SGboolh(flag,A,B);- returns boolean operations on solid geometries using a heuristic |
 | % SGboolh(flag,A,B); - returns boolean operations on solid geometries using a heuristic % (by Tim Lueth, VLFL-Lib, 2018-NOV-06 as class: SURFACES) % % without any change of SGbool/SGbool5 (Aug 2017) this fnctn returns % quite useful results by avoiding numerical instabilities. (Status of: % 2018-11-07) % % Introduced first in SolidGeometry 4.3 % % See also: CSGsample, SGbool % % C=SGboolh(flag,A,B); % === INPUT PARAMETERS === % flag: '+', 'x', 'A' ,'B' % A: Solid A % B: Solid B % === OUTPUT RESULTS ====== % C: result of boolean operation % % EXAMPLE: % testfunctTL('[A,B]=CSGsample(#2); SGboolh(#1,A,B);','+xAB',1:10) % n=14; [A,B]=CSGsample(n); CSGsample(n) % SGboolh('+',A,B); SGcheckmeshlab(ans); % SGboolh('-',A,B); SGcheckmeshlab(ans); % SGboolh('A',A,B); SGcheckmeshlab(ans); % SGboolh('B',A,B); SGcheckmeshlab(ans); % % See also: CSGsample, SGbool % % % Copyright 2018 Tim C. Lueth |
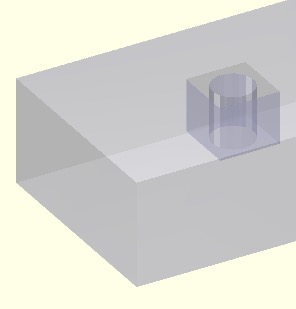
SGcutTCPL(SG,To,CPL)- punching: shoots a contour through a solid - same as SGcutTCPLthrough |
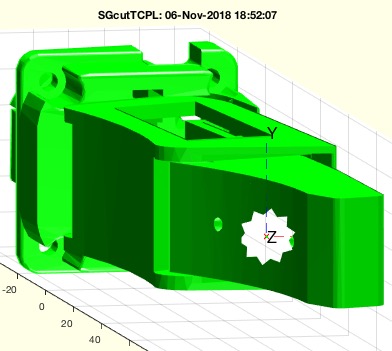 | % SGcutTCPL(SG,To,CPL) - punching: shoots a contour through a solid - same as SGcutTCPLthrough % (by Tim Lueth, VLFL-Lib, 2018-NOV-06 as class: SURFACES) % % ======================================================================= % OBSOLETE (2020-08-23) - USE 'SGpunchTCPLthrough % ' INSTEAD % ======================================================================= % % This fnctns works only for correct boolean merged solids! No open % boundaries et al. (Status of: 2020-01-09) % % Introduced first in SolidGeometry 4.3 % % See also: [ SGpunchTCPLthrough % ] ; SGcutT, BBofSGcutT, SGcut, SGcut2, SGcutBB, SGcutTd, % SGpunchTCPLfirstwall, SGpunchTCPLthrough, SGpunchhollowsolid % % [C,Ts,succ]=SGcutTCPL([SG,To,CPL]) % === INPUT PARAMETERS === % SG: Solid Geometry % To: Optional T frame % CPL: Closed Polygon Line % === OUTPUT RESULTS ====== % C: Resulting Solid % Ts: Frame for cutting in c direction % succ: flag for success % % EXAMPLE: % SGcutTCPL(SGsample(25),TofP([-4 -6 0]),[PLcircle(1,8);nan nan;PLcircle(0.5)]) % SGcutTCPL(SGsample(25),'',[PLcircle(1,8);nan nan;PLcircle(0.5)]) % % See also: [ SGpunchTCPLthrough % ] ; SGcutT, BBofSGcutT, SGcut, SGcut2, SGcutBB, SGcutTd, % SGpunchTCPLfirstwall, SGpunchTCPLthrough, SGpunchhollowsolid % % % Copyright 2018-2020 Tim C. Lueth |
CPLsweep(CPL,wt,cp,gw)- returns a swept contour |
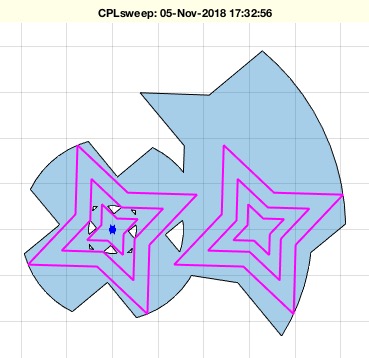 | % CPLsweep(CPL,wt,cp,gw) - returns a swept contour % (by Tim Lueth, VLFL-Lib, 2018-NOV-05 as class: CLOSED POLYGON LISTS) % % Contour required for creating revolute joints. % Tricky fnctn that rotates edges (Status of: 2019-03-30) % % Introduced first in SolidGeometry 4.3 % % See also: CPLconvexhull % % CPLN=CPLsweep(CPL,[wt,cp,gw]) % === INPUT PARAMETERS === % CPL: Closed polygon line % wt: angle w or [wmin wmax]; default is p/20 % cp: center point for rotation; default is 0 % gw: increase decrease contour; default is 0 % === OUTPUT RESULTS ====== % CPLN: Final contour % % EXAMPLE: % CPLsweep(CPLsample(14),[-pi/50 pi/4]); % CPLsweep(CPLsample(14),[-pi/50 pi/4],[15 0]); % CPLsweep(CPLsample(14),[-pi/50 pi/4],[0 15]); % % See also: CPLconvexhull % % % Copyright 2018-2021 Tim C. Lueth |
BBofSGcutT(SGx,Tx,z,d,ct)- returns the bounding box for a cutting frame |
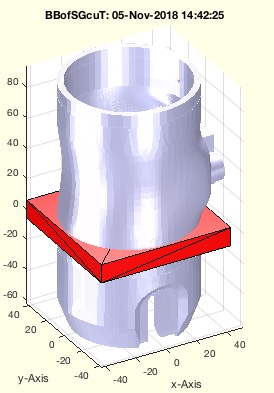 | % BBofSGcutT(SGx,Tx,z,d,ct) - returns the bounding box for a cutting frame % (by Tim Lueth, VLFL-Lib, 2018-NOV-05 as class: SURFACES) % % helpful and used in many cutting fnctn such as SGcutTcrossblade (Status % of: 2020-01-13) % % Introduced first in SolidGeometry 4.3 % % See also: BBui, SGcutT, TofPcam, SGcut, SGcut2, SGcutBB, SGcutT % % [BB,Ts,Tc,SGC,aew]=BBofSGcutT([SGx,Tx,z,d,ct]) % === INPUT PARAMETERS === % SGx: Solid Geoemtry % Tx: Cutting frame (cuts above z==0) % z: size [-z/2 +z/2] or [zmin zmax] % d: displacement to add to x and y values of BB; z unchanged % ct: default is '-a' in interactive mode % === OUTPUT RESULTS ====== % BB: Bounding box size % Ts: Cutting frame (if interactively used) on surface % Tc: Cutting Frame in center point % SGC: Cutted Solid Geometry of [zmin zmax] % aew: view angle in interactive mode % % EXAMPLE: % loadweb JACO_robot.mat % BBofSGcutT(JC0,eye(4),10); % BBofSGcutT(JC0,eye(4)); % BBofSGcutT(JC0); % BBofSGcutT; % % See also: BBui, SGcutT, TofPcam, SGcut, SGcut2, SGcutBB, SGcutT % % % Copyright 2018-2022 Tim C. Lueth |
SGcutend(SG,ez,d,expl);- returns a cutted object that is cuttet related to the BB |
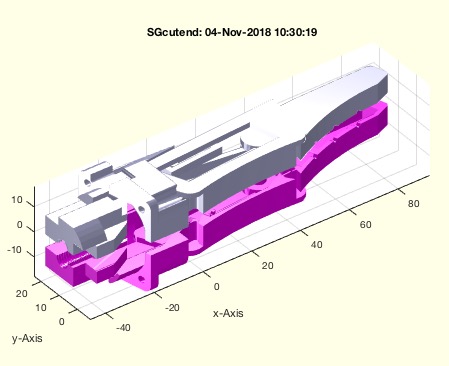 | % SGcutend(SG,ez,d,expl); - returns a cutted object that is cuttet related to the BB % (by Tim Lueth, VLFL-Lib, 2018-NOV-04 as class: SURFACES) % % Introduced first in SolidGeometry 4.3 % % See also: SGcutT, SGcutBB, SGcut % % [A,B,T]=SGcutend([SG,ez,d,expl]); % === INPUT PARAMETERS === % SG: SG if empty, SGofgca % ez: string as 'top,'bottom','behind','left',right','infront', 'x+', % 'x-, 'y+', 'y-', 'z+', 'z-', % d: distance from outside border % expl: explosition distance; Parts are separated; default is 0; % === OUTPUT RESULTS ====== % A: remaining solid (magenta) % B: removed solid (white) % T: Transformation matrix used % % EXAMPLE: % loadweb JACO_robot.mat % SGcutend(JCF,'top',10,10) % % See also: SGcutT, SGcutBB, SGcut % % % Copyright 2018-2020 Tim C. Lueth |
CPLconvexhull(CPL)- returns the convex hull for a CPL |
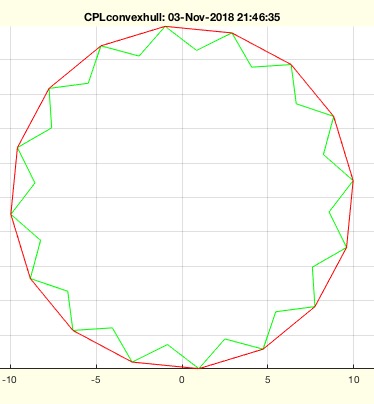 | % CPLconvexhull(CPL) - returns the convex hull for a CPL % (by Tim Lueth, VLFL-Lib, 2018-NOV-03 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.3 % % See also: delaunayofCPL, CPLconvexhulldelaunay % % CPLN=CPLconvexhull(CPL) % === INPUT PARAMETERS === % CPL: CPL % === OUTPUT RESULTS ====== % CPLN: convex hull % % EXAMPLE: % CPLconvexhull(PLstar(10)) % CPLconvexhull(CPLsample(14)) % delaunayofCPL(CPLsample(14)) % % % See also: delaunayofCPL, CPLconvexhulldelaunay % % % Copyright 2018-2020 Tim C. Lueth |
SGsurfaceselect(SG,fi,vi)- returns an isolated surface from a solid or SGofgca |
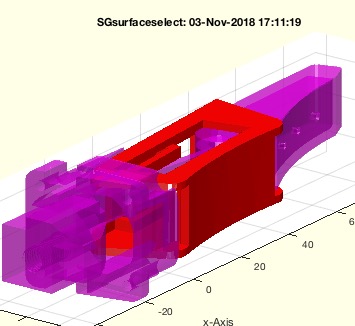 | % SGsurfaceselect(SG,fi,vi) - returns an isolated surface from a solid or SGofgca % (by Tim Lueth, VLFL-Lib, 2018-NOV-03 as class: SURFACES) % % DOES NOT WORK WITH NON MANIFOLD VERTICES - SGchecknonmanifoldvertices % (Status of: 2018-11-03) % % Introduced first in SolidGeometry 4.3 % % See also: SGsurface % % [SGI,SG,SIL,nfi]=SGsurfaceselect([SG,fi,vi]) % === INPUT PARAMETERS === % SG: Solid geometry or empty for gca % fi: facet index % vi: vertex index % === OUTPUT RESULTS ====== % SGI: Selected closed surface % SG: SG with reordered facet list % SIL: Surface index list for all surfaces % nfi: facet index with respect to % % EXAMPLE: % SGfigure; SGplot(JCF); SGsurfaceselect % SGsurfaceselect(JCF,[2803 2865 2870]) % SGsurfaceselect(JCF,1000) % SGsurfaceselect(JCF,'',2803) % % See also: SGsurface % % % Copyright 2018 Tim C. Lueth |
CPLbufferEdges(CPL,r,t)- returns contours with broken our rounded edges; |
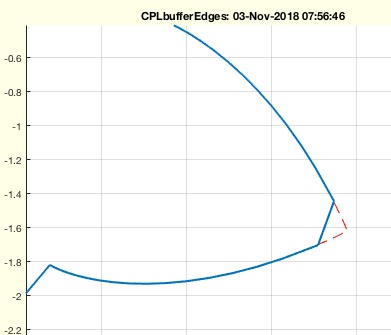 | % CPLbufferEdges(CPL,r,t) - returns contours with broken our rounded edges; % (by Tim Lueth, VLFL-Lib, 2018-NOV-03 as class: CLOSED POLYGON LISTS) % % ATTENTION = 'round' creates too many points wrt 3D printing % This fnctn based on CPLbuffer / polybuffer(polyshape) % Square doubles the numver of points; round at least triples the number % of points (Status of: 2018-11-03) % % Introduced first in SolidGeometry 4.3 % % See also: CPLradialEdges % % CPLN=CPLbufferEdges(CPL,[r,t]) % === INPUT PARAMETERS === % CPL: Closed Polygon Line % r: radius; default is 0.3 % t: 'square', 'round' % === OUTPUT RESULTS ====== % CPLN: % % EXAMPLE: % CPLbufferEdges([PLgearDIN(1,9);nan nan;PLcircle(.5)],.3,'round') % CPLbufferEdges([PLgearDIN(1,9);nan nan;PLcircle(.5)],.3,'square') % % See also: CPLradialEdges % % % Copyright 2018 Tim C. Lueth |
SGhelptext(helpstr,cname)- Writes a text annotation box on top of the current axis |
 | % SGhelptext(helpstr,cname) - Writes a text annotation box on top of the current axis % (by Tim Lueth, VLFL-Lib, 2018-NOV-02 as class: USER INTERFACE) % % This fnctn was already part of several interactive fnctn and is now % just a independent fnctn (Status of: 2018-11-02) % % Introduced first in SolidGeometry 4.3 % % See also: SGfigure, rotate3d, ginput, select3d % % h=SGhelptext(helpstr,[cname]) % === INPUT PARAMETERS === % helpstr: help string (yellow) % cname: caller string (red) % === OUTPUT RESULTS ====== % h: handle to text annotation % % EXAMPLE: % SGhelptext('Rotate and Press Enter','Solid Geometry Modeler'); a=ans % SGhelptext('',''); % % See also: SGfigure, rotate3d, ginput, select3d % % % Copyright 2018 Tim C. Lueth |
TofPcam(p,r,cp)- returns a transformation matrix using a vertex and a the current camera view |
 | % TofPcam(p,r,cp) - returns a transformation matrix using a vertex and a the current camera view % (by Tim Lueth, VLFL-Lib, 2018-NOV-02 as class: ANALYTICAL GEOMETRY) % % This fnctn is used to create interactively transformation matrices % ez = view direction % ey = cup of view % ex= ez cross ey % t = p; % SG-Lib 5.0 support mouse click selection (Status of: 2020-10-03) % % Introduced first in SolidGeometry 4.3 % % See also: Tofgca, Tofcam, camplot, camset, Tofgca, Tofcam, tcamera, % camofT % % [T,vi,fi,aew]=TofPcam([p,r,cp]) % === INPUT PARAMETERS === % p: 3D coordinate in the current view OR handle of a graphics object; % default is gca % r: 'a', 'c', 's' 'm' as axial coral or sagittal point; default is % 'm'ouse % cp: if true; cross section center; if false or numeric; surface plus % value % === OUTPUT RESULTS ====== % T: HT matrix with ez = view direction and ey = cup of view % vi: index of nearest vertex % fi: index of touched facet % aew: [view(1) view(2)] to restore camera view later % % EXAMPLE: % SGfigure(SGbox([30,20,10])); % shg; rotate3d on; pause; ginput(1); p=select3d; TofPcam(p), rotate3d on % cla; SGplotalpha(SG); TofPcam('','m'); % select z-axis (coronal, axial sagittal by mouse) % cla; SGplotalpha(SG); TofPcam('','m',-10); % select z-axis (coronal, axial sagittal by mouse) % % % See also: Tofgca, Tofcam, camplot, camset, Tofgca, Tofcam, tcamera, % camofT % % % Copyright 2018-2020 Tim C. Lueth |
exp_2018_11_02_bladecut(B)- EXPERIMENT SGpunchblade |
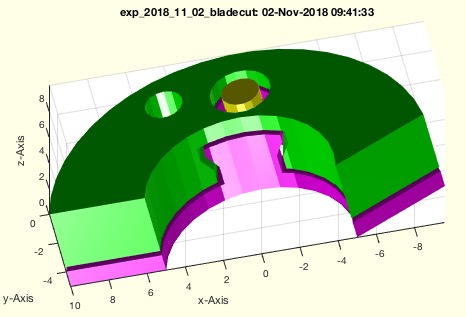 | % exp_2018_11_02_bladecut(B) - EXPERIMENT SGpunchblade % (by Tim Lueth, VLFL-Lib, 2018-NOV-02 as class: MODELING PROCEDURES) % % Shows how to separate a solid by a blade cut into several pieces. % In this case as puzzle cut, the Fischertechnik contour was used (Status % of: 2020-01-21) % % Introduced first in SolidGeometry 4.3 % % See also: SGbladeofPL, SGbladeofCVL % % exp_2018_11_02_bladecut([B]) % === INPUT PARAMETERS === % B: Solid to be cut interactively % % EXAMPLE: % exp_2018_11_02_bladecut(SGsample(25)) % % See also: SGbladeofPL, SGbladeofCVL % % % Copyright 2018-2020 Tim C. Lueth |
SGfischertechniksample(name)- returns SG for some Fischertechnik samples |
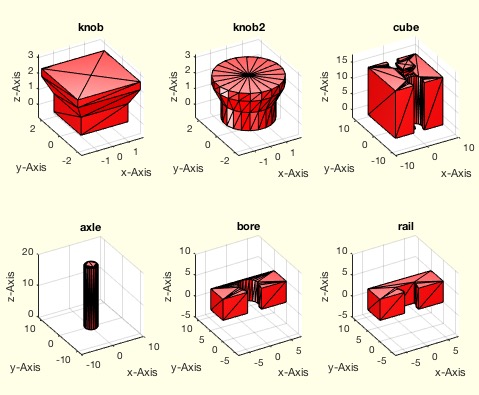 | % SGfischertechniksample(name) - returns SG for some Fischertechnik samples % (by Tim Lueth, VLFL-Lib, 2018-NOV-02 as class: MODELING PROCEDURES) % % This is not to replace Fischertechnik elements. It is much cheaper to % buy them from Fischertechnik. It is more an example how to integrate % Fischertechnik compatible contours and elements into other mechanisms. % (Status of: 2018-11-02) % % Introduced first in SolidGeometry 4.3 % % See also: CPLsample, SGsample, VLsample, PLsample, VLFLsample, % CSGsample, SGerrorsample, SGcmdsample, testfunctTL, permutevector % % SG=SGfischertechniksample([name]) % === INPUT PARAMETERS === % name: name of a solid or just empty to see all supported ones % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGfischertechniksample % % See also: CPLsample, SGsample, VLsample, PLsample, VLFLsample, % CSGsample, SGerrorsample, SGcmdsample, testfunctTL, permutevector % % % Copyright 2018 Tim C. Lueth |
webdownload(url,FNAME)- downloads a file from a url and changes the name to date and tim |
 | % webdownload(url,FNAME) - downloads a file from a url and changes the name to date and tim % (by Tim Lueth, VLFL-Lib, 2018-NOV-01 as class: FILE HANDLING) % % Same construction data is stored on file server in the internet. By % using this fnctn it is possible to download it and store it permanently % for performance reasons locally on your system. In addition the name of % the file can be changed to a name concept that fits your needs. % By default date and time of download is used as name. % By default the original extension of the file is reused. (Status of: % 2018-11-01) % % Introduced first in SolidGeometry 4.3 % % See also: loadweb % % [fname,orgfname,data]=webdownload([url,FNAME]) % === INPUT PARAMETERS === % url: complete url to download the file % FNAME: new file name; default is datestr; false=> original name % === OUTPUT RESULTS ====== % fname: file name on your file system % orgfname: original file name % data: data from url source % % EXAMPLE: % url=''; % webdownload(url,false) % webdownload(url) % webdownload(url,'test') % webdownload(url,'test.xxx') % % See also: loadweb % % % Copyright 2018 Tim C. Lueth |
CPLfischertechnik(tol,gb);- returns the most common CPL for the design of fischertechnik compatible connections |
