth |
CPLof2CPLzheuristic(CPLA,CPLB,z)- returns the projection of a solid the would be created by SGof2CPLzheurist |
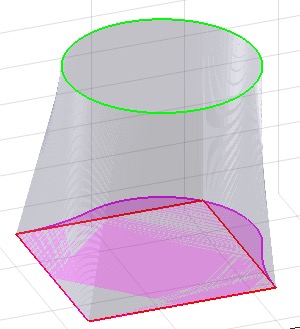 | % CPLof2CPLzheuristic(CPLA,CPLB,z) - returns the projection of a solid the would be created by SGof2CPLzheurist % (by Tim Lueth, VLFL-Lib, 2024-JUL-09 as class: CLOSED POLYGON LISTS) % % If a convex and a concave connotur are extruded in direction z to a % solid geometry, to larger contour could be replaced by the z-projection % of the final contour. This is the purpose of this fnctn (Status of: % 2024-07-10) % % Introduced first in SolidGeometry 5.4 % % See also: SGof2CPLzheurist, CPLofSGhull, CPLaddauxpoints, CPLunion % % CPL=CPLof2CPLzheuristic(CPLA,CPLB,z) % === INPUT PARAMETERS === % CPLA: Base Contour % CPLB: Top contour % z: extrusion height (has an effect) % === OUTPUT RESULTS ====== % CPL: proection contour % % EXAMPLE: % CPLof2CPLzheuristic(CPLofPL(PLsquare(100)),CPLofPL(PLcircle(50))+14,10); CPL=ans; % SGof2CPLzheurist(CPL,CPLofPL(PLcircle(50)+14,1),100); % Not enough points % SGof2CPLzheurist(CPLaddauxpoints(CPL,1),CPLaddauxpoints(CPLofPL(PLcircle(50))+14,1),100) % Desired % % See also: SGof2CPLzheurist, CPLofSGhull, CPLaddauxpoints, CPLunion % % % Copyright 2024 Tim C. Lueth |
hostname(datetag)- SAME AS USERNAME BUT CHANGED OUTPUT returns user name and host name using JAVA |
 | % hostname(datetag) - SAME AS USERNAME BUT CHANGED OUTPUT returns user name and host name using JAVA % (by Daniel Shub, VLFL-Lib, 2024-JUL-09 as class: AUXILIARY PROCEDURES) % % ..found in the internet..November 2018 (Status of: 2024-07-10) % % See also: expname, smbFilename, smbPSLibname, username % % [host,user]=hostname([datetag]) % === INPUT PARAMETERS === % datetag: % === OUTPUT RESULTS ====== % host: host name % user: user name % % EXAMPLE: % [,h]=hostname % % See also: expname, smbFilename, smbPSLibname, username % |
TofFSoutlinecenter(SG,fi,"debug")- returns the HT Matrix fo the center of the FS |
 | % TofFSoutlinecenter(SG,fi,"debug") - returns the HT Matrix fo the center of the FS % (by Tim Lueth, VLFL-Lib, 2024-JUL-06 as class: KINEMATICS AND FRAMES) % % In contrast to TofFS this fnctn is returning the center of the outline % econtour, which is useful if the FS has bore holes that move the mean % value of the vertices outside the real center (Status of: 2024-07-07) % % Introduced first in SolidGeometry 5.4 % % See also: FSselect, TofFS % % [T,CPLA,fi]=TofFSoutlinecenter(SG,[fi,"debug"]) % === INPUT PARAMETERS === % SG: SOlid Geometry % fi: list of indices ot list of features identical to FSselect % "debug": if used the ctreation is shown % === OUTPUT RESULTS ====== % T: Center frame of the surface % CPLA: Outer conotur in the eye(4) CS % fi: faces index list % % EXAMPLE: % SGmotorFeeTech; SGM=ans;SGM=SGrotate(SGM,'y',-pi/2); SGfigure(SGM) % TofFSoutlinecenter(SGM,[+1 0 0],'front',-100,'areadescend',1) % TofFSoutlinecenter(SGM,{[1 2]}) % TofFSoutlinecenter(SGM,[-1 0 0],'front',-100,'areadescend',1,'debug') % [T,CPLA]=TofFSoutlinecenter(SGM,[0 0 1],'front',-100,'areadescend'); SGfigure(SGM); CVLplot(VLtransT(CPLA,T),'b-',3); tplot(T,40); % [T,CPLA]=TofFSoutlinecenter(SGM,[0 0 -1],'front',-100,'areadescend'); SGfigure(SGM); CVLplot(VLtransT(CPLA,T),'b-',3); tplot(T,40); % [T,CPLA]=TofFSoutlinecenter(SGM,[0 0 -1],'front',-100,'areadescend'); SGfigure(SGM); CVLplot(VLtransT(CPLA,T),'b-',3); tplot(T,40); % % % See also: FSselect, TofFS % % % Copyright 2024 Tim C. Lueth |
SGcenterFS(SG,fi,"rot","debug")- directly centers the desired feature surface |
 | % SGcenterFS(SG,fi,"rot","debug") - directly centers the desired feature surface % (by Tim Lueth, VLFL-Lib, 2024-JUL-05 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 5.4 % % See also: FSselect, TofFS, TofFSoutlinecenter % % [SGN,T,fi]=SGcenterFS(SG,[fi,"rot","debug"]) % === INPUT PARAMETERS === % SG: Solid geomety % fi: cell list of facet index or % "rot": optional rotation angles % "debug": if used the debug fnctn will be activated % === OUTPUT RESULTS ====== % SGN: Solid with new center % T: Original coordinate frame of FS % fi: facet index of FS % % EXAMPLE: % SGmotorFeeTech; SGM=ans;SGM=SGrotate(SGM,'y',-pi/2); SGfigure(SGM) % [a,b,c]=SGcenterFS(SGM,{[1 2]},'rot',[0 pi/3 pi/10]); SGfigure(-30,30); SGplotalpha(a); SSS=SGtransT(SGM,inv(b)); SGplotalpha(SSS,'r',0.5); % % See also: FSselect, TofFS, TofFSoutlinecenter % % % Copyright 2024 Tim C. Lueth |
CPLremauxpoints(CPL,dist,glob)- removes points from a CPL or a PL that |
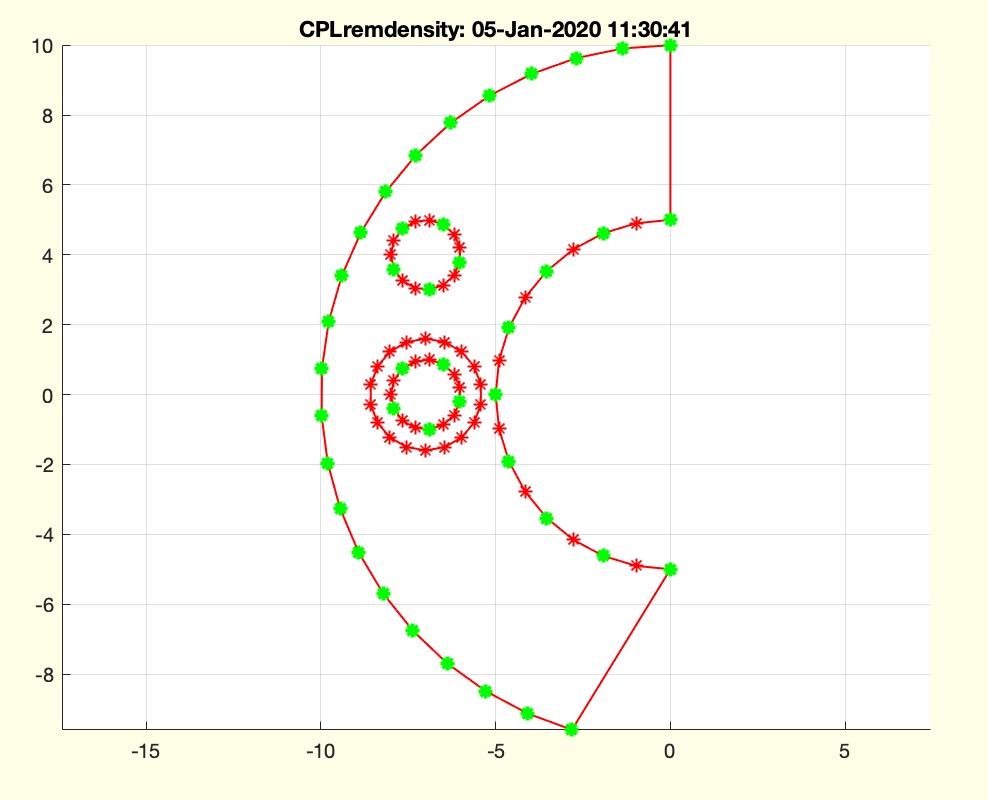 | % CPLremauxpoints(CPL,dist,glob) - removes points from a CPL or a PL that % (by Tim Lueth, VLFL-Lib, 2024-JUL-04 as class: CLOSED POLYGON LISTS) % % JUST A COPY OF CPLremdensity to find it using whichSG auxpoint (Status % of: 2024-07-07) % % Introduced first in SolidGeometry 5.4 % % See also: PLonCPLcontour, CPLremdensity, CPLremstraight, % CPLremstraightAmin % % PL=CPLremauxpoints(CPL,[dist,glob]) % === INPUT PARAMETERS === % CPL: CPL or PL % dist: minimal distance between original points % glob: if true; All points are considered as point cloud not as CPL % === OUTPUT RESULTS ====== % PL: CPL with minimal distances or PL in case of a cloud % % EXAMPLE: % CPLremdensity(CPLsample(29),1,true) % CPLremdensity(CPLsample(29),1) % CPLremdensity(CPLaddauxpoints(CPLsample(29),1),1) % % See also: PLonCPLcontour, CPLremdensity, CPLremstraight, % CPLremstraightAmin % % % Copyright 2024 Tim C. Lueth |
SGwheelspiral(R,H,n,A,shf,"DIN433","STL")- returns a solid of a involute spoked wheel which limit a torque jump or spike |
 | % SGwheelspiral(R,H,n,A,shf,"DIN433","STL") - returns a solid of a involute spoked wheel % (by Tim Lueth, VLFL-Lib, 2024-JUL-02 as class: PARAMETRIC DESIGN) % % This wheel should store overtorque energy in the involute spokes % will be improved by using a kerbkonus and a DIN 912 etc. % For a shaft slfit('t') is used for an axle slfit('c') is used (Status % of: 2024-07-02) % % Introduced first in SolidGeometry 5.4 % % See also: CPLofspokedPL, SGcylinder % % [SG,CPL]=SGwheelspiral([R,H,n,A,shf,"DIN433","STL"]) % === INPUT PARAMETERS === % R: [Ro Ro2 Ri]; default 15 % H: Heightand width of the spokes; default is [5 2] % n: number of spokes; if n<0 the spokes are ccw % A: 'T30' if there is a need for a torx axle; Can also be a CPL % shf: shaft==true [slfit('t')], axle=false [slfit('c')]; default is true % "DIN433": if used a pinring whaser of a DIN433 size is added % "STL": if used an STL file is written % === OUTPUT RESULTS ====== % SG: Solid Geometry % CPL: CPL that was extruded % % EXAMPLE: % SGwheelspiral(15,[3 2],3) % SGwheelspiral(15,[3 2],-3) % SGwheelspiral(15,[3 .8],-3,PLcircle(3),'DIN433') % SGwheelspiral(15,[3 2],3,'T30') % String for Torx % SGwheelspiral(20,'','',PLwrench(6.4,6),true, 'stl','DIN433'); % For shafts % SGwheelspiral(20,'','',PLwrench(6.4,6),false, 'stl','DIN433'); % For axes % % See also: CPLofspokedPL, SGcylinder % % % Copyright 2024 Tim C. Lueth |
SGmotorFeeTech- slow fnct that creates solids with text |
 | % SGmotorFeeTech - slow fnct that creates solids with text % (by Tim Lueth, VLFL-Lib, 2024-JUL-01 as class: PARAMETRIC DESIGN) % % It is still a miracle, why on Apple silicon the text subtract works % while on Apple intel subtraction of the text fails % It creates the SM120BL FeeTech as solid (Status of: 2024-07-07) % % Introduced first in SolidGeometry 5.4 % % See also: TofFSoutlinecenter, SGdesignrobotlink % % SG=SGmotorFeeTech % === OUTPUT RESULTS ====== % SG: SOlid Geometry of the Motor % % EXAMPLE: % SGmotorFeeTech; SGM=ans; % TofFSoutlinecenter(SGM,'debug',[1 0 0],'front',-100,'areadescend',1) % % See also: TofFSoutlinecenter, SGdesignrobotlink % % % Copyright 2024 Tim C. Lueth |
verSG- systematic names for versions - use osx for all |
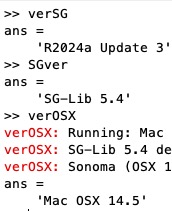 | % verSG - systematic names for versions - use osx for all % (by Tim Lueth, VLFL-Lib, 2024-JUN-26 as class: AUXILIARY PROCEDURES) % % % % verML returns Matlab version % % SGver returns SG-Lib Version % % verOSX returns OSX version (Status of: 2024-08-04) % % Introduced first in SolidGeometry 5.4 % % See also: stamp, osx, verosx, verML % % t=verSG % === OUTPUT RESULTS ====== % t: name of SG-Lib version % % EXAMPLE: % verSG, verML, verosx % % See also: stamp, osx, verosx, verML % % % Copyright 2024 Tim C. Lueth |
repmatfill(line,n,val)- fills an array with values or shortens the array |
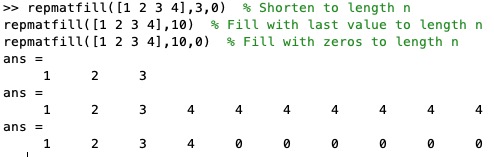 | % repmatfill(line,n,val) - fills an array with values or shortens the array % (by Tim Lueth, VLFL-Lib, 2024-JUN-25 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.4 % % See also: repmatfill % % line=repmatfill(line,n,[val]) % === INPUT PARAMETERS === % line: [1 x m] array with values % n: desired length % val: value for fill up; default is line (end) % === OUTPUT RESULTS ====== % line: resulting line with length n % % EXAMPLE: % repmatfill([1 2 3 4],3,0) % Shorten to length n % repmatfill([1 2 3 4],10) % Fill with last value to length n % repmatfill([1 2 3 4],10,0) % Fill with zeros to length n % % See also: repmatfill % % % Copyright 2024 Tim C. Lueth |
VLmostdistanceNeighborN(VL,dim)- return a list of n points ou of a points list that have the maximum distance sum |
 | % VLmostdistanceNeighborN(VL,dim) - return a list of n points ou of a points list that have the maximum distance sum % (by Tim Lueth, VLFL-Lib, 2024-JUN-21 as class: ANALYTICAL GEOMETRY) % % BE CAREFUL WITH THE LONG LIST become slow easily % Think about using CVLremstraightAmin first % MUST BE ONE CONTOUR, NOT A POINT CLOUD. BUGGY FOR POINTS CLOUDS SINCE % ORDER IS UNKNOWN % (Status of: 2024-06-23) % % Introduced first in SolidGeometry 5.4 % % See also: VLnearestNeighbor, VLnearestNeighborN, CVLremstraightAmin % % [nn,ll]=VLmostdistanceNeighborN(VL,[dim]) % === INPUT PARAMETERS === % VL: Vertex list % dim: number of points required % === OUTPUT RESULTS ====== % nn: full list of combiations % ll: full list of distances % % EXAMPLE: % VLmostdistanceNeighborN(CPLsample(3),4) % VLmostdistanceNeighborN(CPLsample(23),3); % VLmostdistanceNeighborN(CPLsample(41),3); %BUGGY FOR POINTS CLOUDS SINCE ORDER IS UNKNOWN % VLmostdistanceNeighborN(CPLsample(17),3); % VLmostdistanceNeighborN(CPLsample(17),4); % VLmostdistanceNeighborN(CPLsample(17),5); % % See also: VLnearestNeighbor, VLnearestNeighborN, CVLremstraightAmin % % % Copyright 2024 Tim C. Lueth |
CPLcontourslots(CPL,dlw,nsl)%createsslotalongacontour- creates slot contours to connect two solid by simple plug sockets |
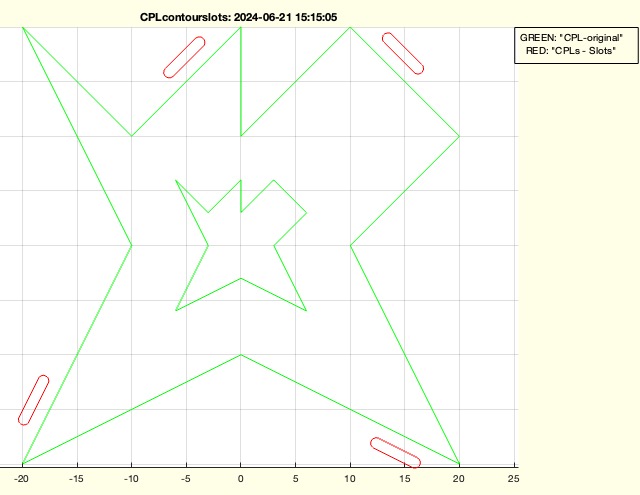 | % CPLcontourslots(CPL,dlw,nsl)%createsslotalongacontour - creates slot contours to connect two solid by simple plug sockets % (by Tim Lueth, VLFL-Lib, 2024-JUN-21 as class: CLOSED POLYGON LISTS) % % different solution wrt CPLradialslots (Status of: 2024-06-22) % % Introduced first in SolidGeometry 5.4 % % See also: CPLradialslots % % CPLN=CPLcontourslots([CPL,dlw,nsl])%createsslotalongacontour % === INPUT PARAMETERS === % CPL: Outer Contur % dlw: length width distance % nsl: number of slots % === OUTPUT RESULTS ====== % CPLN: Final slot contour % % EXAMPLE: % CPLcontourslots(CPLsample(3)*2,5,3) % CPLcontourslots(CPLsample(3)*2,5,4) % CPLcontourslots(CPLsample(3)*2,5,5) % CPLcontourslots(CPLsample(4)*2,5,4) % CPLcontourslots(CPLsample(6)*2,5,4) % CPLcontourslots(CPLsample(7)*2,5,4) % testfunctTL('CPLcontourslots(CPLsample(#1)*3,5,#2);',2:8,[3 4 10]); % % See also: CPLradialslots % % % Copyright 2024 Tim C. Lueth |
VLseparate(VL,rr,dim)- wish to solve boolean opeartion problems |
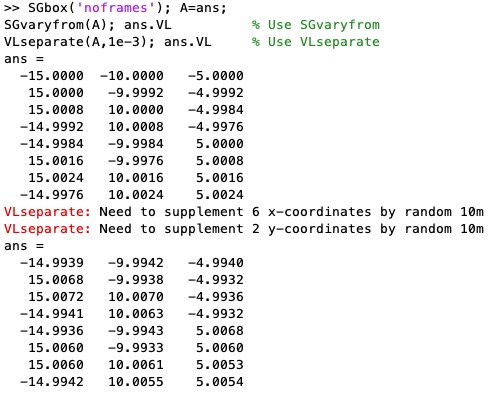 | % VLseparate(VL,rr,dim) - wish to solve boolean opeartion problems % (by Tim Lueth, VLFL-Lib, 2024-JUN-19 as class: ANALYTICAL GEOMETRY) % % again implemented VLvaryfrom (Status of: 2024-06-23) % % Introduced first in SolidGeometry 5.4 % % See also: VLELroundunique, VLof2VLnonmanifold, VLmindist, VLmindxyz, % VLvertexfusion, VLvaryfrom, PLvaryfrom, TLvaryfrom, SGvaryfrom % % VL=VLseparate([VL,rr,dim]) % === INPUT PARAMETERS === % VL: Vertex list % rr: random increasement % dim: default is [1 2 3] % === OUTPUT RESULTS ====== % VL: Vertex list with unique vertices % % EXAMPLE: % SGbox('noframes'); A=ans; % SGvaryfrom(A); ans.VL % Use SGvaryfrom % VLseparate(A,1e-3); ans.VL % Use VLseparate % % See also: VLELroundunique, VLof2VLnonmanifold, VLmindist, VLmindxyz, % VLvertexfusion, VLvaryfrom, PLvaryfrom, TLvaryfrom, SGvaryfrom % % % Copyright 2024 Tim C. Lueth |
SGstamptextFDM(SG,ez,txt,siz,"debug","relief")- creates an imprint or an relief if allowed |
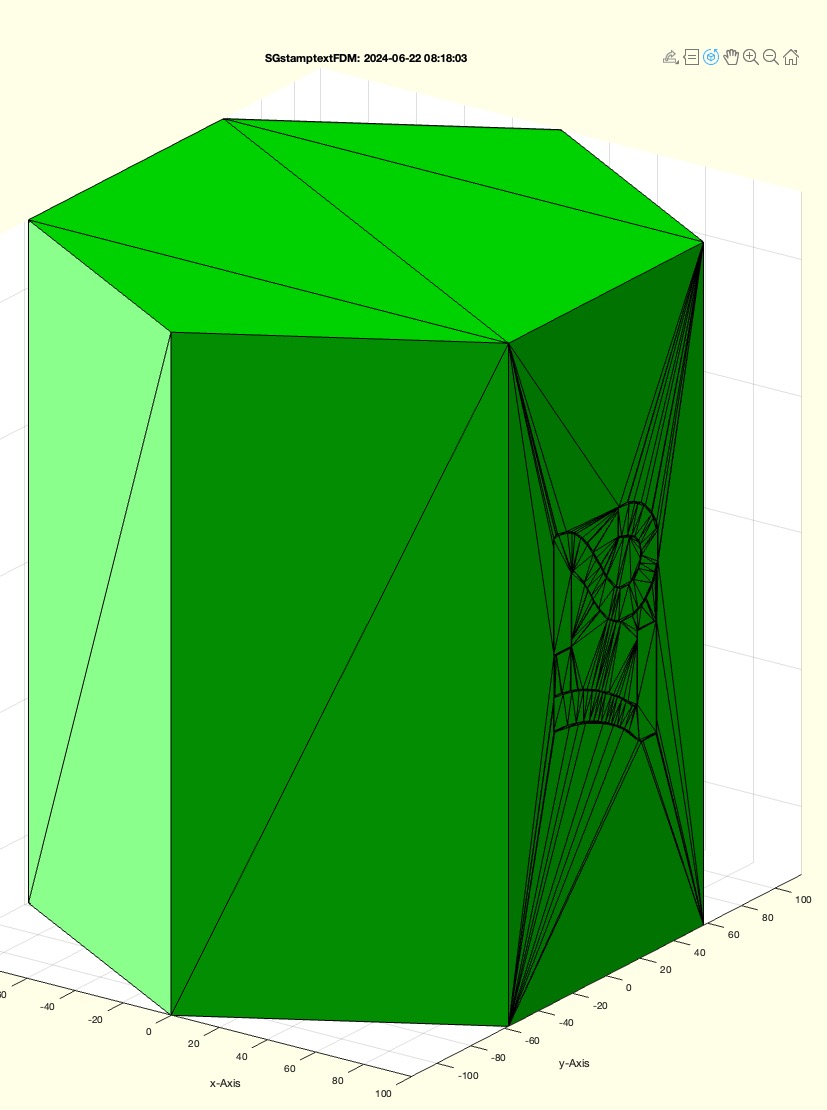 | % SGstamptextFDM(SG,ez,txt,siz,"debug","relief") - creates an imprint or an relief if allowed % (by Tim Lueth, VLFL-Lib, 2024-JUN-19 as class: AUTOMATIC DESIGN) % % more automatic fnctn than SGtextstamp, SGtextstamp2 (Status of: % 2024-06-22) % % Introduced first in SolidGeometry 5.4 % % See also: SGtextstamp, SGtextstamp2, SGgearstamp % % SG=SGstamptextFDM([SG,ez,txt,siz,"debug","relief"]) % === INPUT PARAMETERS === % SG: Solid Geometry % ez: surface direction of text % txt: text % siz: maximum size; default is 20 % "debug": if used, the design is shown % "relief": if used insted of an imprint also a relief is allowed % === OUTPUT RESULTS ====== % SG: Modified SG % % EXAMPLE: % SGstamptextFDM(SGbox([40 40 50]*5,10),[0 0 1],'27','debug') % SGstamptextFDM(SGbox([40 40 50]*5,10),[1 0 0],'27') % SGstamptextFDM(SGbox([40 40 50]),[0 -1 0],'27','debug') % % See also: SGtextstamp, SGtextstamp2, SGgearstamp % % % Copyright 2024 Tim C. Lueth |
SGdesignTongueGrooveRadial(CPLu,T,h,wi)- creates a radial tongue and groove connection for a contour or an opening in a 2.5D structure |
