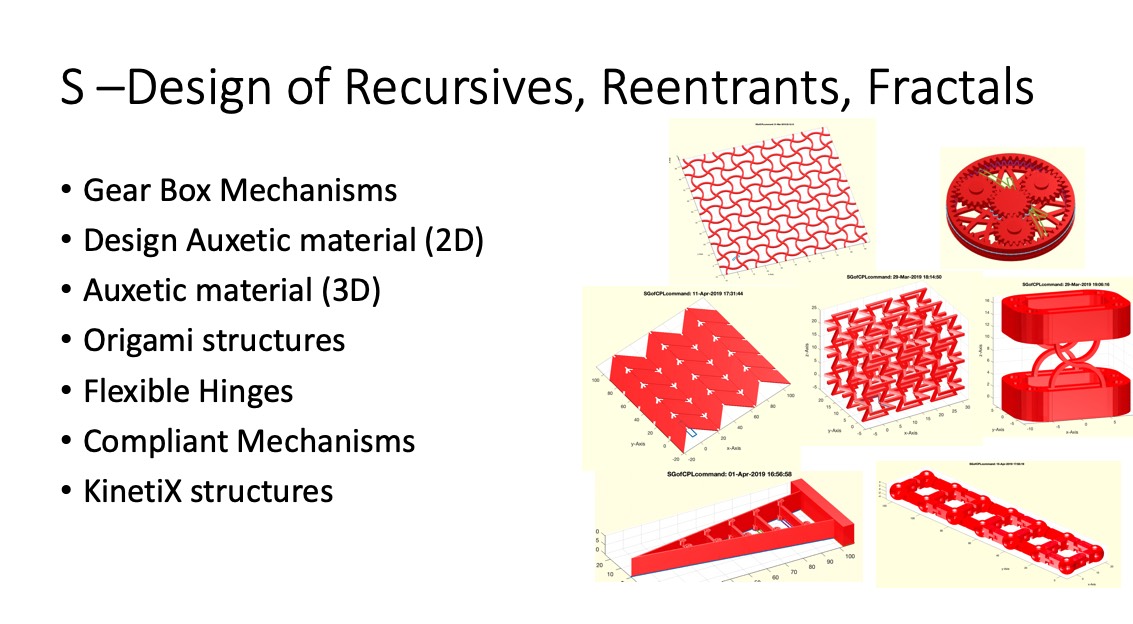
Solid Geometry Coding Language (SGCL)
Parallel to the SG-Lib Toolbox, since 2018 a "language" has also been developed with which mechanical constructions from geometric bodies and kinematic chains as well as their drives and controls can be "automatically" constructed using character strings. This idea should enable the development of intelligent robots by intelligent robots. Currently, there is a command in the SG-Lib with which a character string in the SGCL notation can be converted into a construction: SGofCPLcommand The language should also facilitate the 3D printing technology to help break through, since the 3D printers exist but the "Word" for "3D printer" is missing. To learn the language, I recommend downloading and viewing the tutorials listed on the left. For the tutorials A-D, the SG-Lib Rel. 4.5 is required. For tutorial E, the SG-Lib Rel. 4.6 is required.The following examples were generated by Yilun Sun:
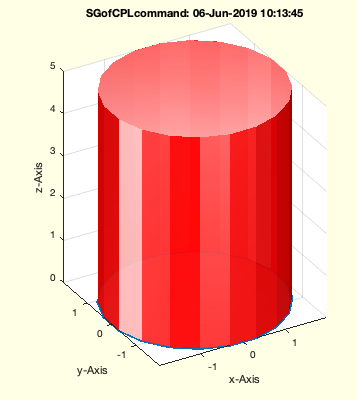
>> SGofCPLcommand('c 4,h 5')
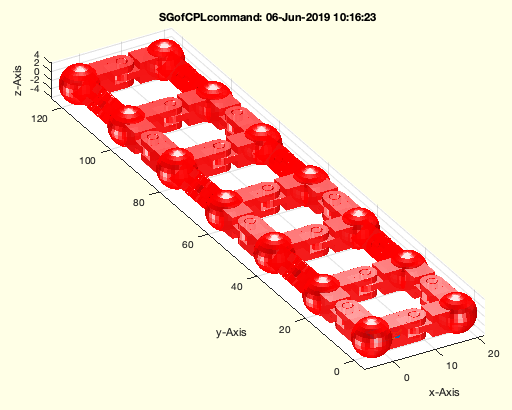
>> SGofCPLcommand(['b 5 5,h 4.5,roty 90,move -4.5 0 0,save B,enter,b 3 5,enter,d 5 1.5 0,+,h 1.5,save A,move 1.5 0 -2.5,dups ',...
'1 1 2 2,+,enter,d 2.5 3 0,h 10,move 0 0 -5,-,enter,load A,rotz 180,move 4.5 0 -0.75,enter,d 2 3 0,h 5,move 0 0 -2.5,+,+,',...
'enter,load B,move 10.5 -0.01 0,+,move 4.5 0 0,save C,dups 1 7 1 15,enter,load C,rotz 90,move -2.5 2.5 0,dups 2 1 1 15,du',...
'pg 1 3 1 40,+,enter,load C,rotx 45,rotz 90,move -2.5 22.5 0,enter,load C,rotx -45,rotz 90,move 17.5 22.5 0,+,dupg 1 3 1 ',...
'40,+,enter,sph 8.67,dup,rotx 180,+,move -2.5 0 0,dupg 2 7 1 20,cat'])
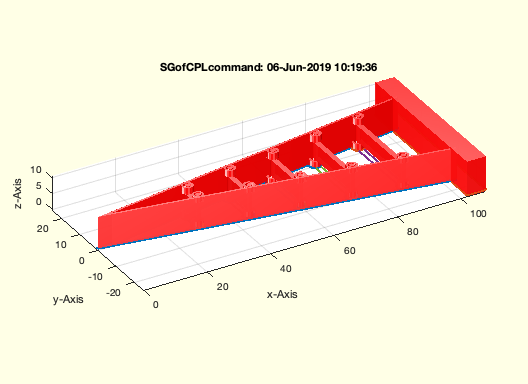
>> SGofCPLcommand(['cs 18 0 105 -9,dup,move 4.5 0,-,enter,d 1.5 30 -1.8,dupc 5 1 15,rot 9 0 0,+,enter,d 1.5 30 1.8,dupc 5 1 1',...
'5,rot -9 0 0,+,h 10,enter,d 3.48 30 -1.8,d 2.19 30 -1.8,dupc 5 1 15,rot 9 0 0,enter,d 3.48 30 1.8,d 2.19 30 1.8,dupc 5 1',...
' 15,rot -9 0 0,+,h 2,dups 1 1 2 6,+,enter,b 1.6 40,move 29.85 0,dupc 5 1 14.86,enter,cs 18 0 110 -9,move 12 0,&,h 5,move',...
' 0 0 2.5,+,enter,b 6 50,move 105 0,h 11,move 0 0 -0.5,cat'])