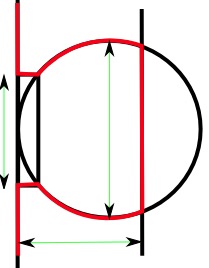 | % CPLfischertechnik(tol,gb); - returns the most common CPL for the design of fischertechnik compatible connections % (by Tim Lueth, VLFL-Lib, 2018-OKT-31 as class: CLOSED POLYGON LISTS) % % The stones have a width of 15 x 15 x 15 mm % The buttons have a height of 2.5 mm, a width of 4 mm at the head and 3 % mm at the foot. % The distance between the rails is therefore also 15 mm. % The rods have a diameter of 4 mm. % The drill holes have a distance of 10 mm % The holes are cut with the button foot widths % The buttons were initially cut circles and have changed to swallowtails % or today V-lips % (Status of: 2018-11-01) % % Introduced first in SolidGeometry 4.3 % % See also: FTelement, VLFLdovetail % % [CPLL,CPLI,CPLC,PL3,PL4]=CPLfischertechnik([tol,gb]); % === INPUT PARAMETERS === % tol: [tolerance between the lines CPLL and CPLI[a % gb: length of contour; default is 15 mm % === OUTPUT RESULTS ====== % CPLL: Line to create a blade or concave contour (rail, blade) % CPLI: Line to create a convex contour (know) % CPLC: % PL3: % PL4: % % EXAMPLE: % [a,b,c,d,e]=CPLfischertechnik; % f=a(2:end-1,:); SGofCPLrot(f); % f=a(2:end-1,:); SGofCPLrot(f,4); % f=c(2:end-1,:); SGofCPLrot(f); % SGofCPLz(e,15); % SGofCPLz(d,15); % f=b(2:end-1,:); SGofCPLrot(f,4,true) % SGofCPLz(d,15); A=ans; f=b(2:end-1,:); SGofCPLrot(f,4); B=ans; SGtransrelSG(B,A,'aligntop',2.5) % % % See also: FTelement, VLFLdovetail % % % Copyright 2018 Tim C. Lueth |
SGofSGTsurface(SGT,FNam,t,d,s)- returns the flange surface for a given T matrix frame name |
 | % SGofSGTsurface(SGT,FNam,t,d,s) - returns the flange surface for a given T matrix frame name % (by Tim Lueth, VLFL-Lib, 2018-OKT-31 as class: SURFACES) % % calls fnctn SGofSurface with the surfaces of Frame N (Status of: % 2018-10-31) % % Introduced first in SolidGeometry 4.3 % % See also: isplanarVLFL, SGofSurface, VLFLofSGTsurface % % SG=SGofSGTsurface([SGT,FNam,t,d,s]) % === INPUT PARAMETERS === % SGT: Solid Geometry % FNam: Name of Frame % t: thickness of the solid; default is 0.5 % d: distance from the surface; default is 0.3 % s: streching of the border line; default is 0 % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % load JACO_robot.mat % X=SGTui(JC01,'T',1); % SGofSGTsurface(X,'T') % % See also: isplanarVLFL, SGofSurface, VLFLofSGTsurface % % % Copyright 2018 Tim C. Lueth |
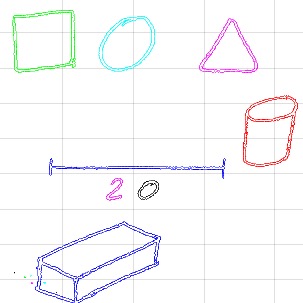
SGcmdsample(name)- Creates a SGcommandstring or a solid for some sampke geometries |
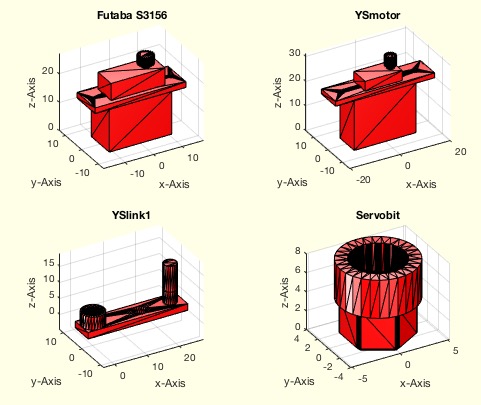 | % SGcmdsample(name) - Creates a SGcommandstring or a solid for some sampke geometries % (by Tim Lueth, VLFL-Lib, 2018-OKT-31 as class: SURFACES) % % Introduced first in SolidGeometry 4.3 % % See also: SGCLsample, SGofCPLcommand, SGofCPLui, CPLsample, SGsample, % VLsample, PLsample, VLFLsample, CSGsample, SGerrorsample, % SGfischertechniksample, testfunctTL, permutevector % % [cmd,SG]=SGcmdsample([name]) % === INPUT PARAMETERS === % name: name of solid or empty % === OUTPUT RESULTS ====== % cmd: command string % SG: solid geometry % % EXAMPLE: % SGcmdsample % SGcmdsample('3156') % SGcmdsample('S3156') % % See also: SGCLsample, SGofCPLcommand, SGofCPLui, CPLsample, SGsample, % VLsample, PLsample, VLFLsample, CSGsample, SGerrorsample, % SGfischertechniksample, testfunctTL, permutevector % % % Copyright 2018-2019 Tim C. Lueth |
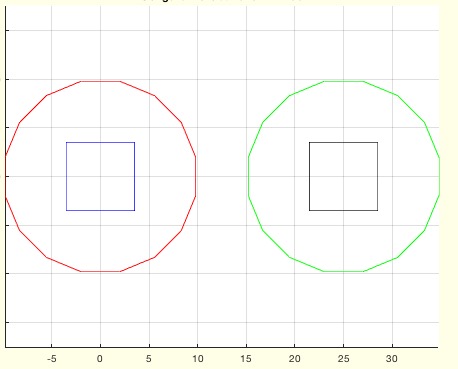
CPLcopyradial(CPL,R,n,ow)- copies a CPL radial with radius and number of copies |
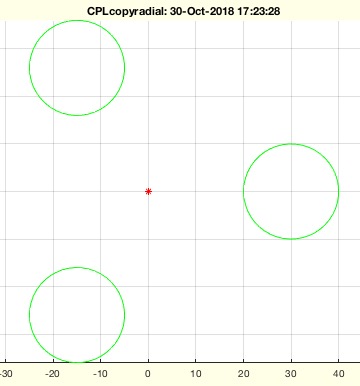 | % CPLcopyradial(CPL,R,n,ow) - copies a CPL radial with radius and number of copies % (by Tim Lueth, VLFL-Lib, 2018-OKT-30 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.3 % % See also: CPLcopypattern, CPLcopypatternPL % % CPL=CPLcopyradial(CPL,R,n,[ow]) % === INPUT PARAMETERS === % CPL: Original Contour % R: Radius % n: number of copies % ow: offest angle % === OUTPUT RESULTS ====== % CPL: copied contours % % EXAMPLE: % CPLcopyradial(PLcircle(10),30,3); % % See also: CPLcopypattern, CPLcopypatternPL % % % Copyright 2018 Tim C. Lueth |
CPLofPLgrowline(PL,s,edge,caps);- converts a single open polygon into a grown contour |
 | % CPLofPLgrowline(PL,s,edge,caps); - converts a single open polygon into a grown contour % (by Tim Lueth, VLFL-Lib, 2018-OKT-30 as class: CLOSED POLYGON LISTS) % % Reimplemented version of PLgrowline using the polyshape class on % 2018-10-30 by Tim Lueth (Status of: 2018-10-30) % % Introduced first in SolidGeometry 4.3 % % See also: PLgrow, CPLgrow, CPLbuffer, CPLofPLgrow % % CPL=CPLofPLgrowline(PL,s,[edge,caps]); % === INPUT PARAMETERS === % PL: Open point list line % s: thickness % edge: true= rounded edges; false = simple; default false; % caps: true= rounded caps; false = straight; default is false; % === OUTPUT RESULTS ====== % CPL: Closed Polygon line % % EXAMPLE: PL=[-5 10; -5 0; +5 0; +5 -10], CPLofPLgrowline(PL,1,true) % PL=[-5 10; -5 0; +5 0; +5 -10], CPLofPLgrowline(PL,1,false) % PL=[0 -19;0 20;0 19; 0 0] % PL=[-5 10; -5 0; +5 0; +5 -10], CPLofPLgrowline(PL,1,true,true) % % See also: PLgrow, CPLgrow, CPLbuffer, CPLofPLgrow % % % Copyright 2018 Tim C. Lueth |
CPLofPLgrow(PL,R)- creates CPL circles around points of a point list |
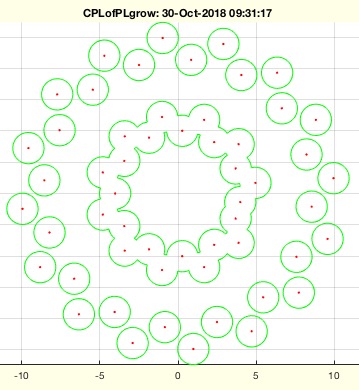 | % CPLofPLgrow(PL,R) - creates CPL circles around points of a point list % (by Tim Lueth, VLFL-Lib, 2018-OKT-30 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.3 % % See also: CPLbuffer, CPLofPLgrowline % % CPL=CPLofPLgrow(PL,R) % === INPUT PARAMETERS === % PL: point list [n x 2] % R: Radius % === OUTPUT RESULTS ====== % CPL: % % EXAMPLE: % CPLofPLgrow(PLstar(10),1) % CPLofPLgrow(PLstar(10),2) % CPLofPLgrow([PLstar(10);nan nan;PLstar(5)],1) % % See also: CPLbuffer, CPLofPLgrowline % % % Copyright 2018 Tim C. Lueth |
CPLbuffer(CPL,d,typ);- grows shrinks a CPL |
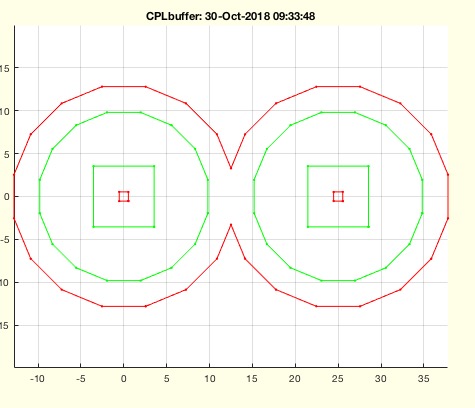 | % CPLbuffer(CPL,d,typ); - grows shrinks a CPL % (by Tim Lueth, VLFL-Lib, 2018-OKT-30 as class: CLOSED POLYGON LISTS) % % ATTENTION in contrast to CPLgrow, this fnctn uses polyshape and % polybuffer. Both fnctns change the order of the points within a cpl and % also the orientation to always clock-wise (cw) ! % 1st contour is cw, next inter ccw then cw and so on. (Status of: % 2019-07-05) % % Introduced first in SolidGeometry 4.3 % % See also: CPLofPLgrow, CPLofPLgrowline, PLonCPLcontour % % CPLN=CPLbuffer(CPL,d,[typ]); % === INPUT PARAMETERS === % CPL: Closed Polygon line line % d: Shifting distance % typ: 'round'—Round out ,'square'—Square off, 'miter'—Preserve angle % % === OUTPUT RESULTS ====== % CPLN: Closed Polygon line % % EXAMPLE: % CPLbuffer(PLstar(10),1); % CPLbuffer(CPLsample(12),+3); % CPLbuffer(CPLsample(12),+3,'round'); % CPLbuffer(CPLsample(10),1) % % % See also: CPLofPLgrow, CPLofPLgrowline, PLonCPLcontour % % % Copyright 2018-2020 Tim C. Lueth |
surfofgca(gh)- returns the surfaces (not the patches) from the graphics handel |
 | % surfofgca(gh) - returns the surfaces (not the patches) from the graphics handel % (by Tim Lueth, VLFL-Lib, 2018-OKT-30 as class: VISUALIZATION) % % uses h=findall(gh,'type','surface'); surf2patch(h,'triangles'); % (Status of: 2018-10-31) % % Introduced first in SolidGeometry 4.3 % % See also: VLFLofSurf, surf2patch % % [h,VL,FL]=surfofgca([gh]) % === INPUT PARAMETERS === % gh: axis handle; default is gca % === OUTPUT RESULTS ====== % h: handle to all surfaces of hf % VL: Vertex list of surface % FL: Triangulated Facet List of Surfaces using surf2patch % % % See also: VLFLofSurf, surf2patch % % % Copyright 2018 Tim C. Lueth |
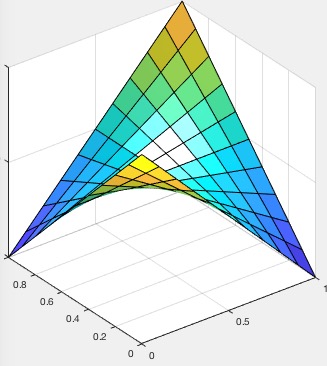
VLFLofSurf(s)- returns a vertex and facet list from a surf handle |
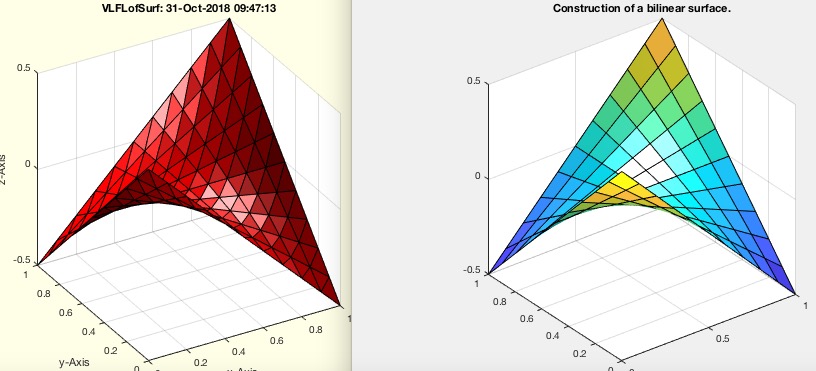 | % VLFLofSurf(s) - returns a vertex and facet list from a surf handle % (by Tim Lueth, VLFL-Lib, 2018-OKT-30 as class: SURFACES) % % Matlab support not only patches (n x 3) tesselates surfaces but also % polygon shaphed surfaces caller surfaces (Status of: 2018-10-31) % % Introduced first in SolidGeometry 4.3 % % See also: VLFLofPatch % % [VL,FL]=VLFLofSurf(s) % === INPUT PARAMETERS === % s: surface handle % === OUTPUT RESULTS ====== % VL: Vertex list % FL: Facet list % % See also: VLFLofPatch % % % Copyright 2018 Tim C. Lueth |
CPLmeltbool(CPL,fullstep)- Merges a list of CPL by boolean add and sub |
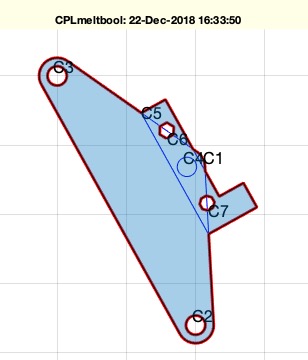 | % CPLmeltbool(CPL,fullstep) - Merges a list of CPL by boolean add and sub % (by Tim Lueth, VLFL-Lib, 2018-OKT-30 as class: CLOSED POLYGON LISTS) % % % [a,b]=CPLsortinout(CPLsample(14)) (Status of: 2018-12-22) % % Introduced first in SolidGeometry 4.3 % % See also: CPLsortinout, CPLbool, CPLsplitpoints, CPLrecontour, CPLrepair % % CPL1=CPLmeltbool(CPL,[fullstep]) % === INPUT PARAMETERS === % CPL: % fullstep: % === OUTPUT RESULTS ====== % CPL1: % % EXAMPLE: % PLA=[PLcircle(4); nan nan; PLcircle(4)+3]; % Orientation doesnt matter % PLB=[PLcircle(4); nan nan; flipud(PLcircle(4)+3)]; % Orientation doesnt matter % CPLmeltbool(CPLsample(14)); % Single step analysis % CPLmeltbool(CPLsample(14),true); % Full step analysis % % See also: CPLsortinout, CPLbool, CPLsplitpoints, CPLrecontour, CPLrepair % % % Copyright 2018-2019 Tim C. Lueth |
cellsize(C);- returns the size of cell elements |
 | % cellsize(C); - returns the size of cell elements % (by Tim Lueth, VLFL-Lib, 2018-OKT-30 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.3 % % See also: size, numel, length % % cs=cellsize(C); % === INPUT PARAMETERS === % C): cell array % === OUTPUT RESULTS ====== % cs: size of array % % EXAMPLE: % loadweb JACO_robot.mat; % FS=FSofSG(JCF), size(FS) % cellsize(FS) % cellsize(FS') % cellsize({[1 ],[3 2] [2 3 1] [2]}) % % See also: size, numel, length % % % Copyright 2018 Tim C. Lueth |
CPLofSGsliceauto(SG,dz);- returns the slive with a significant z distance |
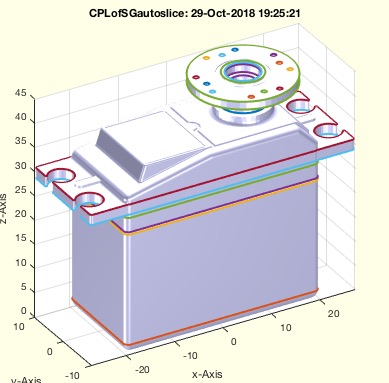 | % CPLofSGsliceauto(SG,dz); - returns the slive with a significant z distance % (by Tim Lueth, VLFL-Lib, 2018-OKT-29 as class: SLICES) % % Introduced first in SolidGeometry 4.3 % % See also: CPLofSGslice, CPLofSGslice2, CPLofSGslice3, CVLzofSGsliceauto % % [CPL,CVL,zz]=CPLofSGsliceauto(SG,[dz]); % === INPUT PARAMETERS === % SG: Solid Geometry % dz: minimal z change; default is soBB(SG)/50 % === OUTPUT RESULTS ====== % CPL: Closed Polygon Line % CVL: Closed Vertex List of all z values % zz: % % EXAMPLE: % SGreadSTL; A=ans; SGrotateservo(A); B=ans % CPLofSGsliceauto(B); % % % See also: CPLofSGslice, CPLofSGslice2, CPLofSGslice3, CVLzofSGsliceauto % % % Copyright 2018-2020 Tim C. Lueth |
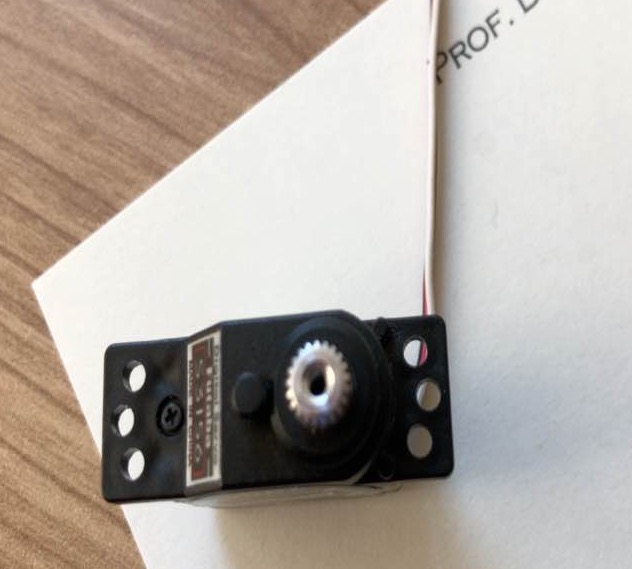
SGrotateservo(SG)- turns the SG of a servo motor to an upright position |
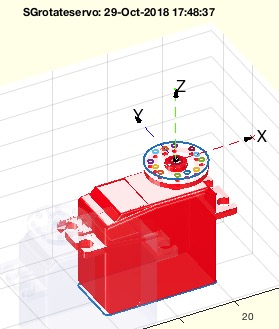 | % SGrotateservo(SG) - turns the SG of a servo motor to an upright position % (by Tim Lueth, VLFL-Lib, 2018-OKT-29 as class: SURFACES) % % The X axis is the longest dimension % The y axis is the smallest dimension (Status of: 2020-07-03) % % Introduced first in SolidGeometry 4.3 % % See also: SGrotate, SGmotorG50V6 % % [SG,T,CPL1,CPL2]=SGrotateservo(SG) % === INPUT PARAMETERS === % SG: Original Servo Solid Geoemtry % === OUTPUT RESULTS ====== % SG: Rotate Solid % T: Frame of Shaft % CPL1: Contour of Shaft % CPL2: Contour of body % % EXAMPLE: % SGreadSTL; A=ans; SGrotateservo(A) % % See also: SGrotate, SGmotorG50V6 % % % Copyright 2018-2020 Tim C. Lueth |
SGofCPLui_2018- simple CPL and SG editor using SGofCPLcommand |
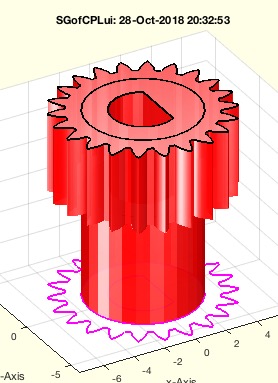 | % SGofCPLui_2018 - simple CPL and SG editor using SGofCPLcommand % (by Tim Lueth, VLFL-Lib, 2018-OKT-28 as class: CLOSED POLYGON LISTS) % % ======================================================================= % OBSOLETE (2019-08-12) - USE 'SGofCPLcommandui' INSTEAD % ======================================================================= % % Introduced first in SolidGeometry 4.3 % % See also: [ SGofCPLcommandui ] ; SGofCPLcommand, SGofCPLui, SGcmdsample % % [SG,CPL]=SGofCPLui_2018 % === OUTPUT RESULTS ====== % SG: Solid geometry % CPL: Closed polygon line % % EXAMPLE: % SGofCPLui % c 4, c 2, h 3, b 40 40, h 5 % g 10 22, ms 4 2, h 5, c 7, h 7, % % See also: [ SGofCPLcommandui ] ; SGofCPLcommand, SGofCPLui, SGcmdsample % % % Copyright 2018-2019 Tim C. Lueth |
PCwriteXYZ(PC,FNAME,ONAME)- writes an XYZ File of Vertices and Normals that is used by Meshlab |
 | % PCwriteXYZ(PC,FNAME,ONAME) - writes an XYZ File of Vertices and Normals that is used by Meshlab % (by Tim Lueth, VLFL-Lib, 2018-OKT-28 as class: VERTICES / CLOUDS) % % Introduced first in SolidGeometry 4.3 % % See also: SGwriteSTL, CPLwriteSVG % % PCwriteXYZ(PC,[FNAME,ONAME]) % === INPUT PARAMETERS === % PC: Point Cloud or Vertex list % FNAME: % ONAME: % % EXAMPLE: % loadweb IntelRealsense.mat % loads vertex lists from RS300 and RS415 % PCwriteXYZ(VL_D415a); % % See also: SGwriteSTL, CPLwriteSVG % % % Copyright 2018 Tim C. Lueth |
CPLboolpshape(fflag,CPLA,CPLB);- Boolean Fncts based on the polyshape class |
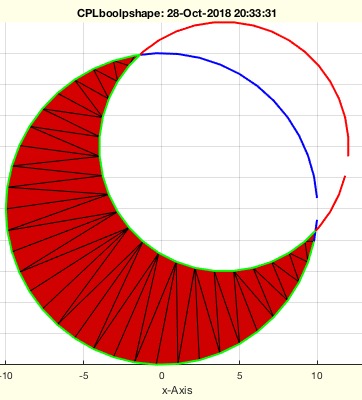 | % CPLboolpshape(fflag,CPLA,CPLB); - Boolean Fncts based on the polyshape class % (by Tim Lueth, VLFL-Lib, 2018-OKT-26 as class: SURFACES) % % Polyshape class ignore the polygon orientation if 'simplify' is set to % false. PREFERABLE % Polyshape class MODIFIES the polygon shape if 'simplify' is set to % true. PLEASE AVOID % case {'+','PLUS','OR','UNION'} % case {'X','AND','INTERSECT'} % case {'A','A\B'} % case {'B','B\A', 'REM'} % case 'XOR' (Status of: 2018-10-28) % % Introduced first in SolidGeometry 4.3 % % See also: CPLbool, CPLpolybool % % CPLN=CPLboolpshape(fflag,CPLA,CPLB); % === INPUT PARAMETERS === % fflag: Operator % CPLA: Contour A % CPLB: Contour B % === OUTPUT RESULTS ====== % CPLN: Final CPL % % EXAMPLE: % CPLboolpshape('+',PLcircle(10), flipud(PLcircle(8)+4)) % % See also: CPLbool, CPLpolybool % % % Copyright 2018 Tim C. Lueth |
SGofCPLcommand(cstr,blines,t,gap1,gap2,gap3)- Simple commandline based 2.5 solid modeler for the use of a caliper |