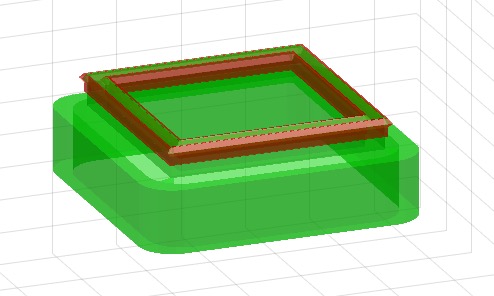 | % SGdesignTongueGrooveRadial(CPLu,T,h,wi) - creates a radial tongue and groove connection for a contour or an opening in a 2.5D structure % (by Tim Lueth, VLFL-Lib, 2024-JUN-17 as class: AUTOMATIC DESIGN) % % ONLY THE OUTPUT HAST TO BE DEFINED FOR FUTURE FNCTNS % THE SOLID IS BEHIND THE EZ Vector (Status of: 2024-06-22) % % Introduced first in SolidGeometry 5.4 % % See also: SGofCPLzgrow, exp_2024_06_16_CPLtonguegroove % % [Hsub,Nsub,S,Hadd,Nadd,T]=SGdesignTongueGrooveRadial([CPLu,T,h,wi]) % === INPUT PARAMETERS === % CPLu: Contour of an opening in a solid (CPLofFS) | OR a SG solid % T: Transformation of CPLu (CPLofFS); default is eye(4) | Or an ez % vector % h: [h-Upper h-Lower]; default os [3 5] % wi: [wall-inside wall-outside] default is [0.8 0] % === OUTPUT RESULTS ====== % Hsub: Subtraction solid % Nsub: not used yet % S: not used yet % Hadd: not used yet % Nadd: Lower Contour % T: Coordinate frame that has been used if ez was input parameter % % EXAMPLE: % SGofCPLz(PLcircle([20 24],4),5); SG=ans; % CPLofFS(SG,FSselect(SG,[0 0 -1],'front',-0.2)); % [CPL,T]=CPLofFS(SG,FSselect(SG,[0 0 -1],'front',-0.2)); % Take the floor lower surface % CPL=CPLselectinout(CPL,1); % Select the bore hole % SGdesignTongueGrooveRadial(CPL,T,[5 10],[0 5]) % % % See also: SGofCPLzgrow, exp_2024_06_16_CPLtonguegroove % % % Copyright 2024 Tim C. Lueth |
SGofCPLzgrow(CPL,zz,dr,"style")- creates solids with radial changing contours |
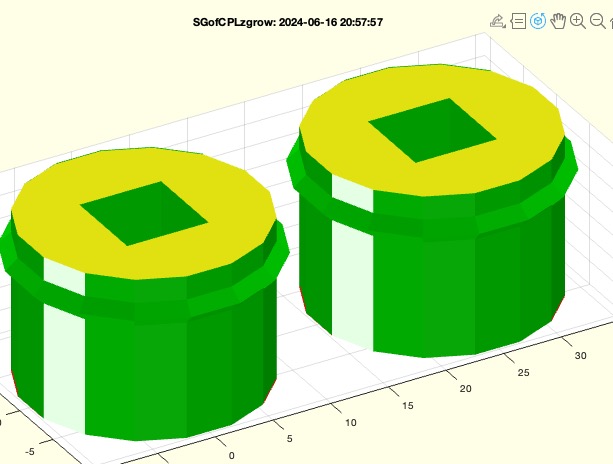 | % SGofCPLzgrow(CPL,zz,dr,"style") - creates solids with radial changing contours % (by Tim Lueth, VLFL-Lib, 2024-JUN-16 as class: SURFACES) % % used for circumferential tongue-and-groove fittings (Status of: % 2024-06-16) % % Introduced first in SolidGeometry 5.4 % % See also: CPLgrow, SGofCPLzgrid, CPLgrow, SGofCPL % % [SG,nva,FLW,FLU,FLO]=SGofCPLzgrow(CPL,[zz,dr,"style"]) % === INPUT PARAMETERS === % CPL: Closed Contour % zz: list of z values % dr: list of corresponding buffer/grow values for CPLgrow (not CPLbuffer) % "style": used in CPLgrow "norm","outw","hole", "fitt" default is 'hole' % === OUTPUT RESULTS ====== % SG: Solid Geometry % nva: list of points per z value % FLW: Faces of wall % FLU: Faces of floor % FLO: Faces of cover % % EXAMPLE: % SGofCPLzgrow(CPLsample(12),[0 10 11 12 13 14],[0 0 1 0]) % % See also: CPLgrow, SGofCPLzgrid, CPLgrow, SGofCPL % % % Copyright 2024 Tim C. Lueth |
exp_2024_06_16_CPLtonguegroove- EXPERIMENT THAT BECAME LATER SGdesignTongueGrooveRadial |
 | % exp_2024_06_16_CPLtonguegroove - EXPERIMENT THAT BECAME LATER SGdesignTongueGrooveRadial % (by Tim Lueth, VLFL-Lib, 2024-JUN-16 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 5.4 % % See also: SGdesignTongueGrooveRadial % % exp_2024_06_16_CPLtonguegroove % % EXAMPLE: % exp_2024_06_16_CPLtonguegroove % % See also: SGdesignTongueGrooveRadial % % % Copyright 2024 Tim C. Lueth |
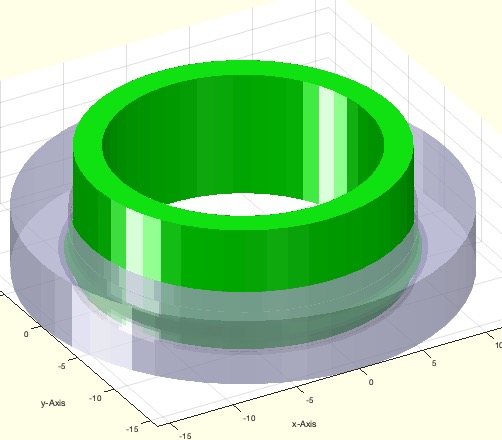
SGradialhooks(RRR,nmax)- Creates hooks for a rotating bayonet catch |
 | % SGradialhooks(RRR,nmax) - Creates hooks for a rotating bayonet catch % (by Tim Lueth, VLFL-Lib, 2024-JUN-15 as class: PARAMETRIC DESIGN) % % Slot of slfit('c') ==> loos, Slot of slfit('t') ==> tight % % The hooks need a width of 2mm and a height of at least 1.2mm % The slot should be widened sls, but the increase should only be slt. % It should be printed without a support structure so that the hooks % remain undamaged (Status of: 2024-06-16) % % Introduced first in SolidGeometry 5.4 % % See also: CPLradialslots % % [SGN,CPLh]=SGradialhooks([RRR,nmax]) % === INPUT PARAMETERS === % RRR: [Inner-Radius Length Slot-Height Hook-Height optional-tube] % default is [20 10 2 5 2 0] % nmax: maximum numbers of Hooks; default is 5 % === OUTPUT RESULTS ====== % SGN: Solid Geometry of Radial Hooks % CPLh: Exact contour without fittinhs % % EXAMPLE: % SGradialhooks([40 10 2 1 3 10],99) % allowed maximum of 99 reduced to 4 possible Hooks % SGradialhooks([40 10 2 1 3 10],5) % reduced to maximum of 3 % SGradialhooks([40 10 2 1 3 10],2) % reduced to maximum of 2 % % See also: CPLradialslots % % % Copyright 2024 Tim C. Lueth |
exp_2024_06_15_Hookplate- Bayonet catch with radial hooks |
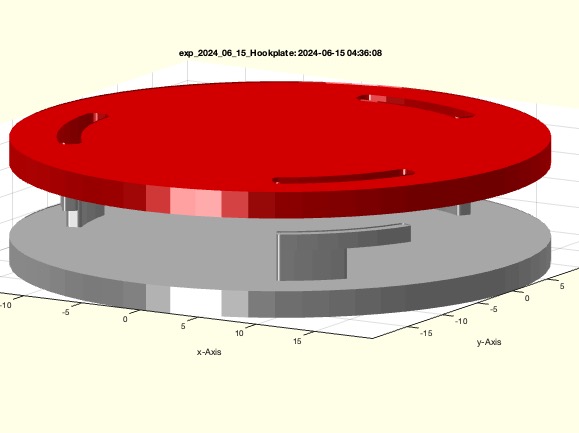 | % exp_2024_06_15_Hookplate - Bayonet catch with radial hooks % (by Tim Lueth, VLFL-Lib, 2024-JUN-15 as class: EXPERIMENTS) % % Tested using exp_2024_06_15_Hookplate (Status of: 2024-06-15) % % Introduced first in SolidGeometry 5.4 % % See also: SGradialhooks, CPLradialslots % % exp_2024_06_15_Hookplate % % EXAMPLE: % exp_2024_06_15_Hookplate % % % See also: SGradialhooks, CPLradialslots % % % Copyright 2024 Tim C. Lueth |
CPLradialslots(Riw,ls,nmax,off)- creates rotating circle segment contour for socket connectors |
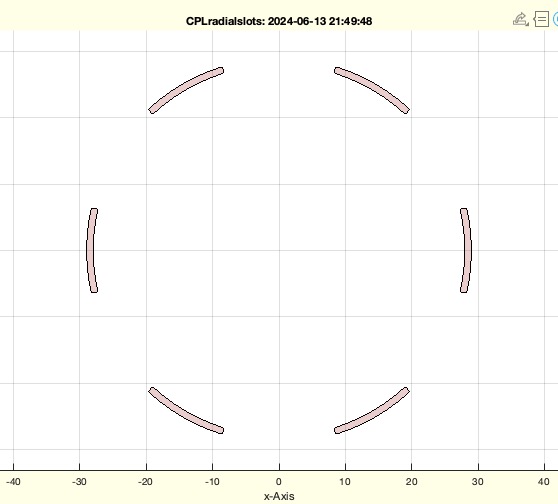 | % CPLradialslots(Riw,ls,nmax,off) - creates rotating circle segment contour for socket connectors % (by Tim Lueth, VLFL-Lib, 2024-JUN-13 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.4 % % See also: CPLcopyunionradial % % [CPLN,CPL,nn]=CPLradialslots([Riw,ls,nmax,off]) % === INPUT PARAMETERS === % Riw: [Ri Ro] % ls: length of the slot % nmax: maximum number of slots % off: offset angle % === OUTPUT RESULTS ====== % CPLN: Complete Conotur % CPL: 1st Segment % nn: % % EXAMPLE: % CPLradialslots([28 29],10,5),1) % % See also: CPLcopyunionradial % % % Copyright 2024 Tim C. Lueth |
SGofCPLzgrid(CPL,zz,dx,dy)- creates a Contour by extrusion using a z coordinate list |
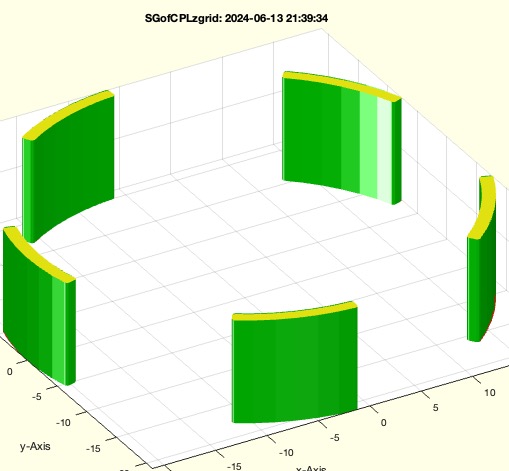 | % SGofCPLzgrid(CPL,zz,dx,dy) - creates a Contour by extrusion using a z coordinate list % (by Tim Lueth, VLFL-Lib, 2024-JUN-13 as class: SURFACES) % % Introduced first in SolidGeometry 5.4 % % See also: SGofCPLz, SGofCPLzgrow % % [SG,nva,FLW,FLU,FLO]=SGofCPLzgrid(CPL,[zz,dx,dy]) % === INPUT PARAMETERS === % CPL: Contour % zz: list of z values % dx: list of corresponding x deviation % dy: list of corresponding y deviation % === OUTPUT RESULTS ====== % SG: SOlid Geometry % nva: number of vertices per plane % FLW: Only the walls % FLU: Only the floor % FLO: Only the cover % % EXAMPLE: % SGofCPLzgrid(CPLsample(6),-3:1:10) % SGofCPLzgrid(CPLsample(6),0:1:10,0:6,0:6) % SGofCPLzgrid(PLcircle(3)+[10 0],0:10,10*cos(0:pi/3/10:pi/3),10*sin(0:pi/3/10:pi/3)) % SGofCPLzgrid(PLcircle(3),0:10,0,10*sin(0:pi/3/10:pi/3)) % SGofCPLzgrid(PLcircle(3),0:10,10*cos(0:pi/3/10:pi/3),0) % % SGofCPLzgrid(CPLradialslots(20,1.2)) % % See also: SGofCPLz, SGofCPLzgrow % % % Copyright 2024 Tim C. Lueth |
SGgearstamp(SG,zz)- Marks gear wheels with numbers or text |
 | % SGgearstamp(SG,zz) - Marks gear wheels with numbers or text % (by Tim Lueth, VLFL-Lib, 2024-JUN-12 as class: KINEMATICS AND FRAMES) % % When designing gearboxes, gears are produced with similar but different % numbers of teeth, which are difficult to distinguish by eye during % assembly. A marking with at least the position in the gear sequence is % helpful (Status of: 2024-06-12) % % Introduced first in SolidGeometry 5.4 % % See also: SGplotgears % % SG=SGgearstamp(SG,[zz]) % === INPUT PARAMETERS === % SG: Cell list of gear wheels without a number % zz: optional other text; not used yet % === OUTPUT RESULTS ====== % SG: Cell list of gears with engraved position within the gear sequence % % EXAMPLE: % zz=SGgearratio(15,3,[12 45]), [SG,m,f]=SGgearchainwindup(1,zz,'stack') % SGgearstamp(SG) % % % See also: SGplotgears % % % Copyright 2024 Tim C. Lueth |
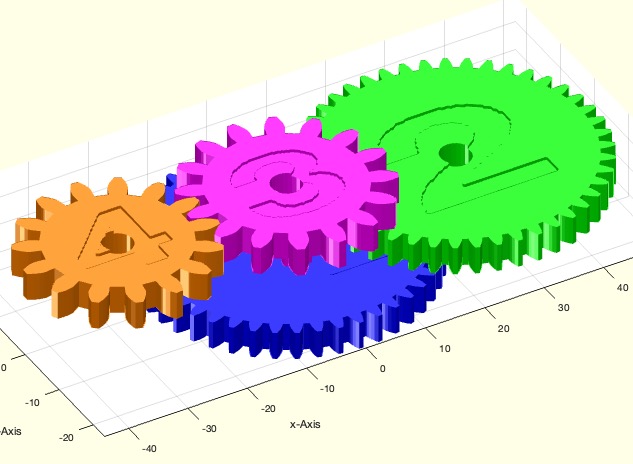
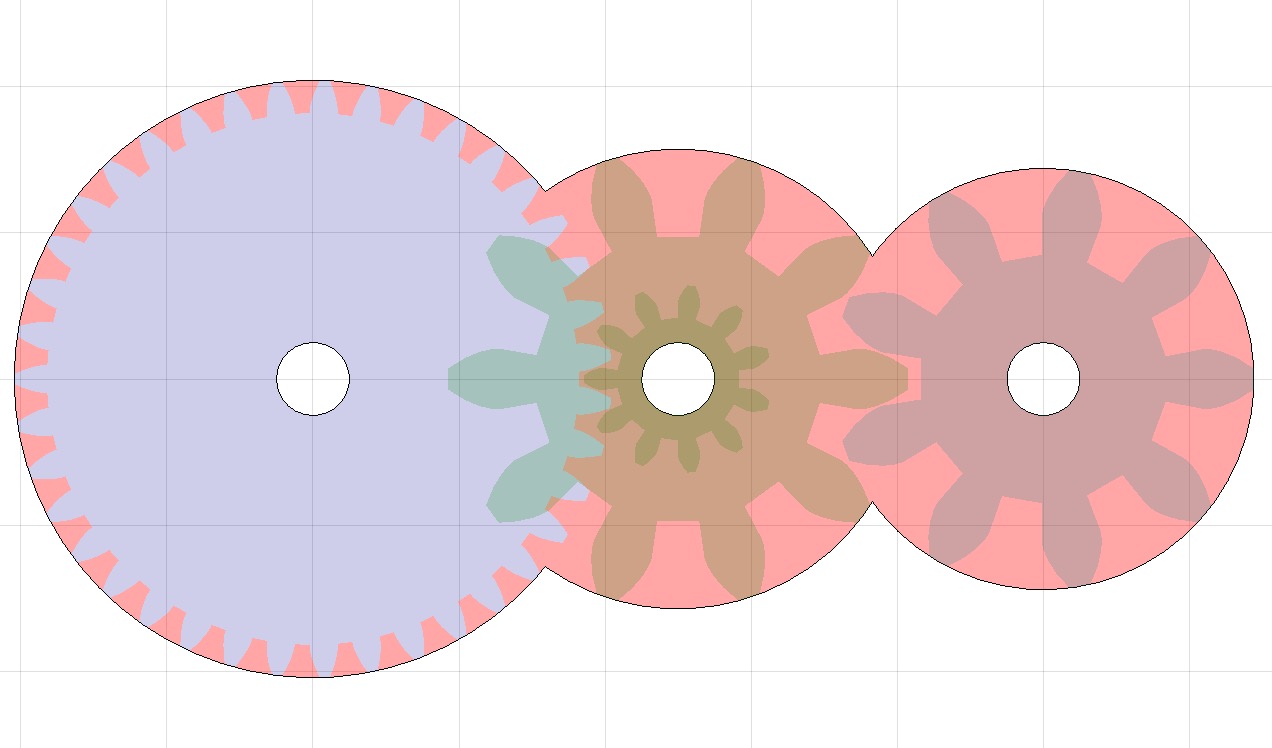
SGplotgears(SG,cols,al,f)- plot a gear i predefined colors from blue(1st) to orange (last) |
 | % SGplotgears(SG,cols,al,f) - plot a gear i predefined colors from blue(1st) to orange (last) % (by Tim Lueth, VLFL-Lib, 2024-JUN-11 as class: VISUALIZATION) % % The fnctn is different to SGplotcell (surfaces) or SGplotcellmultiple % (subplots) % The color % blue is used for the 1st wheel % orange is used for the last wheel % the colors algea, purple (Status of: 2024-06-12) % % Introduced first in SolidGeometry 5.4 % % See also: SGplotalpha, Videoquickanimatego, SGgearratio, % SGgearchainwindup % % h=SGplotgears(SG,[cols,al,f]) % === INPUT PARAMETERS === % SG: cell list of gear solids % cols: colorstring or color cells; default is 'bcgmo' % al: transparency default is 1 % f: gear ratio f calculated by SGgearchainwindup % === OUTPUT RESULTS ====== % h: handle as cell list to be used for Videoquickanimatego % % EXAMPLE: % zz=SGgearratio(15,3,[12 45]), [SG,m,f]=SGgearchainwindup(1,zz,'stack') % SGfigure(-30,30); SGplotgears(SG,'',0.9); % clear gears % SGfigure(-30,30); SGplotgears(SG,'',0.5,f); % using gear ration f => animation % % See also: SGplotalpha, Videoquickanimatego, SGgearratio, % SGgearchainwindup % % % Copyright 2024 Tim C. Lueth |
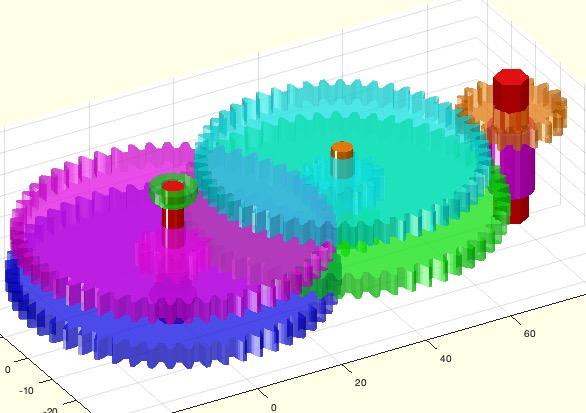
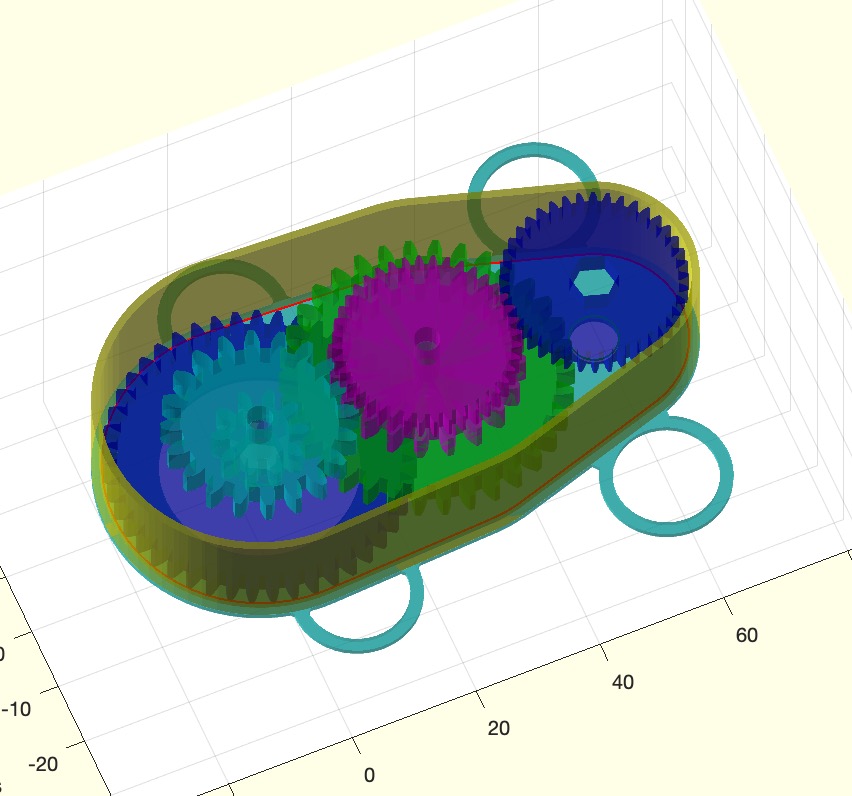
exp_2024_06_09_gearboxhousing(rat,dax,hh,AX,"STL","convex","freewheel")%Testincodeofmatlabtrip- creates a complete gear box including housing |
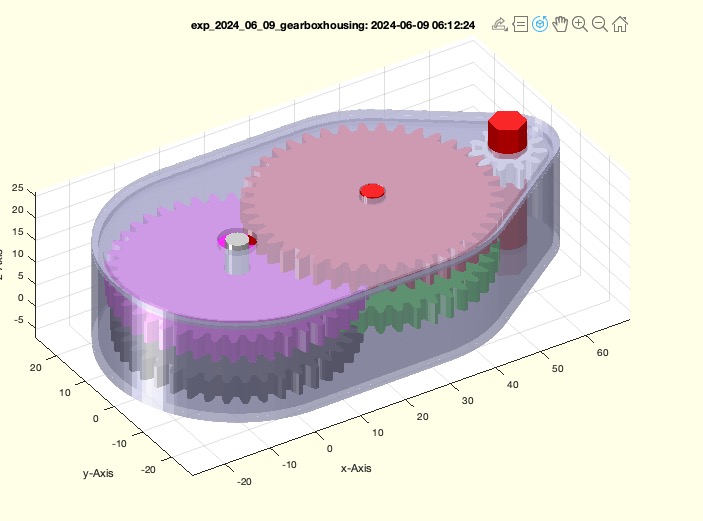 | % exp_2024_06_09_gearboxhousing(rat,dax,hh,AX,"STL","convex","freewheel")%Testincodeofmatlabtrip - creates a complete gear box including housing % (by Tim Lueth, VLFL-Lib, 2024-JUN-09 as class: EXPERIMENTS) % % This fnctn (currently an experiment) is used to generate the smallest % possible gearbox for an arbitrary transmission/reduction ratio. Either % with an exactly enclosing housing or with a convex enclosing housing. % No bearings are currently planned for the axle and the gears. The % diameter and shape of the axle and shaft can be selected. The axles are % prepared with a clearance fit and the shaft with an interference fit % (Status of: 2024-06-11) % % Introduced first in SolidGeometry 5.4 % % See also: SGgearratio, SGgearchainwindup, SGgearboxhousing, % SGwrenchsocketspanner, SGfreewheel % % SGall=exp_2024_06_09_gearboxhousing([rat,dax,hh,AX,"STL","convex","free % wheel"])%Testincodeofmatlabtrip % === INPUT PARAMETERS === % rat: gear ratio; default is 30 % dax: distance of the axes; default is 25 % hh: height of the gear wheels; default is 5 % AX: [shaft-wrench shaft-edges axis-diameter axis edges % "STL": if used the gear box ist written as STL directory % "convex": if used the gear box housing ist convex hull shaped % "freewheel": contains the parameter for a freewheel and replaces the % shaft by an axis for the 1st wheel % === OUTPUT RESULTS ====== % SGall: Cell array with all solids % % EXAMPLE: % exp_2024_06_09_gearboxhousing(145,30) % % See also: SGgearratio, SGgearchainwindup, SGgearboxhousing, % SGwrenchsocketspanner, SGfreewheel % % % Copyright 2024 Tim C. Lueth |
CPLunionsorted(A,B,sr)- For 2.5D Design in Mechanical Engineering, there is a different CPLunion requireed |
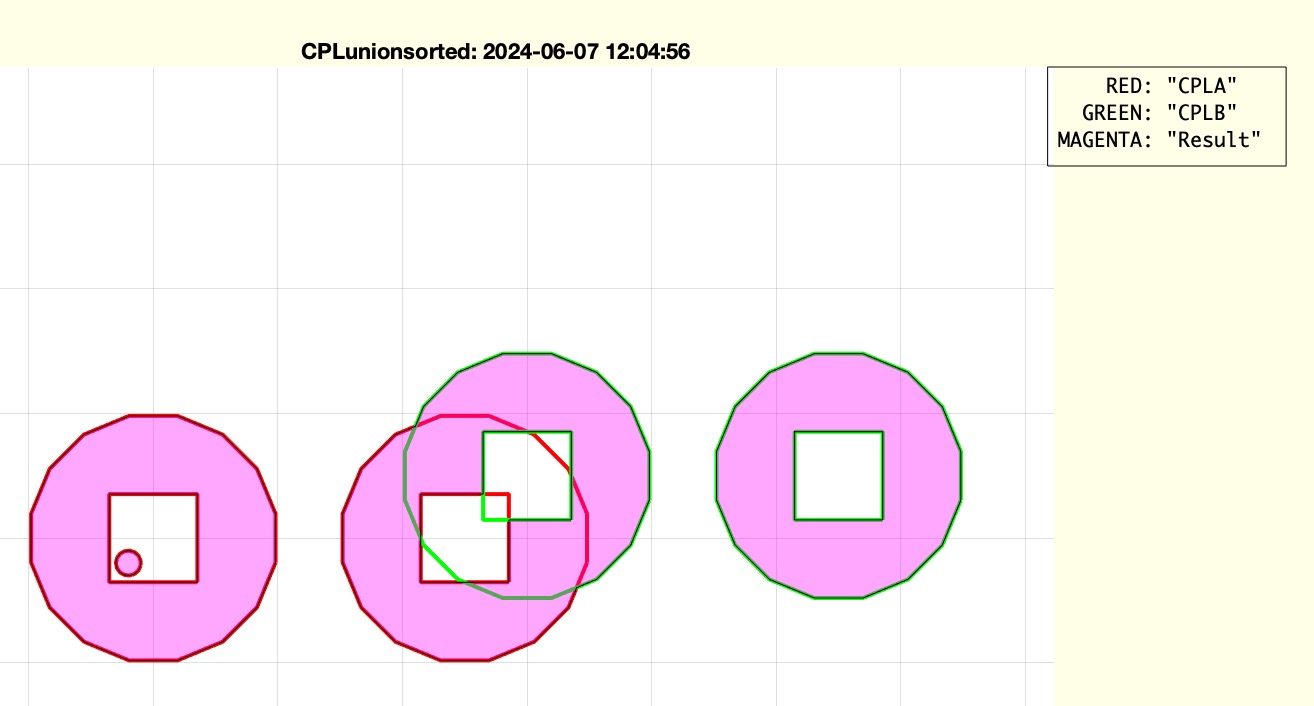 | % CPLunionsorted(A,B,sr) - For 2.5D Design in Mechanical Engineering, there is a different CPLunion requireed % (by Tim Lueth, VLFL-Lib, 2024-JUN-07 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.4 % % See also: CPLunion, CPLsubtract, CPLtransrelCPL, CPLofSGgears % % CPLU=CPLunionsorted(A,B,[sr]) % === INPUT PARAMETERS === % A: Contour A describing crossections % B: Contour B describing crossections % sr: spatial relation like for CPLtransrelCPL % === OUTPUT RESULTS ====== % CPLU: Final Contour with separated union and subtract % % EXAMPLE: % CPLunionsorted(CPLsample(27),CPLsample(12),'transx',30); % CPLunionsorted(CPLsample(27),CPLsample(12),'transx',30,'transy',5); % % See also: CPLunion, CPLsubtract, CPLtransrelCPL, CPLofSGgears % % % Copyright 2024 Tim C. Lueth |
SGgearboxhousing(SG,w,"convex","flooradd","floorsub")- creates a housing for a gear box |
 | % SGgearboxhousing(SG,w,"convex","flooradd","floorsub") - creates a housing for a gear box % (by Tim Lueth, VLFL-Lib, 2024-JUN-07 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGgearchainwindup, CPLofSGgears % % [SGB,CPLi,CPLo]=SGgearboxhousing(SG,[w,"convex","flooradd","floorsub"]) % === INPUT PARAMETERS === % SG: Cell array of gears created by SGgearchainwindup etc. % w: [wall floor cover lid] thickness; default is [1.2 1.2 1.2 0.8] % "convex": if used the shape is a convex hull % "flooradd": this contours are added to the floor in addition (freewheel) % "floorsub": this contours are subtracted from the floor in addition % (freewheel) % === OUTPUT RESULTS ====== % SGB: {Wall, Floor, Lid} % CPLi: Inner axes contour used for the housing % CPLo: Outer box contour used for the housing % % EXAMPLE: % SGgearchainwindup([1 5 2],[45 9 34 10 20 20 40 40 ],'stack','shaft',PLwrench(6.4,6)); SGC=ans; % SGgearboxhousing(SGC) % SGgearboxhousing(SGC,'convex') % SGgearboxhousing(SGC,[1.2 1 0 0], 'convex') % SGgearboxhousing(SGC,[1.2 1 0 0], 'convex','flooradd',CPLcopypatternPL(PLcircle([10,8])+[30 0],PLsquare(50)),'floorsub',PLcircle(15)) % % % See also: SGgearchainwindup, CPLofSGgears % % % Copyright 2024 Tim C. Lueth |
CPLofSGgears(SG)- provides the 2D envelope for a planar gearbox |
 | % CPLofSGgears(SG) - provides the 2D envelope for a planar gearbox % (by Tim Lueth, VLFL-Lib, 2024-JUN-07 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 5.4 % % See also: SGgearchainwindup, SGgearboxhousing, CPLunionsorted % % CPLN=CPLofSGgears(SG) % === INPUT PARAMETERS === % SG: Cell array of gears comming from SGgearchainwindup etc. % === OUTPUT RESULTS ====== % CPLN: Contour the is required for the housing and the axes bore % % EXAMPLE: % SGgearchainwindup('stack'); CPLofSGgears(ans); % % See also: SGgearchainwindup, SGgearboxhousing, CPLunionsorted % % % Copyright 2024 Tim C. Lueth |
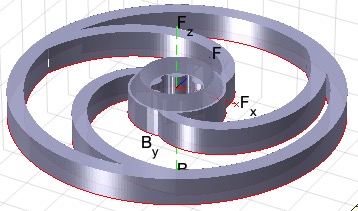
