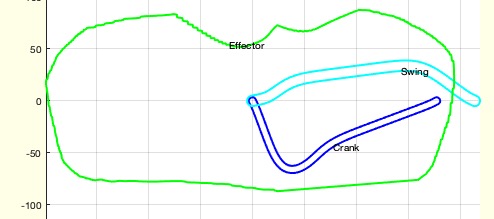
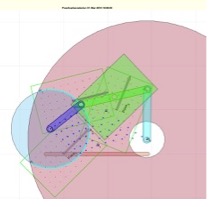
Posefourbarcheck(PS,aps,lim,CPLB,CPLE,CPLR,CPL1);- shows the shape of effector, crank and swing |
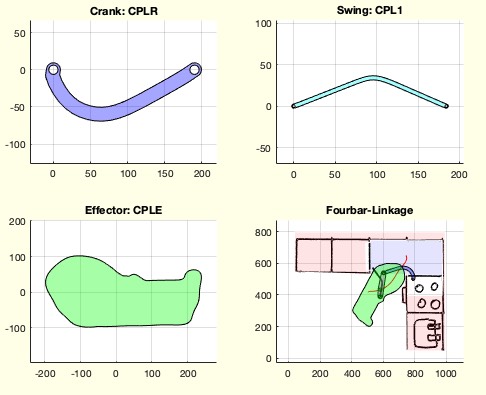 | % Posefourbarcheck(PS,aps,lim,CPLB,CPLE,CPLR,CPL1); - shows the shape of effector, crank and swing % (by Tim Lueth, VLFL-Lib, 2019-APR-22 as class: KINEMATICS AND FRAMES) % % In contrast to Posefourbaranimate, this fnctn uses the sjapes of % effector, swing and crank during animation (Status of: 2019-08-11) % % Introduced first in SolidGeometry 4.5 % % See also: Posefourbaranimate, Posefourbarshaping % % Posefourbarcheck(PS,[aps,lim,CPLB,CPLE,CPLR,CPL1]); % === INPUT PARAMETERS === % PS: Pose % aps: solution to check % lim: if true; limit the movement to the pose order % CPLB: Optional Background Shape % CPLE: Optional Effector Shape % CPLR: Optional Crank Shape % CPL1: Optional Swing Shape % % EXAMPLE: % PS=PosereadAPD('basecabinet_new') % PosereadAPD('/Volumes/LUETH-WIN/MATLAB_files_for_experiments/basecabinet_new.APD'); PS=ans; % PS=checkfourbar3Poseattachpermutation(PS,'',20) % n=546 % PS.CPLE=Posefourbarshaping(PS,[n,123],PLsquare(500,400),'E'); % PS.CPLR=Posefourbarshaping(PS,[n,123],PLsquare(500,400),'C'); % PS.CPL1=Posefourbarshaping(PS,[n,123],PLsquare(500,400),'S'); % Posefourbarcheck(PS,n) % % See also: Posefourbaranimate, Posefourbarshaping % % % Copyright 2019 Tim C. Lueth |
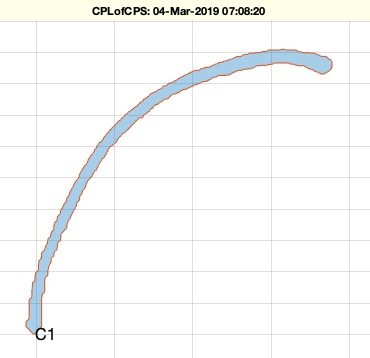
CPLlinkofPL(PL,s)- returns a convex hull including budder for a list of points |
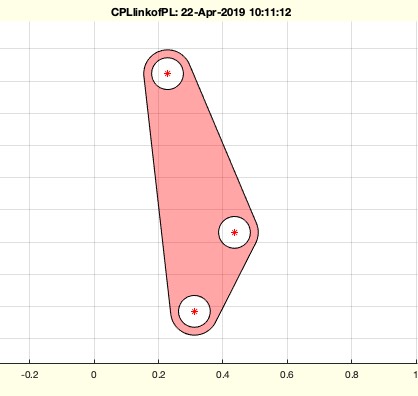 | % CPLlinkofPL(PL,s) - returns a convex hull including budder for a list of points % (by Tim Lueth, VLFL-Lib, 2019-APR-22 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: PLcircleoval, CPLremstraightAmin, CPLofPLgrow, CPLbuffer % % CPL=CPLlinkofPL(PL,[s]) % === INPUT PARAMETERS === % PL: Point list % s: outer radius and inner radius [ro ri]; or default values % === OUTPUT RESULTS ====== % CPL: Closed contour % % EXAMPLE: % CPLlinkofPL(rand(3,2)) % CPLlinkofPL(rand(3,2),0.05) % CPLlinkofPL(rand(3,2),[0.05 0.04]) % CPLlinkofPL(rand(3,2),[0.05 0.01]) % % See also: PLcircleoval, CPLremstraightAmin, CPLofPLgrow, CPLbuffer % % % Copyright 2019 Tim C. Lueth |
TofPoseattachmentpoints(P1,A1,B1)- returns the HT matrices from A1 to Pose and B1 to Pose |
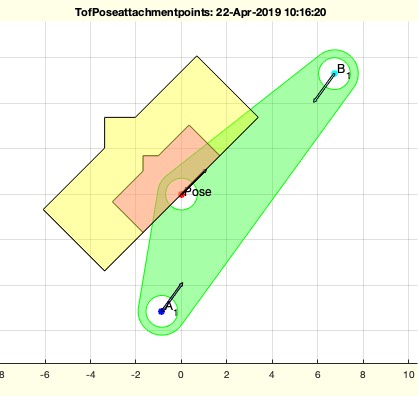 | % TofPoseattachmentpoints(P1,A1,B1) - returns the HT matrices from A1 to Pose and B1 to Pose % (by Tim Lueth, VLFL-Lib, 2019-APR-22 as class: KINEMATICS AND FRAMES) % % quite often it is necessary to transform the effector shape which is % relative defined to the pose into the coordinate system of the crank A1 % or the Swing B1. This fnctn returns both % TofPose - Frame of A1 from Point A1 and B1 % TofPoseGPL - Frames of A1 and B1 from Pose and GPL % TofA1B1GPL - Frame of Pose from A1 and B1 and GPL % TofPoseattachmentpoints - Frames of B1 and A1 from Pose qnd Points A1 % and B1 % (Status of: 2021-12-10) % % Introduced first in SolidGeometry 4.5 % % See also: TofPose, CPLofPosefourbarshape % % [TBP,TAP,TA1,TB1]=TofPoseattachmentpoints(P1,A1,B1) % === INPUT PARAMETERS === % P1: Absolute Pose coordinates or complete pose consisting of PS.A, % PS.B, PS.A1, PS.B1 % A1: absolute coordinates of A1 when P1 is reached % B1: absolute coordinates of B1 when P1 is reached % === OUTPUT RESULTS ====== % TBP: TAP=TA1\T0; to transform Pose origin coordinates into absolute % Coordinate v TB1*TBP % TAP: TBP=TB1\T0; to transform Pose origin coordinates into absolute % Coordinate v TA1*TAP % TA1: TA1=TofPose(A1,B1); % Simple frame in A1 with direction to B1 % TB1: TB1=TofPose(B1,A1); % Simple frame in B1 with direction to A1 % % EXAMPLE: % Posesample(7); PS=ans; % checkfourbar3Poseattachpermutation(PS,3,10); PS=ans; % PosefourbarselectAP(PS,1); PS=ans; % TofPoseattachmentpoints(PS); TAP=ans % [~,~,~,~,~,TA1,TB1]=PLofPosecouplercurve(PS,1); TA1=TA1(:,:,50), TB1=TB1(:,:,50) % cla; Posefourbarplot(PS,1) % PLofPosecouplercurve(PS) % CPLplot(PLtransT(PLarrow(5),TA1*TAP),'m-',2) % CPL=CPLlinkofPL([0 0;norm(TA1(1:2,3)-TB1(1:2,3))' 0;TAP(1:2,3)']); CPSplot(PLtrans(CPL,TA1),'m'); % % See also: TofPose, CPLofPosefourbarshape % % % Copyright 2019-2021 Tim C. Lueth |
Posefourbarshaping(PS,aps,SCPL,rel,XCPLW,XCPLA,XCPLC,XCPLS)- returns collision free path shaped contour for a specific fourbar linkage |
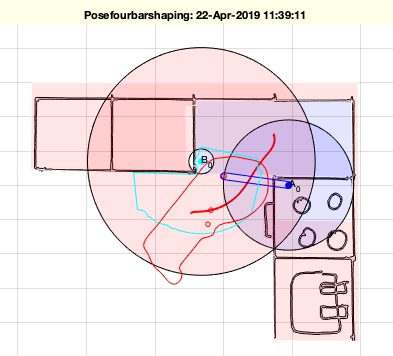 | % Posefourbarshaping(PS,aps,SCPL,rel,XCPLW,XCPLA,XCPLC,XCPLS) - returns collision free path shaped contour for a specific fourbar linkage % (by Tim Lueth, VLFL-Lib, 2019-APR-20 as class: MECHANICAL PROCEDURES) % % ======================================================================= % OBSOLETE (2019-06-03) - USE 'CPLofPosefourbarshaping' INSTEAD % ======================================================================= % % Introduced first in SolidGeometry 4.5 % % See also: [ CPLofPosefourbarshaping ] ; exp_2019_04_16_Shape, % exp_2019_03_28_Shape, exp_2018_12_20_cuttingshape % % CPL=Posefourbarshaping(PS,[aps,SCPL,rel,XCPLW,XCPLA,XCPLC,XCPLS]) % === INPUT PARAMETERS === % PS: Pose and fourbar linkage struct including GPL and GAL % aps: [solution, limiting order] % SCPL: Contour to shape % rel: CPL is moved relative to 'P'ose, 'C'rank, or 'Swing' % XCPLW: Static obstacles in the environment % XCPLA: Obstacle contours attached to Pose % XCPLC: Obstacle contour moved with crank % XCPLS: Obstacle contour moved with swing % === OUTPUT RESULTS ====== % CPL: Collision free contour % % EXAMPLE: % PS.CPL1=Posefourbarshaping(PS,[-546,123],PLsquare(200,200),'S'); % % See also: [ CPLofPosefourbarshaping ] ; exp_2019_04_16_Shape, % exp_2019_03_28_Shape, exp_2018_12_20_cuttingshape % % % Copyright 2019 Tim C. Lueth |