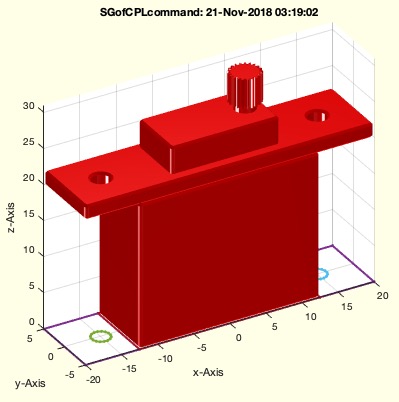 | % SGofCPLcommand(cstr,blines,t,gap1,gap2,gap3) - Simple commandline based 2.5 solid modeler for the use of a caliper % (by Tim Lueth, VLFL-Lib, 2018-OKT-25 as class: PARAMETRIC DESIGN) % % First a Contour is designed; afterwards the contour is extruded; and % set below the already designed existing solid; ATTENTION IF YOU MELT % THE PARTS AFTERWARDS AVOID edges with same planes % % SGofCPLcommands supports the following commands, separated by commas: % See publishable tutorial VLFL_EXP45.m % % === CPL shape commands ================================= % b x-size y-size [d] => Box as rectangle or displace trapaze % c diameter diameter edges => Cylinder or ellipse as polygon % cs phi r-outer r-inner offset => Cylinder segment with angle % co r-outer length r-inner => Cylinder oval segment with optional % holes % d diameter x-coord y-coord n-faces => Drilling hole at x/y with n edges % g diameter teeth-nr turn => Gear that it turned (f.i. 0.5 teeth) % ms diameter-1 diameter-2 => Motor shaft contour % % === CPL manipulation commands ================================= % move x-coord y-coord => Move the CPL relatively % cp x-coord y-coord => Center point change % ch distance radius => Convex hull in distance with optional radius % dupc x-copies y copies distance => Duplicates contour in as x y % pattern % dupr radius number offset => Duplicates contour radial in n copies % rad radius => Radial edges (+r) or cuts (-r) at each corner % rot degree x y => Rotate a contour ccw by degree on centerpoint x % y, default is center of CPL % mirr x1 y1 x2 y2 => mirror CPL at straigth line through p1 p2 % fitt char => create fitting buffer 'c', 't', 'i' for all holes in % CPL % % === CPL stack commands ================================= % enter => current CPL is shifted to the stack % dup => current CPL is duplicated to the stack % swap => current CPL is swaped with CPL on stack % +/add => current CPL is added to stack CPL % -/sub => current CPL is substracted from stack CPL % rem => stack CPL ist substracted from current CPL % &/isec => current CPL is intersected with stack CPL % hs height => stack connection using height % % === CPL to solid commands ================================= % h height z-displacement => Height of the extruded solid % hc height z-displacement => Height of extrusion with smoothed edges % r angle pitch => Extrusion by rotation (degree) and optional pitch % % === SG element commands ================================= % scr mm length diameter => Screw/Cutter/Nut threat of diameter and % length % sph diameter end-angle => Sphere % text string size-x size-z => Text string without space % % === SG manipulation commands ================================= % move x-coord y-coord => Move the solid relatively % cham rar upper-dist lower-dist => Chamfer the edges of a 2.5 solid % rotx degree => rotate around the x-axis % roty degree => rotate around the y-axis % rotz degree => rotate around the z-axis % mirr x-degree y-degree z-displacement => mirror at the xy plane % rotated around x and y-axis shifted in z % grow offset => Grow/shrink the current solid with an offset % melt => Boolean addition of all solid elements % textstamp string => Add a string to the largest surface % dupr number => Duplicates solids radial in n copies % dups nx ny nz d => Duplicates solid spatial in x y z with distance d % dupg nx ny nz d => Duplicates solid on a grid in x y z with % distance d % hollow wall => Creates a hollow solid % shell wall distance => Creates a shell for the solid % cutz z1 z2 => Cuts the solid at z1 and z2 % % === SG save and restore commands ================================= % save name => saves the solid into name.SG % load name => loads a solid from name.SG % write name => saves the solid into File name.STL % read name => reads the solid from File name.STL % mag fact => magnifies the current solid % col color => colors the faces of the current solid % % === SG stack commands ================================= % enter => current SG is shifted to the stack % dup => current SG is duplicated to the stack % swap => current SG is swaped with SG on stack % clear nr => Clear stack content 1..n % +/add => current SG is added to stack SG % -/sub => current SG is substracted from stack SG % rem => stack SG is substracted from current SG % &/isec => current SG is intersected with stack SG % rel command parameter => current SG is move relatively to stack % % === Frame commands ================================= % fset name ident rotation feature => attach a frame to the current SG % falign Stack-Frame SG-Frame degree => align current SG-frame with % stack frame and rotate % % === Macro commands ================================= % $cmd: % $cmd $1 $2 $3 $4 => Use macro as command with $1 $2 $3 $4 as % parameters % % % Try: SGofCPLcommand('g 3 22, h 5, c 5, h 20, roty -90, move 10 10') % Try: SGofCPLcommand('$cob: co $1 $2 $3, h $3, fset B 1 0 R1, fset F 2 0 % R2:, $cob 10 50 5, dup, falign F B 45') % Try: SGofCPLcommand('b 30 10, h 10, enter, $hole: c 3, h 10, rotx % 90,move $1 $2 $3 :,$hole 10 5 5,-,enter, $hole 0 5 5,-,enter, $hole -10 % 5 5,-') % by Kei Aoyagi % % % 2018-11-21 Tim Lueth (implementation) and Yilun Sun (requests) % discussed the boolean RPN (reverse Polish Notation / Forth) concept % using stacks % (Status of: 2020-09-21) % % Introduced first in SolidGeometry 4.3 % % See also: SGofCPLui, SGofCPLz, SGsurfacemeltbool, SGsurfacemeltbool % % [SG,CPLO,warn]=SGofCPLcommand(cstr,[blines,t,gap1,gap2,gap3]) % === INPUT PARAMETERS === % cstr: CPL command string, use '?' for info % blines: % t: % gap1: % gap2: % gap3: % === OUTPUT RESULTS ====== % SG: solid Geometry % CPLO: % warn: % % EXAMPLE: % SGofCPLcommand('g 4 21, h 4'); % Gear with diameter 4mm, 21 teeth, height 4 mm % SGofCPLcommand('g 4 21, h 4, c 3, h 1, move 5 0, b 40 10 ,h 2,b 25 10 , h 20') % SGofCPLcommand('g 4 21, h 4, c 3, h 1, move 5 0, b 40 10 ,d 2.5 -15 0, d 2.5 +15 0, h 2,b 25 10 , h 20') % SGofCPLcommand('g 4 21, h 4, c 3, h 1, move 5 0, b 15 8, h 4, b 40 10 ,d 2.5 -15 0, d 2.5 +15 0, h 2,b 25 10 , h 20') % SGofCPLcommand('g 4 21, h 4, c 3, h 1, move 5 0, b 15 8, hc 4, b 40 10 ,d 2.5 -15 0, d 2.5 +15 0, hc 2,b 25 10 , hc 20') % SGofCPLcommand('g 5 10, enter, b 10 30 10') % SGofCPLcommand('g 5 10, enter, b 10 30 10') % SGofCPLcommand('g 5 10, enter, b 10 30 10, xor, h 4') % % See also: SGofCPLui, SGofCPLz, SGsurfacemeltbool, SGsurfacemeltbool % % % Copyright 2018-2020 Tim C. Lueth |
SGgearwormDIN(m,dw,wg,R)- returns a gear worm solid |
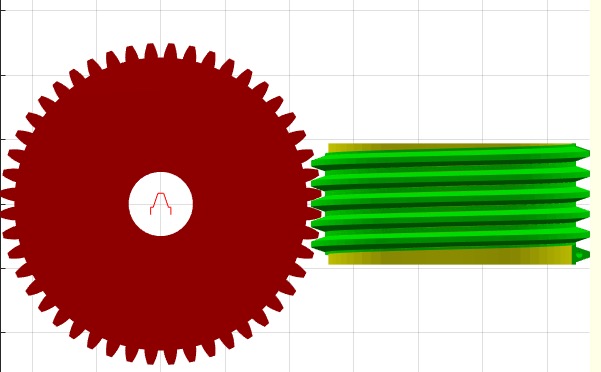 | % SGgearwormDIN(m,dw,wg,R) - returns a gear worm solid % (by Tim Lueth, VLFL-Lib, 2018-OKT-24 as class: PARAMETRIC DESIGN) % % DIN 3975 % (Status of: 2018-10-25) % % Introduced first in SolidGeometry 4.3 % % See also: PLgearrackDIN, SGgearDIN, SGgearpairDIN, SGgearrackDIN, % CPLmotorshaft % % [SGW,SGX]=SGgearwormDIN([m,dw,wg,R]) % === INPUT PARAMETERS === % m: modul % dw: diameter middle circle % wg: number of windings; default is 5; if wg<0; Len=abs(wg) % R: Radius or CPL for an inner contour % === OUTPUT RESULTS ====== % SGW: Solid of gear work % SGX: Gear and Shaft % % EXAMPLE: % SGgearmwormDIN(1,5) % SGgearmwormDIN(1,10) % SGgearmwormDIN(1,20) % SGgearmwormDIN(1,40) % SGgearmwormDIN(1,40,6) % SGgearmwormDIN(1,'','',2); view(-30,30); % SGgearmwormDIN(1,'','',CPLmotorshaft); view(-30,30); % % See also: PLgearrackDIN, SGgearDIN, SGgearpairDIN, SGgearrackDIN, % CPLmotorshaft % % % Copyright 2018-2021 Tim C. Lueth |
VLFLselectcrossingfacets(SG,T,XSG,xfull);- selects the crossing facets of a solid that is crossed by a second one |
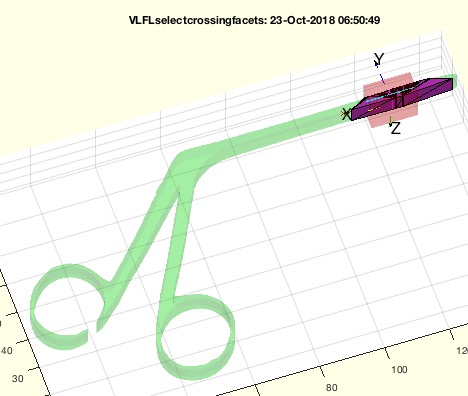 | % VLFLselectcrossingfacets(SG,T,XSG,xfull); - selects the crossing facets of a solid that is crossed by a second one % (by Tim Lueth, VLFL-Lib, 2018-OKT-21 as class: VERTICES / CLOUDS) % % This fnctn is an optional interactive fnctn to select the potential % crossing facet of two solids (Status of: 2018-10-23) % % Introduced first in SolidGeometry 4.3 % % See also: VLDLBBofVLFL, collofBBs, SGintersectFacetPoints, % VLofVLFLselfIntersection % % CFL=VLFLselectcrossingfacets(SG,[T,XSG,xfull]); % === INPUT PARAMETERS === % SG: Solid A % T: point or HT matrix; default==''; manual select % XSG: cube length, rectangle size, box size or Solid Geoemetry % xfull: true == full cross check not only BB of XSG; default is false; % === OUTPUT RESULTS ====== % CFL: crossing facets of [SG XSG] % % EXAMPLE: % load SG_Instruments.mat % VLFLselectcrossingfacets(SG_Forceps) % VLFLselectcrossingfacets(SG_Forceps,[120 75]) % VLFLselectcrossingfacets(SG_Forceps,[120 75],[40 20]) % VLFLselectcrossingfacets(SGsphere(12),'',[1 50 50]); % % See also: VLDLBBofVLFL, collofBBs, SGintersectFacetPoints, % VLofVLFLselfIntersection % % % Copyright 2018-2021 Tim C. Lueth |
CPLplotregions(CPL,ind)- plots the regions of a CPL / polyshape in different colors |
 | % CPLplotregions(CPL,ind) - plots the regions of a CPL / polyshape in different colors % (by Tim Lueth, VLFL-Lib, 2018-OKT-18 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.3 % % See also: CPLplotasPS, CPLplot, CPLfaceplot, CPLplotcolors, CPLplotinout % % h=CPLplotregions(CPL,[ind]) % === INPUT PARAMETERS === % CPL: Closed polygon % ind: index of regions; default is all % === OUTPUT RESULTS ====== % h: handle to graphics objects % % EXAMPLE: % SGfigure; CPLplotregions(CPLsample(14)) % % See also: CPLplotasPS, CPLplot, CPLfaceplot, CPLplotcolors, CPLplotinout % % % Copyright 2018 Tim C. Lueth |
CPLplotcolors(CPL,ind,fs)- plots all contours or indexed contours in colors |
 | % CPLplotcolors(CPL,ind,fs) - plots all contours or indexed contours in colors % (by Tim Lueth, VLFL-Lib, 2018-OKT-18 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.3 % % See also: CPLplotasPS, CPLplot, CPLfaceplot, CPLplotregions, % CPLplotinout, CPLplotcwccw % % h=CPLplotcolors(CPL,[ind,fs]) % === INPUT PARAMETERS === % CPL: Closed Polygon line % ind: indizes; default is all % fs: optional font size % === OUTPUT RESULTS ====== % h: handle to graphics objects % % EXAMPLE: % SGfigure; CPLplotcolors(CPLsample(12)); % SGfigure; CPLplotcolors(CPLsample(12),'',16); % % % See also: CPLplotasPS, CPLplot, CPLfaceplot, CPLplotregions, % CPLplotinout, CPLplotcwccw % % % Copyright 2018-2019 Tim C. Lueth |
CPLopendistance(CPL)- returns the maximal distance between neighbor points of a contour related to the contour size |
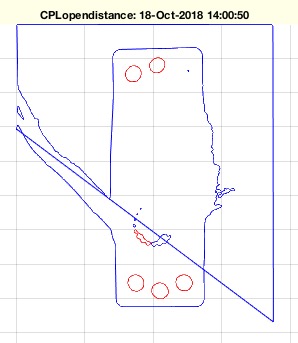 | % CPLopendistance(CPL) - returns the maximal distance between neighbor points of a contour related to the contour size % (by Tim Lueth, VLFL-Lib, 2018-OKT-18 as class: CLOSED POLYGON LISTS) % % This fnctn is designed for analyzing CPLofprocessedimage contoures or % CPLofimage contours (Status of: 2018-10-18) % % Introduced first in SolidGeometry 4.3 % % See also: CPLofprocessedimage, CPLofimage % % [DP,DN]=CPLopendistance(CPL) % === INPUT PARAMETERS === % CPL: CLosed Polygon line % === OUTPUT RESULTS ====== % DP: maximum distance in relation to bb of CPL % DN: maximum distance between two points % % See also: CPLofprocessedimage, CPLofimage % % % Copyright 2018 Tim C. Lueth |
FLofVLonsphereprojection(VL)- returns a facet list that is based on alphashape triangulation of sphere projected vertices |
 | % FLofVLonsphereprojection(VL) - returns a facet list that is based on alphashape triangulation of sphere projected vertices % (by Yilun Sun, VLFL-Lib, 2018-OKT-17 as class: VERTICES / CLOUDS) % % Point clouds that are recorded by a video camera create vertices that % are equidistant if they are projected on to a internal surface of a % sphere. Therefor this fnctn projects first vertices to spherical, % performs an alphashape triangulation, and returns the facets (Status % of: 2018-10-17) % % Introduced first in SolidGeometry 4.3 % % See also: FLofVLnearestneighbors, FLofVLdelaunay % % [FL,PL]=FLofVLonsphereprojection(VL) % === INPUT PARAMETERS === % VL: Vertex list / Point cloud % === OUTPUT RESULTS ====== % FL: Facet list % PL: Point list [AZ EL] % % EXAMPLE: % loadweb IntelRealsense.mat; whos % FLofVLonsphereprojection(VL_D415c); % % % See also: FLofVLnearestneighbors, FLofVLdelaunay % |
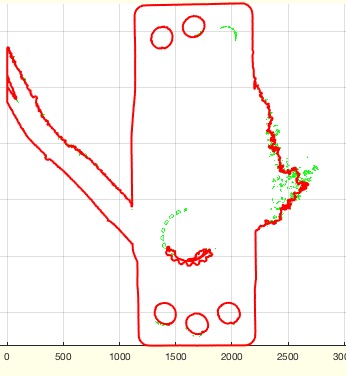
CPLofprocessedimage(I,ms,fspecial);- returns contours inside a processed image |
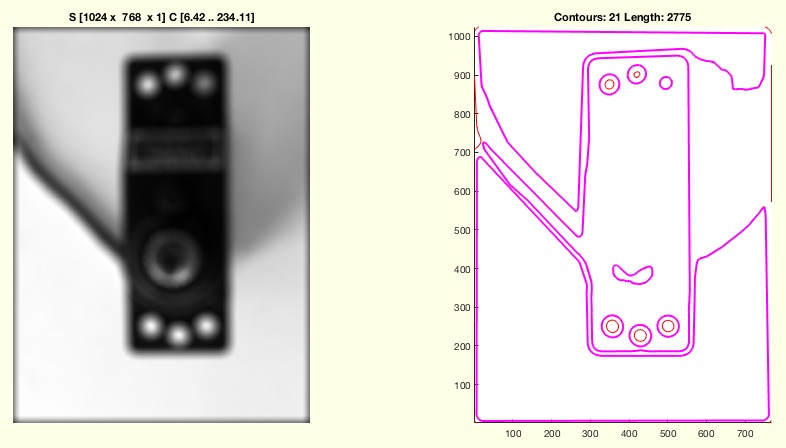 | % CPLofprocessedimage(I,ms,fspecial); - returns contours inside a processed image % (by Tim Lueth, VLFL-Lib, 2018-OKT-17 as class: IMAGES) % % It uses finally CPL=CPLofimage(I,2); % Support: 'gaussian', 'sobel', 'prewitt', 'laplacian', 'log', 'average', % 'unsharp', 'disk', 'motion' % (Status of: 2018-10-17) % % Introduced first in SolidGeometry 4.3 % % See also: fspecial, imfilter, CPLofimage % % CPL=CPLofprocessedimage(I,[ms,fspecial]); % === INPUT PARAMETERS === % I: Image % ms: optional resize value; default is 1024; 0==unchanged % fspecial: optional filter values - see at fspecial % === OUTPUT RESULTS ====== % CPL: % % EXAMPLE: % loadweb CAD_pictures.mat; imshow(CADpictservo); shg % CPLofprocessedimage(CADpictservo,'','disk',20); CPL=ans; CPL=CPL/10; % findcirclesinCPL(CPL,1) % % See also: fspecial, imfilter, CPLofimage % % % Copyright 2018 Tim C. Lueth |
lengthNaN(CPL)- returns the length of the individiual entries of a nan separated list |
 | % lengthNaN(CPL) - returns the length of the individiual entries of a nan separated list % (by Tim Lueth, VLFL-Lib, 2018-OKT-16 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.3 % % See also: selectNaN, replaceNaN, cellofNaN, separateNaN, uniqueNaN, % unsortNaN % % [l,a]=lengthNaN(CPL) % === INPUT PARAMETERS === % CPL: nan separated list % === OUTPUT RESULTS ====== % l: length of the individual segments of the nan separated list % a: starting indices % % EXAMPLE: % loadweb CAD_pictures.mat; imshow(CADpictservo); % CPLofimage(CADpictservo); CPL=ans; % selectNaN(CPL,find(lengthNan(CPL)>300)); % [a,b]=lengthNaN(CPLsample(11)) % % See also: selectNaN, replaceNaN, cellofNaN, separateNaN, uniqueNaN, % unsortNaN % % % Copyright 2018-2019 Tim C. Lueth |
imshow4(I)- Plots RGB images in 4 color segments |