CPLspringSpiral(RP,d,D,CPLC,cc)- creates just the pathe and basic contour for a windup motor spring spiral |
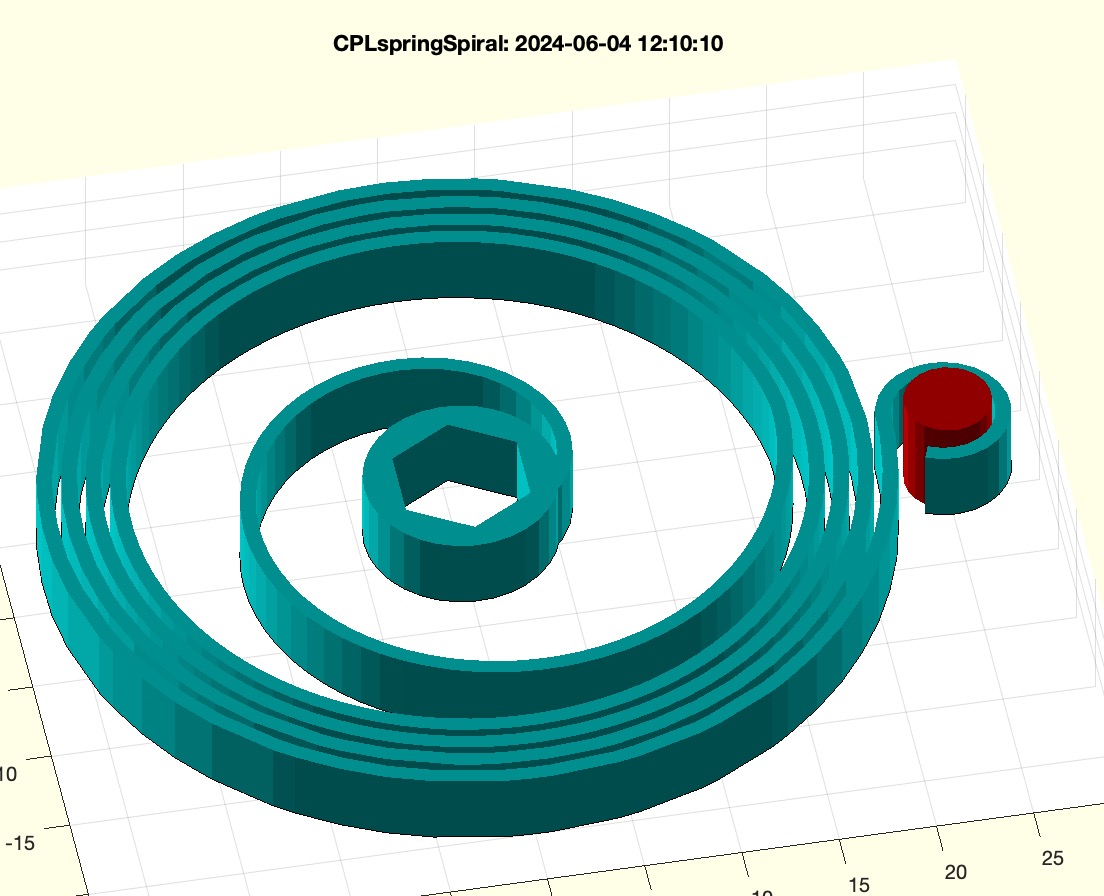 | % CPLspringSpiral(RP,d,D,CPLC,cc) - creates just the pathe and basic contour for a windup motor spring spiral % (by Tim Lueth, VLFL-Lib, 2024-JUN-04 as class: CLOSED POLYGON LISTS) % % ATTENTION - THIS IS NOT THE BEST SPRING LOAD VERSION! The best spring % is a simple spiral spring as an involute with a constant space between % the tracks as with a PLevolute. If such a spring is inserted into a % smaller housing already preloaded, the tracks are closer together on % the outside. The spring has a more constant torque output. However, as % a plastic spring shows material creep after just 24 hours, such a % spring will relax. It would make more sense to use a thicker involute % coil, perhaps with several arms. (See examples using SGspringSpiral) % % This fnctn create a spring contour that is different to a PLevolvente % spring. It looks more like a commercial feather steel spring (see % SGspringSpiralbolt). % This fnctn is used in SGspringSpiral (Status of: 2024-06-05) % % Introduced first in SolidGeometry 5.4 % % See also: PLevolvente, PLgrowline, SGspringSpiral, SGspringSpiralbolt % % [CPLN,PLN]=CPLspringSpiral([RP,d,D,CPLC,cc]) % === INPUT PARAMETERS === % RP: [radius distance]; default is [30 0]. Outer radius of the spring; % In case of D(1)>1 this is the distance to the axis % d: Thickness of the spring contour; default is 1.2 % D: Diameter and circular angle for the end; default is [0 1.7] % CPLC: Optinal middle contour to be integrated for shaft % cc: [Outer-spring-rounds Inner=Spring-Round; default is [2 3] % === OUTPUT RESULTS ====== % CPLN: Contour of the spring for SGofCPLz % PLN: Point list for the path % % EXAMPLE: % CPLspringSpiral(30,2); % 2mm spring contour 30mm % CPLspringSpiral(30,2,4); % 2mm spring contour for 4mm axis in 30mm % % CPLspringSpiral(30,2,4,[PLcircle(5);nan nan; PLwrench(6.4,6)]); % turn by a 1/4 inch shaft % CPLspringSpiral([30 40],2,4,[PLcircle(5);nan nan; PLwrench(6.4,6)]); % turn by a 1/4 inch shaft in 40mm % % SGspringSpiral('simple'); A=ans; SGrotate(A,'z',pi);B=ans % 2 arm spring coil % SGspringSpiral('simple'); A=ans; SGrotate(A,'z',2*pi/3);B=ans; SGrotate(B,'z',2*pi/3); C=ans; SGplotalpha(A); % 3 arm coil % % See also: PLevolvente, PLgrowline, SGspringSpiral, SGspringSpiralbolt % % % Copyright 2024 Tim C. Lueth |
SGshaftaxis(LENS,CPLS,"rad")- creates shaft axis combinations |
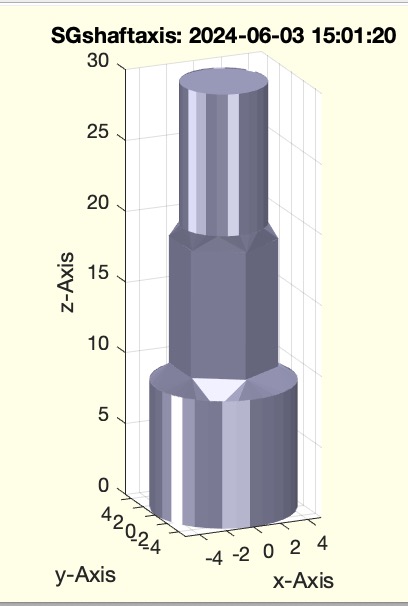 | % SGshaftaxis(LENS,CPLS,"rad") - creates shaft axis combinations % (by Tim Lueth, VLFL-Lib, 2024-JUN-03 as class: PARAMETRIC DESIGN) % % Tim Lueth, written in the home office of Greg Hager, Springfield, VA % (Status of: 2024-06-03) % % Introduced first in SolidGeometry 5.4 % % See also: SGfreewheel, SGgearchainwindup % % SGL=SGshaftaxis([LENS,CPLS,"rad"]) % === INPUT PARAMETERS === % LENS: cell array of length and transition such as {[10 1],[10 1],[10 1]} % CPLS: cell array of contours such as{5,PLwrench(6.4,6),3) % "rad": if rad is used, not the conturs but circle contours are fused % === OUTPUT RESULTS ====== % SGL: Final Shaft-Axis solid % % EXAMPLE: % SGshaftaxis({10 10 10},{PLcircle(5),PLwrench(6.4,6),PLcircle(3)}) % % See also: SGfreewheel, SGgearchainwindup % % % Copyright 2024 Tim C. Lueth |
dircrd()- same as dir but returns the creation date instead of the modification date |
 | % dircrd() - same as dir but returns the creation date instead of the modification date % (by Tim Lueth, VLFL-Lib, 2024-JUN-02 as class: FILE HANDLING) % % Too slow for practical use (Status of: 2024-06-02) % % Introduced first in SolidGeometry 5.4 % % See also: dir, ls, fcreationdate % % xx=dircrd([]) % === OUTPUT RESULTS ====== % xx: result if dir % % EXAMPLE: % dir db*.m % dircrd db*.m % ans.date % % See also: dir, ls, fcreationdate % % % Copyright 2024 Tim C. Lueth |
SGcylhinge(R,L,P,"STL")- Creates a piano hinge as a joint |
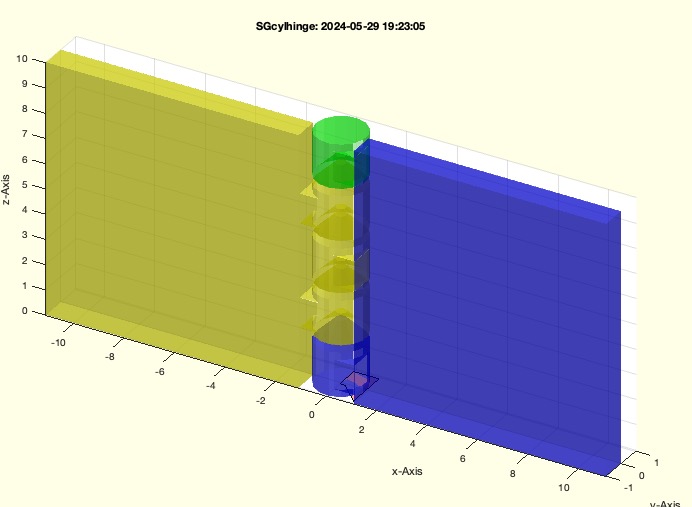 | % SGcylhinge(R,L,P,"STL") - Creates a piano hinge as a joint % (by Tim Lueth, VLFL-Lib, 2024-MAI-28 as class: AUTOMATIC DESIGN) % % Tested on bambulab X1C in May 2024 with R=1.5 and R=1 and R=0.8 % The current fnctn supports 1.5mm and 1.2mm but not yet 1 mm or 0.8mm % Radius < 1mm require an automatic change of the angle. % The nozzel ist still most 0.4mm. 0.6~D=1.2 mm are just 3 layers % ===================== % Diese Funktion und auch das Konzept von Drehgelenken ist sehr mächtig, % aber ohne Beispiele nur sehr schwer verständlich, da die Scharniere % verspannt werden müssen. % (Status of: 2024-05-30) % % Introduced first in SolidGeometry 5.4 % % See also: SGsimpleHinge, SGbladeofpincone, SGpincountersink % % SGall=SGcylhinge([R,L,P,"STL"]) % === INPUT PARAMETERS === % R: [Radius height-of-pin angle-of-pin]; default is [2 1.5 pi/4] % L: Length of the hinge; default is 40 % P: [plate-width plate-height bridge-size; default is [10 0 0.1]; % "STL": if used an STL file is written % === OUTPUT RESULTS ====== % SGall: All Parts % % EXAMPLE: % SGcylhinge(1,30,'stl') % % See also: SGsimpleHinge, SGbladeofpincone, SGpincountersink % % % Copyright 2024 Tim C. Lueth |
SGrackofSGshaftaxis(SGC,h,zz)- design automatically racks for rotating shafts and axis |
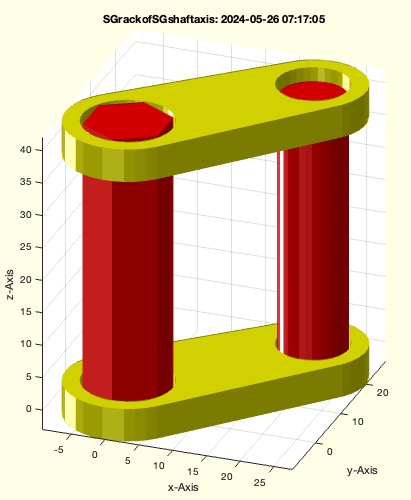 | % SGrackofSGshaftaxis(SGC,h,zz) - design automatically racks for rotating shafts and axis % (by Tim Lueth, VLFL-Lib, 2024-MAI-25 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: circlearoundPL, CPLofSGprojection, CPLoutercontour, % SGrackbars, CPLrack4PL, CPLrackPLdelaunay % % [SGS,CPLR]=SGrackofSGshaftaxis(SGC,[h,zz]) % === INPUT PARAMETERS === % SGC: cell list of shafts/axis in z direction % h: desired height and width of rack % zz: list of z values for the racks; default is [-inf inf] % === OUTPUT RESULTS ====== % SGS: cell array of racks % CPLR: cell array of rack contours % % EXAMPLE: % SGofCPLz(PLcircle(5)+[20 20],40); A=ans; % SGofCPLz(PLcircle(6.4,6)+[0 0],[-3 42]); B=ans; % SGrackofSGshaftaxis({A,B}) % SGrackofSGshaftaxis({A,B},[5 30]) % % See also: circlearoundPL, CPLofSGprojection, CPLoutercontour, % SGrackbars, CPLrack4PL, CPLrackPLdelaunay % % % Copyright 2024 Tim C. Lueth |
toggleviewprojection- toggle view projection between "orthographic" and "perspective" |
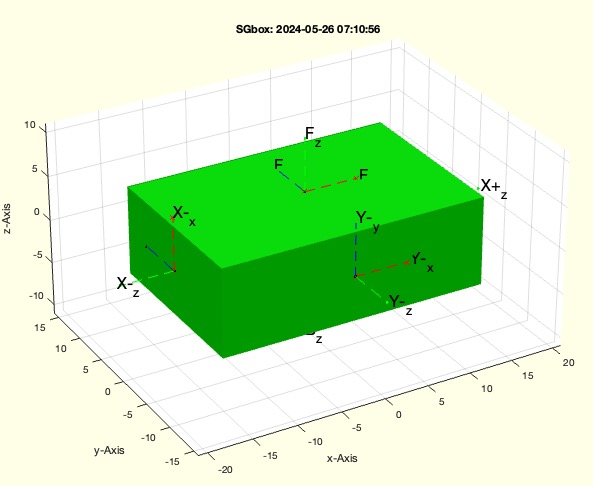 | % toggleviewprojection - toggle view projection between "orthographic" and "perspective" % (by Tim Lueth, VLFL-Lib, 2024-MAI-22 as class: VISUALIZATION) % % During design of technical components the orthographic makes more sense % for view(0,0), view(0,90) etc. (Status of: 2024-05-26) % % Introduced first in SolidGeometry 5.4 % % See also: app_2012_11_09, view % % toggleviewprojection % % EXAMPLE: % SGbox % toggleviewprojection % toggleviewprojection % % See also: app_2012_11_09, view % % % Copyright 2024 Tim C. Lueth |
SGspringSpiralbolt(Db,FA,LA,HS,"STL","ccw")- creates the shaft-axis combination for a commercial windup motor spring (80% fillin) |
 | % SGspringSpiralbolt(Db,FA,LA,HS,"STL","ccw") - creates the shaft-axis combination for a commercial windup motor spring (80% fillin) % (by Tim Lueth, VLFL-Lib, 2024-MAI-19 as class: PARAMETRIC DESIGN) % % Really usefull with 80% fillin. Ugly code for an commercial coil spring % but very powerful for windup motors with free wheel. In general it is % possible to print also a coil spring using SGspringSpiral. Nevertheless % a commercial coil spring from spring steel (60Si2Mn) is much better. % Try also ">> productcode spring" % In case of overload at 80% infill the slot works like a spring and will % let the socket wrench jump. In case of 20% infill the bold will be % destroyed (Status of: 2024-06-13) % % Introduced first in SolidGeometry 5.4 % % See also: SGmotorwindup, SGfreewheel, SGspringSpiral, productcode, % CPLspringSpiral % % [SGall,CPLN,CPLB,CPLS,CPLA]=SGspringSpiralbolt([Db,FA,LA,HS,"STL","ccw" % ]) % === INPUT PARAMETERS === % Db: [center height strength; default is [12 6 0.7] % FA: [Wrench size; edges; axis diameter edges]; default is [6.4 6 4.5 0] % LA: shaft-below-spring shaft-above-spring axis above upper shaft]; % default is 10 5 25] % HS: [x-size y-size hook-size distance hook-to center; default is [41 37 % 6 19]] for 35mm coil % "STL": if used, the bolt is written as STL file % "ccw": if used the housing is for ccw spring loading % === OUTPUT RESULTS ====== % SGall: {Bolt Housing Spring} print bolt with 80% infill % CPLN: Inner Contour of Housing % CPLB: Contour of Bolt to fix the hook % CPLS: Contour of shaft to remove % CPLA: contour of axis to remove % % Additional Hyperlinks: % Windup motor spring 35 x 6 x 0,7 mm, Windup motor spring 54 x 8 x 0.8 mm, Windup motor spring 40 x 8 x 0.8 mm % % EXAMPLE: % productcode spring % SGspringSpiralbolt([12 6 0.7],'',[10 5 25],'stl') % % See also: SGmotorwindup, SGfreewheel, SGspringSpiral, productcode, % CPLspringSpiral % % % Copyright 2024 Tim C. Lueth |
SGblockundertable(LBH,"STL")- Simply a block when tables wobble on uneven surfaces |
 | % SGblockundertable(LBH,"STL") - Simply a block when tables wobble on uneven surfaces % (by Tim Lueth, VLFL-Lib, 2024-MAI-19 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGcompass, SGboxMacmini, SGBAUHAUSdeskcylinder, SGBAUHAUSbox, % SGjuicermachineclip, SGwebcamcover % % SGblockundertable([LBH,"STL"]) % === INPUT PARAMETERS === % LBH: [length width height wall-thickness height-x height-y; default is % [40 25 4.5 2.4 10 2] % "STL": if used, and STL file is written % % EXAMPLE: % SGblockundertable % % See also: SGcompass, SGboxMacmini, SGBAUHAUSdeskcylinder, SGBAUHAUSbox, % SGjuicermachineclip, SGwebcamcover % % % Copyright 2024 Tim C. Lueth |
SGgearchainstraight(SG,f)- brings all the axes of a gear chain in a straight line |
 | % SGgearchainstraight(SG,f) - brings all the axes of a gear chain in a straight line % (by Tim Lueth, VLFL-Lib, 2024-MAI-17 as class: KINEMATICS AND FRAMES) % % Opposite of SGgearchainrotate % written during ICRA 2024 Yokohama (Status of: 2024-05-17) % % Introduced first in SolidGeometry 5.4 % % See also: SGgearchain, SGgearchainwindup, SGgearchainrotate % % SG=SGgearchainstraight(SG,f) % === INPUT PARAMETERS === % SG: Cell list of gear wheel with base frames 'B' % f: array of gear ration with respect to the 1st one f(1)==1 % === OUTPUT RESULTS ====== % SG: cell array of gears with modified position and rotation % % EXAMPLE: % SGgearchain(1,[9 13 17 21],'',0); [SG,TL,f,SGR]=SGgearchain(1,[9 13 17 21],'','',0); % a gear chain % SGgearchainrotate(SG,f,[pi/2]); SHN=ans; % SGgearchainstraight(SGN,f) % % See also: SGgearchain, SGgearchainwindup, SGgearchainrotate % % % Copyright 2024 Tim C. Lueth |
SGgearchainrotate(SG,f,W,SGA)- rotates the axes of a gear chain |
 | % SGgearchainrotate(SG,f,W,SGA) - rotates the axes of a gear chain % (by Tim Lueth, VLFL-Lib, 2024-MAI-17 as class: KINEMATICS AND FRAMES) % % The challange ist to turn the center of the wheels with the rotation of % each predecessor axis rotation which will lead to a consequent % rotatation of the following wheels to. % written during ICRA 2024 Yokohama (Status of: 2024-05-18) % % Introduced first in SolidGeometry 5.4 % % See also: SGgearchain, SGgearchainwindup, SGgearchainstraight % % [SG,SGA]=SGgearchainrotate(SG,f,W,[SGA]) % === INPUT PARAMETERS === % SG: Cell list of gear wheel with base frames 'B' % f: array of gear ration with respect to the 1st one f(1)==1 % W: array of desired rotatation of the following axis % SGA: cell array of correspponding wahser or axes to be moved with the % gears % === OUTPUT RESULTS ====== % SG: cell array of gears with modified position and rotation % SGA: cell array of correspponding wahser or axes % % EXAMPLE: % SGgearchain(1,[9 13 17 21],'',0); [SG,TL,f,SGR]=SGgearchain(1,[9 13 17 21],'','',0); % a gear chain % SGgearchainrotate(SG,f,[pi/2]); SHN=ans; % SGgearchainstraight(SGN,f) % % [SG,m,f,SGW]=SGgearchainwindup(1,[39 11 39 11 39 11],'stack'); view(0,0) % SGgearchainrotate(SG,f,[pi/6],SGW) % % See also: SGgearchain, SGgearchainwindup, SGgearchainstraight % % % Copyright 2024 Tim C. Lueth |
SGgearchainwindup(mhr,z,"stack","shaft","debug","anime","backlash")- returns a gear chain for a windup motor or a minimal size gear box - use SGgearstamp afterwards |
 | % SGgearchainwindup(mhr,z,"stack","shaft","debug","anime","backlash") - returns a gear chain for a windup motor or a minimal size gear box - use SGgearstamp afterwards % (by Tim Lueth, VLFL-Lib, 2024-MAI-12 as class: KINEMATICS AND FRAMES) % % ..written in the plane to Yokohama (ICRA 2024) and during the ICRA 2024 % In contrast to SGgearchain, this fnctn has been reimplemented, % especially to windup motors or the use of only two fixed axis, which % could require the adjustment of the gear module in each gear pairing. % % module % height of gear % radius of axle == ATTENTION THERE IS THIS RADIUS AND "SHAFT" is % ONLY FOR Gear #1 % height of rack % (Status of: 2024-06-12) % % Introduced first in SolidGeometry 5.4 % % See also: SGgearratio, CPLrack4PL, SGgearDINrot, SGgearchain, % SGgearchainrotate, SGgearchainstraight, SGspringSpiralbolt, % SGplotgears, SGgearstamp % % [SG,m,f,SGW,CPLW]=SGgearchainwindup([mhr,z,"stack","shaft","debug","ani % me","backlash"]) % === INPUT PARAMETERS === % mhr: [m h r hr] of gear; default is [1 5 1.25 0] % z: array of number of teeth % "stack": if used the gears will be stacked as desired % "shaft": if used this radius or CPL will be used for 1st and last % "debug": if used the design will me shown % "anime": if used the gearbox will be animated % "backlash": if used the module is reduced to achieve a slot with the % given value % === OUTPUT RESULTS ====== % SG: cell list of gears % m: array of modules used % f: ratio factor of the gears % SGW: cell list of washer or spacer for the gears in SG % CPLW: Contour of the shaft spacer SGW % % EXAMPLE: % SGgearchainwindup([1 5],[45 9 34 10]); % Linear Chain % SGgearchainwindup([1 5],[45 9 34 10],'stack'); % Gear Box % % [SG,m,f,SGW]=SGgearchainwindup(1,[39 11 39 11 39 11],'stack'); view(0,0) % SGgearchainrotate(SG,f,[pi/6],SGW) % % SGW=SGW(~isemptycell(SGW)) % % See also: SGgearratio, CPLrack4PL, SGgearDINrot, SGgearchain, % SGgearchainrotate, SGgearchainstraight, SGspringSpiralbolt, % SGplotgears, SGgearstamp % % % Copyright 2024 Tim C. Lueth |