PLconnectopenradial(PL,R);- closes an open line by a contour |
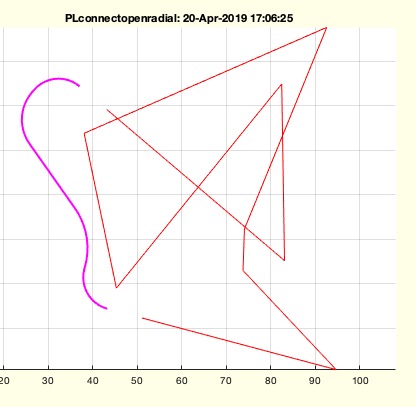 | % PLconnectopenradial(PL,R); - closes an open line by a contour % (by Tim Lueth, VLFL-Lib, 2019-APR-20 as class: CLOSED POLYGON LISTS) % % Uses: % VLradialEdges % % (Status of: 2019-04-20) % % Introduced first in SolidGeometry 4.5 % % See also: PLtangentarc4P, PLcloseopenends % % PLconnectopenradial(PL,[R]); % === INPUT PARAMETERS === % PL: single open line % R: % % EXAMPLE: % PLconnectopenradial(rand(10,2)*100); % PLconnectopenradial(rand(10,2)*100); CPL=ans; SGfigure; CPLplot(CPL,'m-'); % % See also: PLtangentarc4P, PLcloseopenends % % % Copyright 2019 Tim C. Lueth |
PLfft(PL,)- same as CPLfft but for open contours |
 | % PLfft(PL,) - same as CPLfft but for open contours % (by Tim Lueth, VLFL-Lib, 2019-APR-20 as class: CLOSED POLYGON LISTS) % % Uses PLconnectopenends before using CPLfft (Status of: 2019-04-20) % % Introduced first in SolidGeometry 4.5 % % See also: CPLfft, PLconnectopenends, VLBezierC % % PLN=PLfft(PL,[]) % === INPUT PARAMETERS === % PL: Open Point List % === OUTPUT RESULTS ====== % PLN: Frequency limited Contour % % EXAMPLE: % PLfft(PLsample(4),10) % % See also: CPLfft, PLconnectopenends, VLBezierC % % % Copyright 2019 Tim C. Lueth |
PLconnectopenends(PL,)- closes an open line by a contour |
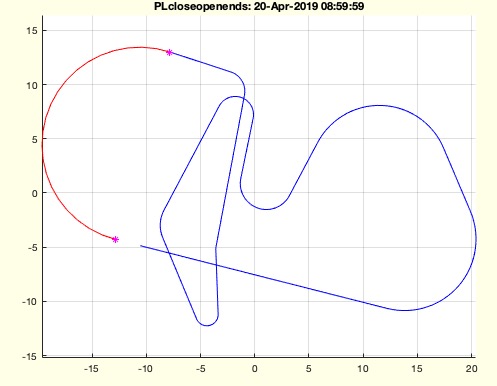 | % PLconnectopenends(PL,) - closes an open line by a contour % (by Tim Lueth, VLFL-Lib, 2019-APR-20 as class: CLOSED POLYGON LISTS) % % Uses: % PLtangentarc4P % (Status of: 2019-04-20) % % Introduced first in SolidGeometry 4.5 % % See also: PLtangentarc4P, PLcloseopenends % % [CPL,PLE]=PLconnectopenends(PL,[]) % === INPUT PARAMETERS === % PL: single open line % === OUTPUT RESULTS ====== % CPL: Closed contour without doubled entries % PLE: Externsion may contain start or end point % % EXAMPLE: % PLX=PLradialEdges(PLrand(10,4)*10,30); SGfigure; PLplot(PLX,'b-'); % Arbitrary Line % PLcloseopenends(PLX) % CPLfft(PLcloseopenends(PLsample(3)),4) % % See also: PLtangentarc4P, PLcloseopenends % % % Copyright 2019 Tim C. Lueth |
PLtangentarc4P(PLA,PLB)- returns center point and circle segment for the two tangents |
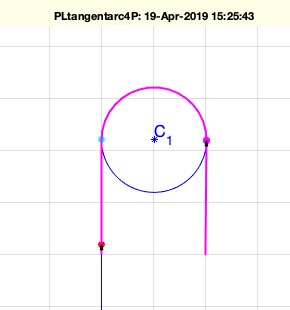 | % PLtangentarc4P(PLA,PLB) - returns center point and circle segment for the two tangents % (by Tim Lueth, VLFL-Lib, 2019-APR-19 as class: ANALYTICAL GEOMETRY) % % This fnctn connects the endpoints of two point lists via a circle. The % circle is selected so that the last two points of the two point lists % are regarded as tangents of the circle. The contour always runs from % the end points of the first list to the end points of the second list. % To connect the two point lists, the last 4 points of both must be % replaced by the new point list and the sequence of the second point % list rotated. % % All circles (!) for which the two straight lines form the tangents lie % on the halving of the angle between the two straight lines. The two % possible radii are determined by the respective perpendicular to the % lines through the respective end point. The larger of the two radii can % be used for both lines by extending the other line. For the smaller of % the two radii, the other would have to be shortened. % (Status of: 2019-04-19) % % Introduced first in SolidGeometry 4.5 % % See also: crosscircline, rofcircbend, circof2tangent, PLtangentcirc, % PLtangentcirc3, tangent2circ, cross2circ % % [PLall,PLX,R]=PLtangentarc4P(PLA,PLB) % === INPUT PARAMETERS === % PLA: Start Point and Endpoint of Line A [xs ys; xe ye] % PLB: Start Point and Endpoint of Line B [xs ys; xe ye] % === OUTPUT RESULTS ====== % PLall: Radius of the 4 circles (1st is left of PLA(2,:) % PLX: center points of the 4 circles (1st is left of PLA(2,:) % R: cross points of B of 4 circles (1st is left of PLA(2,:) % % EXAMPLE: % PLX=PLradialEdges(PLrand(10,4)*100,30); SGfigure; PLplot(PLX,'b-'); % SGfigure; PLplot(PLX,'b-'); PLY=PLtangentarc4P(PLX,flipud(PLX(1:2,:))); PLplot(PLY,'m-',2) % PLX=rand(4,2)*10; PLtangentarc4P(PLX(1:2,:),PLX(3:4,:)); fullview(1500) % ANY CASE % % % See also: crosscircline, rofcircbend, circof2tangent, PLtangentcirc, % PLtangentcirc3, tangent2circ, cross2circ % % % Copyright 2019 Tim C. Lueth |
PLcirclearc(cp,A,B,)- returns an circle arc between two circle points in right hand rule |
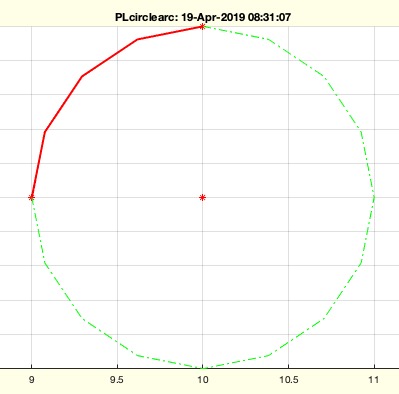 | % PLcirclearc(cp,A,B,) - returns an circle arc between two circle points in right hand rule % (by Tim Lueth, VLFL-Lib, 2019-APR-19 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 4.5 % % See also: PLcircle, PLcircleoval, PLcircleseg % % [PLR,PLL]=PLcirclearc(cp,A,B,[]) % === INPUT PARAMETERS === % cp: center point or R (+/-) alternatviely % A: point A or angle w1 % B: point B or angle w2 % === OUTPUT RESULTS ====== % PLR: Right hand arc starting at A (red) % PLL: Left hand arc starting at B (green) % % EXAMPLE: % PLcirclearc([10 10],[10 11],[9 10]) % % [PLX,PLY]=PLcirclearc(10,[10 0],[0 0]); cla; PLplot(PLX); shg % [PLX,PLY]=PLcirclearc(-10,[10 0],[0 0]); shg; PLplot(PLY,'g-'); shg % % See also: PLcircle, PLcircleoval, PLcircleseg % % % Copyright 2019 Tim C. Lueth |