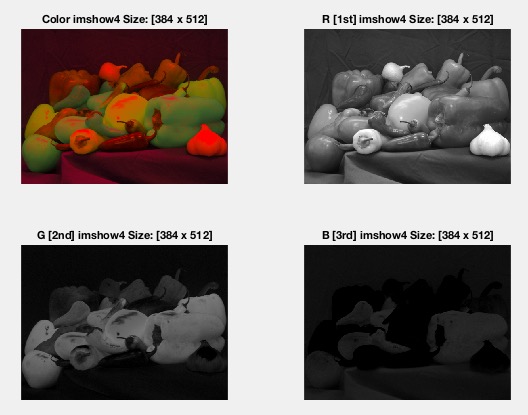 | % imshow4(I) - Plots RGB images in 4 color segments % (by Tim Lueth, VLFL-Lib, 2018-OKT-13 as class: AUXILIARY PROCEDURES) % % Auxiliary fnctn to understand easier the color chanels of a r x c x % chanel image (Status of: 2018-10-13) % % Introduced first in SolidGeometry 4.3 % % See also: imshow % % imshow4(I) % === INPUT PARAMETERS === % I: RGB image or grayscale % % EXAMPLE: % I=imread('peppers.png'); % imshow4(I) % imshow4(imresize(I,[640 nan])) % imshow4(rgb2gray(I)) % imshow4(rgb2ntsc(I)) % imshow4(sum(I,3)) % % See also: imshow % % % Copyright 2018 Tim C. Lueth |
imresizep(I,maxrc,defcol)- resizes an image proportional relative to a mimum number of pixels |
 | % imresizep(I,maxrc,defcol) - resizes an image proportional relative to a mimum number of pixels % (by Tim Lueth, VLFL-Lib, 2018-OKT-13 as class: IMAGES) % % This fnctn is used to limit an image size before image processing to % guarantee a defined processing time. The image is always scaled % proportionally. % It is possible to scale on maximum value for row or col, or on defined % rows number, defined cols number or defined size. If there is need to % add a border, since the given format differenz from the original % images's proportion, a color can specified for the border; (Status of: % 2020-03-31) % % Introduced first in SolidGeometry 4.3 % % See also: imreadui % % I=imresizep(I,maxrc,[defcol]) % === INPUT PARAMETERS === % I: Images % maxrc: maximum number of rows or cols; or [rw nan] or [nan col]; % defcol: color for borders to extend; default is 255 % === OUTPUT RESULTS ====== % I: resized image smaller than [maxrc x maxrc] % % EXAMPLE: % I=imread('peppers.png'); whos I % imresizep(I,480); pause % imresizep(I,[nan 1080]);pause % imresizep(I,[1080 nan]); % pause; imresizep(I,[700 2000],255); % pause; imresizep(I,[2000 700],100); % % See also: imreadui % % % Copyright 2018-2020 Tim C. Lueth |
viewsmooth (az,el,n)- slowly rotates to a new viwe |
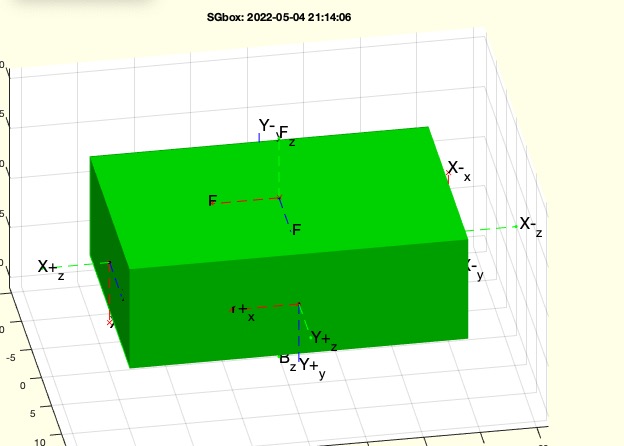 | % viewsmooth (az,el,n) - slowly rotates to a new viwe % (by Tim Lueth, VLFL-Lib, 2018-OKT-11 as class: VISUALIZATION) % % Introduced first in SolidGeometry 4.3 % % See also: viewsmooth, Videoquickrotate3D, animatego, figurerotate, % drawnowvid % % viewsmooth(az,el,[n]) % === INPUT PARAMETERS === % az: azimut similar to view % el: elevantion similar to view % n: number of steps; default is 15 % % EXAMPLE: % SGfigure(-30,30); SGbox; shg; viewsmooth(170,30,20); % % See also: viewsmooth, Videoquickrotate3D, animatego, figurerotate, % drawnowvid % % % Copyright 2018-2022 Tim C. Lueth |
findcircleinCPL(CPL,epsn)- searches for radial contours and returns center points and radius and index |
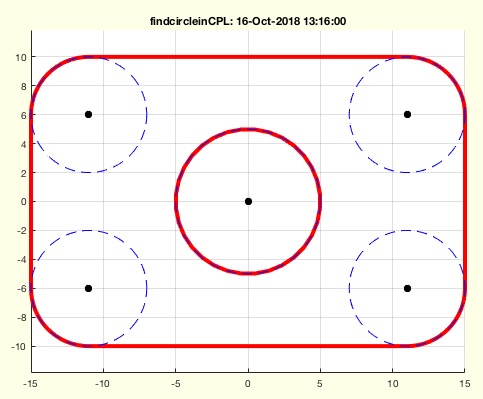 | % findcircleinCPL(CPL,epsn) - searches for radial contours and returns center points and radius and index % (by Tim Lueth, VLFL-Lib, 2018-OKT-11 as class: ANALYTICAL GEOMETRY) % % It is recommended to use PLofCPL(PL) before calling this fnctn % return format is a list for each point of the list the radius of the 3 % point neighborhood % [R X Y W nmin isR] % R is Radius R % X of Center % Y of Center % W is Angle in grad between 3 Points % nmin required number for a circle polygon for this radius and angle % isR true if detected as circle (Status of: 2018-10-15) % % Introduced first in SolidGeometry 4.3 % % See also: CVLdimclassifier % % [RL,RCL]=findcircleinCPL(CPL,[epsn]) % === INPUT PARAMETERS === % CPL: Closed Contour List % epsn: rounding limit; default is n of rd % === OUTPUT RESULTS ====== % RL: % RCL: % % EXAMPLE: % findcircleinCPL(PLofCPL(CPLsample(12))) % findcircleinCPL(PLofCPL(CPLsample(31))) % % See also: CVLdimclassifier % % % Copyright 2018 Tim C. Lueth |
imageofipcam(u)- returns an image of the ipcam |
 | % imageofipcam(u) - returns an image of the ipcam % (by Tim Lueth, VLFL-Lib, 2018-OKT-11 as class: IMAGES) % % does work with the iPhoneapp ipcam (Status of: 2018-10-11) % % Introduced first in SolidGeometry 4.3 % % See also: ipcam_2014b, immeasureui, ipcam % % imageofipcam([u]) % === INPUT PARAMETERS === % u: url - used at least for the first call % % EXAMPLE: % imageofipcam('http://10.183.35.246:8020/image.jpg'); % % See also: ipcam_2014b, immeasureui, ipcam % % % Copyright 2018 Tim C. Lueth |
CPLmotorshaft(Ra,Rc,tW)- returns the CPL for a motorshaft, for instance Fischertechnik |
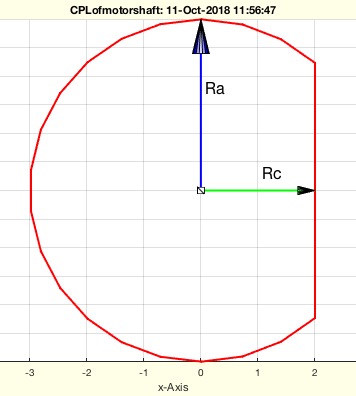 | % CPLmotorshaft(Ra,Rc,tW) - returns the CPL for a motorshaft, for instance Fischertechnik % (by Tim Lueth, VLFL-Lib, 2018-OKT-11 as class: CLOSED POLYGON LISTS) % % the standard shape is a % Ra=Da/2; Rc=Dc-Ra (Status of: 2020-07-03) % % Introduced first in SolidGeometry 4.3 % % See also: SGgearDIN, SGgearrackDIN, SGmotorG50V6 % % PL=CPLmotorshaft([Ra,Rc,tW]) % === INPUT PARAMETERS === % Ra: Radius of the largest Diameter % Rc: Radius distance from the center to the plate % tW: turning offset in degree % === OUTPUT RESULTS ====== % PL: Point List for CPL % % EXAMPLE: % CPLmotorshaft(3,2) % CPLmotorshaft(3,2,pi/2) % % See also: SGgearDIN, SGgearrackDIN, SGmotorG50V6 % % % Copyright 2018-2020 Tim C. Lueth |
SGgearandrackDIN(m,z1,z2,R,h)- retunrs a gear and gear rack combination |
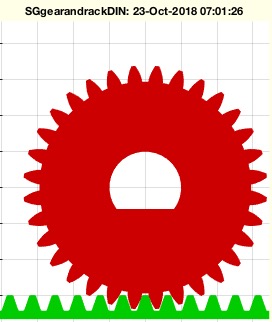 | % SGgearandrackDIN(m,z1,z2,R,h) - retunrs a gear and gear rack combination % (by Tim Lueth, VLFL-Lib, 2018-OKT-11 as class: MODELING PROCEDURES) % % Introduced first in SolidGeometry 4.3 % % See also: PLgearrackDIN, SGgearDIN, SGgearpairDIN, SGgearrackDIN, % CPLmotorshaft % % SGgearandrackDIN([m,z1,z2,R,h]) % === INPUT PARAMETERS === % m: module % z1: teeth number of gear % z2: teeth number of rack % R: bore of gear % h: height of gear and rack % % EXAMPLE: % SGgearandrackDIN(1,32,12,5,10) % SGgearandrackDIN(1,32,12,CPLmotorshaft(5,3),10) % % See also: PLgearrackDIN, SGgearDIN, SGgearpairDIN, SGgearrackDIN, % CPLmotorshaft % % % Copyright 2018 Tim C. Lueth |
SGgearrackDIN(m,z,h0,b,tig,re)- returns a gear rack for a gear |
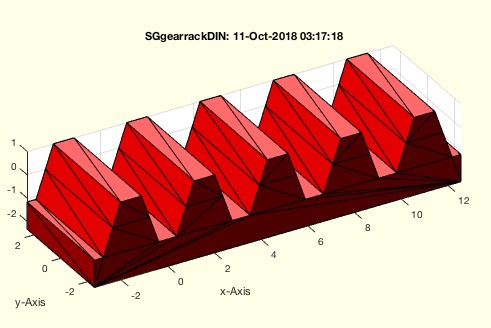 | % SGgearrackDIN(m,z,h0,b,tig,re) - returns a gear rack for a gear % (by Tim Lueth, VLFL-Lib, 2018-OKT-11 as class: SURFACES) % % Introduced first in SolidGeometry 4.3 % % See also: PLgearrackDIN, SGgearDIN, SGgearpairDIN % % SG=SGgearrackDIN([m,z,h0,b,tig,re]) % === INPUT PARAMETERS === % m: module % z: number of teeth if integer or length if real % h0: base size % b: width of rack / height of gear % tig: false = gap; true= tooth % re: rounded edges; default is false % === OUTPUT RESULTS ====== % SG: Solid Geoemtry % % EXAMPLE: % SGgearrackDIN(1,5,'',5,false) % SGgearrackDIN(1,5,'',5,false,true) % % See also: PLgearrackDIN, SGgearDIN, SGgearpairDIN % % % Copyright 2018 Tim C. Lueth |
getfuncparams(n,args,v,fillinm,b,b,b)- processes varargin list - |
 | % getfuncparams(n,args,v,fillin) - processes varargin list - % (by Tim Lueth, VLFL-Lib, 2018-OKT-11 as class: AUXILIARY PROCEDURES) % % SG-Lib standard fnctn to process the input arguments varargin % This fnctn is automaticaly processed/parsed by Tim Lueth's FM % documentation database % ===> if nargin>=XX && ~isempty(varargin{XX}); YYY=varargin{XX}; end; % The fnctn is able to handle arrays of input vales per argument % (Status of: 2020-09-06) % % Introduced first in SolidGeometry 4.3 % % See also: getvarg % % [nv,ea]=getfuncparams(n,args,v,[fillin]) % === INPUT PARAMETERS === % n: number of parameter varargin % args: varargin % v: default value % fillin: default is false; if true, variable is filled with default % values % === OUTPUT RESULTS ====== % nv: value for variable or logical of found if there are two output % arguments % ea: true if argument was empty % % EXAMPLE: % m=getfuncparams(1,varargin,1); % getfuncparams(1,{'a','b','c'},3) % getfuncparams(4,{'a','b','c'},3) % [a,b]=getfuncparams(2,{'a','','c'},3) % b shows that there 2nd is empty % [a,b]=getfuncparams(6,{'a','','c'},3) % b shows that 6th is empty % [a,b]=getfuncparams(3,{'a','','c'},'c') % b shows that 3rd is forced / given % getfuncparams(1,{9},[1 2 3 4]) % replaces the array by a scalar % getfuncparams(1,{9},[1 2 3 4],true) % replaces the first element of the array % getfuncparams(1,{[9 8 7]},[1 2 3 4],true) % replaces the first three elements of the array % A=SGbox, B=SGbox, C=[A B], getfuncparams(1,{A,B,C},[C B A],true) % % See also: getvarg % % % Copyright 2018-2021 Tim C. Lueth |
PLgearrackDIN(m,l,h0,tig,rem,l,h0,re)- returns a PL for gearrack |
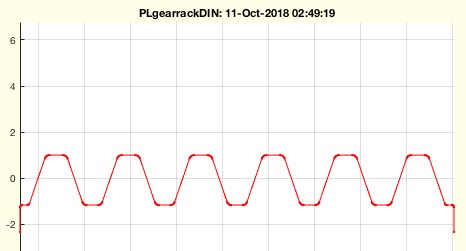 | % PLgearrackDIN(m,l,h0,tig,rem,l,h0,re) - returns a PL for gearrack % (by Tim Lueth, VLFL-Lib, 2018-OKT-11 as class: MECHANICAL PROCEDURES) % % Introduced first in SolidGeometry 4.3 % % See also: PLgearrackDIN, PLgearDIN, PLthreadDIN, SGofCPLrota % % [PL,l,p]=PLgearrackDIN([m,l,h0,tig,rem,l,h0,re]) % === INPUT PARAMETERS === % m: modul % l: number of teeth if integer; maximal length if real; % h0: optional height % tig: false=tooth a origin; true=gap at origin % rem: rounded edges; default is false % l: % h0: % re: % === OUTPUT RESULTS ====== % PL: Point list [ n x 3] % l: exact length % p: tooth + gap size = pi * m % % EXAMPLE: % PLgearrackDIN(1) % PLgearrackDIN(1,10) % PLgearrackDIN(1,10.001,10) % PLgearrackDIN(1,4,'',false) % PLgearrackDIN(1,4,'',true) % PLgearrackDIN(1,4,'',true,true) % % See also: PLgearrackDIN, PLgearDIN, PLthreadDIN, SGofCPLrota % % % Copyright 2018 Tim C. Lueth |
SGgearpairDIN(m,z1,z2,h,R,d)- provides a simple gear ratio stage as Solid Geometry |
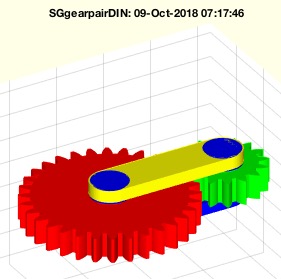 | % SGgearpairDIN(m,z1,z2,h,R,d) - provides a simple gear ratio stage as Solid Geometry % (by Tim Lueth, VLFL-Lib, 2018-OKT-08 as class: MECHANICAL PROCEDURES) % % Introduced first in SolidGeometry 4.3 % % See also: PLgear, PLgearDIN, SGgearDIN, SGspurgear, VLFLgear, % VLFLgearhub4shaft, VLFLinternalgear % % [SG1,SG2,SG3,SG4]=SGgearpairDIN([m,z1,z2,h,R,d]) % === INPUT PARAMETERS === % m: modules % z1: number of teeth 1 % z2: number of teeth 1 % h: height of the gear % R: radius of axle % d: height of the bearing % === OUTPUT RESULTS ====== % SG1: Gear 1 % SG2: Gear 2 % SG3: Bearing 1 % SG4: Bearing Top % % EXAMPLE: % SGgearpairDIN(1,32,16,5); % % See also: PLgear, PLgearDIN, SGgearDIN, SGspurgear, VLFLgear, % VLFLgearhub4shaft, VLFLinternalgear % % % Copyright 2018 Tim C. Lueth |
SGgearDIN(m,z,R,h,tig)- Calculate a gear with the count from 9.12 to 48; for internal and external gears |
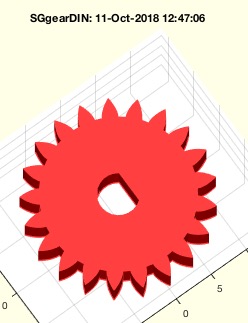 | % SGgearDIN(m,z,R,h,tig) - Calculate a gear with the count from 9.12 to 48; for internal and external gears % (by Tim Lueth, VLFL-Lib, 2018-OKT-08 as class: MECHANICAL PROCEDURES) % % There is much more precise modelling by Yannick Krieger and Matthias % Traeger. % (Status of: 2018-10-09) % % Introduced first in SolidGeometry 4.3 % % See also: PLgear, PLgearDIN, SGgearpairDIN, SGspurgear, VLFLgear, % VLFLgearhub4shaft, VLFLinternalgear % % SG=SGgearDIN([m,z,R,h,tig]) % === INPUT PARAMETERS === % m: modul; negativ values for internal gears % z: number of teeth % R: radius for a shaft/axle or CPL for inner contour % h: height of the gear % tig: 0/1 for the position if the first tooth at zeros degree % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGgearDIN (+1,26) % SGgearDIN (+1,26,3) % SGgearDIN (+1,26,CPLofmotorshaft) % SGgearDIN (-1,26) % SGgearDIN (+1,26,'','',1) % SGgearDIN (+1,26,'','',0) % % See also: PLgear, PLgearDIN, SGgearpairDIN, SGspurgear, VLFLgear, % VLFLgearhub4shaft, VLFLinternalgear % % % Copyright 2018 Tim C. Lueth |
TplanesofVLFLfacets(VL,FL)- returns the HT matrices for the facets from center and normal |
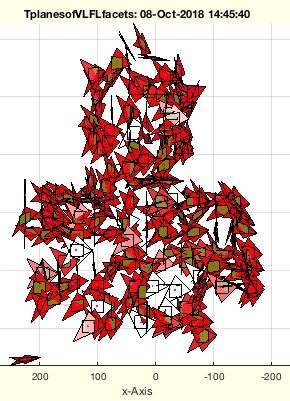 | % TplanesofVLFLfacets(VL,FL) - returns the HT matrices for the facets from center and normal % (by Tim Lueth, VLFL-Lib, 2018-OKT-08 as class: ANALYTICAL GEOMETRY) % % This fnctn calculates the center of each facet and the normal and % creates % a HT matrix for the center point and a % Vertex facet list from the center and a larger edge length (Status of: % 2018-10-08) % % Introduced first in SolidGeometry 4.3 % % See also: TplanesofPCnormals % % [T,DVL,DFL]=TplanesofVLFLfacets(VL,FL) % === INPUT PARAMETERS === % VL: Vertex list or Solid Geometry % FL: Facet list % === OUTPUT RESULTS ====== % T: cell list of transformation matrices % DVL: Triangle vertex list % DFL: fTriangle vertex listacet list % % EXAMPLE: % loadweb IntelRealsense.mat % loads vertex lists from RS300 and RS415 % VLdownsample(VL_D415a,30); NVL=ans; whos('VL_D415a'), whos ('NVL') % TplanesofVLFLfacets(NVL,FL) % % See also: TplanesofPCnormals % % % Copyright 2018 Tim C. Lueth |
TplanesofPCnormals(pc)- returns the HT matrices for the points and normals |
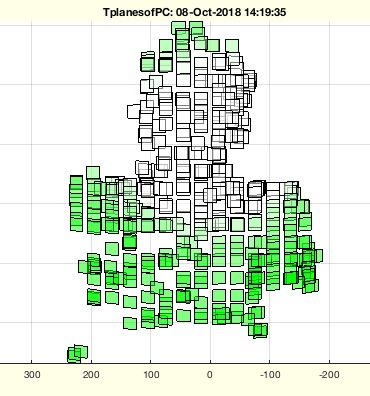 | % TplanesofPCnormals(pc) - returns the HT matrices for the points and normals % (by Tim Lueth, VLFL-Lib, 2018-OKT-08 as class: ANALYTICAL GEOMETRY) % % in fact this fnctn makes quite clear that the vertex normals of a point % cloud are all oriented into the center of the origin (Status of: % 2018-10-08) % % Introduced first in SolidGeometry 4.3 % % See also: TplanesofVLFLfacets % % [T,DVL,FL]=TplanesofPCnormals(pc) % === INPUT PARAMETERS === % pc: point cloud or vertex list % === OUTPUT RESULTS ====== % T: cell list of transformation matrices % DVL: Triangle vertex list % FL: facet list % % EXAMPLE: % loadweb IntelRealsense.mat % loads vertex lists from RS300 and RS415 % VLdownsample(VL_D415a,30); NVL=ans; whos('VL_D415a'), whos ('NVL') % TplanesofPCnormals(NVL) % % See also: TplanesofVLFLfacets % % % Copyright 2018 Tim C. Lueth |
CPLofPLalphashape(PL,)- returns a closed polygon contour around a point list using alphashape |
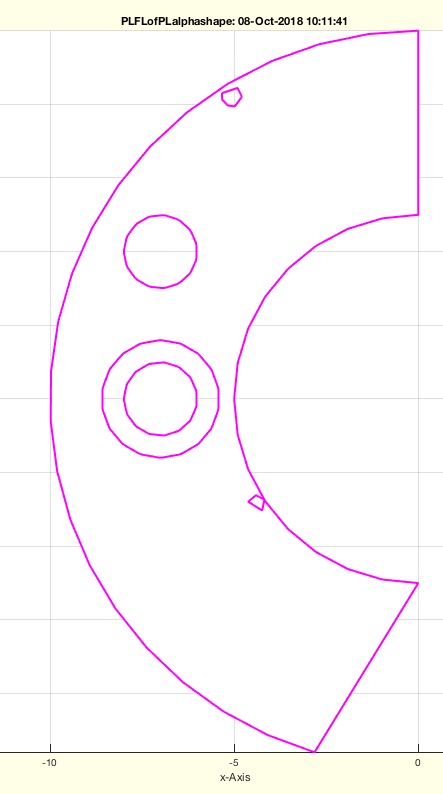 | % CPLofPLalphashape(PL,) - returns a closed polygon contour around a point list using alphashape % (by Tim Lueth, VLFL-Lib, 2018-OKT-08 as class: SURFACES) % % same as PLFLofPLalphashape (Status of: 2018-10-08) % % Introduced first in SolidGeometry 4.3 % % See also: PLFLofPLalphashape % % [CPL,PL,FL,EL,CEL]=CPLofPLalphashape(PL,[]) % === INPUT PARAMETERS === % PL: Original Point cloud % === OUTPUT RESULTS ====== % CPL: Closed Polygon List of contour (endpoint=startpoint) % PL: Point list (doubled entries removed) % FL: Facet List % EL: Edge list of free boundary sorted % CEL: Contour index list % % EXAMPLE: % pc=PCofSG(SGsample(25),30000); PL=pc.Location(:,1:2); % CPLofPLalphashape(PL); % % See also: PLFLofPLalphashape % % % Copyright 2018 Tim C. Lueth |