plotannotationtext(NAME,VALU)- create quick an efficient text to be used in combination with plotannotation |
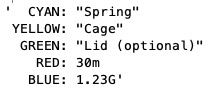 | % plotannotationtext(NAME,VALU) - create quick an efficient text to be used in combination with plotannotation % (by Tim Lueth, VLFL-Lib, 2024-MAI-08 as class: AUXILIARY PROCEDURES) % % annotating figures should be used more efficiently (Status of: % 2024-06-11) % % Introduced first in SolidGeometry 5.4 % % See also: plotannotation, plotannotatecolors, plotannotationdelete, % plotannotationtopleft % % txt=plotannotationtext([NAME,VALU]) % === INPUT PARAMETERS === % NAME: 1st and each second are the names of variables % VALU: 2nd and each second are values of variables % === OUTPUT RESULTS ====== % txt: char array % % EXAMPLE: % plotannotationtext('CYAN','Spring','YELLOW','Cage','GREEN','Lid (optional)','RED',0.03,'BLUE',1.23e9) % txt=ans; % figure; plotannotation(txt); % % See also: plotannotation, plotannotatecolors, plotannotationdelete, % plotannotationtopleft % % % Copyright 2024 Tim C. Lueth |
CPLcopyunionradial(CPL,ofs,n)- creates radial copies and unifies |
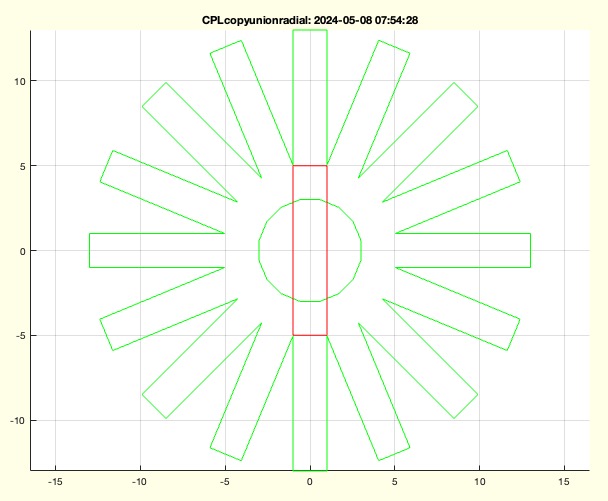 | % CPLcopyunionradial(CPL,ofs,n) - creates radial copies and unifies % (by Tim Lueth, VLFL-Lib, 2024-MAI-08 as class: CLOSED POLYGON LISTS) % % Does rotate the contour (Status of: 2024-05-08) % % Introduced first in SolidGeometry 5.4 % % See also: CPLcopypattern, CPLcopypatternPL, CPLcopyradial % % CPLN=CPLcopyunionradial([CPL,ofs,n]) % === INPUT PARAMETERS === % CPL: Contour to copy; default is PLsquare (2 10) % ofs: Radius; offset in [x and y] default is [0 8] % n: radius segments; default is 16 % === OUTPUT RESULTS ====== % CPLN: Final contour % % EXAMPLE: % CPLcopyunionradial(PLsquare([2 10]),[0 8],16) % CPLcopyunionradial(PLsquare([2 10]),[3 8],16) % % See also: CPLcopypattern, CPLcopypatternPL, CPLcopyradial % % % Copyright 2024 Tim C. Lueth |
PLwedgeoncircle(R,h,w)- Design a wedge for a circular movement |
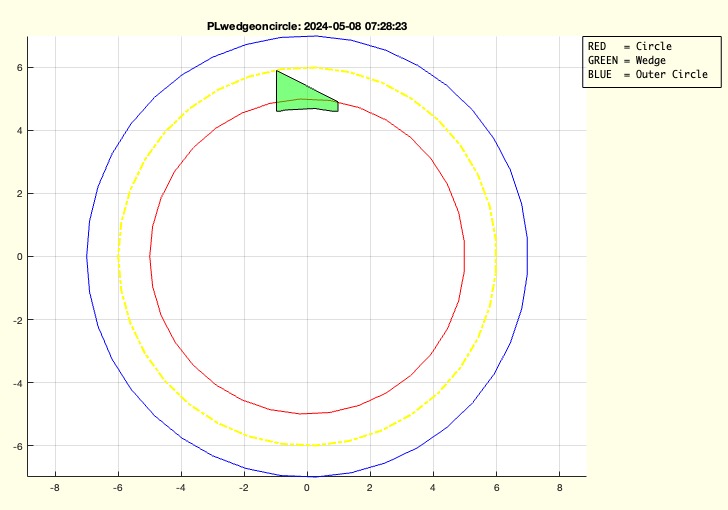 | % PLwedgeoncircle(R,h,w) - Design a wedge for a circular movement % (by Tim Lueth, VLFL-Lib, 2024-MAI-08 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.4 % % See also: SGfreewheel % % PL=PLwedgeoncircle([R,h,w]) % === INPUT PARAMETERS === % R: Radius; default is 20 % h: [wedge-height-above wedge-below-circle] % w: angle segment of wedge; default is 2*pi / 16 % === OUTPUT RESULTS ====== % PL: Wedge contour % % EXAMPLE: % PLwedgeoncircle(5,[1 .3],2*pi/16) % % See also: SGfreewheel % % % Copyright 2024 Tim C. Lueth |
SGfreewheel(Do,SS,"STL","ccw")- Creates a freewheel for a wind up motor |
 | % SGfreewheel(Do,SS,"STL","ccw") - Creates a freewheel for a wind up motor % (by Tim Lueth, VLFL-Lib, 2024-MAI-07 as class: AUTOMATIC DESIGN) % % This fnctn creates a freewheel consisting of two elements. An outer % ring, which is later connected to a gear wheel, and an inner ring, % which is fixed to the driven shaft. The fnctn can be coupled with the % SGspringSpiral and is part of the SGmotorwindup fnctn % In combination with SGspringSpiral, the usage of "ccw" must be the same % for both: SGspringSpiral, and SGfreewheel (Status of: 2024-05-26) % % Introduced first in SolidGeometry 5.4 % % See also: SGmotorwindup, SGspringSpiral, SGspringSpiralbolt % % SG=SGfreewheel([Do,SS,"STL","ccw"]) % === INPUT PARAMETERS === % Do: [% Diameter Height Thickness fixed hooks cavitiesperhook spring % thickness] default is [30 5 3 1.2 3 8 1] % SS: Shaft description ; please add transition fitting values % "STL": if used; all STL files are written into a folder % "ccw": if used, the freewheel (winding) is in the counter-clockwise % direction - Not really required % === OUTPUT RESULTS ====== % SG: {Inner Ring, Outer Ring} % % EXAMPLE: % SGfreewheel([30 10 3 1.2 6 4]) % % See also: SGmotorwindup, SGspringSpiral, SGspringSpiralbolt % % % Copyright 2024 Tim C. Lueth |
SGmotorwindup(SP,AX,fgns,"nocage","axis4","frontw","STL","anime","P")- creates wind up motor with a 3d printed spring |
 | % SGmotorwindup(SP,AX,fgns,"nocage","axis4","frontw","STL","anime","P") - creates wind up motor with a 3d printed spring % (by Tim Lueth, VLFL-Lib, 2024-MAI-07 as class: PARAMETRIC DESIGN) % % windup with the socketspanner is in cw direction on the cage side % there is also "debug" if used the construction will be shown in steps % (Status of: 2024-06-06) % % Introduced first in SolidGeometry 5.4 % % See also: SGwrenchsocketspanner, SGspringSpiral, SGspringSpiralbolt % % SGall=SGmotorwindup([SP,AX,fgns,"nocage","axis4","frontw","STL","anime" % ,"Gmotorwindup"]) % === INPUT PARAMETERS === % SP: Springparameter as in SGspringSpiral; default is [30,5,0.8,5] % AX: Axis description such as last parameter in SGspringSpiral; default % is [6.4 6 5 0] % fgns: gear ratio and stack level; default is [0 3]; 0 stands for % default values % "nocage": if used the gears are not covered by the rack % "axis4": if used and value <>0 a 4th axis is integrated into the % housing with shaft geometry % "frontw": if used in combination with axis4 it has front wheel drive % "STL": if used a directory with all parts is written to desktopdir % "anime": if used without STL it animates the motor % === OUTPUT RESULTS ====== % SGall: Cell list of parts % % EXAMPLE: % SGmotorwindup(30,'stl','nocage'); % design a minimum size motor % SGmotorwindup(30,'anime'); % animate the gear movemebts % SGmotorwindup(30,'axis4',50); % this is now a car not only a motor % SGmotorwindup(30,'axis4',50,'nocage'); % now the gear is not covered % % SGmotorwindup(30,'',[25 3],'axis4',50,'nocage'); % ration 25 on 3 levels % % See also: SGwrenchsocketspanner, SGspringSpiral, SGspringSpiralbolt % % % Copyright 2024 Tim C. Lueth |
SGofCPLreinforcement(CPL,f)- creates edge reinforcements based on a CPL |
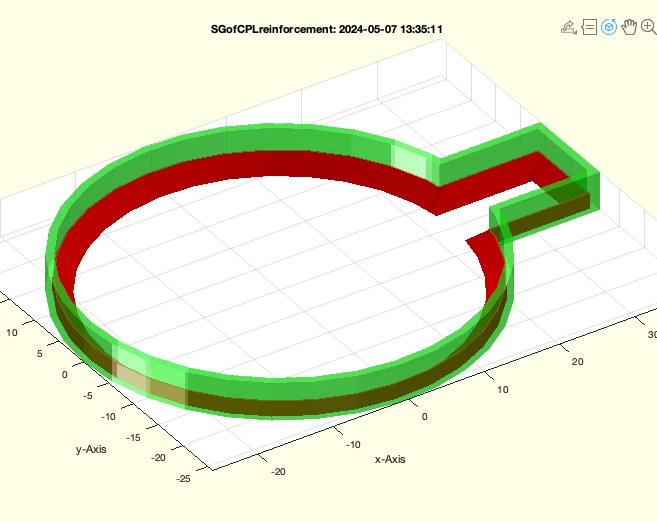 | % SGofCPLreinforcement(CPL,f) - creates edge reinforcements based on a CPL % (by Tim Lueth, VLFL-Lib, 2024-MAI-07 as class: SURFACES) % % Extracted from SGBAUHAUSbox % The values for depth and radius can be negative numbers too (Status of: % 2024-05-07) % % Introduced first in SolidGeometry 5.4 % % See also: SGBAUHAUSbox % % F=SGofCPLreinforcement(CPL,[f]) % === INPUT PARAMETERS === % CPL: Edge contour (inner CPL for positive dept, outer CPL for negative % depth) % f: [depth heigh radius]; default is [5 5 0] % === OUTPUT RESULTS ====== % F: Solid edge reinforcement % % EXAMPLE: % CPLi=CPLsample(36)*5; SGofCPLz([CPLbuffer(CPLi,1);nan nan;CPLi],5); SG=ans; % SGofCPLreinforcement(CPLi,[2 2 0]); SGplotalpha(SG,'g',0.5) % sharp edges % SGofCPLreinforcement(CPLbuffer(CPLi,1),[-2 2 0]); SGplotalpha(SG,'g',0.5) % Outer contour % SGofCPLreinforcement(CPLi,[2 2 1]); SGplotalpha(SG,'g',0.5) % radial edges % % SGofCPLreinforcement(CPLsample(30),[1 1]) % % See also: SGBAUHAUSbox % % % Copyright 2024 Tim C. Lueth |
SGwrenchsocketspanner(Dnw,H,HN)- This is a socket spanner mit clearance fitting for screws |
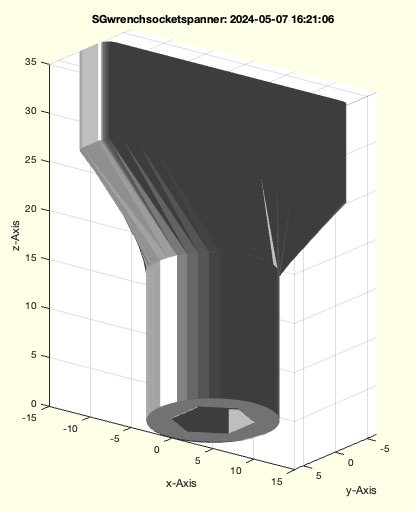 | % SGwrenchsocketspanner(Dnw,H,HN) - This is a socket spanner mit clearance fitting for screws % (by Tim Lueth, VLFL-Lib, 2024-MAI-07 as class: PARAMETRIC DESIGN) % % Alternatively, a solid can be transferred directly instead of the % parameters for an inner bus, the contour of which is then transferred % to a handle (Status of: 2024-10-24) % % Introduced first in SolidGeometry 5.4 % % See also: PLwrench, SGspringSpiral % % SG=SGwrenchsocketspanner([Dnw,H,HN]) % === INPUT PARAMETERS === % Dnw: [wrench-diameter, n-edges, wall]; default is [6.4 6 2.4] OR solid % H: Height of Tube; default is 30 % HN: [Length Width Height] of handle; default is [30 5 10] % === OUTPUT RESULTS ====== % SG: Solid Geometry of Wrench socket spanner % % EXAMPLE: % SGwrenchsocketspanner('',15); SG=ans % Short spanner % SGtorquelimiteraxial([25 15]/2, 12,5,1,'sin'); SG=SGrotate(ans,'x',pi); % SGwrenchsocketspanner(SG,15); SGN=ans % Short spanner % % % See also: PLwrench, SGspringSpiral % % % Copyright 2024 Tim C. Lueth |
SGcreatebin2mfile (binfile)- reads any file, and writes a matlab fnct that can create a copy of this file |
 | % SGcreatebin2mfile (binfile) - reads any file, and writes a matlab fnct that can create a copy of this file % (by Tim Lueth, VLFL-Lib, 2024-APR-21 as class: FILE HANDLING) % % reads in any file from disk and converts the binary code into hexcode. % This hexcode is automatically written with some additional code lines % into an executable m-file with the same name. % % If the m file is executed a copy of the binary file is created by the m % file in the desktopdir. % % This fnctn was written to create on deman different 3mf files in % different folder formats for different purposes without knowing exactly % the structure of the 3mf (zip) archive % % An earlier concept for ascii code was convertCode2String, % smbPSLibCreateBlock, smbPSLibCompile, smbPSLibInstall for the simscape % multi body simulation (Status of: 2024-05-09) % % Introduced first in SolidGeometry 5.4 % % See also: str2hexsstr, hexstr2str, smbPSLibCreateBlock, % smbPSLibCompile, convertCode2String, smbPSLibInstall % % SGcreatebin2mfile(binfile) % === INPUT PARAMETERS === % binfile: name of a binay file on disk % % EXAMPLE: % SGcreatebin2mfile('/Volumes/LUETH-WIN/WIN AIM Matlab Libraries/SolidGeometry-Code/Bambu.3mf') % % See also: str2hexsstr, hexstr2str, smbPSLibCreateBlock, % smbPSLibCompile, convertCode2String, smbPSLibInstall % % % Copyright 2024 Tim C. Lueth |
SGmakerworld()- Simply opens the WWW-page of grabcad.com in the system browser |
 | % SGmakerworld() - Simply opens the WWW-page of grabcad.com in the system browser % (by Tim Lueth, VLFL-Lib, 2024-APR-20 as class: AUXILIARY PROCEDURES) % % Use "CAD Exchanger" to convert IGES to STEP to STL % While GrabCAD shows objects that cannot be printed, MAKERWORLD is % created for printable STL files % There are 7 years delay between GrabCAD and MAKERWORLD to learn that % only printable CAD models make sense (Status of: 2024-04-20) % % Introduced first in SolidGeometry 5.4 % % See also: SGgrabcad, SG_DBconnectors.mat, SG_Patientknee.mat, DeepL % % SGmakerworld([]) % % EXAMPLE: % SGmakerworld % SGmakerworld('servo') % Searches for STL Files of Servo % % See also: SGgrabcad, SG_DBconnectors.mat, SG_Patientknee.mat, DeepL % % % Copyright 2024 Tim C. Lueth |
FTSCScmdfindserial(btab)- Searches for an URT-1 Board, tries different baud rates and searches for connected motors |
 | % FTSCScmdfindserial(btab) - Searches for an URT-1 Board, tries different baud rates and searches for connected motors % (by Tim Lueth, VLFL-Lib, 2024-APR-09 as class: SERIAL-ROBOTICS) % % Introduced first in SolidGeometry 5.4 % % See also: FTSCScmd, FTSCSdata, FTSCSmotorlist % % [ID,COM1]=FTSCScmdfindserial([btab]) % === INPUT PARAMETERS === % btab: list of baudrates; default is [1000000, 500000, 250000, 128000, % 115200, 76800, 57600, 38400] % === OUTPUT RESULTS ====== % ID: ID of the connected motors % COM1: open serial port if motors were found % % EXAMPLE: % global COM1, clear COM1 % [ID,COM1]=FTSCScmdfindserial % % See also: FTSCScmd, FTSCSdata, FTSCSmotorlist % % % Copyright 2024 Tim C. Lueth |
FTSCSmotorlist(COM1)- Searches for Motor ID connected to the FeeTEch URT-1 Board after opening the serial port |
 | % FTSCSmotorlist(COM1) - Searches for Motor ID connected to the FeeTEch URT-1 Board % (by Tim Lueth, VLFL-Lib, 2024-APR-09 as class: SERIAL-ROBOTICS) % % This fnctn simple pings the motor IDs 0:250 to find connected motors. % This fnctn is used in FTSCScmdfindserial % (Status of: 2024-04-09) % % Introduced first in SolidGeometry 5.4 % % See also: FTSCScmd, FTSCSdata, FTSCScmdfindserial % % ID=FTSCSmotorlist(COM1) % === INPUT PARAMETERS === % COM1: Already Open Serial Port % === OUTPUT RESULTS ====== % ID: array of IDs % % EXAMPLE: % COM1=serialport("/dev/cu.usbserial-840",115200) % ID=FTSCSmotorlist(COM1) % % % See also: FTSCScmd, FTSCSdata, FTSCScmdfindserial % % % Copyright 2024 Tim C. Lueth |
FTSCSdata(datarec,typ)- converts read data from the URT-1 board into the data format |
 | % FTSCSdata(datarec,typ) - converts read data from the URT-1 board into the data format % (by Tim Lueth, VLFL-Lib, 2024-APR-03 as class: SERIAL-ROBOTICS) % % Introduced first in SolidGeometry 5.4 % % See also: FTSCScmd, read, write % % data=FTSCSdata(datarec,[typ]) % === INPUT PARAMETERS === % datarec: data received from the URT-1 board by the read fnctn; cell % array if there are several answers % typ: data type such 'unit8' or 'uint16', default is 'uint8' % === OUTPUT RESULTS ====== % data: data in the type format % % EXAMPLE: % COM1=serialport("/dev/cu.usbserial-840",115200) % [a,b]=FTSCScmd(1,21,'',2,3) % read 3 data sets for PID of motor 1 % write(COM1,a,'uint8'); % 'unit8' is mandatory for URT-1 Board % zz=read(COM1,COM1.NumBytesAvailable,'uint8') % 'unit8' is mandatory for URT-1 Board % FTSCSdata(zz,'unit8') % some parameters are uint8 some are uint16 % % See also: FTSCScmd, read, write % % % Copyright 2024 Tim C. Lueth |