CPLfindsmalldist(CPL,z)- returns areas of a CPL that have a small wall distance to the opposite contour |
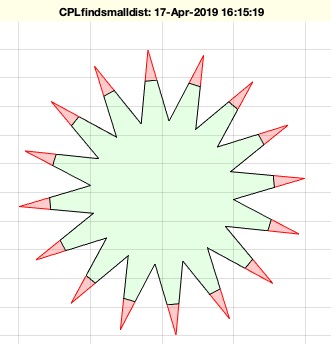 | % CPLfindsmalldist(CPL,z) - returns areas of a CPL that have a small wall distance to the opposite contour % (by Tim Lueth & Andreas Schroeffer, VLFL-Lib, 2019-APR-17 as class: % CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: CPLbuffer % % [CPLF,CPLX]=CPLfindsmalldist(CPL,[z]) % === INPUT PARAMETERS === % CPL: Closed Contour % z: minimalcontour thickness; default is 0.5mm % === OUTPUT RESULTS ====== % CPLF: Lost Contours; if empty, the contour has no problems % CPLX: Remaining Contour; % % EXAMPLE: % CPLfindsmalldist(PLstar(10,'','','','',.5),2); % CPLfindsmalldist(PLstar(10,'','','','',.5),1); % CPLfindsmalldist(PLgearDIN(.1,80)); % % % See also: CPLbuffer % % % Copyright 2019-2020 Tim C. Lueth |
Posefourbarangles(PS,aps)- returns the angle position of the crank for the poses used in the fourbar linkage |
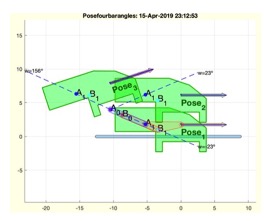 | % Posefourbarangles(PS,aps) - returns the angle position of the crank for the poses used in the fourbar linkage % (by Tim Lueth, VLFL-Lib, 2019-APR-15 as class: KINEMATICS AND FRAMES) % % written in in Carvoeiro, Portugal % (Status of: 2019-04-24) % % Introduced first in SolidGeometry 4.5 % % See also: Posefourbarinvkin, Posefourbartorquetrans, % Posefourbaranglelimit, Posefourbarposelimit % % [wcr,A1i,err]=Posefourbarangles(PS,[aps]) % === INPUT PARAMETERS === % PS: Pose using A0,A1,B0,B1 or PS.GAL & PS.GPL if aps ~= []; % aps: specific solution of PS.GAL to replace A0,A1,B0,B1 % === OUTPUT RESULTS ====== % wcr: list of crank angles for the pose list PS.A % A1i: list of endpoints Ai for the Poses % err: error in distance % % EXAMPLE: % PS=PosereadAPD('gripper') % PS=checkfourbar3Poseattachpermutation(PS,'',15); % Posefourbarangles(PS,140) % % See also: Posefourbarinvkin, Posefourbartorquetrans, % Posefourbaranglelimit, Posefourbarposelimit % % % Copyright 2019 Tim C. Lueth |
Posefourbartorquetrans(PS,aps,nw,Ti)- returns the torque transmission factor for crank to swing and crank to pose |
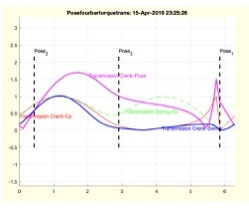 | % Posefourbartorquetrans(PS,aps,nw,Ti) - returns the torque transmission factor for crank to swing and crank to pose % (by Tim Lueth, VLFL-Lib, 2019-APR-14 as class: KINEMATICS AND FRAMES) % % written in in Carvoeiro, Portugal % The transmission Pose to Crank is still missing but important if the % force is applied at the pose location (Status of: 2019-04-14) % % Introduced first in SolidGeometry 4.5 % % See also: Posefourbarposelimit, Posefourbaranimate % % [tcp,tcs,wcr]=Posefourbartorquetrans(PS,[aps,nw,Ti]) % === INPUT PARAMETERS === % PS: Pose % aps: selected solution % nw: number of auxiliary point % Ti: optional point relative to pose; not implemented yet % === OUTPUT RESULTS ====== % tcp: transmission crank pose % tcs: transmission crank swing % wcr: crank angles % % EXAMPLE: % PosereadAPD('/Volumes/LUETH-WIN/MATLAB_files_for_experiments/basecabinet_new.APD'); PS=ans; % PS=Posefourbarposelimit(PS); % Posefourbartorquetrans(PS,50); fullview(500); % % See also: Posefourbarposelimit, Posefourbaranimate % % % Copyright 2019 Tim C. Lueth |
Tplotangle (T,wcr)- plot for a list of HT matrices the angle, angle velocity and angle acceleration |
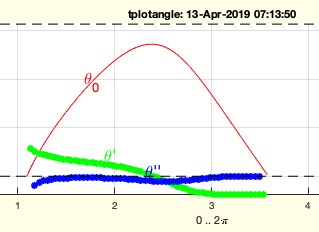 | % Tplotangle (T,wcr) - plot for a list of HT matrices the angle, angle velocity and angle acceleration % (by Tim Lueth, VLFL-Lib, 2019-APR-11 as class: KINEMATICS AND FRAMES) % % returns currently no handle % theta is the explicit rotation angle of the R matix relative to start % frame (Status of: 2019-04-11) % % Introduced first in SolidGeometry 4.5 % % See also: tplot, tplotangle % % Tplotangle(T,[wcr]) % === INPUT PARAMETERS === % T: Transformation matrix list % wcr: optional angle interval % % EXAMPLE: % PosereadAPD('/Volumes/LUETH-WIN/MATLAB_files_for_experiments/basecabinet_new.APD'); PS=ans; % aps=200; [PL,T0,wcr,TA0,TB0,TA1,TB1]=PLofPosecouplercurve(PS,aps,60); % % % % See also: tplot, tplotangle % % % Copyright 2019 Tim C. Lueth |
PLgearDIN(m,z,tig,n)- returns a gear contour wrt DIN from 3 to 48 teeth (replaces PLgear of year 2012) |
 | % PLgearDIN(m,z,tig,n) - returns a gear contour wrt DIN from 3 to 48 teeth (replaces PLgear of year 2012) % (by Tim Lueth and Yannick Krieger, VLFL-Lib, 2019-APR-10 as class: % ANALYTICAL GEOMETRY) % % Completely new written for SG-Lib 4.5 by Tim Lueth and Yannick Krieger, % Replace the original fnctn of 2012-10-28 % diameter d=z*m (Status of: 2019-04-23) % % Introduced first in SolidGeometry 4.5 % % See also: PLhexalobular, PLinbus, PLgearrackDIN, PLthreadDIN, % SGofCPLrota, PLevolvente, PLgear, SGgearDIN, SGgearpairDIN, SGspurgear, % VLFLgear, VLFLgearhub4shaft, VLFLinternalgear % % LITERATURE: % Traeger, M.F.; Krieger, Y.S.; Lueth, T.C.: "Automated construction of % gear racks, spur gears and helical gears using Matlab & STL files for % rapid manufacturing ", Advanced Intelligent Mechatronics (AIM), 2013 % IEEE/ASME International Conference on, 1603 - 1608 % % [PLG,d,da,df,db]=PLgearDIN([m,z,tig,n]) % === INPUT PARAMETERS === % m: modul; negative means internal gear % z: Teeth number % tig: starting orientation (=gap, 1=tooth) % n: number of nodes per flank; default 5 % === OUTPUT RESULTS ====== % PLG: Point list (2D) % d: rolling circle % da: head diameter % df: foot diameter % db: radius of 2nd contour % % EXAMPLE: Draw a gear with module 1 and 20 teeth (i.e. d=zm, i.e. 20 mm) % PLgearDIN(1,-20,1,100); PL=ans; fullview(1200); cla; PLplot(PL,'m-'); % PLgearDIN(1+-20,1,100); PL=ans; fullview(1200); cla; PLplot(PL,'m-'); % % See also: PLhexalobular, PLinbus, PLgearrackDIN, PLthreadDIN, % SGofCPLrota, PLevolvente, PLgear, SGgearDIN, SGgearpairDIN, SGspurgear, % VLFLgear, VLFLgearhub4shaft, VLFLinternalgear % % % Copyright 2019-2021 Tim C. Lueth |