VLdownsample(VL,gs,ongrid)- returns a downsampled vertex list |
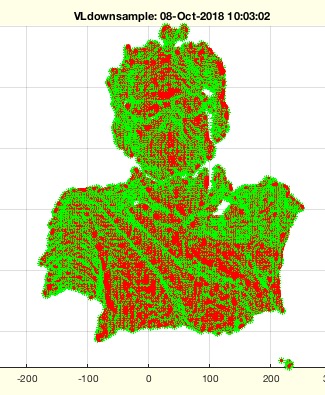 | % VLdownsample(VL,gs,ongrid) - returns a downsampled vertex list % (by Tim Lueth, VLFL-Lib, 2018-OKT-08 as class: SR300) % % Introduced first in SolidGeometry 4.3 % % See also: pcdownsample, unique % % [NVL,a,b]=VLdownsample(VL,[gs,ongrid]) % === INPUT PARAMETERS === % VL: Vertex list % gs: grid size; default is 1 percent (100x100x100) = 10000 % ongrid: 'grid','mean','stable','first','last' % === OUTPUT RESULTS ====== % NVL: New vertex list % a: selection index of VL % b: mapping index of VL % % EXAMPLE: % loadweb IntelRealsense.mat % VLdownsample(VL_D415a); NVL=ans; whos('VL_D415a'), whos ('NVL') % % See also: pcdownsample, unique % % % Copyright 2018 Tim C. Lueth |
PCfindNearestNeighbors(pc,ind,nr,al)- returns for a pointcloud a list of direct neighbors, distances and areas |
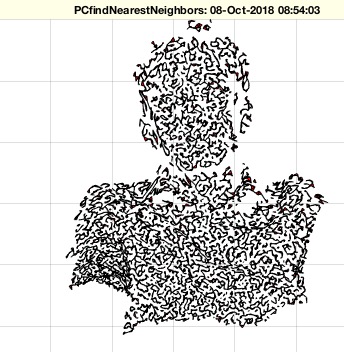 | % PCfindNearestNeighbors(pc,ind,nr,al) - returns for a pointcloud a list of direct neighbors, distances and areas % (by Tim Lueth, VLFL-Lib, 2018-OKT-08 as class: SR300) % % Since the nearest neighbor search is time consuming, it makes sense to % reduce the number of points to less than 10000. % uses findNearestNeighbors from class pointCLoud. (Status of: 2018-10-08) % % Introduced first in SolidGeometry 4.3 % % See also: findNearestNeighbors % % [NIL,DIL,OA,AL,pc]=PCfindNearestNeighbors(pc,[ind,nr,al]) % === INPUT PARAMETERS === % pc: point cloud or vertex list % ind: indices' default is all % nr: number of neighbors; default is 3 % al: minimal angle for triangles; default is zero % === OUTPUT RESULTS ====== % NIL: Neighbor index list [n x nr] = Facet list for nr==3 % DIL: Neighbor distance list [n x nr] % OA: point cloud % AL: Area list % pc: point cloud % % EXAMPLE: % loadweb IntelRealsense.mat % loads vertex lists from RS300 and RS415 % VLdownsample(VL_D415a); NVL=ans; whos('VL_D415a'), whos ('NVL') % PCfindNearestNeighbors(NVL); % % See also: findNearestNeighbors % % % Copyright 2018 Tim C. Lueth |
planedistanceofT(T,VL)- returns the distance of a vertex list to a plane in HT coordinate form |
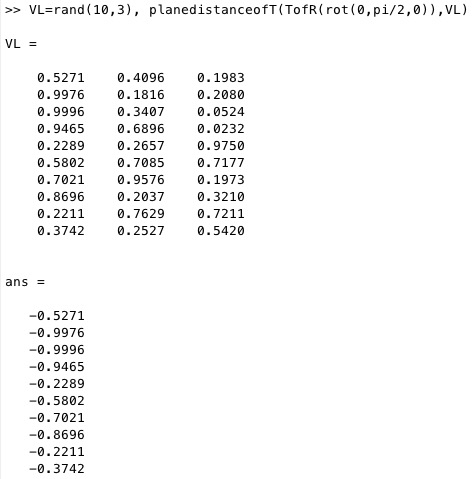 | % planedistanceofT(T,VL) - returns the distance of a vertex list to a plane in HT coordinate form % (by Tim Lueth, VLFL-Lib, 2018-OKT-07 as class: ANALYTICAL GEOMETRY) % % high speed fnctn % In contrast to distT, this fnctn returns only the distance value % (Status of: 2018-10-08) % % Introduced first in SolidGeometry 4.3 % % See also: distE, distT, VLisbelowT % % D=planedistanceofT(T,VL) % === INPUT PARAMETERS === % T: Transformationmatrix 4x4 % VL: Vertex list % === OUTPUT RESULTS ====== % D: Distance vector % % EXAMPLE: % VL=rand(10,3), planedistanceofT(TofR(rot(0,pi/2,0)),VL) % % % See also: distE, distT, VLisbelowT % % % Copyright 2018-2021 Tim C. Lueth |
PLFLofPLalphashape(PL,r)- returns a facet list from a point list using alphashape |
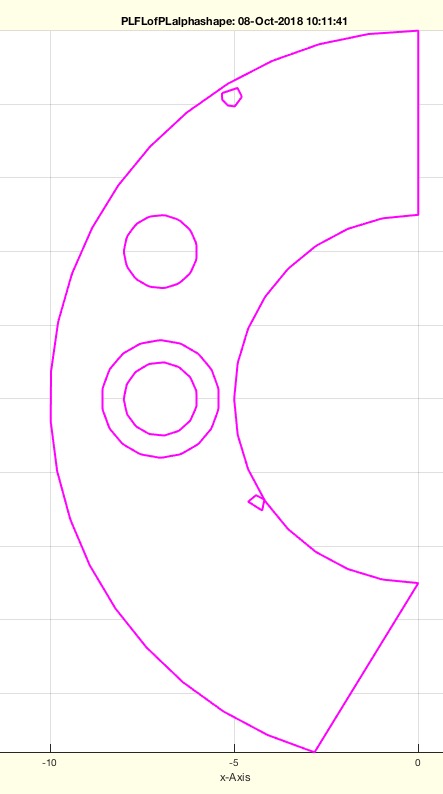 | % PLFLofPLalphashape(PL,r) - returns a facet list from a point list using alphashape % (by Tim Lueth, VLFL-Lib, 2018-OKT-07 as class: SURFACES) % % This fnctn is helpful to % creates a closed surface from a point list (Status of: 2018-10-08) % % Introduced first in SolidGeometry 4.3 % % See also: CPLofPLalphashape % % [PL,FL,CPL,EL,CEL]=PLFLofPLalphashape(PL,[r]) % === INPUT PARAMETERS === % PL: Original Point cloud % r: optional radius for alphashape triangulation % === OUTPUT RESULTS ====== % PL: Point list (doubled entries removed) % FL: Facet List % CPL: Closed Polygon List of contour (endpoint=startpoint) % EL: Edge list of free boundary sorted % CEL: Contour index list % % EXAMPLE: % pc=PCofSG(SGsample(25),30000); PL=pc.Location(:,1:2); % PLFLofPLalphashape(PL); % % See also: CPLofPLalphashape % % % Copyright 2018 Tim C. Lueth |
imageofgca(h,rs)- returns the image snapshot of the currect gca |
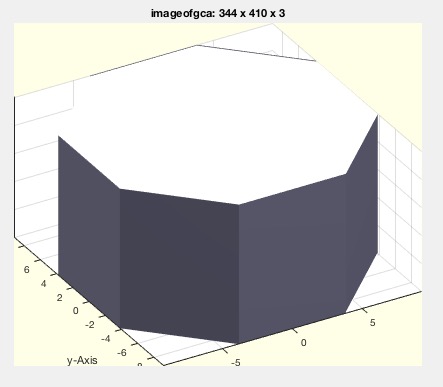 | % imageofgca(h,rs) - returns the image snapshot of the currect gca % (by Tim Lueth, VLFL-Lib, 2018-OKT-05 as class: VISUALIZATION) % % similar to I=getframe(gca); (Status of: 2018-10-07) % % Introduced first in SolidGeometry 4.3 % % See also: getframe % % I=imageofgca([h,rs]) % === INPUT PARAMETERS === % h: optional different handle than gca such as gcf % rs: resize parameter, see imresize % === OUTPUT RESULTS ====== % I: Image of gca % % EXAMPLE: % SGsample(25); % imageofgca; I=ans; whos I % % See also: getframe % % % Copyright 2018 Tim C. Lueth |
PCofSG(SG,nmax,vgrid,vnoise)- returns a point cloud from a SG with defined number of points and noise |
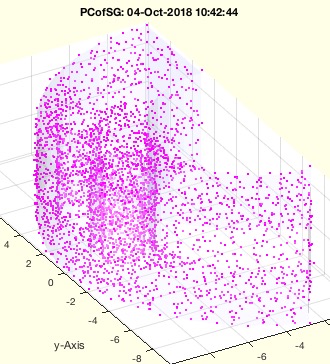 | % PCofSG(SG,nmax,vgrid,vnoise) - returns a point cloud from a SG with defined number of points and noise % (by Tim Lueth, VLFL-Lib, 2018-OKT-04 as class: SR300) % % This recursive fnctns aborts if there is no change to create more % points. % To speed up this recursive procedure set vgrid to zero, other wise a % distribution of vgrid is tried. % The sample points are created using VLFLaddfacetcenterpoints. % % could be improved by an addition view point vector to use only facets % that can be seen from a view points (Status of: 2018-10-04) % % Introduced first in SolidGeometry 4.3 % % See also: VLFLaddfacetcenterpoints % % [pc,NL]=PCofSG(SG,[nmax,vgrid,vnoise]) % === INPUT PARAMETERS === % SG: Solid Geometry % nmax: expected number of points; default is 30000 % vgrid: grid size; defaults is 1/100 of sofBB; quick response with 0 % vnoise: vertex noise in percent! 1 == 1/100 of sofBB; default is 0; % === OUTPUT RESULTS ====== % pc: point cloud % NL: normal vector list of point cloud % % EXAMPLE: % PCofSG(SGbox([30,20,10]),3000); % PCofSG(SGsample(25),3000); % % % See also: VLFLaddfacetcenterpoints % % % Copyright 2018 Tim C. Lueth |
VLFLaddfacetcenterpoints(VL,FL,nn,md);- creates additional vertices in the middle of each facet |
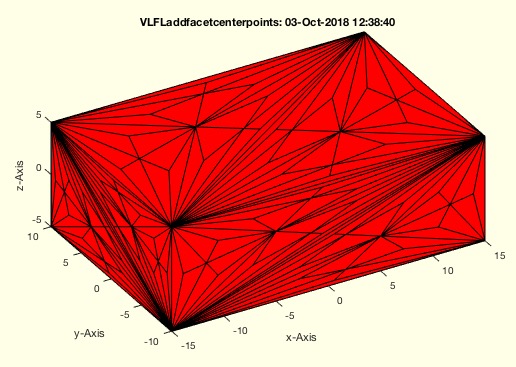 | % VLFLaddfacetcenterpoints(VL,FL,nn,md); - creates additional vertices in the middle of each facet % (by Tim Lueth, VLFL-Lib, 2018-OKT-03 as class: SURFACES) % % the number of facets is length(FL)*3 % the number of vertices is length(VL) + length(FL)*3 % Poinct cloud of SG (Status of: 2018-10-08) % % Introduced first in SolidGeometry 4.3 % % See also: PCofSG % % [NVL,NFL,NNVL]=VLFLaddfacetcenterpoints(VL,FL,[nn,md]); % === INPUT PARAMETERS === % VL: vertex list % FL: facet list % nn: recursive number of calls; default is 1 % md: minimum distance between old and new points; default is 0 % === OUTPUT RESULTS ====== % NVL: New vertex list % NFL: New facet list % NNVL: % % EXAMPLE: % A=SGbox([30,20,10]); VL=A.VL; FL=A.FL; % VLFLaddfacetcenterpoints(VL,FL); % VLFLaddfacetcenterpoints(VL,FL,5); % % % See also: PCofSG % % % Copyright 2018-2020 Tim C. Lueth |
iconfilesearch(sterm)- searches and shows in the original matlab directories for icon files that contain a string term |
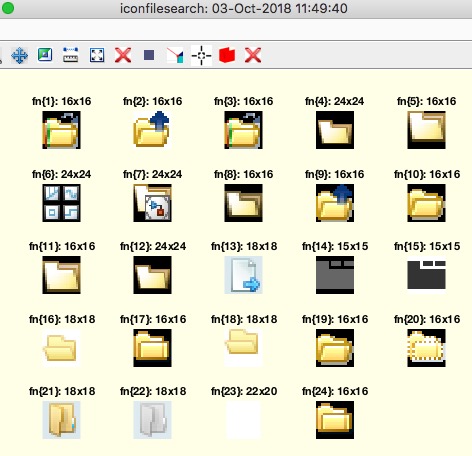 | % iconfilesearch(sterm) - searches and shows in the original matlab directories for icon files that contain a string term % (by Tim Lueth, VLFL-Lib, 2018-OKT-03 as class: USER INTERFACE) % % Introduced first in SolidGeometry 4.3 % % See also: app_2012_11_09, SGwriteIcon, iconofCPL, iconlibTL % % fn=iconfilesearch([sterm]) % === INPUT PARAMETERS === % sterm: search term of cell list of icon files % === OUTPUT RESULTS ====== % fn: list of files within the matlab directory % % EXAMPLE: iconfilesearch('open'); fnames=ans % iconfilesearch(fnames) % iconfilesearch; a=ans % iconfilesearch(a,'stop') % % % See also: app_2012_11_09, SGwriteIcon, iconofCPL, iconlibTL % % % Copyright 2018-2022 Tim C. Lueth |
PCofVL(VL)- returns a points cloud including NL from Vertex List |
 | % PCofVL(VL) - returns a points cloud including NL from Vertex List % (by Tim Lueth, VLFL-Lib, 2018-OKT-02 as class: SR300) % % Introduced first in SolidGeometry 4.3 % % See also: PCofVL, PCplot, PCfindplanes % % pc=PCofVL(VL) % === INPUT PARAMETERS === % VL: Vertex list % === OUTPUT RESULTS ====== % pc: point cloud including normals % % EXAMPLE: % loadweb ('AAruffo_surf.mat'); pc=PCofVL(SG1.VL); % % See also: PCofVL, PCplot, PCfindplanes % % % Copyright 2018 Tim C. Lueth |
PCfindradiusangle(pc,i,amax,rmax)- returns vertices and facets of surface near a point of a point cloud |
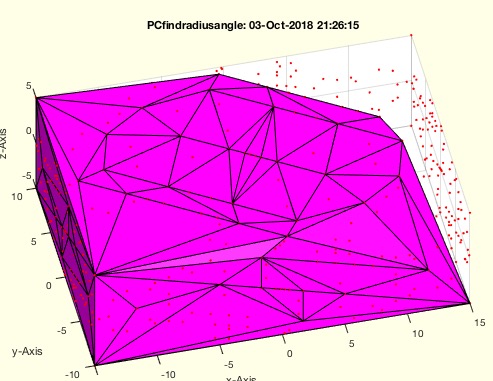 | % PCfindradiusangle(pc,i,amax,rmax) - returns vertices and facets of surface near a point of a point cloud % (by Tim Lueth, VLFL-Lib, 2018-OKT-02 as class: SR300) % % Introduced first in SolidGeometry 4.3 % % See also: findNeighborsInRadius, findNearestNeighbors % % [VL,FL]=PCfindradiusangle(pc,i,[amax,rmax]) % === INPUT PARAMETERS === % pc: point cloud % i: index in point cloud % amax: allowed angle deviation of vertex in radiant; default is pi/4 % rmax: radius to consider around vertex i; default is 10000 % === OUTPUT RESULTS ====== % VL: Vertex list % FL: Facet list % % EXAMPLE: % loadweb ('AAruffo_surf.mat'); pc=PCofVL(SG1.VL); % PCfindradiusangle (pc,7000,pi/1.3,200) % PCfindradiusangle (pc,300) % PCofSG(SGsample(25),3000,.2,0); pc=ans; % PCfindradiusangle (pc,300,pi/2) % % % See also: findNeighborsInRadius, findNearestNeighbors % % % Copyright 2018 Tim C. Lueth |
PCplot(PC)- plots a point cloud or a cell list of point clouds without any registration |
 | % PCplot(PC) - plots a point cloud or a cell list of point clouds without any registration % (by Tim Lueth, VLFL-Lib, 2018-OKT-01 as class: SR300) % % Introduced first in SolidGeometry 4.3 % % See also: PCofVL, PCfindplanes % % PCplot(PC) % === INPUT PARAMETERS === % PC: cell list of point clouds % % EXAMPLE: % SR300getPointclouds(10); PC=ans; % PCplot(PC) % % See also: PCofVL, PCfindplanes % % % Copyright 2018 Tim C. Lueth |
SGfiguretopbuttons(nrx,callback,bstyle,icfile,bsize,tiptext)- creates a button row in the current figure |
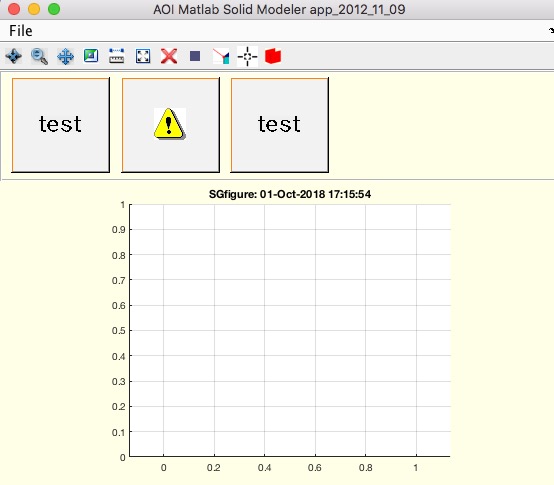 | % SGfiguretopbuttons(nrx,callback,bstyle,icfile,bsize,tiptext) - creates a button row in the current figure % (by Alexandra Mercader, VLFL-Lib, 2018-OKT-01 as class: USER INTERFACE) % % The fnctn is based on the concept of uibuttongroup and uicontrol. It % supports the % 'Style', % 'CData', % 'Callback' % 'Tooltip' % % (Status of: 2018-10-01) % % See also: uibuttongroup, uicontrol % % [hf]=SGfiguretopbuttons(nrx,[callback,bstyle,icfile,bsize,tiptext]) % === INPUT PARAMETERS === % nrx: Nr of the % callback: desired fnctn to call if pressed; default is 'beep' % bstyle: button style; default is 'pushbutton' % icfile: icon file or text % bsize: button size % tiptext: description text at tool tip % === OUTPUT RESULTS ====== % [hf]: % % EXAMPLE: % SGfigure; % SGfiguretopbuttons(1:3,'','','test',100,'helptext'); % SGfiguretopbuttons(2,'','','warning.gif',100,'Makes Beep'); % % See also: uibuttongroup, uicontrol % |
iconlibs- returns MATLAB Iconslibs |
 | % iconlibs - returns MATLAB Iconslibs % (by Alexandra Mercader, VLFL-Lib, 2018-OKT-01 as class: USER INTERFACE) % % See also: app_2012_11_09, SGwriteIcon, iconfilesearch, iconofCPL, % iconlibTL % % iconlibs % % See also: app_2012_11_09, SGwriteIcon, iconfilesearch, iconofCPL, % iconlibTL % |
PCfindplanes(PC)- EXPERIMENT TO SHOW THE PLANES IN AN IMAGE |
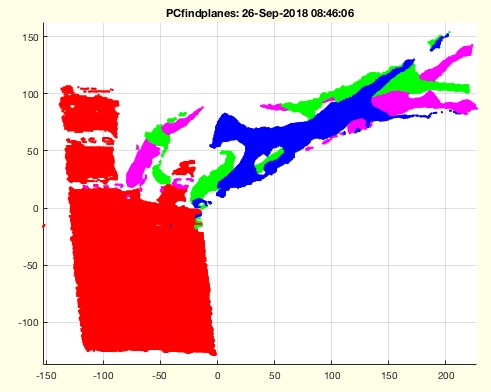 | % PCfindplanes(PC) - EXPERIMENT TO SHOW THE PLANES IN AN IMAGE % (by Tim Lueth, VLFL-Lib, 2018-SEP-26 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 4.3 % % See also: PCofVL, PCplot % % PCfindplanes(PC) % === INPUT PARAMETERS === % PC: % % See also: PCofVL, PCplot % % % Copyright 2018 Tim C. Lueth |
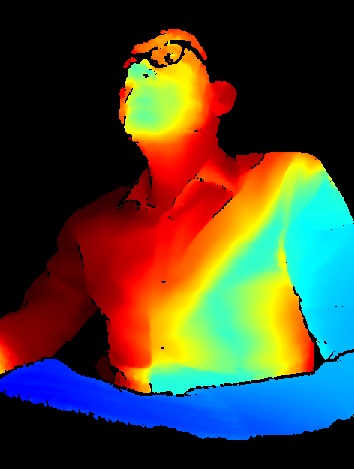
SR300getVLFL(zl)- returns a surface from the surface camera |
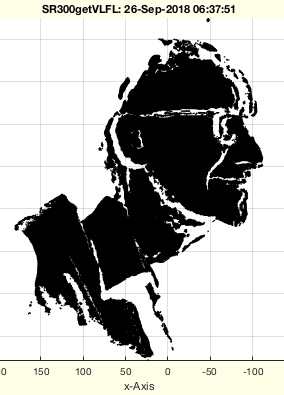 | % SR300getVLFL(zl) - returns a surface from the surface camera % (by Tim Lueth, VLFL-Lib, 2018-SEP-26 as class: SR300) % % Introduced first in SolidGeometry 4.3 % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300videoimage, SR300allimages, SR300getVL % % SG=SR300getVLFL([zl]) % === INPUT PARAMETERS === % zl: zlimitation; default is 400 % === OUTPUT RESULTS ====== % SG: Struct with vertices VL and Facets FL % % EXAMPLE: % SR300getVLFL; SG=ans; % SGfigure; SGplot(SG); view(-180,-90); % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300videoimage, SR300allimages, SR300getVL % % % Copyright 2018 Tim C. Lueth |
bplot(VL,bs,)- plots grid boxes at a desired position |
 | % bplot(VL,bs,) - plots grid boxes at a desired position % (by Tim Lueth, VLFL-Lib, 2018-SEP-25 as class: VISUALIZATION) % % Introduced first in SolidGeometry 4.3 % % See also: aplot, pplot, lplot, tfplot, tlplot, slplot, plotTP, plotL, % plotT, T2Plot, textP, textT, textVL % % h=bplot(VL,bs,[]) % === INPUT PARAMETERS === % VL: Vertex list % bs: Box size % === OUTPUT RESULTS ====== % h: handle to graphics object % % EXAMPLE: % SGfigure; h=bplot([0 0 0],20,'m--',2); view(-30,30); pause(1); delete(h) % VL=rand(10,3)*100; h=bplot(VL,20,'m--',2); view(-30,30); % % See also: aplot, pplot, lplot, tfplot, tlplot, slplot, plotTP, plotL, % plotT, T2Plot, textP, textT, textVL % % % Copyright 2018 Tim C. Lueth |
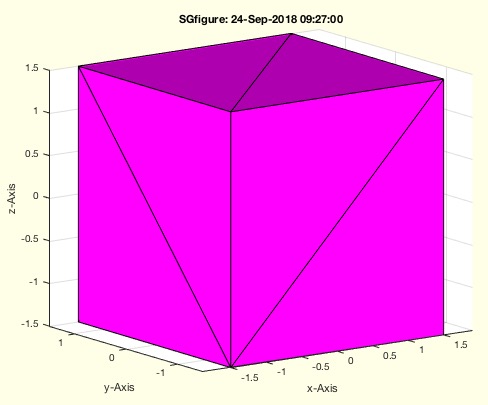
VMofVL(VL,res)- returns a Voxel model from a vertex list |
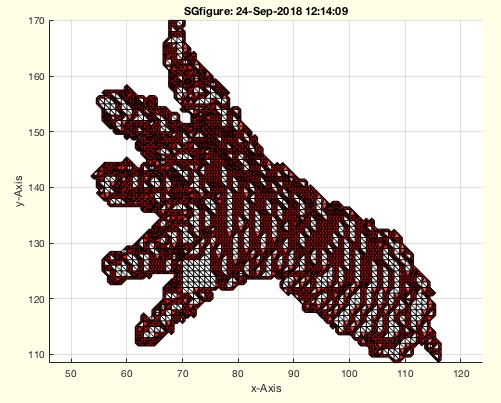 | % VMofVL(VL,res) - returns a Voxel model from a vertex list % (by Tim Lueth, VLFL-Lib, 2018-SEP-24 as class: VOXELS) % % Introduced first in SolidGeometry 4.3 % % See also: VLofVM, SGofVMdelaunay, SGofVMisosurface, SGofVMmarchcube % % [VM,vs,SG]=VMofVL(VL,[res]) % === INPUT PARAMETERS === % VL: Vertex list % res: Optional resolution; default is 2m % === OUTPUT RESULTS ====== % VM: Voxel model % vs: size of voxel % SG: optional Solid Geometry % % EXAMPLE: % SR300getVL; VL=ans; SGfigure; VLplot(VL,'.'); view(0,-90); % [a,b,c]=VMofVL(VL,5); % SGc=SGsurfaces(c); % for i=1:length(SGc); A(i)=SGarea(SGc{i}); end; Asum=sum(A); m=find(A==max(A)) % SGfigure; SGplot(SGc{m}); % % See also: VLofVM, SGofVMdelaunay, SGofVMisosurface, SGofVMmarchcube % % % Copyright 2018 Tim C. Lueth |