FTSCScmd(servoID,MemAddr,data,Fun,getd)- returns the command sequence for the FeeTech SCS RSC 485 Protocol of the URT-1 Board |
 | % FTSCScmd(servoID,MemAddr,data,Fun,getd) - returns the command sequence for the FeeTech SCS RSC 485 Protocol of the URT-1 Board % (by Tim Lueth, VLFL-Lib, 2024-APR-03 as class: SERIAL-ROBOTICS) % % Support by Sebastian Heininger of ERGOSURG GmbH Ismaning % Fnctn table % 1 = PING % 2 = READ % 3 = WRITE % 4 = REG WRITE % 5 = ACTION % 6 = RESET % 10 = ANGLE RESET % 131= SYNC Write % (Status of: 2024-04-05) % % Introduced first in SolidGeometry 5.4 % % See also: FTSCSdata % % [cmd,str]=FTSCScmd([servoID,MemAddr,data,Fun,getd]) % === INPUT PARAMETERS === % servoID: ServoID; default is 1 % MemAddr: Memory Address; default is 42 % data: uint16 data to write; default is empty % Fun: default is 3 for write % getd: number of uint16 to read % === OUTPUT RESULTS ====== % cmd: uint8 data array to send using write % str: Hex string for documentation % % EXAMPLE: % COM1=serialport("/dev/cu.usbserial-840",115200) % [a,b]=FTSCScmd(1,21,'',2,3) % read 3 data sets for PID of motor 1 % write(COM1,a,'uint8'); % 'unit8' is mandatory for URT-1 Board % zz=read(COM1,COM1.NumBytesAvailable,'uint8') % 'unit8' is mandatory for URT-1 Board % FTSCSdata(zz,'unit8') % some parameters are uint8 some are uint16 % % See also: FTSCSdata % % % Copyright 2024 Tim C. Lueth |
hexstr2uint8(STR)- converts a hexadecimal string into a uint8 array |
 | % hexstr2uint8(STR) - converts a hexadecimal string into a uint8 array % (by Tim Lueth, VLFL-Lib, 2024-APR-03 as class: AUXILIARY PROCEDURES) % % used for the communication with the FeeTech URT-1 Board SCS-Protocoll % (Status of: 2024-04-03) % % Introduced first in SolidGeometry 5.4 % % See also: hexstr2str, str2hexsstr, dec2hex % % [U8,CSHex]=hexstr2uint8(STR) % === INPUT PARAMETERS === % STR: string or char array with ot without spaces % === OUTPUT RESULTS ====== % U8: Uint8 array of the hex data % CSHex: Checksum in Hexadecimal % % EXAMPLE: % hexstr2uint8("FFFF0105032A0010") % hexstr2uint8("FF FF 01 05 03 2A 00 10") % [a,b]=hexstr2uint8('FF FF 01 05 03 2A 00 10'), c=reshape(dec2hex(a)',[],1)' % % See also: hexstr2str, str2hexsstr, dec2hex % % % Copyright 2024 Tim C. Lueth |
raamboGET(cmd)- Same as raamboSET but without setting values |
 | % raamboGET(cmd) - Same as raamboSET but without setting values % (by Tim Lueth, VLFL-Lib, 2024-MÄR-10 as class: SERIAL-ROBOTICS) % % ======================================================================= % REMOVED FROM LIBRARY (2024-04-05) - WILL NOT BE PART OF FINAL RELEASE % ======================================================================= % % Introduced first in SolidGeometry 5.4 % % See also: raamboSET % % x=raamboGET([cmd]) % === INPUT PARAMETERS === % cmd: command list same as raamboSET % === OUTPUT RESULTS ====== % x: result devlivered by the raambo firmware % % See also: raamboSET % % % Copyright 2024 Tim C. Lueth |
raambostartup(pose)- sets important parameter for experiments with the Raambo Robot |
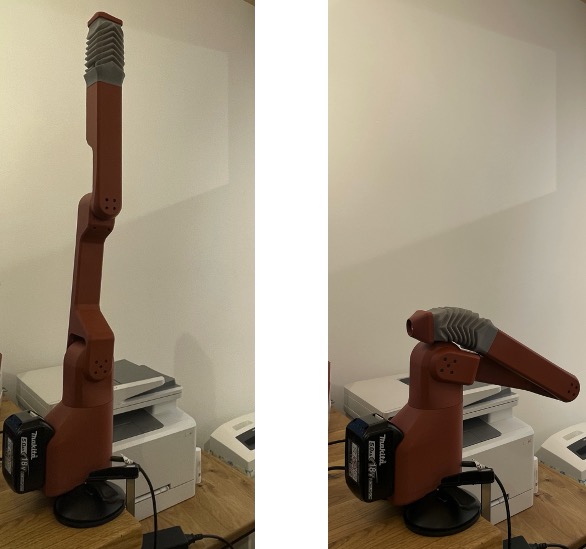 | % raambostartup(pose) - sets important parameter for experiments with the Raambo Robot % (by Tim Lueth, VLFL-Lib, 2024-MÄR-10 as class: SERIAL-ROBOTICS) % % uses the fnctn raamboSET for setting different useful parameters first % and move the robot into a sepcified pose (Status of: 2024-04-05) % % Introduced first in SolidGeometry 5.4 % % See also: raambocommandline, raamboscreen, raamboSET, raamboGET % % raambostartup([pose]) % === INPUT PARAMETERS === % pose: 'straight', 'sleep', array of encoder goal positions % % EXAMPLE: % global RAPORT; RAPORT=serialport('/dev/tty.usbmodem21201',230400); % raambostartup % raambostartup('straight') % raambostartup('sleep') % raambostartup([2000 2000 2000 2000]) % % See also: raambocommandline, raamboscreen, raamboSET, raamboGET % % % Copyright 2024 Tim C. Lueth |
raamboSET(cmd,val,mot)- sends robot cmommands throught the global RAPORT to a Raambo-Robot |
 | % raamboSET(cmd,val,mot) - sends robot cmommands throught the global RAPORT to a Raambo-Robot % (by Tim Lueth, VLFL-Lib, 2024-MÄR-10 as class: SERIAL-ROBOTICS) % % this is to avoid using raambocommandline or raamboscreen % Raambo Arduino Firmware based communication % On Mac/OSX use /dev/tty.usb* for Arduino (Modem DCD) and /dev/cu.usb* % for URT-1 communication (Status of: 2024-04-04) % % Introduced first in SolidGeometry 5.4 % % See also: raambostartup, raambocommandline, raamboscreen, raamboGET % % x=raamboSET([cmd,val,mot]) % === INPUT PARAMETERS === % cmd: cmd such as "?", or speed, goal, pos % val: value for all or one motor % mot: selection of motors to be addressed % === OUTPUT RESULTS ====== % x: result devlivered by the raambo firmware % % EXAMPLE: % global RAPORT; RAPORT=serialport('/dev/tty.usbmodem21201',230400); % raamboSET('I',0), raamboSET('D',0), raamboSET('torque',300), raamboSET('speed',10) % raamboSET('goal',2000) % Straight up % raamboSET('goal',1800) % Straight up % raamboSET('goal',2200) % Straight up % % % % See also: raambostartup, raambocommandline, raamboscreen, raamboGET % % % Copyright 2024 Tim C. Lueth |
SGmusicstandextension(L,"STL")- supplies extension elements for an orchestra music stand |
 | % SGmusicstandextension(L,"STL") - supplies extension elements for an orchestra music stand % (by Tim Lueth, VLFL-Lib, 2024-MÄR-08 as class: PARAMETRIC DESIGN) % % A very popular music stand comes from the company Thomann. It is % possible to open A4 music books and use them on the music stand. % However, if you want to use sheet music from 4 A4 sheets next to each % other, the music stand is not wide enough. The extension pieces for % this fnctn fit into the grid of holes in the back plate and can be % attached or removed by turning them 90 degrees. (Status of: % 2024-03-09) % % Introduced first in SolidGeometry 5.4 % % See also: SGmultisocketclamp, SGadapterHandrailold % % SGmusicstandextension([L,"STL"]) % === INPUT PARAMETERS === % L: Length of the extension default is 240 => 240-70 = 17cm extension on % the left and right % "STL": if used, an STL file is written on desk % % Additional Hyperlinks: % Thomann Orchesterpult Deluxe % % See also: SGmultisocketclamp, SGadapterHandrailold % % % Copyright 2024 Tim C. Lueth |
raamboscreen(PORT)- implements a character based communication to a Raambo®-Robot via serial link (USB) |
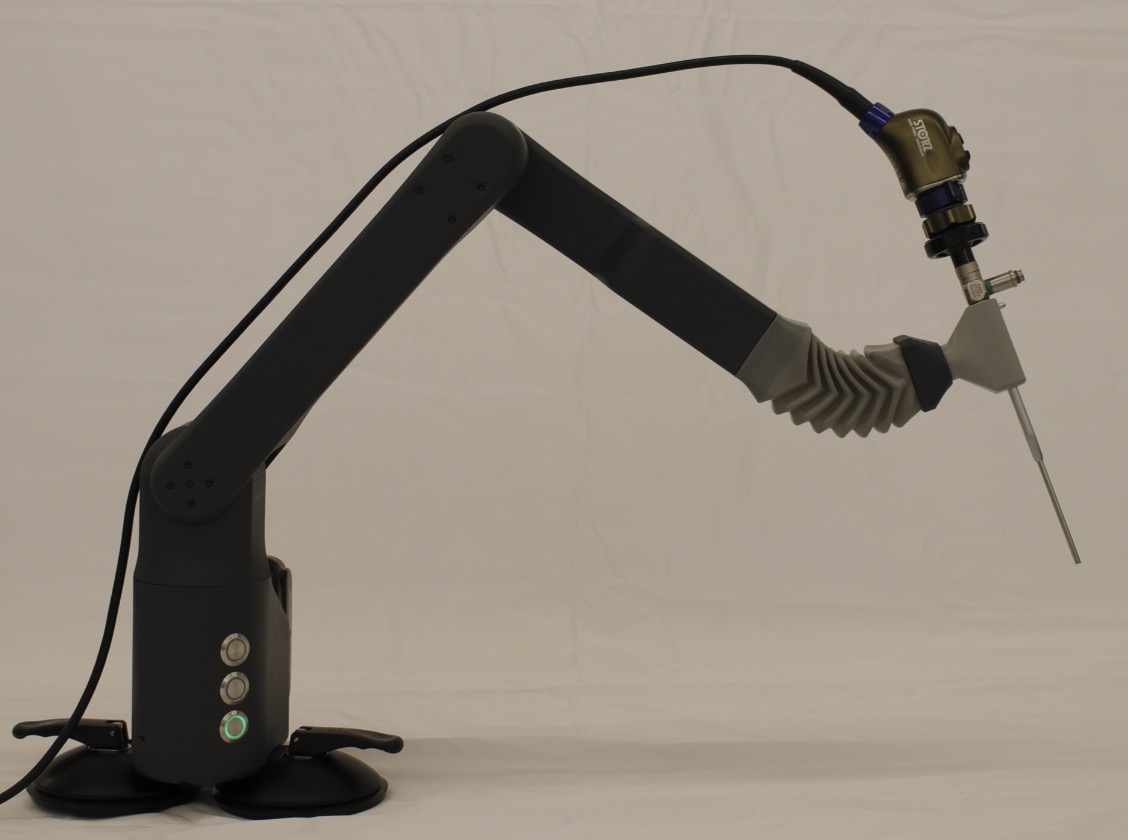 | % raamboscreen(PORT) - implements a character based communication to a Raambo®-Robot via serial link (USB) % (by Tim Lueth, VLFL-Lib, 2024-MÄR-02 as class: SERIAL-ROBOTICS) % % does not complety work like screen, but the most possible terminal in % Matlab (Status of: 2024-03-03) % % Introduced first in SolidGeometry 5.4 % % See also: serialport, raambocommandlines, readkeyboardchar % % raamboscreen(PORT) % === INPUT PARAMETERS === % PORT: already opened PORT such as COM1 or /dev/tty.usb11001 % % EXAMPLE: %% Unplug and plugin cable to the robot on robot side first % COM1=serialport('/dev/tty.usbmodem21201',230400); % raamboscreen(COM1); % % See also: serialport, raambocommandlines, readkeyboardchar % % % Copyright 2024 Tim C. Lueth |
raambocommandlines(PORT)- implements a command line based communication to a Raambo®-Robot via serial link (USB) |
 | % raambocommandlines(PORT) - implements a command line based communication to a Raambo®-Robot via serial link (USB) % (by Tim Lueth, VLFL-Lib, 2024-MÄR-02 as class: SERIAL-ROBOTICS) % % fnctn % 1st reads out text from the serial link and prints it using printf % 2nd reads in a text line using matlabs input( % 3rd sends it to the robot via serial link % 4th reads out text from the serial link and prints it using printf % (Status of: 2024-03-03) % % Introduced first in SolidGeometry 5.4 % % See also: serialport, raamboscreen % % raambocommandlines(PORT) % === INPUT PARAMETERS === % PORT: already opened PORT such as COM1 or /dev/tty.usb11001 % % EXAMPLE: %% Unplug and plugin cable to the robot on robot side first % COM1=serialport('/dev/tty.usbmodem21201',230400); % raambocommandlines(COM1); % % % See also: serialport, raamboscreen % % % Copyright 2024 Tim C. Lueth |
readkeyboardchar(cmdarray)- reads a single keyboard key or returns empty |
 | % readkeyboardchar(cmdarray) - reads a single keyboard key or returns empty % (by Tim Lueth, VLFL-Lib, 2024-MÄR-02 as class: USER INTERFACE) % % THIS fnctn readkeyboardchar is used for the serial robotics terminal % communication. % In contrast to getkeyboardchar, this fnctn does not wait. % A problem is, that the key is plotted in the command window. (Status % of: 2024-03-03) % % Introduced first in SolidGeometry 5.4 % % See also: getkeyboardchar % % [cc,cmdarray]=readkeyboardchar(cmdarray) % === INPUT PARAMETERS === % cmdarray: optional keyboard buffer to extend OR false for delete % keyboard buffer % === OUTPUT RESULTS ====== % cc: last char or empty % cmdarray: keyboard including last char % % EXAMPLE: % [a,b]=readkeyboardchar(false); while ~isequal(a,char(13)); [a,b]=readkeyboardchar(b);end; b, uint8(b) % % See also: getkeyboardchar % % % Copyright 2024 Tim C. Lueth |
SGaddsurfpoints(SG,alpha,ds,dx,dy)- adds gridpoints at surfaces and edges at all surfaces |
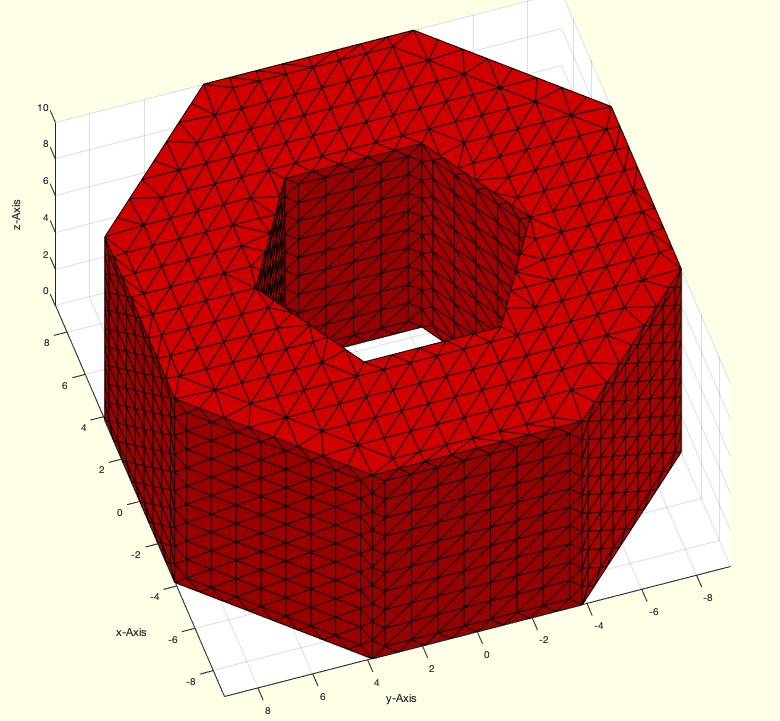 | % SGaddsurfpoints(SG,alpha,ds,dx,dy) - adds gridpoints at surfaces and edges at all surfaces % (by Tim Lueth, VLFL-Lib, 2024-FEB-18 as class: SURFACES) % % Introduced first in SolidGeometry 5.4 % % See also: SGremsurfpoints, SGalphaShape, SGremsurfedgepoints, % SGremedgepoints % % SGN=SGaddsurfpoints(SG,[alpha,ds,dx,dy]) % === INPUT PARAMETERS === % SG: Solid geometry % alpha: angle for surface differentiation; default is 0.01 % ds: distance on edges; default is % dx: distance in x; default is 1 % dy: distance in y; default is dx % === OUTPUT RESULTS ====== % SGN: Solid geometry with additional points on edges and surfaces % % EXAMPLE: % XXX=SGaddsurfpoints(SGsample(16),'',1,1,1); dbplot(XXX); % % XXX=SGaddsurfpoints(SGsample(16),'',[1 2 1]); dbplot(XXX); % % See also: SGremsurfpoints, SGalphaShape, SGremsurfedgepoints, % SGremedgepoints % % % Copyright 2024 Tim C. Lueth |
VLisonCVL(CVL,PL,tol)- returns wether a point is on a segment of a CVL or CPL |
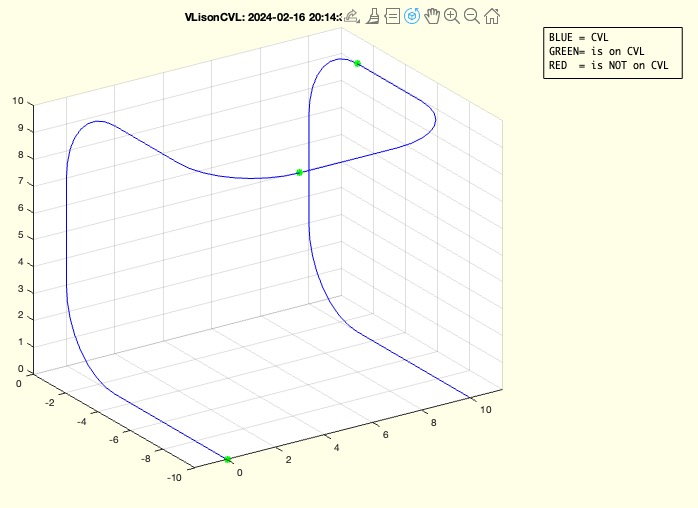 | % VLisonCVL(CVL,PL,tol) - returns wether a point is on a segment of a CVL or CPL % (by Tim Lueth, VLFL-Lib, 2024-FEB-15 as class: CLOSED POLYGON LISTS) % % MUST DISTINGUISH between open and closed lines % exists also as distanceVLtoVLEL 2018-MÄR-11 with tolerances % (Status of: 2024-02-18) % % Introduced first in SolidGeometry 5.4 % % See also: CPLinsideCPL, insideCPS, insidePLEL, distanceVLtoVLEL % % [ci,tp]=VLisonCVL([CVL,PL,tol]) % === INPUT PARAMETERS === % CVL: CPL or CVL % PL: PL or VL % tol: if tol > 0; fnctn distanceVLtoVLEL is used; default is 0; much % faster with 0 % === OUTPUT RESULTS ====== % ci: index of PL % tp: matrix of PL and segment list of CVL % % EXAMPLE: % CVL=CVLsample(17); [a,b]=VLisonCVL(CVL,CVL([1 28 38],:)), VLisonCVL(CVL,CVL([1 28 38],:)); % VLisonCVL(CVL,[4 4 4]); % CVL=CVLsample(17); VLisonCVL(CVL,CVL([1 28 39],:)+0.01,0.1); [a,b]=VLisonCVL(CVL,CVL([1 28 38],:)+0.01,0.1) % % See also: CPLinsideCPL, insideCPS, insidePLEL, distanceVLtoVLEL % % % Copyright 2024 Tim C. Lueth |
SGrescBox(s,"STL")- Creates for the iMedCap Rescue Robotics Project a 1:10 Model of the Patient Box |
 | % SGrescBox(s,"STL") - Creates for the iMedCap Rescue Robotics Project a 1:10 Model of the Patient Box % (by Tim Lueth, VLFL-Lib, 2024-FEB-14 as class: PARAMETRIC DESIGN) % % Uses SGcutTinsertpins to make the model printable as FDM (Status of: % 2024-02-15) % % Introduced first in SolidGeometry 5.4 % % See also: SGcutTinsertpins % % SG=SGrescBox([s,"STL"]) % === INPUT PARAMETERS === % s: [length width height ramp profile]; default is [220 70 75 70 4] or so % "STL": if used, the box is separated writen to an STL-Directory % === OUTPUT RESULTS ====== % SG: Cell list of Solids {front-red, back-green} % % EXAMPLE: % SGrescBox; dbplot(ans); % % See also: SGcutTinsertpins % % % Copyright 2024 Tim C. Lueth |
XPSrulechecker(ops)- checks XPS rules for easy human errors during rule definition |
 | % XPSrulechecker(ops) - checks XPS rules for easy human errors during rule definition % (by Tim Lueth, VLFL-Lib, 2024-JAN-28 as class: ARTIFICIAL INTELLIGENCE) % % under constant development (Status of: 2024-02-03) % % Introduced first in SolidGeometry 5.4 % % See also: XPSblocksworldequation, XPSlawcase, XPSblocksworld, % XPSslidingpuzzle % % XPSrulechecker(ops) % === INPUT PARAMETERS === % ops: STRIPS rules [Action, Condition-List, Add-list, Delete-list, % NOT-Condition-List] % % See also: XPSblocksworldequation, XPSlawcase, XPSblocksworld, % XPSslidingpuzzle % % % Copyright 2024 Tim C. Lueth |
XPSslidingpuzzle- Expert System implementing the first General Problem Solver (AI Programm) |
 | % XPSslidingpuzzle - Expert System implementing the first General Problem Solver (AI Programm) % (by Tim Lueth, VLFL-Lib, 2024-JAN-08 as class: ARTIFICIAL INTELLIGENCE) % % This creates simple the test data for the GPS=AI with respect to to % Peter Norvig (1991) similar to XPSblocksworld % Please test also uncomplete goal conditions such as "space on 4" % (Status of: 2024-01-10) % % Introduced first in SolidGeometry 5.4 % % See also: XPSGPS, XPSEQS, XPSblocksworld % % LITERATURE: % - Norvig, Peter (1991): Paradigms of Artificial Intelligence % Programming, Morgan Kaufmann Publisher, San Mateo, CA, USA % - Korf, R., and Schultze, P. 2005. Large-scale parallel breadth-first % search. In Proceedings of the 20th National Conference on Artificial % Intelligence (AAAI-05), 1380–1385. % % [ops,start,goal]=XPSslidingpuzzle % === OUTPUT RESULTS ====== % ops: cell list [n x 4] describing action-name, precondition, add-state, % diff-state % start: string array describing the start state % goal: string array describing the final state % % EXAMPLE: % [ops,start,goal]=XPSslidingpuzzle % Example efinitions of operators start-state and goal-state % XPSEQS(ops,start, goal, 'debug') % takes very very long % XPSEQS(ops,start, ["space on 6"], 'debug'); % [a,b,c,d]=XPSEQS(ops,start, ["space on 6"], 'debug','first'); % 4 seconds % tic; [a,b,c,d]=XPSEQS(ops,start, ["space on 6" "A on 4"], 'first'); toc % 90 seconds % % See also: XPSGPS, XPSEQS, XPSblocksworld % % % Copyright 2024 Tim C. Lueth |