PLtoothevolvente(rb,z,ra,rf,ratio,n)- returns the evolvent between base circle and outer circle |
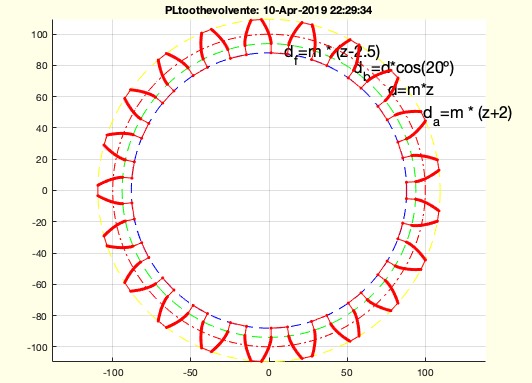 | % PLtoothevolvente(rb,z,ra,rf,ratio,n) - returns the evolvent between base circle and outer circle % (by Tim Lueth & Yannick Krieger, VLFL-Lib, 2019-APR-09 as class: CLOSED % POLYGON LISTS) % % d= z * m % This fnctn by Tim Lueth and Yannick Krieger in SG-Lib 4.5 is a complete % redesign of the former PLgearDIN fnctn of 2012-10-28. It support teeth % numbers starting with 3. (Status of: 2019-04-10) % % Introduced first in SolidGeometry 4.5 % % See also: PLevolvente % % LITERATURE: % Traeger, M.F.; Krieger, Y.S.; Lueth, T.C.: "Automated construction of % gear racks, spur gears and helical gears using Matlab & STL files for % rapid manufacturing ", Advanced Intelligent Mechatronics (AIM), 2013 % IEEE/ASME International Conference on, 1603 - 1608 % % [PLT,PLE,PL2,PLG]=PLtoothevolvente([rb,z,ra,rf,ratio,n]) % === INPUT PARAMETERS === % rb: base circle = d*cos(20/180*pi) % z: number of teeth % ra: outer circle = (z+2)*m % rf: foot circle = df=(z-2.5)*m % ratio: ratio default is 0.7 % n: number of auxiliary points % === OUTPUT RESULTS ====== % PLT: Point list of evolvente % PLE: % PL2: % PLG: % % EXAMPLE: % PLtoothevolvente(100,120,21,20) % % See also: PLevolvente % % % Copyright 2019 Tim C. Lueth |
fullview (wid)- maximize current figure to maximal height og the screen |
 | % fullview (wid) - maximize current figure to maximal height og the screen % (by Tim Lueth, VLFL-Lib, 2019-APR-08 as class: USER INTERFACE) % % Introduced first in SolidGeometry 4.5 % % See also: SGfigure, copyfig, SGfigureannotation, SGfiguremovie, subfig, % togglefig, pastego, copygo % % fullview([wid]) % === INPUT PARAMETERS === % wid: optional width in pixels or percent or [mincol maxcol] % % EXAMPLE: % SGfigure; fullview; shg; pause(1) % SGfigure; fullview(2000); shg; pause(1) % fullview(0.3);shg; pause(1) % fullview([0.3 0.5]);shg; pause(1) % % See also: SGfigure, copyfig, SGfigureannotation, SGfiguremovie, subfig, % togglefig, pastego, copygo % % % Copyright 2019-2020 Tim C. Lueth |
SGofSG(SGO)- converts cell list of solids into a solid struct |
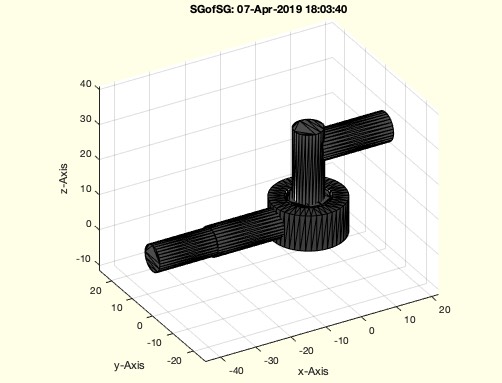 | % SGofSG(SGO) - converts cell list of solids into a solid struct % (by Tim Lueth, VLFL-Lib, 2019-APR-06 as class: SURFACES) % % exactly the same as SGofVLFL (2012), implemented just to avoid not % remembering the name of the already implemented fnctn (Status of: % 2019-04-07) % % Introduced first in SolidGeometry 4.5 % % See also: SGofVLFL % % SG=SGofSG(SGO) % === INPUT PARAMETERS === % SGO: cell list of structs % === OUTPUT RESULTS ====== % SG: Solid struct % % EXAMPLE: % SG=SGbox([30,20,10]) % SGofVLFL({SG,SG,SG}) % Adds even dace colors % SGcheckmeshlab(ans) % % SGsample(20) % SGofSG(SGsample(20)) % % % See also: SGofVLFL % % % Copyright 2019 Tim C. Lueth |
SGcolorfaces(SG,col,ind,alpha)- colors the faces of a solid |
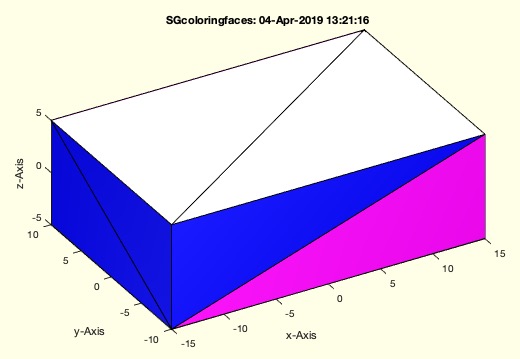 | % SGcolorfaces(SG,col,ind,alpha) - colors the faces of a solid % (by Tim Lueth, VLFL-Lib, 2019-APR-04 as class: SURFACES) % % SG-Lib 4.7: ..sorry name changed from SGcoloringfaces to SGcolorfaces % (Status of: 2019-04-04) % % Introduced first in SolidGeometry 4.5 % % See also: SGcolorseparation, rgbofall, SGwriteSTL % % SG=SGcolorfaces(SG,[col,ind,alpha]) % === INPUT PARAMETERS === % SG: Solid Geometry % col: color % ind: index for coloring % alpha: alpha value % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SG=SGbox([30,20,10]); SG.col='g'; SG.alpha=0.3; SGfigure; SGplot(SG); view(-30,30); % SGcolorfaces(SG,'m',8:12); SG=ans % SGcolorfaces(SG,'b',6:9); SG=ans % SGmeshlab(SG); % MESHLAB HAS A COLOR BUG % % See also: SGcolorseparation, rgbofall, SGwriteSTL % % % Copyright 2019 Tim C. Lueth |
PLshortestpathinCPL(CPL,A,B,shr,n,smo)- returns a path inside of a CPL using A* Zelinzky, Lozano-Perez, Dikstra |
 | % PLshortestpathinCPL(CPL,A,B,shr,n,smo) - returns a path inside of a CPL using A* Zelinzky, Lozano-Perez, Dikstra % (by Tim Lueth, VLFL-Lib, 2019-APR-01 as class: CLOSED POLYGON LISTS) % % This fnctn is helpful not only for path planning in 2D but also to % define CPLs for Solids inside of a limiting contour between start and % endpoints (Base points, Attachment points) % read also the dissertation of Tim Lueth ;-) (Status of: 2019-04-14) % % Introduced first in SolidGeometry 4.5 % % See also: CPLofPLgrowline, PLshortestpathinCPLcost % % [PLB,PL,k,shr]=PLshortestpathinCPL(CPL,A,B,[shr,n,smo]) % === INPUT PARAMETERS === % CPL: CPL % A: Starting Point A inside the CPL % B: End Point B inside the CPL % shr: shrinkage value; default is sofBB/n % n: number of grid points; default is 100 % smo: 'A*', 'Bezier', 'fft' for smoothening % === OUTPUT RESULTS ====== % PLB: Bezier smoothed path % PL: Grid bases path % k: grid numbers % shr: dynamic shrinkage value % % EXAMPLE: % CPL=CPLsample(20); CPL=CPLsample(9); % SGfigure; CPLplot(CPL); shg; PLAB=ginput(2); % PLshortestpathinCPL(CPL,PLAB(1,:), PLAB(2,:)); PL=ans(:,1:2); % CPLofPLgrowline(PL,1,true,true); CPLplot(CPL,'b-'); % % See also: CPLofPLgrowline, PLshortestpathinCPLcost % % % Copyright 2019-2022 Tim C. Lueth |