figurerotate (mtime,angle)- rotates the current figure to show 3D effects |
 | % figurerotate (mtime,angle) - rotates the current figure to show 3D effects % (by Tim Lueth, VLFL-Lib, 2018-SEP-24 as class: VISUALIZATION) % % by slowly rotation surfaces, even 2D surface are seen as 3D surfaces % (Status of: 2022-05-04) % % Introduced first in SolidGeometry 4.3 % % See also: SGfigurevideo, SGfiguremovie, viewsmooth, Videoquickrotate3D, % animatego, drawnowvid % % figurerotate([mtime,angle]) % === INPUT PARAMETERS === % mtime: minimal rotation time; default is 1 % angle: rotation angle; default is 5 degree % % EXAMPLE: % SGfigure(SGbox(3)); % Show a simple box % figurerotate(5) % rotate for 5 seconds % % % See also: SGfigurevideo, SGfiguremovie, viewsmooth, Videoquickrotate3D, % animatego, drawnowvid % % % Copyright 2018-2022 Tim C. Lueth |
SR300allimages- returns a depth image 640x480 from the IntelRealSense300 camera |
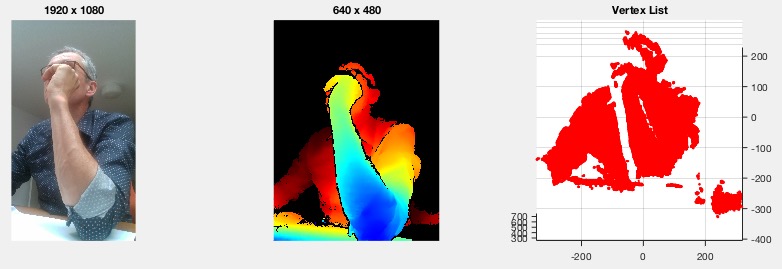 | % SR300allimages - returns a depth image 640x480 from the IntelRealSense300 camera % (by Tim Lueth, VLFL-Lib, 2018-SEP-24 as class: SR300) % % The IntelRealSense300 is very sensitive to bright ambient light and % 50Hz fluctuations in ambient light. Dark ambient light is better than % bright ambient light. (Status of: 2018-09-24) % % Introduced first in SolidGeometry 4.3 % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300videoimage, SR300getVL % % [vimg,dimg,VL]=SR300allimages % === OUTPUT RESULTS ====== % vimg: 1920 x 1080 x uint3 - color image % dimg: 640x 480 x 3 uint8 - depth image % VL: Vertex List of surface points - [n x 3] % % EXAMPLE: % SR300start % SR300allimages; [a,b,c]=SR300allimages; whos a, whos b , whos c % VLmindist(c); view(-90,-90); VLplot(VL,'r.'); % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300videoimage, SR300getVL % % % Copyright 2018 Tim C. Lueth |
SR300videoimage- returns a video image 1920x1080 from the IntelRealSense300 camera |
 | % SR300videoimage - returns a video image 1920x1080 from the IntelRealSense300 camera % (by Tim Lueth, VLFL-Lib, 2018-SEP-23 as class: SR300) % % The IntelRealSense300 is very sensitive to bright ambient light and % 50Hz fluctuations in ambient light. Dark ambient light is better than % bright ambient light. (Status of: 2018-09-24) % % Introduced first in SolidGeometry 4.3 % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300allimages, SR300getVL % % [img,data]=SR300videoimage % === OUTPUT RESULTS ====== % img: 920x1080x3 uint8 % data: original data of the camera % % EXAMPLE: % SR300start % SR300videoimage; a=ans; whos a, tic, b=imresize(a,[480,640]); toc, whos b % imshow(rot90(b,-1)) % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300allimages, SR300getVL % % % Copyright 2018 Tim C. Lueth |
SR300stop- initializes the Intel RealSense 300 Scanner and creates a global struct IntelRealSense300 |
 | % SR300stop - initializes the Intel RealSense 300 Scanner and creates a global struct IntelRealSense300 % (by Tim Lueth, VLFL-Lib, 2018-SEP-23 as class: SR300) % % Stops the pipline of global struct named: IntelRealSense300 % (Status of: 2018-09-24) % % Introduced first in SolidGeometry 4.3 % % See also: SR300install, SR300start, SR300depthimage, SR300videoimage, % SR300allimages, SR300getVL % % SR300stop % % EXAMPLE: % SR300start; % SR300depthimage; % SR300stop; % SR300stop; % % See also: SR300install, SR300start, SR300depthimage, SR300videoimage, % SR300allimages, SR300getVL % % % Copyright 2018 Tim C. Lueth |
matlabtoolboxdir- returns the default matlab add-on toolbox directory |
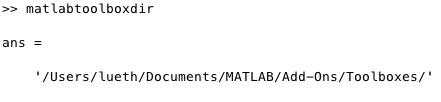 | % matlabtoolboxdir - returns the default matlab add-on toolbox directory % (by Tim Lueth, VLFL-Lib, 2018-SEP-23 as class: FILE HANDLING) % % On mac: '/Users/lueth/Documents/MATLAB/Add-Ons/Toolboxes/' % (Status of: 2018-09-23) % % Introduced first in SolidGeometry 4.3 % % See also: desktopdir, pcodedirTL, smbFilename, smbPSLibname, workdir, % expname, matlabdir % % mldir=matlabtoolboxdir % === OUTPUT RESULTS ====== % mldir: default user matlab add-on toolbox directory % % EXAMPLE: % matlabtoolboxdir, dir (matlabtoolboxdir) % % See also: desktopdir, pcodedirTL, smbFilename, smbPSLibname, workdir, % expname, matlabdir % % % Copyright 2018 Tim C. Lueth |
matlabdir- returns the default matlab directory that is also used for custom toolboxes |
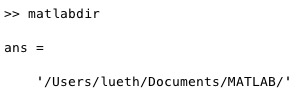 | % matlabdir - returns the default matlab directory that is also used for custom toolboxes % (by Tim Lueth, VLFL-Lib, 2018-SEP-23 as class: FILE HANDLING) % % On mac: '/Users/lueth/Documents/MATLAB/' % (Status of: 2018-09-23) % % Introduced first in SolidGeometry 4.3 % % See also: desktopdir, pcodedirTL, smbFilename, smbPSLibname, workdir, % expname, matlabtoolboxdir % % mldir=matlabdir % === OUTPUT RESULTS ====== % mldir: default user matlab directory % % EXAMPLE: % matlabdir, dir (matlabdir) % % See also: desktopdir, pcodedirTL, smbFilename, smbPSLibname, workdir, % expname, matlabtoolboxdir % % % Copyright 2018 Tim C. Lueth |
SR300depthimage- returns a depth image 640x480 from the IntelRealSense300 camera |
 | % SR300depthimage - returns a depth image 640x480 from the IntelRealSense300 camera % (by Tim Lueth, VLFL-Lib, 2018-SEP-22 as class: SR300) % % The IntelRealSense300 is very sensitive to bright ambient light and % 50Hz fluctuations in ambient light. Dark ambient light is better than % bright ambient light. (Status of: 2018-09-24) % % Introduced first in SolidGeometry 4.3 % % See also: SR300install, SR300stop, SR300start, SR300videoimage, % SR300allimages, SR300getVL % % [img,data]=SR300depthimage % === OUTPUT RESULTS ====== % img: 480x640x3 uint8 % data: original data of the camera % % EXAMPLE: % SR300start % SR300depthimage % [I,d]=SR300depthimage; whos I, whos d % imshow(SR300depthimage); % % See also: SR300install, SR300stop, SR300start, SR300videoimage, % SR300allimages, SR300getVL % % % Copyright 2018 Tim C. Lueth |
SR300install- downloads from TUM-MIMED the Intel Realsense +300 driver and installs it on MAC or WIN |
 | % SR300install - downloads from TUM-MIMED the Intel Realsense +300 driver and installs it on MAC or WIN % (by Tim Lueth, Christian Dietz, Samuel Detzel , VLFL-Lib, 2018-SEP-18 % as class: SR300) % % After calling this fnctn once (takes about 5 seconds), you should be % able to connect the Sensor using the USB cable an to use it immedeatly % with Matlab. % Samuel Detzel and Christian Dietz prepared a zip file on the TUM Mimed % www-Server that can be downloaded and automatically installed by this % fnctn for Mac and Win. % There are also 2 fnctns: SR300depth_example and SR300pointcloud_example % in the downloaded ZIP file. % Nevertheless, the SR300 is integrated into the SG-Lib 4.3 and therefor % all other fnctn belong to the SR-Lib Toolbox. % See also at: % https://www.mouser.de/pdfdocs/intel_realsense_camera_sr300.pdf % (Status of: 2018-09-24) % % Introduced first in SolidGeometry 4.3 % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300videoimage, SR300allimages, SR300getVL % % SR300install % % EXAMPLE: % SR300install % SR300depth_example % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300videoimage, SR300allimages, SR300getVL % % % Copyright 2018 Tim C. Lueth |
SR300start- initializes the Intel RealSense 300 Scanner and creates a global struct IntelRealSense300 |
 | % SR300start - initializes the Intel RealSense 300 Scanner and creates a global struct IntelRealSense300 % (by Samuel Detzel, VLFL-Lib, 2018-SEP-17 as class: SR300) % % (Takes at least 3 seconds!) % This fnctn uses the "librealsense2 class library" developed by by Lior % Ramati, lior.ramati@intel.com, which was downloaded from % https://github.com/IntelRealSense/librealsense in September 2018. % Some additional required file for simple Matlab inetgration on % PC/MAC/Linux were added by Samuel Detzel and Christian Dietz at TU % Munich. The complete package can be downloaded by the command % SR3300install which is located at matlab crentral. % The classe library is located in the directory +realsense. % The global variable is named: IntelRealSense300 % (Status of: 2018-09-24) % % See also: SR300install, SR300stop, SR300depthimage, SR300videoimage, % SR300allimages, SR300getVL % % SR300start % % EXAMPLE: % SR300start % SR300getVL % VL=SR300getVL; SGfigure; VLplot(VL,'.'); view(0,-90); % SGfiguremovie % SGofVLalphaShape(VL,5) % % See also: SR300install, SR300stop, SR300depthimage, SR300videoimage, % SR300allimages, SR300getVL % |
SR300getVL(zlim)- return a VL of the currect Realsesen |
 | % SR300getVL(zlim) - return a VL of the currect Realsesen % (by Samuel Detzel and Tim Lueth, VLFL-Lib, 2018-SEP-17 as class: SR300) % % Introduced first in SolidGeometry 4.3 % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300videoimage, SR300allimages % % [VL,VLA]=SR300getVL([zlim]) % === INPUT PARAMETERS === % zlim: depth limit for taken z values % === OUTPUT RESULTS ====== % VL: Vertex List of selected depth % VLA: Complete Vertex List % % EXAMPLE: % SR300start % SR300getVL % VL=SR300getVL; SGfigure; VLplot(VL,'.'); view(0,-90); % SGfiguremovie % SGofVLalphaShape(VL,5) % % See also: SR300install, SR300stop, SR300start, SR300depthimage, % SR300videoimage, SR300allimages % % % Copyright 2018 Tim C. Lueth |
togglefig- toggels the position of the current SGfigure |
 | % togglefig - toggels the position of the current SGfigure % (by Tim Lueth, VLFL-Lib, 2018-SEP-15 as class: VISUALIZATION) % % moves a figure by the first call to a default position and at second % back to the original position (Status of: 2018-09-15) % % Introduced first in SolidGeometry 4.3 % % See also: SGfigure, copyfig, SGfigureannotation, SGfiguremovie, subfig, % fullview, pastego, copygo % % togglefig % % EXAMPLE: % SGfigure; set (gcf,'Position',[100 200 300 400]); % togglefig; pause(1); togglefig; pause(1); togglefig % % See also: SGfigure, copyfig, SGfigureannotation, SGfiguremovie, subfig, % fullview, pastego, copygo % % % Copyright 2018-2019 Tim C. Lueth |
camlightTL- deletes all camlights and set three new |
 | % camlightTL - deletes all camlights and set three new % (by Tim Lueth, VLFL-Lib, 2018-SEP-15 as class: VISUALIZATION) % % 2020-08-25 modified and successfully tested for Matlab2020aUpd5 % camlight('headlight','infinite'); ... % camlight('right','infinite');... % camlight('left','infinite');]; (Status of: 2020-07-03) % % Introduced first in SolidGeometry 4.3 % % See also: camlightTL, camplot, camset, selectCameraPosition, showcam, % tcamera, Tofcam, TofcamVLPL, VLFLcamlight, rotate3dlight % % h=camlightTL % === OUTPUT RESULTS ====== % h: handle to three camlights % % EXAMPLE: % SGfigure; SGplot(SGbox(4)); view(-30,30); % camlightTL % % See also: camlightTL, camplot, camset, selectCameraPosition, showcam, % tcamera, Tofcam, TofcamVLPL, VLFLcamlight, rotate3dlight % % % Copyright 2018-2020 Tim C. Lueth |
VLFLcheckselfintersection(VL,FL,csep)- checks an returns the number of self intersecting facets |
 | % VLFLcheckselfintersection(VL,FL,csep) - checks an returns the number of self intersecting facets % (by Tim Lueth, VLFL-Lib, 2018-SEP-14 as class: CHECKING PROCEDURES) % % Introduced first in SolidGeometry 4.3 % % See also: VLFLchecknonmanifoldedges, VLFLchecknonmanifoldvertices, % VLFLcheckmeshlab, VLofVLFLselfIntersection % % [n,d]=VLFLcheckselfintersection(VL,FL,[csep]) % === INPUT PARAMETERS === % VL: Vertex list or SG % FL: Facet List % csep: separate solids before check {true,false}; default is false % === OUTPUT RESULTS ====== % n: number of facets % d: facets list % % EXAMPLE: % VLFLcheckselfintersection(SGsample(36)) % VLofVLFLselfIntersection(SGsample(17),'',true) % VLofVLFLselfIntersection(SGsample(17),'',false) % % See also: VLFLchecknonmanifoldedges, VLFLchecknonmanifoldvertices, % VLFLcheckmeshlab, VLofVLFLselfIntersection % % % Copyright 2018 Tim C. Lueth |
ismemberFL(FLA,FLB)- returns ismember for all three possibilities of a facet list |
 | % ismemberFL(FLA,FLB) - returns ismember for all three possibilities of a facet list % (by Tim Lueth, VLFL-Lib, 2018-SEP-14 as class: EDGE LISTS) % % % % (Status of: 2018-09-14) % % Introduced first in SolidGeometry 4.3 % % See also: ismember, ismembertol % % im=ismemberFL(FLA,FLB) % === INPUT PARAMETERS === % FLA: Facet List A % FLB: Facet List B % === OUTPUT RESULTS ====== % im: ismember result % % EXAMPLE: % FLA=[1 2 3; 4 5 6; 7 8 9]; FLB=[2 3 1; 6 5 4; 9 7 8]; % ismemberFL(FLA,FLB) % % See also: ismember, ismembertol % % % Copyright 2018 Tim C. Lueth |
VLNLplot(VL,NL,vi,c,w)- plots a normal vector list at a vertex list |
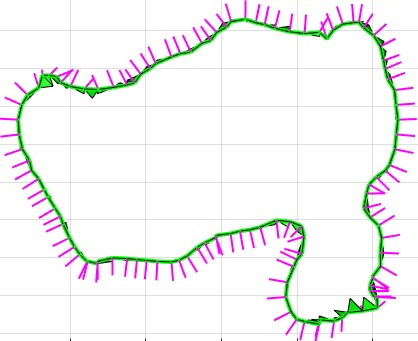 | % VLNLplot(VL,NL,vi,c,w) - plots a normal vector list at a vertex list % (by Tim Lueth, VLFL-Lib, 2018-SEP-13 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 4.3 % % See also: VLplot, VLELplot, VLELplots, VLplotmotion, VLFLplot, % VLFLplotfacets, PLplot, PLELplot, CVLplot, CVLplots % % h=VLNLplot(VL,NL,[vi,c,w]) % === INPUT PARAMETERS === % VL: Vertex list % NL: Normal vector list % vi: optional index selector % c: optional color and line % w: optional line thickness % === OUTPUT RESULTS ====== % h: handle to plot % % EXAMPLE: % A=SGsample(5); NL=VLFLvertexNormal(A); SGfigure; VLNLplot(A.VL,NL); view(-30,30) % VL=rand(100,3)*10; NL=rand(100,3); SGfigure; h=VLNLplot(VL,NL,1:10,'m.-',1) % % See also: VLplot, VLELplot, VLELplots, VLplotmotion, VLFLplot, % VLFLplotfacets, PLplot, PLELplot, CVLplot, CVLplots % % % Copyright 2018 Tim C. Lueth |
VLFLsmoothboundary(VL,FL,al,lr,al2,be)- creates facets to smoothen or closing open boundaries without adding points |