CPLbox(sze,txt)- create a CPL of a square including text |
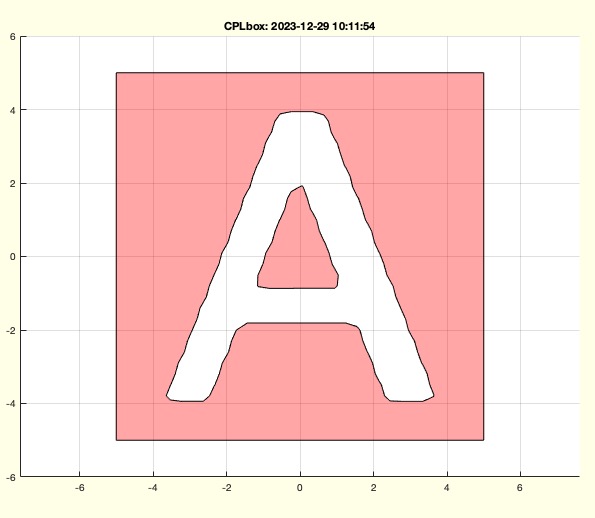 | % CPLbox(sze,txt) - create a CPL of a square including text % (by Tim Lueth, VLFL-Lib, 2023-DEZ-23 as class: CLOSED POLYGON LISTS) % % Useful for the box world domain. Slow fnctn because of CPLoftext % (Status of: 2023-12-29) % % Introduced first in SolidGeometry 5.4 % % See also: PLsquare, CPLoftext, CPLfitsinCPL % % CPL=CPLbox([sze,txt]) % === INPUT PARAMETERS === % sze: [x y]; default is 10 % txt: chars for labeling % === OUTPUT RESULTS ====== % CPL: CPL of Contour % % EXAMPLE: % CPL=CPLbox(10,'A'); SGfigure(0,90); CPSplot(CPL); % CPLbox([30 20],'test') % CPLbox([300 20],'Table'); % % % See also: PLsquare, CPLoftext, CPLfitsinCPL % % % Copyright 2023 Tim C. Lueth |
exp_2023_12_21block- EXPERIMENT TO CREATE AND DETECT SITUATONS IN BLOCK WORLD PROBLEMS |
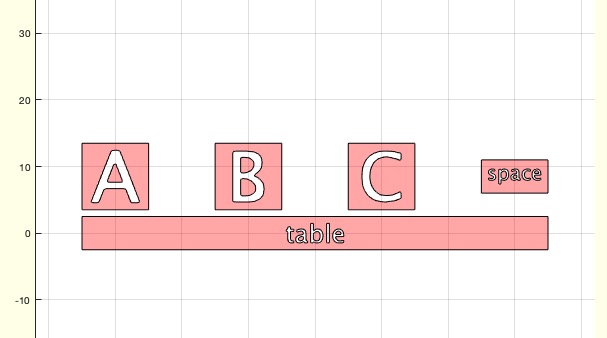 | % exp_2023_12_21block - EXPERIMENT TO CREATE AND DETECT SITUATONS IN BLOCK WORLD PROBLEMS % (by Tim Lueth, VLFL-Lib, 2023-DEZ-21 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 5.4 % % exp_2023_12_21block % % % Copyright 2023 Tim C. Lueth |
CPLobjects2cells(CPL)- returns CPL as cell list of CPLs separated by not-overlapping outer-border CPLs |
 | % CPLobjects2cells(CPL) - returns CPL as cell list of CPLs separated by not-overlapping outer-border CPLs % (by Tim Lueth, VLFL-Lib, 2023-DEZ-20 as class: CLOSED POLYGON LISTS) % % reverse fnctn is: CPLcell2NaN % (Status of: 2023-12-20) % % Introduced first in SolidGeometry 5.4 % % See also: CPLsortinout, CPLregions, PSregions, CPLcellobjects, % CPLcell2NaN, CPLregions2cell % % CPLN=CPLobjects2cells(CPL) % === INPUT PARAMETERS === % CPL: NaN separated CPL % === OUTPUT RESULTS ====== % CPLN: cell list of CPLs separated by not-overlapping outer-border CPLs % % EXAMPLE: CPLbox('','A'); A=ans; CPLbox('','B'); B=ans; CPLbox('','C'); C=ans; CPLbox('','D'); D=ans; % CPLbox([70 5],'table'); T=ans; % CPLarrange({A,B,C,D},T,'ontop',1,'add'); CPL=ans; SGfigure; CPSplot(CPL); % CPLobjects2cells(CPL), CPLN=ans; % % See also: CPLsortinout, CPLregions, PSregions, CPLcellobjects, % CPLcell2NaN, CPLregions2cell % % % Copyright 2023 Tim C. Lueth |
CPLselectspatial(CPL,rel,"object")- selects parts of CPL based on spatial or other relations |
 | % CPLselectspatial(CPL,rel,"object") - selects parts of CPL based on spatial or other relations % (by Tim Lueth, VLFL-Lib, 2023-DEZ-20 as class: ARTIFICIAL INTELLIGENCE) % % Very powerful and comprehension-enhancing fnctn. This fnctn is under % continous development % Try maxy, miny, maxx, minx, equal, inout, areaascend, areadescend, % equalobj, under, underobj, overobj, % debug, ??? (Status of: 2023-12-29) % % Introduced first in SolidGeometry 5.4 % % See also: selectNaN, CPLselectbynearestP, CPLselectbyP % % CPLA=CPLselectspatial(CPL,[rel,"object"]) % === INPUT PARAMETERS === % CPL: Closed Polygon List % rel: spatial or other relation % "object": if used objects instead of CPLs are used in general % === OUTPUT RESULTS ====== % CPLA: Selected CPL % % EXAMPLE: % CPLbox('','A'); A=ans; CPLbox('','B'); B=ans; CPLbox('','C'); C=ans; CPLbox('','D'); D=ans; % CPLbox([10 3],'space'); S=ans; CPLbox([70 5],'table'); T=ans; % CPLarrange({A,B,C,S},T,'ontop',1,'add'); CPL=ans; SGfigure; CPSplot(CPL); % CPLselectspatial(CPL,'top','left',2) % CPLselectspatial(CPL,'object','top','left',2) % CPLselectspatial(CPL,'equalobj',C) % CPLselectspatial(CPL,'object','overobj',T,'equalobj',A); % Gibt es ein Object A oberhalb von Table % CPLselectspatial(CPL,'object','overobj',T,'left',2); % CPLselectspatial(CPL,'overobj',T,'left',2); % CPLselectspatial(CPL,'overobj',T,'left',2:200,'top',1); % CPLselectspatial(CPL,'object','overobj',T,'equalobj',A); XXX=ans; CPLN=CPLsubtract(CPL,XXX); SGfigure; CPSplot(CPLN) % YYY=CPLtransrelCPL(A,CPLselectspatial(CPL,'object','equalobj',B),'center','ontop',1); CPLunion(CPLN,YYY); CPLM=ans; % SG=SGofCPLextrude(CPLM,10,'y'); SGfigure(SG); % % See also: selectNaN, CPLselectbynearestP, CPLselectbyP % % % Copyright 2023-2024 Tim C. Lueth |
CPLregions2cell(ps)- returns CPL as cell list of CPLs separated by not-overlapping outer-border CPLs |
 | % CPLregions2cell(ps) - returns CPL as cell list of CPLs separated by not-overlapping outer-border CPLs % (by Tim Lueth, VLFL-Lib, 2023-DEZ-20 as class: CLOSED POLYGON LISTS) % % reverse fnctn is: CPLcell2NaN % (Status of: 2023-12-29) % % Introduced first in SolidGeometry 5.4 % % See also: CPLsortinout, CPLregions, PSregions, CPLcellobjects, % CPLcell2NaN % % CPL=CPLregions2cell(ps) % === INPUT PARAMETERS === % ps: NaN separated CPL % === OUTPUT RESULTS ====== % CPL: cell list of CPLs separated by not-overlapping outer-border CPLs % % EXAMPLE: CPLbox('','A'); A=ans; CPLbox('','B'); B=ans; CPLbox('','C'); C=ans; CPLbox('','D'); D=ans; % CPLbox([70 5],'table'); T=ans; % CPLarrange({A,B,C,D},T,'ontop',1,'add'); CPL=ans; SGfigure; CPSplot(CPL); % CPLregions2cell(CPL), CPLN=ans; % % See also: CPLsortinout, CPLregions, PSregions, CPLcellobjects, % CPLcell2NaN % % % Copyright 2023 Tim C. Lueth |
CPLisidenticalregistered(CPLA,CPLB,tol)- Compares two CPLS in the same orientation and size |
 | % CPLisidenticalregistered(CPLA,CPLB,tol) - Compares two CPLS in the same orientation and size % (by Tim Lueth, VLFL-Lib, 2023-DEZ-20 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.4 % % See also: TregisterConvexHull, CPLisidenticalcontour % % [b,A]=CPLisidenticalregistered(CPLA,CPLB,[tol]) % === INPUT PARAMETERS === % CPLA: 1st CPL % CPLB: 2nd CPL % tol: tolerance in relative difference area; default is 0.1 % === OUTPUT RESULTS ====== % b: logical information % A: difference in area % % EXAMPLE: % CPL=CPLbox(10,'A'); % CPLisidenticalregistered(CPL,PLtransP(CPL,[10 10])) % CPLisidenticalregistered(CPL,PLtransP(CPLbox(10),[10 10])) % % % See also: TregisterConvexHull, CPLisidenticalcontour % % % Copyright 2023 Tim C. Lueth |
CPLcell2NaN(CPL)- concatenates a cell list of CPLs into one single CPL |
 | % CPLcell2NaN(CPL) - concatenates a cell list of CPLs into one single CPL % (by Tim Lueth, VLFL-Lib, 2023-DEZ-20 as class: CLOSED POLYGON LISTS) % % the opposite fnctns are: % CPLobjects2cells % CPLregions2cell (Status of: 2023-12-29) % % Introduced first in SolidGeometry 5.4 % % See also: CPLobjects2cells, CPLregions2cell, CPLbox % % CPLN=CPLcell2NaN(CPL) % === INPUT PARAMETERS === % CPL: Cell list of CPLs % === OUTPUT RESULTS ====== % CPLN: CPL that is a simple concatenation of all contours in CPL % % EXAMPLE: % if ~exist('A') || ~exist('B') || ~exist('C') || ~exist('D') || ~exist('S') || ~exist('T') % CPLbox('','A'); A=ans; CPLbox('','B'); B=anCPLs; CPLbox('','C'); C=ans; CPLbox('','D'); D=ans; % CPLbox([10 5],'space'); S=ans; CPLbox([70 5],'table'); T=ans; % end % CPLarrange({A,B,C,S},T,'ontop',1,'add'); CPL=ans; SGfigure; CPSplot(CPL); % CPLC=CPLobjects2cells(CPL) % CPLcell2NaN(CPLC) % % % See also: CPLobjects2cells, CPLregions2cell, CPLbox % % % Copyright 2023 Tim C. Lueth |
CPLarrange(CPLC,CPL2)- Arranges a set of CPLS to be as widw as another one in x dimension |
 | % CPLarrange(CPLC,CPL2) - Arranges a set of CPLS to be as widw as another one in x dimension % (by Tim Lueth, VLFL-Lib, 2023-DEZ-20 as class: CLOSED POLYGON LISTS) % % will be extended in future (Status of: 2023-12-29) % % Introduced first in SolidGeometry 5.4 % % See also: CPLcopypattern, CPLcopyradial % % CPLC=CPLarrange(CPLC,[CPL2]) % === INPUT PARAMETERS === % CPLC: is a cell list of CPLs % CPL2: is the dimension defining contour % === OUTPUT RESULTS ====== % CPLC: Is an NAN separated CPL % % EXAMPLE: % CPLarrange({PLcircle(4,4), PLcircle(4,3), PLcircle(4)}, PLsquare([40 5])) % % See also: CPLcopypattern, CPLcopyradial % % % Copyright 2023 Tim C. Lueth |
wordfind(txt,word,sep)- finds words in a string (charchain) |
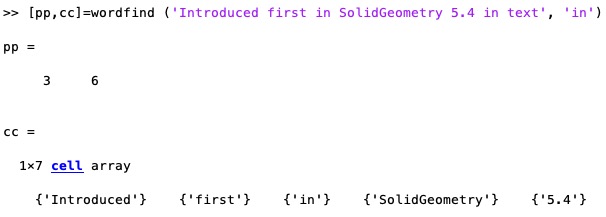 | % wordfind(txt,word,sep) - finds words in a string (charchain) % (by Tim Lueth, VLFL-Lib, 2023-DEZ-18 as class: ARTIFICIAL INTELLIGENCE) % % Introduced first in SolidGeometry 5.4 % % See also: strfind, ismember, split, join % % [pp,ccc]=wordfind(txt,word,[sep]) % === INPUT PARAMETERS === % txt: charchain to search in % word: word to look for % sep: separators; default is {',',' ',';'} % === OUTPUT RESULTS ====== % pp: array of hits % ccc: separated words % % EXAMPLE: % wordfind ('Introduced first in SolidGeometry 5.4', 'intro') % Not found % wordfind ('Introduced first in SolidGeometry 5.4', 'in') % 3rd word % wordfind ('Introduced first in SolidGeometry 5.4 in text', 'in') % two words % % See also: strfind, ismember, split, join % % % Copyright 2023 Tim C. Lueth |
XPSruleswrite(ops,fname)- writes rules into an excel sheet |
 | % XPSruleswrite(ops,fname) - writes rules into an excel sheet % (by Tim Lueth, VLFL-Lib, 2023-DEZ-14 as class: ARTIFICIAL INTELLIGENCE) % % The format of the rules will may change over Time (Status of: % 2023-12-14) % % Introduced first in SolidGeometry 5.4 % % See also: XPSrulesread % % rname=XPSruleswrite(ops,[fname]) % === INPUT PARAMETERS === % ops: operators % fname: filename % === OUTPUT RESULTS ====== % rname: rules full file name % % EXAMPLE: % [ops,start, goal]=XPSblocksworld; XPSruleswrite(ops,'TEST.XLS') % % See also: XPSrulesread % % % Copyright 2023 Tim C. Lueth |
XPSrulesread(fname)- reades rules from an excel sheet |
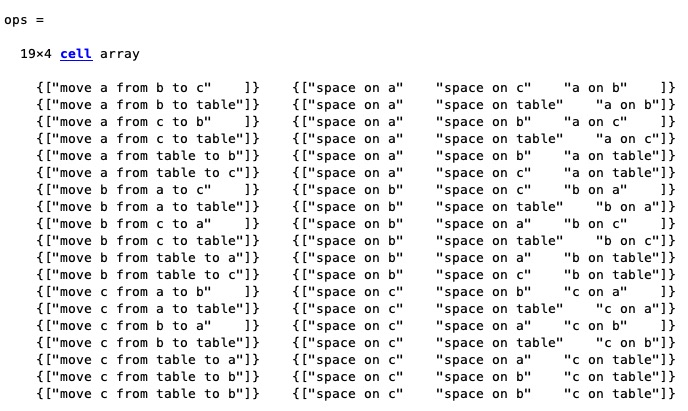 | % XPSrulesread(fname) - reades rules from an excel sheet % (by Tim Lueth, VLFL-Lib, 2023-DEZ-14 as class: ARTIFICIAL INTELLIGENCE) % % The format of the rules will may change over Time (Status of: % 2023-12-20) % % Introduced first in SolidGeometry 5.4 % % See also: XPSruleswrite % % T=XPSrulesread([fname]) % === INPUT PARAMETERS === % fname: filename to read from % === OUTPUT RESULTS ====== % T: rules list % % EXAMPLE: % [ops,start, goal]=XPSblocksworld; XPSruleswrite(ops,'TEST.XLS') % XPSrulesread(rname); ops=ans % % See also: XPSruleswrite % % % Copyright 2023 Tim C. Lueth |
char2strarr(chr,splt)- converts a list of string inside a char chain into a string array |
 | % char2strarr(chr,splt) - converts a list of string inside a char chain into a string array % (by Tim Lueth, VLFL-Lib, 2023-DEZ-13 as class: ARTIFICIAL INTELLIGENCE) % % RESULT IS LIKE: ["space on a" "a on table" "space on b" "b on table"] % (Status of: 2023-12-13) % % Introduced first in SolidGeometry 5.4 % % See also: strarr2char % % strarr=char2strarr(chr,[splt]) % === INPUT PARAMETERS === % chr: char chain with quation mark separated strings % splt: splitchar default is '"' % === OUTPUT RESULTS ====== % strarr: string array % % EXAMPLE: % x= '"START" "move a from b to table" "move b from c to a" "move c from table to b" "FINISH"' % y=char2strarr(x) % u=strarr2char(y) % x='space on $A, space on $B, $A on $B' % char2strarr(x,',') % % See also: strarr2char % % % Copyright 2023 Tim C. Lueth |
strarr2char(strarr)- convertes a single row or single col string array into a char chain - no matrix |
 | % strarr2char(strarr) - convertes a single row or single col string array into a char chain - no matrix % (by Tim Lueth, VLFL-Lib, 2023-DEZ-13 as class: ARTIFICIAL INTELLIGENCE) % % RESULT IS LIKE: '"space on a" "a on table" "space on b" "b on table"' % (Status of: 2023-12-13) % % Introduced first in SolidGeometry 5.4 % % See also: char2strarr % % chr=strarr2char(strarr) % === INPUT PARAMETERS === % strarr: string array % === OUTPUT RESULTS ====== % chr: char chain that containts a string array % % EXAMPLE: % x=[ "START" "move a from b to table" "move b from c to a" "move c from table to b" "FINISH"] % y=strarr2char(x) % u=char2strarr(y) % % % See also: char2strarr % % % Copyright 2023 Tim C. Lueth |
charcell2stringcellarray(chrc)- converts xps cell list of string arrays into cell list of charchains |
 | % charcell2stringcellarray(chrc) - converts xps cell list of string arrays into cell list of charchains % (by Tim Lueth, VLFL-Lib, 2023-DEZ-11 as class: ARTIFICIAL INTELLIGENCE) % % RESULT IS LIKE: {["space on a" "space on c" "a on b" ]} % % the current XPS format is a cell lits of string arrays that cannot be % written in a n excel file without problems. Thid fnctn converts the % cell list of string arrays into a cell list of charchains (Status of: % 2023-12-13) % % Introduced first in SolidGeometry 5.4 % % See also: SGwritetable, array2tableTL, stringcellarray2charcell % % strac=charcell2stringcellarray(chrc) % === INPUT PARAMETERS === % chrc: cell array of char chains with quotation marks % === OUTPUT RESULTS ====== % strac: cell array of string arrays % % EXAMPLE: % [ops,start, goal]=XPSblocksworld % stringcellarray2charcell(ops); xlscell=ans % SGwritetable('test.xls',array2tableTL(xlscell,'ACTION','CONDITION','ADD_LIST','DEL_LIST')) % [T,N,c]=SGreadtable('test.xls'), charcell2stringcellarray(T) % T=readtable('test.xls'), X=table2cell(T); charcell2stringcellarray(X) % % % See also: SGwritetable, array2tableTL, stringcellarray2charcell % % % Copyright 2023 Tim C. Lueth |