BBofT(T)- returns the BB for a list of matrices |
 | % BBofT(T) - returns the BB for a list of matrices % (by Tim Lueth, VLFL-Lib, 2019-MÄR-30 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 4.5 % % See also: CPLofBB, BBofVL, BBofSG, BBofCPS, BBofCPL, BBofPS, BBofSGcut, % BBofPose % % BB=BBofT(T) % === INPUT PARAMETERS === % T: List of 3x3 or 4x4 HT matrices % === OUTPUT RESULTS ====== % BB: [xmin xmax ymin y max zmin zmax] % % EXAMPLE: % PS.A=PLcircle(10,36); PS.B=PS.A*2; T0=TofPose(PS), BBofT(T0) % % TofPLpath(PLcircle(10)), BBofT(ans) % % See also: CPLofBB, BBofVL, BBofSG, BBofCPS, BBofCPL, BBofPS, BBofSGcut, % BBofPose % % % Copyright 2019 Tim C. Lueth |
exp_2019_03_28_Shape(PS,aps,lim,smooth,optcrank,optswing)- will be the fnct to automatically defined the effector shape |
 | % exp_2019_03_28_Shape(PS,aps,lim,smooth,optcrank,optswing) - will be the fnct to automatically defined the effector shape % (by Tim Lueth, VLFL-Lib, 2019-MÄR-28 as class: KINEMATICS AND FRAMES) % % This is after 3 month research the next experiment to complete the % experiment exp_2018_12_20_cuttingshape. % It creates the shape of effector, crank and swing by analyzing the % movement, cutting at the work space boarders and searching the path % with minimal length between base point and attachment point. % % (Status of: 2019-04-04) % % Introduced first in SolidGeometry 4.5 % % See also: exp_2019_03_28_Shape % % PS=exp_2019_03_28_Shape(PS,[aps,lim,smooth,optcrank,optswing]) % === INPUT PARAMETERS === % PS: Pose including PS.GAL and PS.GPL % aps: selected solution of PS.GAL % lim: if true; the contours are limited to the limiting order 123 etc. % smooth: CPLfft for smoothening the effector contour % optcrank: if true the cank is shaped % optswing: if true the swing is shaped % === OUTPUT RESULTS ====== % PS: Final Pose including shaped effectors % % EXAMPLE: % PS=PosereadAPD('basecabinet_new') % % PS=checkfourbar3Poseattachpermutation(PS,'',20) % % Posefourbarselectui(PS) % exp_2019_03_28_Shape(PS,307) % % % See also: exp_2019_03_28_Shape % % % Copyright 2019 Tim C. Lueth |
Posefourbarposelimit(PS,aps,ford)- finds the angle limits for a fourbar movement |
 | % Posefourbarposelimit(PS,aps,ford) - finds the angle limits for a fourbar movement % (by Tim Lueth, VLFL-Lib, 2019-MÄR-26 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: checkfourbar3Poseattachpermutation, Posefourbaranimate, % PLofPosecouplercurve, Posefourbarangles, Posefourbaranglelimit % % [PS,wlim,ford]=Posefourbarposelimit(PS,[aps,ford]) % === INPUT PARAMETERS === % PS: Pose struct including GPL and GAL % aps: optional index for test % ford: optional order; default is default order or 123 % === OUTPUT RESULTS ====== % PS: Pose struct with modified PS.GAL List and limited angles! % wlim: limitation for angle [0 0] if no solution possible for input ford % ford: order of poses; 0 if no solution possible for input ford % % EXAMPLE: % PS=Posesample(5) % PS=checkfourbar3Poseattachpermutation(PS,3) % PS=Posefourbarposelimit(PS,2) % Posefourbaranimate(PS,2); % [[1:20]' PS.GAL(1:20,:)] % 1 2 7 17 % Posefourbarposelimit(PS,7,123) % Posefourbarposelimit(PS,7,231) % Posefourbarposelimit(PS,7,312) % Posefourbarposelimit(PS,7,321) % Posefourbarposelimit(PS,7,132) % Posefourbarposelimit(PS,7,213); % Tiger Claw shape % % See also: checkfourbar3Poseattachpermutation, Posefourbaranimate, % PLofPosecouplercurve, Posefourbarangles, Posefourbaranglelimit % % % Copyright 2019 Tim C. Lueth |
number2vec(s)- converst a number into vector of integer |
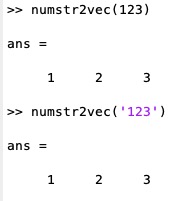 | % number2vec(s) - converst a number into vector of integer % (by Tim Lueth, VLFL-Lib, 2019-MÄR-26 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.5 % % See also: round, vec2number, digitofnum % % vec=number2vec(s) % === INPUT PARAMETERS === % s: string or integer scalar % === OUTPUT RESULTS ====== % vec: vector if integer % % EXAMPLE: % number2vec(123) % number2vec('123') % % See also: round, vec2number, digitofnum % % % Copyright 2019 Tim C. Lueth |
Posefourbarplotcouplercurve(PS,aps,col,lw,cot)- simply plots a coupler curve for fourbar linkage |
 | % Posefourbarplotcouplercurve(PS,aps,col,lw,cot) - simply plots a coupler curve for fourbar linkage % (by Tim Lueth, VLFL-Lib, 2019-MÄR-25 as class: KINEMATICS AND FRAMES) % % plots the coupler curve based on base points A0, B0, and attachment % points A1, B1 % or based on an index "aps" relative to the lists GPL and GAL. (Status % of: 2020-08-20) % % Introduced first in SolidGeometry 4.5 % % See also: PLofPosecouplercurve, Posefourbarselectcouplercurve, % checkfourbar3Poseattachpermutation, checkfourbar2Poseattachpermutation, % checkfourbar1Poseattachpermutation % % h=Posefourbarplotcouplercurve(PS,[aps,col,lw,cot]) % === INPUT PARAMETERS === % PS: Pose including A0, B0, A1, B1, or GPL and GAL % aps: select solution or combination of attachment points in GAL, % requires GPL and GAL % col: col of coupler courve; default is 'r-' % lw: line width of coupler courve; default is 2 % cot: col of coupler orientation; default is 'r-' % === OUTPUT RESULTS ====== % h: handle to line % % EXAMPLE: % PS=Posesample(7) % PS=checkfourbar3Poseattachpermutation(PS,3) % PS=PosefourbarselectAP(PS,1), PS=stripfields(PS,'GPL','GAL') % SGfigure; Posefourbarplotcouplercurve(PS,'','r',2,'b'); % Poseplot(PS); Posefourbarplot(PS); % Posefourbaranimate(PS); % % See also: PLofPosecouplercurve, Posefourbarselectcouplercurve, % checkfourbar3Poseattachpermutation, checkfourbar2Poseattachpermutation, % checkfourbar1Poseattachpermutation % % % Copyright 2019-2021 Tim C. Lueth |