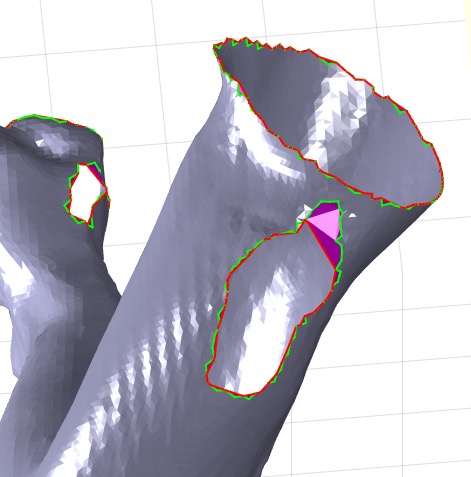 | % VLFLsmoothboundary(VL,FL,al,lr,al2,be) - creates facets to smoothen or closing open boundaries without adding points % (by Tim Lueth, VLFL-Lib, 2018-SEP-12 as class: SURFACES) % % This fnctn is a recursive fnctn with valuable parameters. % First Parameter 'al' is the bend angle of two edges at a corner point. % al' indicates which is the minimum bend angle at which two edges may be % closed by a triangle. If the angle is small, almost straight lines are % closed by a surface. % The second parameter "lr" excludes triangles when closing, if the edge % lengths do not correspond to special criteria. "lr" specifies the % maximum length ratio of the two legs of a triangle that may still be % closed. If "lr" is less than zero, abs(lr) is the absolute maximum % length of the trough in millimeters. If "lr" is exactly zero, then the % longer of the two legs must not exceed the mean value of all triangular % distances (automatic mode). % The third parameter 'al2' also restricts the triangles to be closed. % Triangles with too little kink angle are not closed if the knee angle % is smaller than 'al2'. % The fourth parameter "be" also restricts the triangles to be closed. It % defines the surface angle difference, i.e. the orientation of the % surface relative to the already existing surfaces. The larger the angle % "be" is, the straighter the triangle walls are which are still allowed % to close. If "be" > pi/1.5 is selected, there are almost only straight % edges left. If "be" is ~ pi/2, then edges with surfaces can be closed % at right angles. % (Status of: 2018-09-15) % % Introduced first in SolidGeometry 4.3 % % See also: VLFLremoveIntersectFacets % % [FL,NFL]=VLFLsmoothboundary(VL,FL,[al,lr,al2,be]) % === INPUT PARAMETERS === % VL: Vertex list % FL: Facet list % al: closing if edge angle is > al; default is pi/4 % lr: leg length maximum ratio; default is 1.5 % al2: minimal angle value for closing; default is 0; % be: required distance angle to parallel walls % === OUTPUT RESULTS ====== % FL: List of old and appended new facets % NFL: List of New facets % % EXAMPLE: % loadweb AAruffo_surf.mat % load some surface data sets % A=SG1; VLFLsmoothboundary(A.VL,A.FL); % A=SG1; VLFLsmoothboundary(A.VL,A.FL,0.01,1000,0,0); % Close all angles - too simple approach % A=SG1; VLFLsmoothboundary(A.VL,A.FL,0.01,1000,0,pi/1.3); % Close all angles if walls are straight % A=SG1; VLFLsmoothboundary(A.VL,A.FL,0.01,0,0,pi/1.3); % Close angles of similar size/wall straight % A=SG1; VLFLsmoothboundary(A.VL,A.FL,0,0,0.5,pi/1.3); % Avoid closing straight lines % A=SG1; VLFLsmoothboundary(A.VL,A.FL,0,-10,0.5,pi/1.3); % Close up tom 10mm leg length % % See also: VLFLremoveIntersectFacets % % % Copyright 2018 Tim C. Lueth |
finddoubledrows(VL)- returns the indices of the lines with copies of a earlier row |
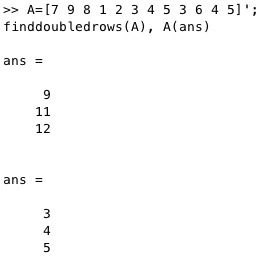 | % finddoubledrows(VL) - returns the indices of the lines with copies of a earlier row % (by Tim Lueth, VLFL-Lib, 2018-SEP-11 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.3 % % See also: flipvar % % c=finddoubledrows(VL) % === INPUT PARAMETERS === % VL: list of rows % === OUTPUT RESULTS ====== % c: indices of the second, third, and so on, occur to be removed % % EXAMPLE: % A=[7 9 8 1 2 3 4 5 3 6 4 5]'; % finddoubledrows(A), A(ans) % % A=[0 0; 1 0 ; 2 0; 4 0; 1 0]; % finddoubledrows(A), A(ans,:) % % See also: flipvar % % % Copyright 2018 Tim C. Lueth |
VLFLremoveIntersectFacets(VL,FL)- removes intersecting facets from a VLFL surface |
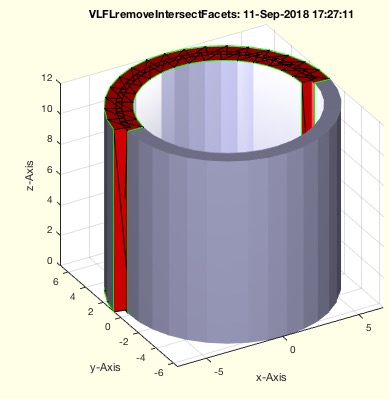 | % VLFLremoveIntersectFacets(VL,FL) - removes intersecting facets from a VLFL surface % (by Tim Lueth, VLFL-Lib, 2018-SEP-11 as class: SURFACES) % % Introduced first in SolidGeometry 4.3 % % See also: SGcheckmeshlab, SGintersectFacetPoints, % VLFLinsertFacetPoints, SGisInterior, VLofVLFLselfIntersection % % [NFL,remi,nii]=VLFLremoveIntersectFacets(VL,FL) % === INPUT PARAMETERS === % VL: Vertex list or SG % FL: Facet List % === OUTPUT RESULTS ====== % NFL: New Facet list % remi: index of removed facets relative to FL % nii: index of not intersecting facets relative to FL % % EXAMPLE: % A=SGreadSTL('/Volumes/LUETH-WIN/WIN AIM Matlab Libraries/STL Files for SG-Lib/Herzklappe Patient.STL') % VLFLremoveIntersectFacets(A.VL,A.FL); % % A=SGsample(36) % VLFLremoveIntersectFacets(A.VL,A.FL); % % See also: SGcheckmeshlab, SGintersectFacetPoints, % VLFLinsertFacetPoints, SGisInterior, VLofVLFLselfIntersection % % % Copyright 2018 Tim C. Lueth |
ezof3P(VL)- returns ez and R for 3 Point Rotation Matrix |
 | % ezof3P(VL) - returns ez and R for 3 Point Rotation Matrix % (by Tim Lueth, VLFL-Lib, 2018-SEP-04 as class: ANALYTICAL GEOMETRY) % % Same as T3P and Tof3P % x=p2-p1; ex=p2/norm(x); % z=cross(x,p3-p1); ez=z/norm(z); % y=cross(ez,ex); ey=y/norm(y); (Status of: 2018-09-05) % % Introduced first in SolidGeometry 4.3 % % See also: TofR, TofVL, TPL, TofDPhiH, T3ofT2, T3P, T2P, Tof3P % % [ez,R,T]=ezof3P(VL) % === INPUT PARAMETERS === % VL: Vertex List % === OUTPUT RESULTS ====== % ez: ez vector [x y z] % R: Rotation Matrix [ex ey ez] % T: Transformation matrix [ex ey ez p1] % % EXAMPLE: % ezof3P([0 0 0;10 0 0; 0 10 0]) % % See also: TofR, TofVL, TPL, TofDPhiH, T3ofT2, T3P, T2P, Tof3P % % % Copyright 2018-2021 Tim C. Lueth |
CVLofSGfreeboundary(SG)- returns the closed vertex list for all open surfaces |
 | % CVLofSGfreeboundary(SG) - returns the closed vertex list for all open surfaces % (by Tim Lueth, VLFL-Lib, 2018-SEP-04 as class: SURFACES) % % Same as CVLofopenfaces. This fnctn is more or less for testing % purposes. The fnctn VLFLcorrectdoubledvertex is called first, since % otherwise it makes no sense to detect open surfaces (Status of: % 2018-09-04) % % Introduced first in SolidGeometry 4.3 % % See also: CVLofopenfaces, SGcheckboundaryedges % % CVL=CVLofSGfreeboundary(SG) % === INPUT PARAMETERS === % SG: Solid Geometry % === OUTPUT RESULTS ====== % CVL: Closed Vertex List % % EXAMPLE: % loadweb JACO_robot.mat; A=SGseparate(JC2,2) % CVLofopenfaces(A.VL,A.FL); % % loadweb AAruffo_surf.mat % load some surface data sets % CVLofSGfreeboundary(SG1); % % % See also: CVLofopenfaces, SGcheckboundaryedges % % % Copyright 2018 Tim C. Lueth |
VLcheckboundaryaccuracy(VL,FL)- returns the sufficient number of digits for rounding to achieve minimal open boundaries |
 | % VLcheckboundaryaccuracy(VL,FL) - returns the sufficient number of digits for rounding to achieve minimal open boundaries % (by Tim Lueth, VLFL-Lib, 2018-SEP-01 as class: SURFACES) % % This fnctn VLcheckboundaryaccuracy tries to round the points of the % vertexlist (to press on a grid) in such a way that there are as few % free / open surface edges as possible. The older fnctn % VLcheckvertexaccuracy tries to guarantee the distance between vertices. % otab format: [rounding digits nr-of-edges nr-of-groups] (Status of: % 2018-09-01) % % Introduced first in SolidGeometry 4.3 % % See also: VLcheckvertexaccuracy, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices, SGcheckmeshlab, SGcheckVLaccuracy % % [otab,SGN]=VLcheckboundaryaccuracy(VL,FL) % === INPUT PARAMETERS === % VL: Original Vertex List or SG % FL: Original Facet List % === OUTPUT RESULTS ====== % otab: full table of significant vertex distances after rounding % SGN: corrected Solid Geometry % % EXAMPLE: loadweb JACO_robot.mat % VLcheckboundaryaccuracy(JC2); % VLcheckboundaryaccuracy(JACO); % otab=VLcheckboundaryaccuracy(JC2); JC2.VL=round(JC2.VL,otab(1,1)); % % % See also: VLcheckvertexaccuracy, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices, SGcheckmeshlab, SGcheckVLaccuracy % % % Copyright 2018 Tim C. Lueth |
VLcheckvertexaccuracy(VLorg)- returns the sufficient number of digits for rounding the vertex coordinates of a solid |
 | % VLcheckvertexaccuracy(VLorg) - returns the sufficient number of digits for rounding the vertex coordinates of a solid % (by Tim Lueth, VLFL-Lib, 2018-AUG-30 as class: SURFACES) % % This fnctn takes time since it works iterative manner. % Before using SGchecknonmanifoldedges, SGchecknonmanifoldvertices, % SGcheckmeshlab it makes sense to find out what the accuracy of the STL % generating process was. (Status of: 2018-09-01) % % Introduced first in SolidGeometry 4.3 % % See also: VLcheckboundaryaccuracy, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices, SGcheckmeshlab, SGcheckVLaccuracy % % atab=VLcheckvertexaccuracy(VLorg) % === INPUT PARAMETERS === % VLorg: Original Vertex List % === OUTPUT RESULTS ====== % atab: full table of significant vertex distances after rounding % % EXAMPLE: loadweb JACO_robot.mat % VLcheckvertexaccuracy(JC2); % VLcheckvertexaccuracy(JC2.VL); % atab=VLcheckvertexaccuracy(JC2.VL), JC2.VL=round(JC2.VL,atab(1,1)); % First Correction % atab=VLcheckvertexaccuracy(JC2.VL), JC2.VL=round(JC2.VL,atab(1,1)); % No further correction % % % See also: VLcheckboundaryaccuracy, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices, SGcheckmeshlab, SGcheckVLaccuracy % % % Copyright 2018 Tim C. Lueth |
SGshortopti(SG,otyp)- returns the vertex list with optimal number of loss less reduced vertices |
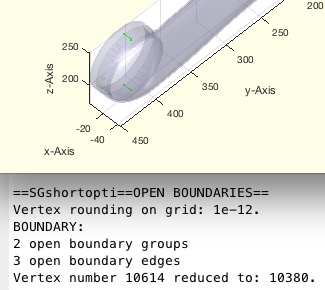 | % SGshortopti(SG,otyp) - returns the vertex list with optimal number of loss less reduced vertices % (by Tim Lueth, VLFL-Lib, 2018-AUG-30 as class: AUXILIARY PROCEDURES) % % Some CAD Systems creates STL files that have different vertex % coordinates for the same vertices because of inaccuracies. This fnctn % uses VLcheckvertexaccuracy to find the optimal grid for loss less % optimization % This fnctn should be used after the first readin of an exported STL % file. Afterwards it makes sense to check the file using SGcheckmeshlab % (Status of: 2018-09-01) % % Introduced first in SolidGeometry 4.3 % % See also: VLcheckvertexaccuracy, SGshort, VLcheckboundaryaccuracy, % SGcheckmeshlab % % SGN=SGshortopti(SG,[otyp]) % === INPUT PARAMETERS === % SG: Original SG % otyp: optimization type: 'vertex' or 'boundary' % === OUTPUT RESULTS ====== % SGN: SG.VL, SG.FL with optimal number of loss less reduced vertices % % EXAMPLE: % load JACO_robot.mat % SGshortopti(JC2) % SGshortopti(JC2,'vertex') % SGshortopti(JC2,'boundary') % % % See also: VLcheckvertexaccuracy, SGshort, VLcheckboundaryaccuracy, % SGcheckmeshlab % % % Copyright 2018 Tim C. Lueth |
SGrepairnonmanifoldvertices(SG)- returns a solid without non manfold vertices |
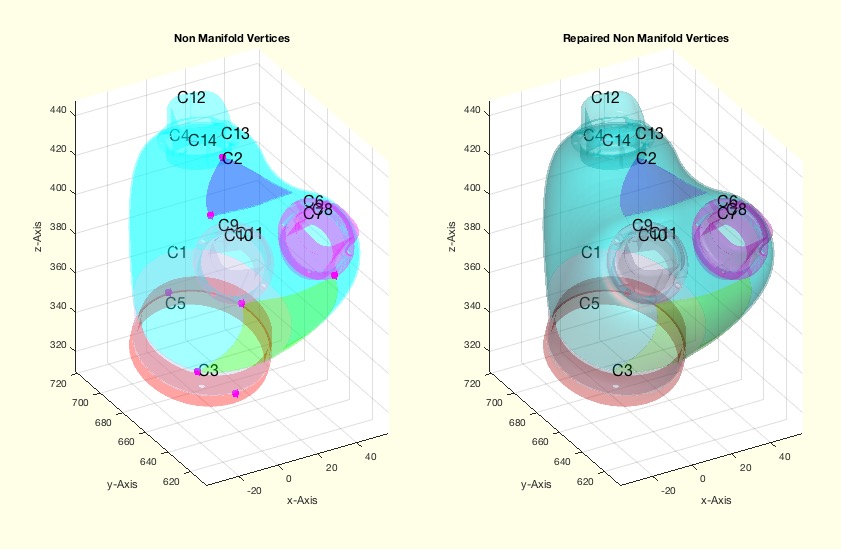 | % SGrepairnonmanifoldvertices(SG) - returns a solid without non manfold vertices % (by Tim Lueth, VLFL-Lib, 2018-AUG-30 as class: EXPERIMENTS) % % Non manifold vertices are vertices that are shared in separate surface % models. This can only exist if there are several separate surface % models in a VLFL structure. SGsurfaceplot/SGseparate would display % multiple surfaces. % Current method: For the vertices that have been used several times, the % respective surface normal vector is calculated separately in each % surface and the vertex is slightly shifted in the opposite direction. % This separates the surface when they have had a different orientation. % ATTENTION: Meshlab consideres points with a distance less than 1e-4 as % identical! % % There are different strategies to resolve the non manifold vertices. % a) Disconnect and insert a distance % b) Separate and slide the surfaces into each other % c) Separate and then selectively connect using additional points to % form a link or several common points, i.e. a link of length zero. % (Status of: 2018-09-05) % % Introduced first in SolidGeometry 4.3 % % See also: SGshortopti, exp_2018_08_25_nonmanedge, % exp_2018_08_25_nonmanvert % % SGc=SGrepairnonmanifoldvertices(SG) % === INPUT PARAMETERS === % SG: Solid Geometry % === OUTPUT RESULTS ====== % SGc: Resulting Geometries as cells % % EXAMPLE: % loadweb JACO_robot.mat; % SGrepairnonmanifoldvertices(JC3) % SGrepairnonmanifoldvertices(SGshortopti(JC3,'boundary')) % SGrepairnonmanifoldvertices(J63) % SGrepairnonmanifoldvertices(SGSample(37)) % % See also: SGshortopti, exp_2018_08_25_nonmanedge, % exp_2018_08_25_nonmanvert % % % Copyright 2018 Tim C. Lueth |
VLunidirect(VL,thr)- returns a unidirected vector ist |
 | % VLunidirect(VL,thr) - returns a unidirected vector ist % (by Tim Lueth, VLFL-Lib, 2018-AUG-26 as class: AUXILIARY PROCEDURES) % % Occasionally in a list of vectors only the direction of a vector is % important and not its sign. This fnctn removes the duplication of % vectors and always takes the first occurrence of this vector for % copies. (Status of: 2018-08-28) % % Introduced first in SolidGeometry 4.3 % % See also: VLnorm, VLdistance % % [NL,ri]=VLunidirect(VL,[thr]) % === INPUT PARAMETERS === % VL: Vector list % thr: number of relevant digits for round; default is 5 % === OUTPUT RESULTS ====== % NL: Reduced Vector list % ri: removal index list % % EXAMPLE: % VL=[1 0 0;-1 0 0; 0 1 0; 0 -1 0; 0 0 1; 0 0 -1;1 -1 0; -1 1 0.00001], % VLunidirect(VL,3) % VLunidirect(VL,5) % % See also: VLnorm, VLdistance % % % Copyright 2018 Tim C. Lueth |
exp_2018_08_25_nonmanedge (SG)- EXPERIMENT to repair non manifold vertices of TWO OR MORE Surfaces |