stringcellarray2charcell(ops)- converts xps cell list of string arrays into cell list of charchains |
 | % stringcellarray2charcell(ops) - converts xps cell list of string arrays into cell list of charchains % (by Tim Lueth, VLFL-Lib, 2023-DEZ-11 as class: ARTIFICIAL INTELLIGENCE) % % RESULT IS LIKE: {'"space on a" "space on c" "a on b"' } % % the current XPS format is a cell lits of string arrays that cannot be % written in a n excel file without problems. Thid fnctn converts the % cell list of string arrays into a cell list of charchains (Status of: % 2023-12-12) % % Introduced first in SolidGeometry 5.4 % % See also: SGwritetable, array2tableTL, charcell2stringcellarray % % zzz=stringcellarray2charcell(ops) % === INPUT PARAMETERS === % ops: % === OUTPUT RESULTS ====== % zzz: % % EXAMPLE: % [ops,start, goal]=XPSblocksworld % stringcellarray2charcell(ops); xlscell=ans % SGwritetable('test.xls',array2tableTL(xlscell,'ACTION','CONDITION','ADD_LIST','DEL_LIST')) % % See also: SGwritetable, array2tableTL, charcell2stringcellarray % % % Copyright 2023 Tim C. Lueth |
xpstrings2cells(sss)- converts a char chain with quation mark separated sentences into a cell list of character chains |
 | % xpstrings2cells(sss) - converts a char chain with quation mark separated sentences into a cell list of character chains % (by Tim Lueth, VLFL-Lib, 2023-DEZ-11 as class: ARTIFICIAL INTELLIGENCE) % % RESULT IS LIKE: {'space on a'} {'a on table'} {'space on b'} % % This fnctn may accelerate the XPSEQS concept at a later stage. % fnctns such as contains work on charchain level % contains(xpstrings2cells(zzz),unsortrows(xpstrings2cells('"c on % table"'))') % fnctns such as ismember work on cell level (Status of: 2023-12-12) % % Introduced first in SolidGeometry 5.4 % % See also: xpstrings2cells, XPcells2strings % % ccc=xpstrings2cells(sss) % === INPUT PARAMETERS === % sss: sentences separate by quotation marks such as '"a on b" "b on c"' % === OUTPUT RESULTS ====== % ccc: cell list of sentences such as [{'space on a'} {'a on table'}] % % EXAMPLE: % sss='"space on a" "a on table" "space on b"' % xpstrings2cells(sss); ccc=ans % % % See also: xpstrings2cells, XPcells2strings % % % Copyright 2023 Tim C. Lueth |
xpcells2strings(ccc)- converts cell list of character chains into one charchain of quotation marks separated sentences |
 | % xpcells2strings(ccc) - converts cell list of character chains into one charchain of quotation marks separated sentences % (by Tim Lueth, VLFL-Lib, 2023-DEZ-11 as class: ARTIFICIAL INTELLIGENCE) % % RESULT IS LIKE: '"space on a" "a on table" "space on b" "b on table"' % % This fnctn may accelerate the XPSEQS concept at a later stage. % fnctns such as contains work on charchain level % contains(xpstrings2cells(zzz),unsortrows(xpstrings2cells('"c on % table"'))') % fnctns such as ismember work on cell level (Status of: 2023-12-12) % % Introduced first in SolidGeometry 5.4 % % See also: xpstrings2cells % % sss=xpcells2strings(ccc) % === INPUT PARAMETERS === % ccc: cell list of sentences such as [{'space on a'} {'a on table'}] % === OUTPUT RESULTS ====== % sss: sentences separate by quotation marks % % EXAMPLE: % ccc=[{'space on a'} {'a on table'} {'space on b'}] % sss='"space on a" "a on table" "space on b" "b on table" "space on c" "c on table"' % xpcells2strings(ccc); sss=ans; % % % See also: xpstrings2cells % % % Copyright 2023 Tim C. Lueth |
stringpatternpermute(equat,symb,samp)- creates symbol permutation for string pattern equations |
 | % stringpatternpermute(equat,symb,samp) - creates symbol permutation for string pattern equations % (by Tim Lueth, VLFL-Lib, 2023-DEZ-07 as class: ARTIFICIAL INTELLIGENCE) % % Flight back from Hefei to Munich (Status of: 2023-12-08) % % Introduced first in SolidGeometry 5.4 % % See also: cell2strarr, strarr2cell % % [VV,LL,CC]=stringpatternpermute(equat,symb,samp) % === INPUT PARAMETERS === % equat: string array of equation % symb: string array of symbol names % samp: cell list of samples for each symbol % === OUTPUT RESULTS ====== % VV: permutation of the string pattern equations % LL: permutation of unique symbols % CC: index of LL that has been used for VV % % EXAMPLE: % stringpatternpermute("$A on $B",["$A" "$B"],{["TIM" "BOOK"]; ["SHELF" "BED"]}) % stringpatternpermute(["$A on $B" "$A buys $B"],["$A" "$B"],{["TIM" "BOOK"]; ["SHELF" "BED"]}) % stringpatternpermute(["$A on $B" "$A buys $B"],["$A" "$B"],{["TIM" "BOOK"]; ["SHELF" "BED"]}); cell2strarr(ans) % stringpatternpermute(["$A on $B" "$A buys $B"],["$A" "$B"],{["TIM" "BOOK"]; ["SHELF" "BED" "TIM"]}) % [a,b,c]=stringpatternpermute(["$A on $B" "$A buys $B"],["$A" "$B"],{["TIM" "BOOK"]; ["TIM" "SHELF" "BED" "TIM"]}) % % See also: cell2strarr, strarr2cell % % % Copyright 2023 Tim C. Lueth |
strarr2cell(strarr,rememt)- converts a string array into a cell list of string |
 | % strarr2cell(strarr,rememt) - converts a string array into a cell list of string % (by Tim Lueth, VLFL-Lib, 2023-DEZ-07 as class: ARTIFICIAL INTELLIGENCE) % % Flight back from Hefei to Munich (Status of: 2023-12-07) % % Introduced first in SolidGeometry 5.4 % % See also: cell2strarr, stringpatternpermute % % ccc=strarr2cell(strarr,[rememt]) % === INPUT PARAMETERS === % strarr: stringarray % rememt: if true, empty entries are removed % === OUTPUT RESULTS ====== % ccc: cell list with string entries % % EXAMPLE: % clc; yyy={["c" "table" "space" "b" "a"];["ontop" "under" "between" ]} % cell2strarr(yyy); xxx=ans, strarr2cell(xxx) % cell2strarr(yyy); xxx=ans, strarr2cell(xxx,true) % no empty entries % cell2strarr(yyy); xxx=ans, strarr2cell(xxx,true); zzz=ans, permutevarargin(zzz{:}) % no empty entries % % See also: cell2strarr, stringpatternpermute % % % Copyright 2023 Tim C. Lueth |
cell2strarr(ccc,joinch)- converts string arrays in cell lines into a string array |
 | % cell2strarr(ccc,joinch) - converts string arrays in cell lines into a string array % (by Tim Lueth, VLFL-Lib, 2023-DEZ-07 as class: ARTIFICIAL INTELLIGENCE) % % Flight back from Hefei to Munich (Status of: 2023-12-07) % % Introduced first in SolidGeometry 5.4 % % See also: strarr2cell, stringpatternpermute % % stra=cell2strarr(ccc,[joinch]) % === INPUT PARAMETERS === % ccc: cell list of string lines % joinch: if a joint char is used the string array has only one column % === OUTPUT RESULTS ====== % stra: stringarray % % EXAMPLE: % yyy={["c" "table" "space" "b" "a"];["c" "table" "space" ]} % cell2strarr(yyy) % 2 x 5 array % cell2strarr(yyy," ") % 2 x 1 array % % % See also: strarr2cell, stringpatternpermute % % % Copyright 2023 Tim C. Lueth |
varsofstringpattern(cond)- finds all the symbolvariables in a string array |
 | % varsofstringpattern(cond) - finds all the symbolvariables in a string array % (by Tim Lueth, VLFL-Lib, 2023-DEZ-03 as class: ARTIFICIAL INTELLIGENCE) % % waiting for the flight to Bejing CA962. (Status of: 2023-12-08) % % Introduced first in SolidGeometry 5.4 % % See also: stringpatterncondition, XPSEQS % % [var,patt]=varsofstringpattern(cond) % === INPUT PARAMETERS === % cond: string array with terms that use $XXX as variable name % === OUTPUT RESULTS ====== % var: string array with variable Name including %char % patt: % % EXAMPLE: % varsofstringpattern(["space on $A", "space on $C", "$A on $B"]) % % See also: stringpatterncondition, XPSEQS % % % Copyright 2023 Tim C. Lueth |
XPSconditionfindneval(cond,state,VLIST)- creates all combinations of a variable based CONDITION that could fit a fact list CONDITION |
 | % XPSconditionfindneval(cond,state,VLIST) - creates all combinations of a variable based CONDITION that could fit a fact list CONDITION % (by Tim Lueth, VLFL-Lib, 2023-NOV-30 as class: ARTIFICIAL INTELLIGENCE) % % 1st name was "stringpatterncondition" % This fnctn checks whether a list of conditions (COND is a fact string % array with variables $) can occur or is applicable in a given state % (STATE is a fact string array without variables). If the list COND is % applicable in STATE with several different variable assignments, all % applicable combinations of the variables are delivered and further % variable-based lists can be instantiated with the instantiated % variables. % % XPpermute(' ',["a" "b"],["C" "D"]) % Equations, or systems of equations, that are based on the form "$A on % $B" must be limited in their scope of application in some way so that % the recursion or planning comes to an end. For example, NOT (table on % ANY)For example, by specifying the set of allowed or disallowed symbols % % This fnctns as part of the general Problem solver can also be used as % logical reasoning % cond = condition % state = state % VLIST = everything that also is valid under this condition (Status of: % 2024-01-26) % % Introduced first in SolidGeometry 5.4 % % See also: stringpatterncompare, stringpatternreplace, XPSEQS % % LITERATURE: % - Norvig, Peter (1991): Paradigms of Artificial Intelligence % Programming, Morgan Kaufmann Publisher, San Mateo, CA, USA % % [RLIST,VLIST,VARS,INST,SYMS]=XPSconditionfindneval(cond,state,[VLIST]) % === INPUT PARAMETERS === % cond: string array of conditions with Variables of Type $Str % state: string array of facts % VLIST: Additional string arrys with variables % === OUTPUT RESULTS ====== % RLIST: all possible condition strings that are part of state % VLIST: all possible additional condition strings that use the same % combination of VARS/INST % VARS: all used symbol names in cond % INST: all symbol combinations used as variables that fullfill the % condition in state % SYMS: string array of all samples % % EXAMPLE: % [~,start,goal]=XPSblocksworld; % clc;XPSconditionfindneval(["space on $A", "space on $C", "$A on $B"],start) % clc;XPSconditionfindneval([ "space on $A", "space on $C", "$A on $B"],start,["move $A from $B to $C"], ["$A on $C", "space on $B"], ["$A on $B", "space on $C"]) % clc;XPSconditionfindneval(["$A on $B"],["space on a", "a on b", "b on c", "c on table", "space on table"]) % 5 Solutions for "$A on $B" % clc;XPSconditionfindneval(["space on $A" "$A on $B"],["space on a", "a on b", "b on c", "c on table", "space on table"]) % 1 Solutions for "$A on $B" % clc;XPSconditionfindneval(["space on $A" "$B on $A"],["space on a", "a on b", "b on c", "c on table", "space on table"]) % 1 Solutions for "$B on $A" % clc;XPSconditionfindneval(["$A on $B"],["space on a", "a on b", "b on c", "c on table", "space on table"],["$A loves $B"]) % 5 Solutions that create lists % % See also: stringpatterncompare, stringpatternreplace, XPSEQS % % % Copyright 2023-2024 Tim C. Lueth |
stringpatterncompare(pattern,txt)- compares strings including variable strings |
 | % stringpatterncompare(pattern,txt) - compares strings including variable strings % (by Tim Lueth, VLFL-Lib, 2023-NOV-30 as class: ARTIFICIAL INTELLIGENCE) % % Introduced first in SolidGeometry 5.4 % % See also: stringpatternreplace, XPSGPS, XPSGPSEQ, stringpatterncondition % % PAR=stringpatterncompare(pattern,txt) % === INPUT PARAMETERS === % pattern: pattern such as "move $A from $B to $C" % txt: text to analyze such as "move A from B to C" % === OUTPUT RESULTS ====== % PAR: List of parameters % % EXAMPLE: % stringpatterncompare("move A from B to C", "move A from B to C") % identical % stringpatterncompare("move A from B to C", "move X from Y to C") % different % stringpatterncompare("move $A from $B to C", "move X from Y to C") % identical % stringpatterncompare("move $A from $B to $C", "move Tim from work to Home") % identical % stringpatterncompare("move $A from $B to $C", "move $A from work to Home") % empty results % % % See also: stringpatternreplace, XPSGPS, XPSGPSEQ, stringpatterncondition % % % Copyright 2023 Tim C. Lueth |
XPSblocksworldequation- RULES for the XPSEQS blockworld problem |
 | % XPSblocksworldequation - RULES for the XPSEQS blockworld problem % (by Tim Lueth, VLFL-Lib, 2023-NOV-30 as class: ARTIFICIAL INTELLIGENCE) % % This creates simple the test data for the GPS=AI with respect to to % Peter Norvig (1991) using the STRIPS Rules % % It can be used to define similar knowledge action rules (Status of: % 2024-02-03) % % Introduced first in SolidGeometry 5.4 % % See also: XPSGPS, XPSEQS, XPSblocksworld, XPSslidingpuzzle, XPSlawcase % % LITERATURE: % - Norvig, Peter (1991): Paradigms of Artificial Intelligence % Programming, Morgan Kaufmann Publisher, San Mateo, CA, USA % % [ops,start,finish]=XPSblocksworldequation % === OUTPUT RESULTS ====== % ops: cell list [n x 4] describing action-name, precondition, add-state, % diff-state % start: string array describing the start state % finish: string array describing the final state % % EXAMPLE: [ops,start,finish]=XPSblocksworldequation % Example efinitions of operators start-state and goal-state % XPSGPS(ops, start, finish) % % % See also: XPSGPS, XPSEQS, XPSblocksworld, XPSslidingpuzzle, XPSlawcase % % % Copyright 2023-2024 Tim C. Lueth |
XPSEQS(ops,start,finish,"debug","first")- Expert System implementing the first General Problem Solver (AI Programm) |