Posetransui(PS,CPLE,GPL,m,gp,lim)- turns and moves interactively poses and recalculate fourbar linkage solutions |
 | % Posetransui(PS,CPLE,GPL,m,gp,lim) - turns and moves interactively poses and recalculate fourbar linkage solutions % (by Tim Lueth, VLFL-Lib, 2019-MÄR-24 as class: KINEMATICS AND FRAMES) % % This interactive fnctn is useful if the 3 Pose syntheses should be used % to identify coupler courves. This fnctn moves the Poses in Space, while % PosetransrelCPLE just moves the Poses relative to the Effector shape. % (Status of: 2019-08-06) % % Introduced first in SolidGeometry 4.5 % % See also: Poseui, PosetransrelCPLE, PosetransrelGPL, % Posefourbarselectui, PosefourbarselectAP, Posefourbarplot, % Posefourbaranimate % % PS=Posetransui(PS,[CPLE,GPL,m,gp,lim]) % === INPUT PARAMETERS === % PS: Pose % CPLE: Optional size or contour of effector % GPL: Grid number or Grid list % m: alternative buffer size of % gp: Grid point density % lim: currently unused % === OUTPUT RESULTS ====== % PS: Pose with changed Lists for A, B, GAL % % EXAMPLE: % fname=loadweb('Posebasecabinet.APD'); PS=PosereadAPD(fname); % PS=checkfourbar3Poseattachpermutation(PS) % PS=Posetransui(PS) % % % See also: Poseui, PosetransrelCPLE, PosetransrelGPL, % Posefourbarselectui, PosefourbarselectAP, Posefourbarplot, % Posefourbaranimate % % % Copyright 2019-2021 Tim C. Lueth |
CPRofPosefourbar(PS,ord)- returns center point list and radius list for a fourbar linkage for a given GPL and GAL |
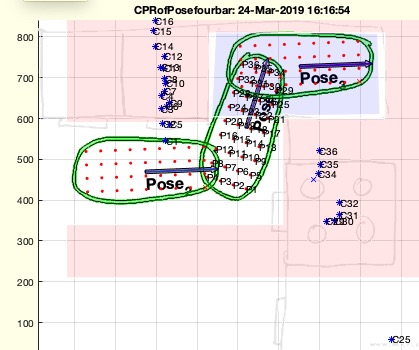 | % CPRofPosefourbar(PS,ord) - returns center point list and radius list for a fourbar linkage for a given GPL and GAL % (by Tim Lueth, VLFL-Lib, 2019-MÄR-24 as class: KINEMATICS AND FRAMES) % % extracted from Posefourbarselectui % (Status of: 2019-03-24) % % Introduced first in SolidGeometry 4.5 % % See also: Posefourbarselectui % % [C,R,P1,P2,P3,api,oi,xpi]=CPRofPosefourbar(PS,[ord]) % === INPUT PARAMETERS === % PS: Pose including GPL and GAL % ord: optional required order % === OUTPUT RESULTS ====== % C: center point list corresponds to GPL % R: radius list corresponds to GPL % P1: GPL Point list transformed into Pose 1 % P2: GPL Point list transformed into Pose 2 % P3: GPL Point list transformed into Pose 3 % api: list of valid points for solutions of GAL => list of invalid % points for solutions of GAL % oi: list of valid solutions of GAL to fullfil order % % EXAMPLE: % fname=loadweb('Posebasecabinet.APD'); PS=PosereadAPD(fname); % PS=checkfourbar3Poseattachpermutation(PS) % CPRofPosefourbar(PS) % % % See also: Posefourbarselectui % % % Copyright 2019 Tim C. Lueth |
sofgca- returns the pixel resolution of gca |
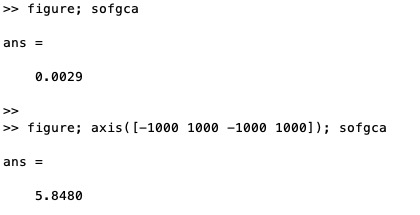 | % sofgca - returns the pixel resolution of gca % (by Tim Lueth, VLFL-Lib, 2019-MÄR-24 as class: USER INTERFACE) % % this fnctn is helpful if interactive fnctns select points near a line, % point or polygon and the figure / axis resultion must be taken into % account to select the items % it is not the same as: % sofBB(axis) % return the maximum coordinate length in gca (Status % of: 2019-03-24) % % Introduced first in SolidGeometry 4.5 % % See also: sofBB % % [s,ss]=sofgca % === OUTPUT RESULTS ====== % s: largest inaccuracy % ss: inaccuracy (pixel size in units) % % EXAMPLE: % figure; sofgca % figure; axis([-1000 1000 -1000 1000]); sofgca, sofBB(axis) % % See also: sofBB % % % Copyright 2019 Tim C. Lueth |
getgcatitle- returns the current title of gca as string |
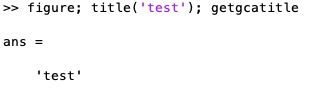 | % getgcatitle - returns the current title of gca as string % (by Tim Lueth, VLFL-Lib, 2019-MÄR-24 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.5 % % See also: SGtitle, getgcapixelsize % % s=getgcatitle % === OUTPUT RESULTS ====== % s: string % % EXAMPLE: % figure; title('test'); getgcatitle % % See also: SGtitle, getgcapixelsize % % % Copyright 2019 Tim C. Lueth |
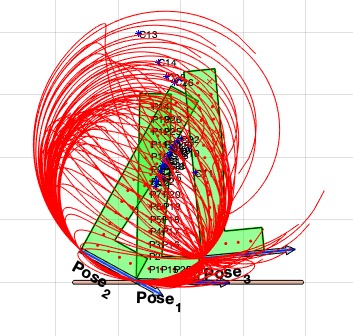
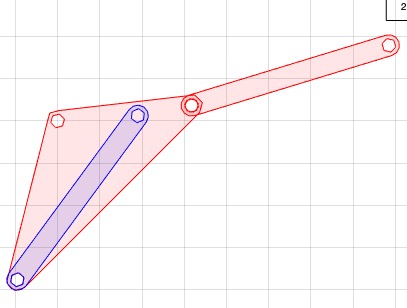
Posefourbaranimate(PS,ap)- animates the fourbar linkage given Pose parameter |
 | % Posefourbaranimate(PS,ap) - animates the fourbar linkage given Pose parameter % (by Tim Lueth, VLFL-Lib, 2019-MÄR-23 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: PosefourbarselectAP, Posefourbarplot, Poseplot, Poseplotspace % % hx=Posefourbaranimate(PS,[ap]) % === INPUT PARAMETERS === % PS: Pose (A0,A1,B0,B1,A) % ap: optional selected solution in GAL if desired % === OUTPUT RESULTS ====== % hx: handle to graphics % % EXAMPLE: % PS=Posesample(7) % PS=checkfourbar3Poseattachpermutation(PS,3) % Creates Solution % PS=PosefourbarselectAP(PS,1) % Selects a solution % SGfigure; Posefourbarplot(PS) % plots the solution % PLofPosecouplercurve(PS,1) % Posefourbaranimate(PS) % % See also: PosefourbarselectAP, Posefourbarplot, Poseplot, Poseplotspace % % % Copyright 2019 Tim C. Lueth |