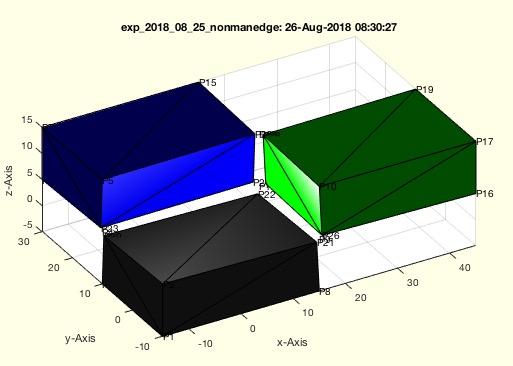 | % exp_2018_08_25_nonmanedge (SG) - EXPERIMENT to repair non manifold vertices of TWO OR MORE Surfaces % (by Tim Lueth, VLFL-Lib, 2018-AUG-25 as class: EXPERIMENTS) % % This fnctn does not handle the case of a self touching surface such as % SGsample(35) % % Non manifold edges are edges that are used by two surfaces % simultaneously, i.e. two two points are common to the connecting edge. % In contrast to non manifold vertices, the surfaces can no longer be % identified as separate surfaces. To solve the problem, the two points % and the edge must be duplicated. This raises the question of which of % the facets that connect to the edge belongs to one of the two bodies. % Only when this question has been clarified can the bodies be separated. % % Current method: First, all areas hanging on all non manifold edges are % determined. These surfaces fc are removed and the remaining surfaces of % the original body now disintegrate into different bodies. The surfaces % fc are now assigned to these separated bodies again. For the % calculation of the shift vector of the points of the edge only the % surfaces of fc are used, which are assigned to the respective body. % Each body thus receives different displacement vectors for the two % points. For each body and each point the sum of the shifts is % calculated again. Then a new point is created in the VL for each body % and point, which corresponds to a copy of the old point plus the % displacement vector. The list of points is only extended. The % superfluous points remain in the list. (Status of: 2018-08-27) % % Introduced first in SolidGeometry 4.3 % % See also: exp_2018_08_25_nonmanvert % % exp_2018_08_25_nonmanedge(SG) % === INPUT PARAMETERS === % SG: Solid Geometry % % EXAMPLE: % exp_2018_08_25_nonmanedge(SGsample(14)) % exp_2018_08_25_nonmanedge(SGsample(37)) % one non manifold vertex of two solids % exp_2018_08_25_nonmanedge(SGsample(38)) % one non manifold edges of two solids % exp_2018_08_25_nonmanedge(SGsample(39)) % two non manifold edges of three solids % exp_2018_08_25_nonmanedge(SGsample(40)) % two non manifold edges of three solids % % See also: exp_2018_08_25_nonmanvert % % % Copyright 2018 Tim C. Lueth |
exp_2018_08_25_nonmanvert(SG)- EXPERIMENT to repair non manifold vertices |
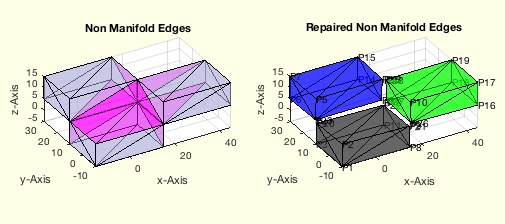 | % exp_2018_08_25_nonmanvert(SG) - EXPERIMENT to repair non manifold vertices % (by Tim Lueth, VLFL-Lib, 2018-AUG-25 as class: EXPERIMENTS) % % Non manifold vertices are vertices that are shared in separate surface % models. This can only exist if there are several separate surface % models in a VLFL structure. SGsurfaceplot/SGseparate would display % multiple surfaces. % Current method: For the vertices that have been used several times, the % respective surface normal vector is calculated separately in each % surface and the vertex is slightly shifted in the opposite direction. % This separates the surface when they have had a different orientation. % ATTENTION: Meshlab consideres points with a distance less than 1e-4 as % identical! % % There are different strategies to resolve the non manifold vertices. % a) Disconnect and insert a distance % b) Separate and slide the surfaces into each other % c) Separate and then selectively connect using additional points to % form a link or several common points, i.e. a link of length zero. % (Status of: 2018-08-27) % % Introduced first in SolidGeometry 4.3 % % See also: exp_2018_08_25_nonmanedge % % SGc=exp_2018_08_25_nonmanvert(SG) % === INPUT PARAMETERS === % SG: Solid Geometry % === OUTPUT RESULTS ====== % SGc: Resulting Geometries as cells % % EXAMPLE: % loadweb JACO_robot.mat; % exp_2018_08_25_nonmanvert(JC3) % exp_2018_08_25_nonmanvert(JC6) % exp_2018_08_25_nonmanvert(SGsample(37)) % % See also: exp_2018_08_25_nonmanedge % % % Copyright 2018 Tim C. Lueth |
VLofVLFLselfIntersection(VL,FL,sep,thr)- returns the self intersection crossing points of a Surface |
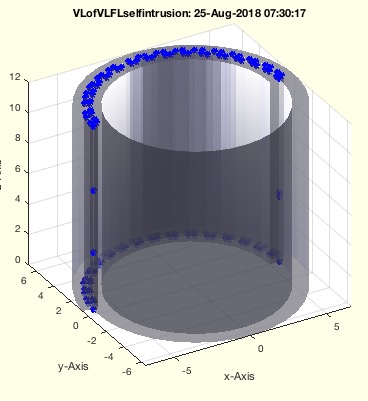 | % VLofVLFLselfIntersection(VL,FL,sep,thr) - returns the self intersection crossing points of a Surface % (by Tim Lueth, VLFL-Lib, 2018-AUG-25 as class: SURFACES) % % Only original facet points are not returned % Fnctn could be improved by returning the crossing facets (Status of: % 2018-09-11) % % Introduced first in SolidGeometry 4.3 % % See also: VLFLcheckmeshlab, SGintersectFacetPoints, % VLFLinsertFacetPoints, SGisInterior, VLFLremoveIntersectFacets, % VLFLcheckselfintersection % % [CVL,SG,CVLi,CFi]=VLofVLFLselfIntersection(VL,FL,[sep,thr]) % === INPUT PARAMETERS === % VL: Vertex list % FL: Facet list % sep: surface separation {true,false}; default is false; % thr: rounding threshold default is 1e-7 % === OUTPUT RESULTS ====== % CVL: Faces collision points % SG: Cell list of Separated Geometry Surfaces % CVLi: Cell list of faces collision points % CFi: % % EXAMPLE: % SG=SGsample(15); VLofVLFLselfIntersection (SG.VL,SG.FL); % SG=SGsample(36); VLofVLFLselfIntersection(SG.VL,SG.FL); % SG=SGsample(17); VLofVLFLselfIntersection(SG.VL,SG.FL,true); % SG=SGsample(17); VLofVLFLselfIntersection(SG.VL,SG.FL,false); % % See also: VLFLcheckmeshlab, SGintersectFacetPoints, % VLFLinsertFacetPoints, SGisInterior, VLFLremoveIntersectFacets, % VLFLcheckselfintersection % % % Copyright 2018 Tim C. Lueth |
SGcheckmeshlab(SG,inters)- performs the most important checks for STL files |
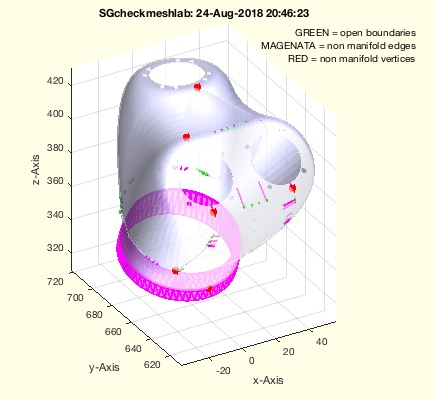 | % SGcheckmeshlab(SG,inters) - performs the most important checks for STL files % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn should return the same results as the output of Meshlab from % http://vcg.isti.cnr.it % % Does not currently find identical faces that overlap with opposite % normal vectors (Status of: 2020-01-10) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, VLFLcheckboundaryedges, VLFLcheckmeshlab, % SGchecknonmanifoldedges, SGchecknonmanifoldvertices, % SGcheckboundaryedges % % res=SGcheckmeshlab([SG,inters]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % inters: % === OUTPUT RESULTS ====== % res: [nonmanifold-Edges nonmanifold-faces openboundary-Edges % openboundary-Groups] % % EXAMPLE: % SG=SGsample(14); SGcheckmeshlab(SG) % SG=SGsample(35); SGcheckmeshlab(SG) % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, VLFLcheckboundaryedges, VLFLcheckmeshlab, % SGchecknonmanifoldedges, SGchecknonmanifoldvertices, % SGcheckboundaryedges % % % Copyright 2018-2022 Tim C. Lueth |
VLFLcheckmeshlab(VL,FL,vcor,intl)- performs the most important checks for STL files |
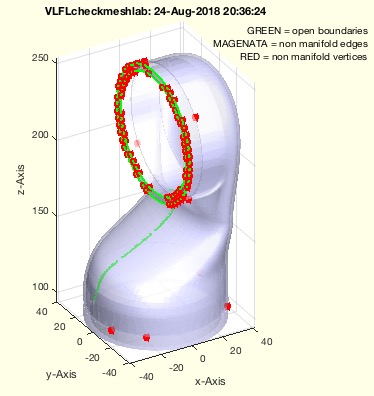 | % VLFLcheckmeshlab(VL,FL,vcor,intl) - performs the most important checks for STL files % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn should return the same results as the output of Meshlab from % http://vcg.isti.cnr.it (Status of: 2020-01-10) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, VLFLcheckboundaryedges, % SGchecknonmanifoldedges, SGchecknonmanifoldvertices, % SGcheckboundaryedges, SGcheckmeshlab % % res=VLFLcheckmeshlab(VL,FL,[vcor,intl]) % === INPUT PARAMETERS === % VL: Vertex list % FL: Facet list % vcor: map to grid; default is false % intl: number of maximum facets for self intersection tests; default is % 3000 % === OUTPUT RESULTS ====== % res: [nonmanifold-Edges nonmanifold-faces openboundary-Edges % openboundary-Groups] % % EXAMPLE: % SG=SGsample(14); VLFLcheckmeshlab(SG.VL,SG.FL) % SG=SGsample(35); VLFLcheckmeshlab(SG.VL,SG.FL) % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, VLFLcheckboundaryedges, % SGchecknonmanifoldedges, SGchecknonmanifoldvertices, % SGcheckboundaryedges, SGcheckmeshlab % % % Copyright 2018-2020 Tim C. Lueth |
SGcheckboundaryedges(SG)- returns the open boundaries of the surface |
 | % SGcheckboundaryedges(SG) - returns the open boundaries of the surface % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn should return the same results as the output of Meshlab from % http://vcg.isti.cnr.it % more or less the same as VLFLfreeboundaryfacets % (Status of: 2018-08-26) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, VLFLcheckboundaryedges, VLFLcheckmeshlab, % SGchecknonmanifoldedges, SGchecknonmanifoldvertices, SGcheckmeshlab % % [EL,CEL,fi,VL,FL]=SGcheckboundaryedges(SG) % === INPUT PARAMETERS === % SG: Solid Geoemtry % === OUTPUT RESULTS ====== % EL: Edge list of open boundaries % CEL: CEL edge list to group EL segments % fi: facet index list of the facets % VL: Vertex list of SG % FL: Facet list of SG % % EXAMPLE: % loadweb JACO_robot.mat; % SG=SGshort(JC3,1e-7); SGcheckboundaryedges(SG); % testfunctTL('SG=SGshort(JC61,#1); SGcheckboundaryedges(SG);',power(1/10,2:15)) % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, VLFLcheckboundaryedges, VLFLcheckmeshlab, % SGchecknonmanifoldedges, SGchecknonmanifoldvertices, SGcheckmeshlab % % % Copyright 2018 Tim C. Lueth |
VLFLcheckboundaryedges(VL,FL)- returns the open boundaries of the surface |
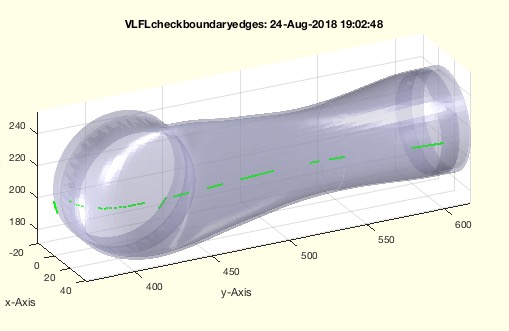 | % VLFLcheckboundaryedges(VL,FL) - returns the open boundaries of the surface % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn should return the same results as the output of Meshlab from % http://vcg.isti.cnr.it % more or less the same as VLFLfreeboundaryfacets % (Status of: 2018-08-26) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices % % [EL,CEL,fi]=VLFLcheckboundaryedges(VL,FL) % === INPUT PARAMETERS === % VL: Vertex List % FL: Facet List % === OUTPUT RESULTS ====== % EL: Edge list of open boundaries % CEL: CEL edge list to group EL segments % fi: facet index list of the facets % % EXAMPLE: % loadweb JACO_robot.mat; % SG=SGshort(JC3,1e-7); VLFLcheckboundaryedges(SG.VL,SG.FL); % testfunctTL('SG=SGshort(JC3,#1); VLFLcheckboundaryedges(SG.VL,SG.FL);',power(1/10,3:15)) % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices % % % Copyright 2018 Tim C. Lueth |
SGchecknonmanifoldvertices(SG)- returns the non manifold vertices, i.e. identical points used in separated surfaces |
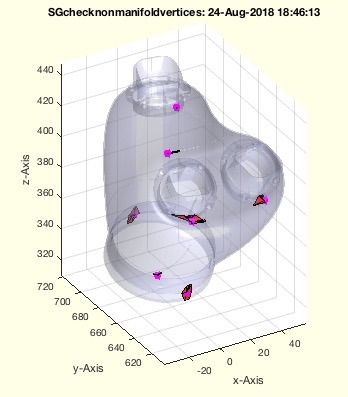 | % SGchecknonmanifoldvertices(SG) - returns the non manifold vertices, i.e. identical points used in separated surfaces % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn should return the same results as the output of Meshlab from % http://vcg.isti.cnr.it % (Status of: 2018-08-24) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, SGchecknonmanifoldedges % % [vvi,fi,VL,FL]=SGchecknonmanifoldvertices(SG) % === INPUT PARAMETERS === % SG: Solid Geoemtry % === OUTPUT RESULTS ====== % vvi: Index list of non manifold vertices / multiple used vertices % fi: index list of faces attached to non manifold vertices % VL: Vertex list of SG % FL: Facet list of SG % % EXAMPLE: % loadweb JACO_robot.mat; % SG=JC3; SGchecknonmanifoldvertices(SG); % % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, SGchecknonmanifoldedges % % % Copyright 2018 Tim C. Lueth |
SGchecknonmanifoldedges(SG)- returns the edges and facets with non manifold edges |
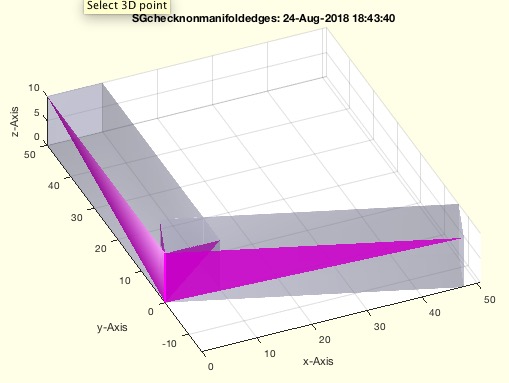 | % SGchecknonmanifoldedges(SG) - returns the edges and facets with non manifold edges % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn should return the same results as the output of Meshlab from % http://vcg.isti.cnr.it % (Status of: 2018-08-24) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, SGchecknonmanifoldvertices % % [NMEL,FLi,VL,FL]=SGchecknonmanifoldedges(SG) % === INPUT PARAMETERS === % SG: Solid Geoemtry % === OUTPUT RESULTS ====== % NMEL: Edge list of non manifold eges % FLi: facet index list of problematic facets % VL: Vertex list of SG % FL: Facet List of SG % % EXAMPLE: % SG=SGsample(14); SGchecknonmanifoldedges(SG) % SG=SGsample(35); SGchecknonmanifoldedges(SG) % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, SGchecknonmanifoldvertices % % % Copyright 2018 Tim C. Lueth |
SGmeshlab (SG,colored,RBchange)- opens a solid geoemtry in an STL viewer |
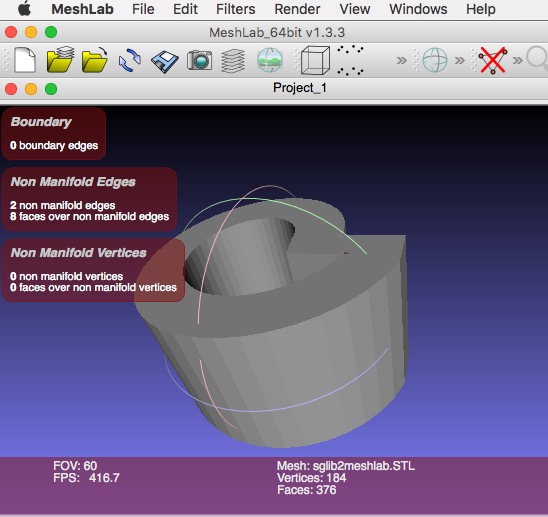 | % SGmeshlab (SG,colored,RBchange) - opens a solid geoemtry in an STL viewer % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn is used to compare checking results of the SG toolbox with % the results of the meshalb STL viewer % SG-Lib 4.7: The Facet colors for Red and Blue are switched because of a % Meshlab Bug wrt. to the Materialize Standard (Status of: 2019-06-29) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices % % SGmeshlab(SG,[colored,RBchange]) % === INPUT PARAMETERS === % SG: Solid Geometry % colored: if true; A.FC=A.FC(:,[3 2 1]); ; default is true % RBchange: % % EXAMPLE: % SG=SGsample(35); SGmeshlab(SG); VLFLchecknonmanifoldedges(SG.VL,SG.FL); % % See also: SGchecker, VLFLchecknonmanifoldedges, % VLFLchecknonmanifoldvertices, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices % % % Copyright 2018-2020 Tim C. Lueth |
VLFLchecknonmanifoldvertices(VL,FL);- returns the non manifold vertices, i.e. identical points used in separated surfaces |
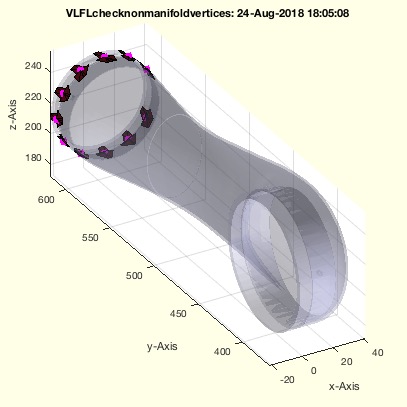 | % VLFLchecknonmanifoldvertices(VL,FL); - returns the non manifold vertices, i.e. identical points used in separated surfaces % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn should return the same results as the output of Meshlab from % http://vcg.isti.cnr.it % (Status of: 2018-08-24) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldedges % % [vvi,fi]=VLFLchecknonmanifoldvertices(VL,FL); % === INPUT PARAMETERS === % VL: Vertex list % FL: Facet list % === OUTPUT RESULTS ====== % vvi: Index list of non manifold vertices / multiple used vertices % fi: index list of faces attached to non manifold vertices % % EXAMPLE: % loadweb JACO_robot.mat; % SG=JC3; VLFLchecknonmanifoldvertices(SG.VL,SG.FL); % % % See also: SGchecker, VLFLchecknonmanifoldedges % % % Copyright 2018 Tim C. Lueth |
VLFLchecknonmanifoldedges(VL,FL);- returns the edges and facets with non manifold edges |
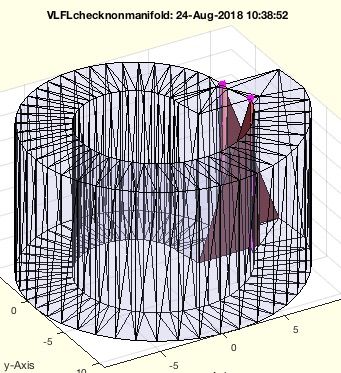 | % VLFLchecknonmanifoldedges(VL,FL); - returns the edges and facets with non manifold edges % (by Tim Lueth, VLFL-Lib, 2018-AUG-24 as class: AUXILIARY PROCEDURES) % % This fnctn should return the same results as the output of Meshlab from % http://vcg.isti.cnr.it (Status of: 2018-08-24) % % Introduced first in SolidGeometry 4.3 % % See also: SGchecker, VLFLchecknonmanifoldvertices % % [NMEL,FLi]=VLFLchecknonmanifoldedges(VL,FL); % === INPUT PARAMETERS === % VL: Vertex list % FL: Facet list % === OUTPUT RESULTS ====== % NMEL: Edge list of non manifold eges % FLi: facet index list of problematic facets % % EXAMPLE: % SG=SGsample(14); VLFLchecknonmanifoldedges(SG.VL,SG.FL) % SG=SGsample(35); VLFLchecknonmanifoldedges(SG.VL,SG.FL) % % See also: SGchecker, VLFLchecknonmanifoldvertices % % % Copyright 2018 Tim C. Lueth |