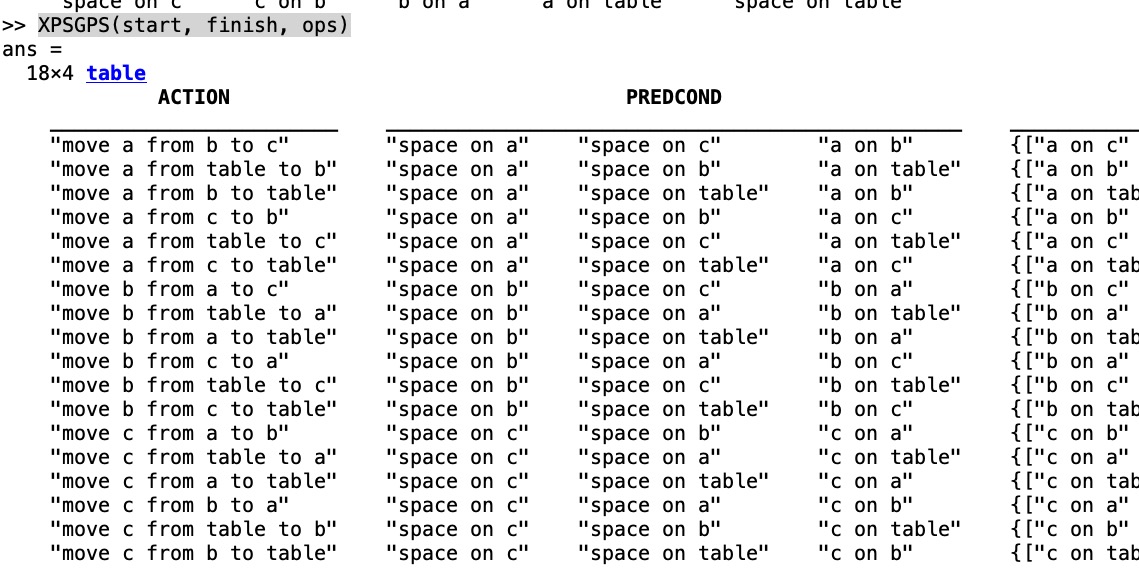 | % XPSEQS(ops,start,finish,"debug","first") - Expert System implementing the first General Problem Solver (AI Programm) % (by Tim Lueth, VLFL-Lib, 2023-NOV-29 as class: ARTIFICIAL INTELLIGENCE) % % Order of parameters changed in Feb 2024 % In contrast to XPSGPS, this fnctn XPSEQS supports also equations based % on $Var symbols. the delete list is applied before the add list, to % allow the termination by adding removed facts % IF COND(STATE)==TRUE; NEWSTATE = [SETDIFF(STATE, DELLIST),ADDLIST) % Since 2024, also Equations or matlab code can be evaluated such as % "$A==4" or "$L==$R-1" % (Status of: 2024-01-20) % % Introduced first in SolidGeometry 5.4 % % See also: XPSblocksworld, XPSGPS, XPSconditionfindneval, % XPSslidingpuzzle, XPSlawcase % % LITERATURE: % - Norvig, Peter (1991): Paradigms of Artificial Intelligence % Programming, Morgan Kaufmann Publisher, San Mateo, CA, USA % % [solut,endstate,solutstates,plan]=XPSEQS([ops,start,finish,"debug","fir % st"]) % === INPUT PARAMETERS === % ops: cell list [n x 4] describing action-name, precondition, add-state, % diff-state % start: string array describing the start state % finish: string array describing the final state % "debug": if used, the progress is shown % "first": if used, the first solution is returned % === OUTPUT RESULTS ====== % solut: solutions % endstate: end state of the solutioin % solutstates: state change of the solutions % plan: all plans generated % % EXAMPLE: % clc; [ops,start,finish]=XPSblocksworld % Example efinitions of operators start-state and goal-state % opsnew={["move $A from $B to $C"], ["space on $A", "space on $C", "$A on $B"], ["$A on $C", "space on $B" "space on table"], ["$A on $B", "space on $C"]} % ACTION, COND, ADD, DEL % XPSEQS(ops, start, finish); % XPSEQS(opsnew, start, finish); % % % See also: XPSblocksworld, XPSGPS, XPSconditionfindneval, % XPSslidingpuzzle, XPSlawcase % % % Copyright 2023-2024 Tim C. Lueth |
XPSblocksworld- Expert System implementing the first General Problem Solver (AI Programm) |
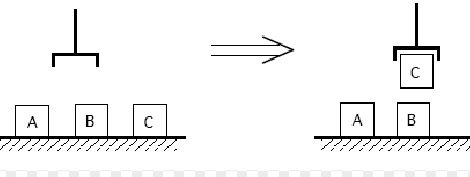 | % XPSblocksworld - Expert System implementing the first General Problem Solver (AI Programm) % (by Tim Lueth, VLFL-Lib, 2023-NOV-25 as class: ARTIFICIAL INTELLIGENCE) % % This creates simple the test data for the GPS=AI with respect to to % Peter Norvig (1991) % % It can be used to define similar knowledge action rules (Status of: % 2024-01-10) % % Introduced first in SolidGeometry 5.4 % % See also: XPSGPS, XPSEQS, XPSblocksworldequation, XPSslidingpuzzle, % XPSlawcase % % LITERATURE: % - Norvig, Peter (1991): Paradigms of Artificial Intelligence % Programming, Morgan Kaufmann Publisher, San Mateo, CA, USA % % [ops,start,goal]=XPSblocksworld % === OUTPUT RESULTS ====== % ops: cell list [n x 4] describing action-name, precondition, add-state, % diff-state % start: string array describing the start state % goal: string array describing the final state % % EXAMPLE: % [ops,start,finish]=XPSblocksworld % Example efinitions of operators start-state and goal-state % XPSGPS(ops,start, finish) % % % See also: XPSGPS, XPSEQS, XPSblocksworldequation, XPSslidingpuzzle, % XPSlawcase % % % Copyright 2023-2024 Tim C. Lueth |
XPSGPS(ops,start,finish)- Expert System implementing the first General Problem Solver (AI Programm) using STRIPS |
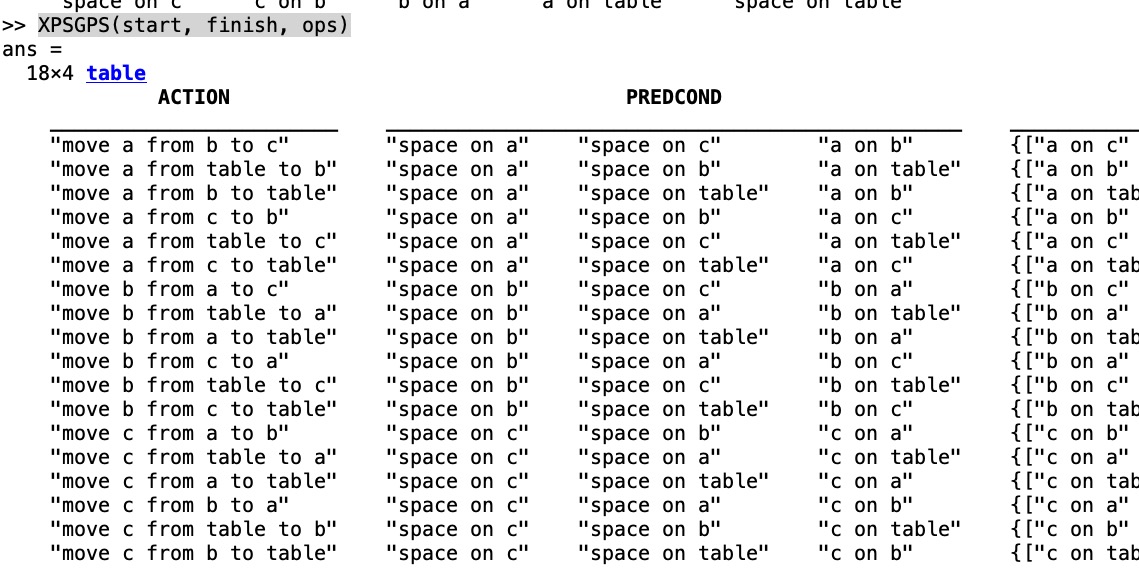 | % XPSGPS(ops,start,finish) - Expert System implementing the first General Problem Solver (AI Programm) using STRIPS % (by Tim Lueth, VLFL-Lib, 2023-NOV-24 as class: ARTIFICIAL INTELLIGENCE) % % This is a tutorial how to design general problem solver expert systems, % that use % 1st - states as array of strings % 2nd - operators as cell list of actions, predconditions, add-states and % delete-states % All states are strings not chars % State list are arrays of strings % (Status of: 2023-12-09) % % Introduced first in SolidGeometry 5.4 % % See also: XPSblocksworld, XPSEQS % % LITERATURE: % - Norvig, Peter (1991): Paradigms of Artificial Intelligence % Programming, Morgan Kaufmann Publisher, San Mateo, CA, USA % % [solut,plan]=XPSGPS([ops,start,finish]) % === INPUT PARAMETERS === % ops: cell list [n x 4] describing action-name, precondition, add-state, % diff-state % start: string array describing the start state % finish: string array describing the final state % === OUTPUT RESULTS ====== % solut: solution - successful plans % plan: complete plan list % % EXAMPLE: % clc; [ops,start,finish]=XPSblocksworld % Example efinitions of operators start-state and goal-state % XPSGPS(ops ,start, finish) % % % % See also: XPSblocksworld, XPSEQS % % % Copyright 2023-2024 Tim C. Lueth |
XPpermute(sc,lists)- Auxiliary fnct to create permutation of sets |
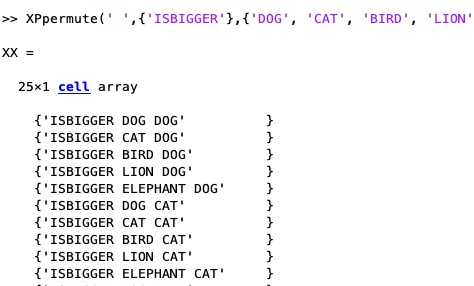 | % XPpermute(sc,lists) - Auxiliary fnct to create permutation of sets % (by Tim Lueth, VLFL-Lib, 2023-NOV-17 as class: ARTIFICIAL INTELLIGENCE) % % Introduced first in SolidGeometry 5.4 % % See also: permutevarargin, join, XPS % % LITERATURE: % - Norvig, Peter (1991): Paradigms of Artificial Intelligence % Programming, Morgan Kaufmann Publisher, San Mateo, CA, USA % % LL=XPpermute([sc,lists]) % === INPUT PARAMETERS === % sc: separator; default is '' % lists: cell lists of arguments % === OUTPUT RESULTS ====== % LL: cell list of all combinations of the permutation % % EXAMPLE: % XPpermute(' ',{'ISBIGGER'},{'DOG', 'CAT', 'BIRD', 'LION', 'ELEPHANT'}, {'DOG', 'CAT', 'BIRD', 'LION', 'ELEPHANT'}); XX=ans % % See also: permutevarargin, join, XPS % % % Copyright 2023 Tim C. Lueth |
permutezzlist(zzlist)- creates multidimensional index sequences for testing or other purposes |
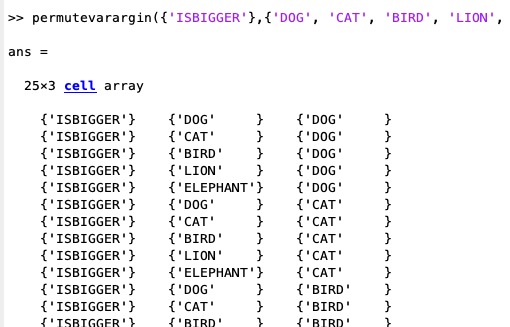 | % permutezzlist(zzlist) - creates multidimensional index sequences for testing or other purposes % (by Tim Lueth, VLFL-Lib, 2023-NOV-17 as class: AUXILIARY PROCEDURES) % % much faster than permutevector, similar but more generic than % indexvariant (Status of: 2023-11-17) % % Introduced first in SolidGeometry 5.4 % % See also: permutevector, indexvariant, permutevarargin, join, split, % XPpermute % % LITERATURE: % - Norvig, Peter (1992): Paradigms of Artificial Intelligence % Programming, Morgan Kaufmann Publisher, San Mateo, CA, USA % % zz=permute[zzlist]([zzlist]) % === INPUT PARAMETERS === % zzlist: row or col vector; default is [1 2 3] % === OUTPUT RESULTS ====== % zz: index field [numel(vec)^dim x dim] % % EXAMPLE: % permutevarargin({'a' 'b' 'c' 'd'}, {'X' 'Y'} ,{1 2 3}) % permutevarargin({'a' 'b' 'c' 'd'}, {'X' 'Y'} ,{'1' '2' '3'}) % permutevarargin({'a' 'b' 'c' 'd'}, {'X' 'Y'} ,{'1' '2' '3'}); XX=ans, join(XX,'-') % permutevarargin({'a' 'b' 'c' 'd'}, {'X' 'Y'} ,{'1' '2' '3'}); XX=ans, cell2dataset(XX,'VarNames' {'FUNC','PAR1','PAR2'}) % permutevarargin([1 2 3],[4 5 6],[7 8 9]) % permutevarargin({'ISBIGGER'},{'DOG', 'CAT', 'BIRD', 'LION', 'ELEPHANT'}, {'DOG', 'CAT', 'BIRD', 'LION', 'ELEPHANT'}) % % See also: permutevector, indexvariant, permutevarargin, join, split, % XPpermute % % % Copyright 2023 Tim C. Lueth |
unsortrows(A)- swaps many different rows of a matrix |
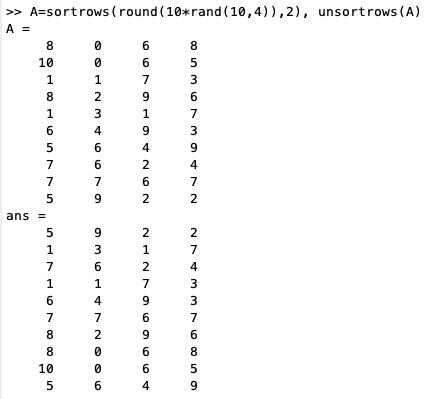 | % unsortrows(A) - swaps many different rows of a matrix % (by Tim Lueth, VLFL-Lib, 2023-NOV-03 as class: AUXILIARY PROCEDURES) % % same as ELunsort (Status of: 2023-11-03) % % Introduced first in SolidGeometry 5.4 % % See also: ELunsort, sortrows, unsortNaN % % A=unsortrows(A) % === INPUT PARAMETERS === % A: Original matrix % === OUTPUT RESULTS ====== % A: unosrted matrix, randomly exchnanged rows % % EXAMPLE: % A=sortrows(round(10*rand(10,4)),2), unsortrows(A) % % % See also: ELunsort, sortrows, unsortNaN % % % Copyright 2023 Tim C. Lueth |
SGbraitenbergvehicle(BLH,COL,NAM)- creates a simple solid similar to the vehicles of von Braitenberg |
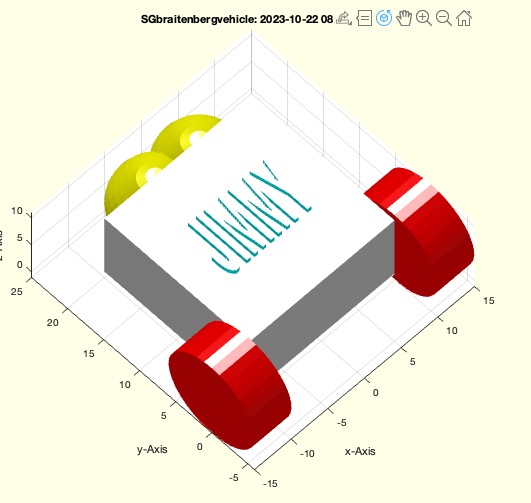 | % SGbraitenbergvehicle(BLH,COL,NAM) - creates a simple solid similar to the vehicles of von Braitenberg % (by Tim Lueth, VLFL-Lib, 2023-OKT-22 as class: PARAMETRIC DESIGN) % % The center is between the wheels (Status of: 2023-10-22) % % Introduced first in SolidGeometry 5.4 % % See also: sprintftext, SGofCPLcommand, SGtextstamp, TofWheel, % VehicleLearning.mlx % % SG=SGbraitenbergvehicle([BLH,COL,NAM]) % === INPUT PARAMETERS === % BLH: [Widht length height]l default is [30 40 10] % COL: Optional colors for sensor wheel text; default is [yrc] % NAM: optional name ontop; default is empty; % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGbraitenbergvehicle([20 20 10],'yr','JIMMY'); SGR=ans; % TR=eye(3); hr=[]; % for i=1:100 % d=rand(1,2)/5; % robot creates random numbers for the wheel movement % % Create robot animation % TR=TR*TofWheel(30,d); delete(hr); hr=SGplotalpha(SGtransT(SGR,T3ofT2(TR))); % axis tight; view(-30,30); drawnow; % end % % See also: sprintftext, SGofCPLcommand, SGtextstamp, TofWheel, % VehicleLearning.mlx % % % Copyright 2023 Tim C. Lueth |
fcostbenefit(c,r,t)- cost or benefit fnct |
 | % fcostbenefit(c,r,t) - cost or benefit fnct % (by Tim Lueth, VLFL-Lib, 2023-OKT-14 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.4 % % See also: VehicleReinforce.mlx % % [ff,PL,SG]=fcostbenefit([c,r,t]) % === INPUT PARAMETERS === % c: [plateau-width center-shift center-value]; default is [0 0 1] % r: [ramp width and minimal value[ ;default is [2 0] % t: type of functiopn "lin", "atan", "bell"; default is bell (1/1+x^2) % === OUTPUT RESULTS ====== % ff: handle to cost equation % PL: Point list of fnctn % SG: Solid Geometry of fnctn % % EXAMPLE: % fcostbenefit([10 0],10,'bell'); ff=ans; axis equal, ff(4) % fcostbenefit([10 2],10,'atan'); ff=ans; axis equal, ff(8) % fcostbenefit([10 2],10,'bell'); ff=ans; axis equal, ff(8) % fcostbenefit([1 4],2,'bell'); ff=ans; axis normal; ff(10) % % See also: VehicleReinforce.mlx % % % Copyright 2023 Tim C. Lueth |
SGof2Dfunc(ff,ax,res,D)- creates a surface or a solid of a 1D or 2D fnct |
 | % SGof2Dfunc(ff,ax,res,D) - creates a surface or a solid of a 1D or 2D fnct % (by Tim Lueth, VLFL-Lib, 2023-OKT-14 as class: SURFACES) % % Introduced first in SolidGeometry 5.4 % % See also: SGofGeoTIFF, SGofSurface, VLwarpgrid, FLofVLmeshgrid % % SG=SGof2Dfunc([ff,ax,res,D]) % === INPUT PARAMETERS === % ff: handle to the fnctn; default is @sin % ax: axis [xmin xmax ymin ymax]; default is [-10 10 -10 10] % res: step size; default is max(dy,dy)/99; % D: Socket height; default is '' ==> only surface % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGof2Dfunc(@cos,[-pi 2*pi -pi 3*pi],.1); SG=ans; % creates just the surface without thickness % SGofSurface(SG.VL,SG.FL,0.5) % creates a solid from the surface % % SGof2Dfunc(@cos,[-pi 2*pi -pi 3*pi],.1,0) % creates a solid with no socket % SGof2Dfunc(@cos,[-pi 2*pi -pi 3*pi],.1,1) % creates a solid plus socket % % zzz=@(x,y) x+y % SGof2Dfunc(zzz,[-pi 2*pi -pi 3*pi],.1,1) % creates a solid plus socket % SGof2Dfunc(str2func('@(x,y)x*x-y*y'),[-1 1 -1 1],.1,1) ;SS=ans; % creates a solid plus socket % view(0,90); viewsmooth(-30,30,200) % % SGof2Dfunc(str2func('@(x,y)x*x-y*y'),[-1 1 -1 1],.01) ;SS=ans; % SGofSurface(SS,'',.3) % % % See also: SGofGeoTIFF, SGofSurface, VLwarpgrid, FLofVLmeshgrid % % % Copyright 2023-2024 Tim C. Lueth |
PLwrench(D,n)- exactly the same as PLinbus |
 | % PLwrench(D,n) - exactly the same as PLinbus % (by Tim Lueth, VLFL-Lib, 2023-OKT-13 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.4 % % See also: PLhexalobular, PLinbus, PLcircle, PLcircseg, PLevolvente, % PLgearDIN, PLhelix, PLkidney, PLrand, PLspiral, PLsquare, PLstar, % PLcircleoval, PLtubbing, PLarrow, CPLcirclesofPL % % [PL,Rm]=PLwrench([D,n]) % === INPUT PARAMETERS === % D: DIAMETER NOT RADIUS! default is 1/4 Inch % n: number of faces; default is 6 % === OUTPUT RESULTS ====== % PL: Point list % Rm: Radius of circle for PLcircle % % EXAMPLE: % PLwrench(10) % % See also: PLhexalobular, PLinbus, PLcircle, PLcircseg, PLevolvente, % PLgearDIN, PLhelix, PLkidney, PLrand, PLspiral, PLsquare, PLstar, % PLcircleoval, PLtubbing, PLarrow, CPLcirclesofPL % % % Copyright 2023 Tim C. Lueth |
SGjuicerAdapter(Do,Di)- creates a spare part for a BOSCH juicer |
 | % SGjuicerAdapter(Do,Di) - creates a spare part for a BOSCH juicer % (by Tim Lueth, VLFL-Lib, 2023-OKT-13 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGbookwedge, SGshieldbase % % SGjuicerAdapter([Do,Di]) % === INPUT PARAMETERS === % Do: Outer Diameter % Di: Inner Diameter % % See also: SGbookwedge, SGshieldbase % % % Copyright 2023 Tim C. Lueth |
TofWheel(D,w)- returns a HT matrix for a 2 wheel kinematic movement |
 | % TofWheel(D,w) - returns a HT matrix for a 2 wheel kinematic movement % (by Tim Lueth, VLFL-Lib, 2023-OKT-10 as class: KINEMATICS AND FRAMES) % % USE CAREFULLY: TofWheel was not being tested extensively % % Used in Braitenberg vehicle examples (Status of: 2023-10-12) % % Introduced first in SolidGeometry 5.4 % % See also: TofDPhi, TofDPhiH % % [TS,PL,TR,TL]=TofWheel(D,[w]) % === INPUT PARAMETERS === % D: Distance between the two weels in x % w: movement in rad % === OUTPUT RESULTS ====== % TS: Center Frame after movement % PL: path of movement % TR: Frame of result of right wheel % TL: Frame of result of left wheel % % EXAMPLE: % TofWheel(30,[0 270]/180*pi) % % SGR=SGofCPLcommand("b 30 40,h 10, enter, sph 10, rel center, rel alignback 5, rel alignleft -2,swap, enter, sph 10, rel center, rel alignback 5, rel alignright -2,add, swap , add, enter, c 12, h 5,roty 90,rel alignbottom 1, rel alignleft 5, rel infront -5, add, enter, c 12, h 5,roty 90,rel alignbottom, rel alignright 5, rel alignfront, add"); % TR=eye(3) % for i=1:100 % d=rand(1,2)/5; % robot creates random numbers for the wheel movement % % Create robot animation % TR=TR*TofWheel(30,d); delete(hr); hr=SGplotalpha(SGtransT(SGR,T3ofT2(TR)),'g',0.5); % axis tight; view(-30,30); drawnow; % end % % % See also: TofDPhi, TofDPhiH % % % Copyright 2023 Tim C. Lueth |
SGshieldbase(ddd,rrr)- creates a shieldbase |
 | % SGshieldbase(ddd,rrr) - creates a shieldbase % (by Tim Lueth, VLFL-Lib, 2023-OKT-04 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.4 % % See also: SGbookwedge % % SG=SGshieldbase([ddd,rrr]) % === INPUT PARAMETERS === % ddd: [length widht height tickness]; default is [117 4 60 2] % rrr: [stand extension stand height]; default is [10 4] % === OUTPUT RESULTS ====== % SG: resulting solid % % See also: SGbookwedge % % % Copyright 2023 Tim C. Lueth |