Posefourbarplot(PS,aps,psnum)- plots the fourbar linkage given Pose parameter |
 | % Posefourbarplot(PS,aps,psnum) - plots the fourbar linkage given Pose parameter % (by Tim Lueth, VLFL-Lib, 2019-MÄR-23 as class: KINEMATICS AND FRAMES) % % ======================================================================= % OBSOLETE (2022-01-20) - USE 'Poseplotsolution' INSTEAD % ======================================================================= % % Introduced first in SolidGeometry 4.5 % % See also: [ Poseplotsolution ] ; PosefourbarselectAP, Poseplot, % Poseplotspace, Posefourbaranimate % % h=Posefourbarplot(PS,[aps,psnum]) % === INPUT PARAMETERS === % PS: Pose (A0,A1,B0,B1,A) % aps: optional different fourbar solution from GAL % psnum: optional different pose to show instead of # 1 % === OUTPUT RESULTS ====== % h: handle to graphics % % EXAMPLE: % PS=Posesample(7) % PS=checkfourbar3Poseattachpermutation(PS,3) % Creates Solutions in a square size 3 % PS=PosefourbarselectAP(PS,1) % Selects a solution % SGfigure; Posefourbarplot(PS) % plots the solution % % % See also: [ Poseplotsolution ] ; PosefourbarselectAP, Poseplot, % Poseplotspace, Posefourbaranimate % % % Copyright 2019-2022 Tim C. Lueth |
PosefourbarselectAP(PS,aps)- simply select a solution from the Pose attachment point list |
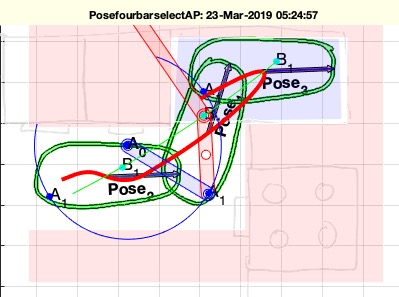 | % PosefourbarselectAP(PS,aps) - simply select a solution from the Pose attachment point list % (by Tim Lueth, VLFL-Lib, 2019-MÄR-23 as class: KINEMATICS AND FRAMES) % % The pose struct must contain the following information % PS.A - Starting Points % PS.B - End Points % PS.CPLE = Contour of the effector % PS.GPL = Grid Point list inside the effector % PS.GAP = Grid Point Attachment List created by % checkfourbar3Poseattachpermutation % THIS FNCTN REMOVES / MODIFIES EXISTING FIELDS: 'A0','B0','A1','B1' % (Status of: 2019-03-23) % % Introduced first in SolidGeometry 4.5 % % See also: checkfourbar3Poseattachpermutation, Posefourbarselectui % % [PS,i,A0,B0,A1,B1]=PosefourbarselectAP(PS,[aps]) % === INPUT PARAMETERS === % PS: Posestruct % aps: solution number or combination of attachment points % === OUTPUT RESULTS ====== % PS: New PS.GPL = Grid Point list, PS.GAP = Grid Point Attachment List % i: Solution selected if aps was used with 2 input parameters % A0: Base Point Crank % B0: Base Point Swing % A1: Attachment Point Crank % B1: Attachment Point Swing % % EXAMPLE: % PS=Posesample(7); % PS=checkfourbar3Poseattachpermutation(PS,3), % PosefourbarselectAP(PS,1); % % See also: checkfourbar3Poseattachpermutation, Posefourbarselectui % % % Copyright 2019 Tim C. Lueth |
PLofT(T0)- returns a point list path from the translation part of a list of HT matrices |
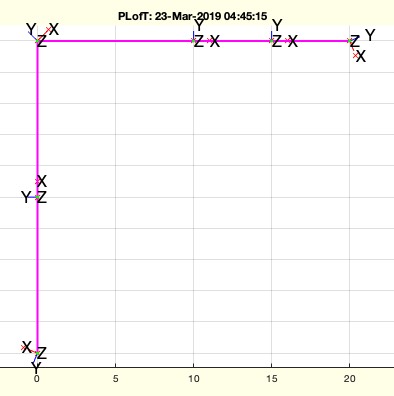 | % PLofT(T0) - returns a point list path from the translation part of a list of HT matrices % (by Tim Lueth, VLFL-Lib, 2019-MÄR-21 as class: KINEMATICS AND FRAMES) % % could also be named PLpathofT (Status of: 2019-03-21) % % Introduced first in SolidGeometry 4.5 % % See also: TofPLpath, radofT % % PL=PLofT(T0) % === INPUT PARAMETERS === % T0: List of matrices in 2D % === OUTPUT RESULTS ====== % PL: Point list % % EXAMPLE: % PLofT(TofPLpath(PLsample(9))) % % See also: TofPLpath, radofT % % % Copyright 2019 Tim C. Lueth |
radofT(T0)- returns only the radian turning angles of a list of T@ matrices |
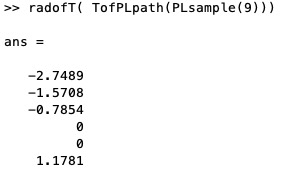 | % radofT(T0) - returns only the radian turning angles of a list of T@ matrices % (by Tim Lueth, VLFL-Lib, 2019-MÄR-21 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: TofPLpath, PLofT % % w=radofT(T0) % === INPUT PARAMETERS === % T0: List of HT matrices in 2D % === OUTPUT RESULTS ====== % w: list of angles (atan2) % % EXAMPLE: % radofT( TofPLpath(PLsample(9))) % % See also: TofPLpath, PLofT % % % Copyright 2019 Tim C. Lueth |
TofPLpath(PL)- creates a list of HT matrices from a point list path |
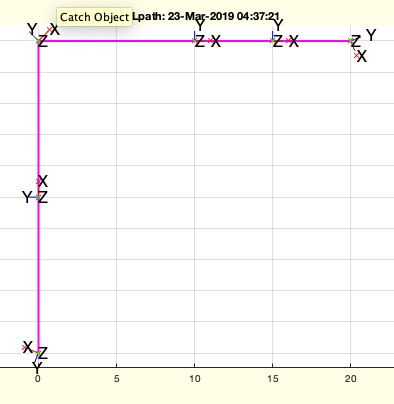 | % TofPLpath(PL) - creates a list of HT matrices from a point list path % (by Tim Lueth, VLFL-Lib, 2019-MÄR-21 as class: KINEMATICS AND FRAMES) % % 2D Fnctn x is in the direction of the path % TofPL creates the center of a cloud % TofPLpath creates a list HT matrices (Status of: 2019-03-21) % % Introduced first in SolidGeometry 4.5 % % See also: radofT, PLofT % % [T0,PS]=TofPLpath(PL) % === INPUT PARAMETERS === % PL: Point list path % === OUTPUT RESULTS ====== % T0: List of T2 homogenoues transformation matrices % PS: pose list % % EXAMPLE: % TofPLpath(PLsample(9)) % % See also: radofT, PLofT % % % Copyright 2019 Tim C. Lueth |
GPLofPoseCPL(PS,CPLE,GPL,m,exactCPL)- returs grid points for an effector identical to to checkfourbar3Poseattachpermutation |
 | % GPLofPoseCPL(PS,CPLE,GPL,m,exactCPL) - returs grid points for an effector identical to to checkfourbar3Poseattachpermutation % (by Tim Lueth, VLFL-Lib, 2019-MÄR-19 as class: KINEMATICS AND FRAMES) % % ======================================================================= % OBSOLETE (2021-12-15) - USE 'GPLauxgridpointsCPS2' INSTEAD % ======================================================================= % % Introduced first in SolidGeometry 4.5 % % See also: [ GPLauxgridpointsCPS2 ] ; GPLauxgridpointsCPS, % GPLauxgridpointsCPS2, center3Poseeffektorgrid % % GPL=GPLofPoseCPL(PS,[CPLE,GPL,m,exactCPL]) % === INPUT PARAMETERS === % PS: Pose; only PS.A and PS.B are used % CPLE: optional CPLE or size of square % GPL: Grid point list relative to origin or resolutin % m: CPLE buffer buffer size or exact CPL % exactCPL: false==outer boundary; true==exact CPLE; default is false % === OUTPUT RESULTS ====== % GPL: Just grid point list for effector or another pose related contour % % EXAMPLE: % PS=Posesample(7); PS.CPLE=PLsquare(6,3); % GPLofPoseCPL(PS) % % % See also: [ GPLauxgridpointsCPS2 ] ; GPLauxgridpointsCPS, % GPLauxgridpointsCPS2, center3Poseeffektorgrid % % % Copyright 2019-2021 Tim C. Lueth |
CPSui(CPS,col,linw);- interactive fnct to create and modify CPLS (Only one Contur) |
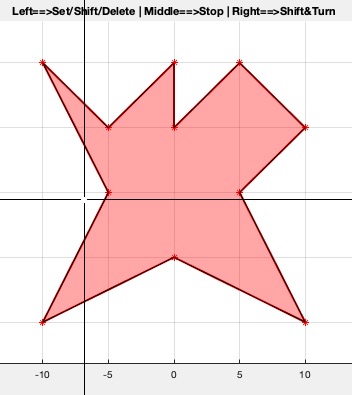 | % CPSui(CPS,col,linw); - interactive fnct to create and modify CPLS (Only one Contur) % (by Tim Lueth, VLFL-Lib, 2019-MÄR-17 as class: CLOSED POLYGON LISTS) % % Left Mouse button => Set remove and shift points by % Right Mouse button => Shift at edges, Rotate at corners % Middle Mouse Button => exit % More or less: CPL=VLui(CPL,'','',col,'',linw); (Status of: 2019-06-20) % % Introduced first in SolidGeometry 4.5 % % See also: VLui, CPSlineui, CPLui, PLui, PLsquareui, PLcircleui, VLFLui, % SGui, CPLsplitui, Poseofimageui, Poseui, SGTui % % CPS=CPSui([CPS,col,linw]); % === INPUT PARAMETERS === % CPS: Optional polyshape % col: Optional color; default is 'r' % linw: optional line width; default is 2 % === OUTPUT RESULTS ====== % CPS: Final CPS % % EXAMPLE: % cla; CPLui() % cla; CPSui(polyshape(CPLsample(3))) % cla; CPSui(polyshape(CPLsample(3)),'b',3) % % See also: VLui, CPSlineui, CPLui, PLui, PLsquareui, PLcircleui, VLFLui, % SGui, CPLsplitui, Poseofimageui, Poseui, SGTui % % % Copyright 2019 Tim C. Lueth |
CPLui(CPL,col,linw);- interactive fnct to create and modify CPLS (Only one Contur) |
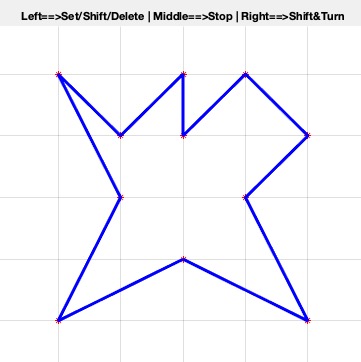 | % CPLui(CPL,col,linw); - interactive fnct to create and modify CPLS (Only one Contur) % (by Tim Lueth, VLFL-Lib, 2019-MÄR-17 as class: CLOSED POLYGON LISTS) % % Left Mouse button => Set remove and shift points by % Right Mouse button => Shift at edges, Rotate at corners % Middle Mouse Button => exit % More or less: CPL=VLui(CPL,'','',col,'',linw); (Status of: 2019-06-20) % % Introduced first in SolidGeometry 4.5 % % See also: VLui, CPSlineui, CPSui, PLui, PLsquareui, PLcircleui, VLFLui, % SGui, CPLsplitui, Poseofimageui, Poseui, SGTui % % CPL=CPLui(CPL,[col,linw]); % === INPUT PARAMETERS === % CPL: Optional CPL; default is []; % col: Optional color; default is 'r-' % linw: optional line width; default is 2 % === OUTPUT RESULTS ====== % CPL: Final CPL % % EXAMPLE: % cla; CPLui() % cla; CPLui(CPLsample(3)) % cla; CPLui(CPLsample(3),'b-',3) % % See also: VLui, CPSlineui, CPSui, PLui, PLsquareui, PLcircleui, VLFLui, % SGui, CPLsplitui, Poseofimageui, Poseui, SGTui % % % Copyright 2019 Tim C. Lueth |
CPLinsertpoint(CPL,p,tol)- inserts a point at an appropriate condition into a CPL |
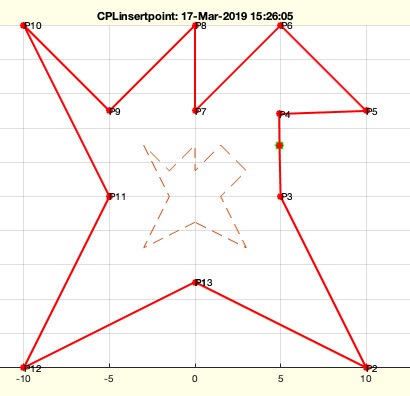 | % CPLinsertpoint(CPL,p,tol) - inserts a point at an appropriate condition into a CPL % (by Tim Lueth, VLFL-Lib, 2019-MÄR-17 as class: CLOSED POLYGON LISTS) % % This fnctn is extremely hard to test for errors. % ea is the entry of the best fitting contour % eaa is the complete list for all contours % c si mind dist_s dist_e % (Status of: 2019-03-17) % % Introduced first in SolidGeometry 4.5 % % See also: CVLpointdistancetoedge, mirroringatline3D % % [CPLN,ea,eaa,ok]=CPLinsertpoint(CPL,p,[tol]) % === INPUT PARAMETERS === % CPL: CPL % p: point % tol: tolerance for inserting a new point % === OUTPUT RESULTS ====== % CPLN: New CPL with integrated Point % ea: information on contour the point was inserted % eaa: information on all contours ov CPL % ok: false if the point was to near % % EXAMPLE: % close all; SGfigure; CPL=CPLsample(7); CPLplot(CPL); view(0,90); % shg; axis(BBgrow(axis,1.1));CPLplot(CPL); p=ginput(1); CPL=CPLinsertpoint(CPL,p,1); cla; CPLplot(CPL,'c*-',2); % % % See also: CVLpointdistancetoedge, mirroringatline3D % % % Copyright 2019 Tim C. Lueth |
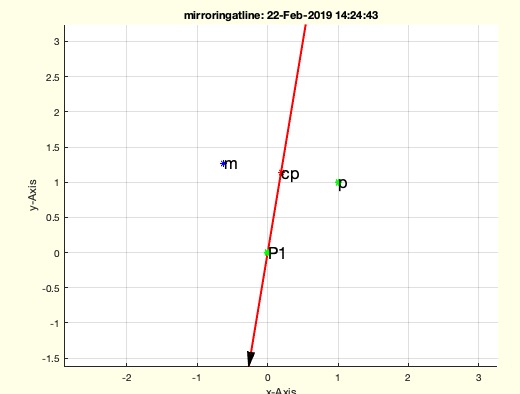
mirroringatline3D(P1,ev,p)- mirrors a point at a straight line in 3D |
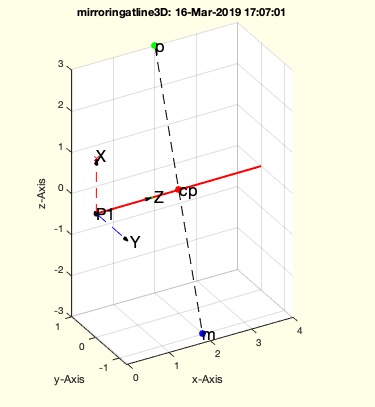 | % mirroringatline3D(P1,ev,p) - mirrors a point at a straight line in 3D % (by Tim Lueth, VLFL-Lib, 2019-MÄR-16 as class: ANALYTICAL GEOMETRY) % % Should be renamed into VLmirroratline (Status of: 2019-03-16) % % Introduced first in SolidGeometry 4.5 % % See also: PLcross2Lines, PLcrossCPLline, mirroringatline2D % % [mp,do,cp,ov,dz]=mirroringatline3D(P1,ev,p) % === INPUT PARAMETERS === % P1: Point on line % ev: direction vector % p: point to mirror % === OUTPUT RESULTS ====== % mp: mirror point % do: distance to straight line (wrt to ev) % cp: crossing point on line % ov: orthogonal vector to straight line from p to cp % dz: distance of cp from P1 % % EXAMPLE: % mirroringatline3D([0 0 0],[1 0 0],[2 1 3]) % mirroringatline3D([0 0 0],[0 1 0],[2 1 3]) % mirroringatline3D([0 0 0],[0 0 1],[2 1 3]) % % See also: PLcross2Lines, PLcrossCPLline, mirroringatline2D % % % Copyright 2019 Tim C. Lueth |
BBgrow(bb,m)- increases the size of a Boundary Box |
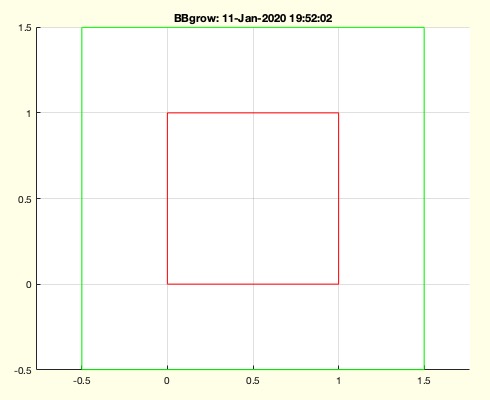 | % BBgrow(bb,m) - increases the size of a Boundary Box % (by Tim Lueth, VLFL-Lib, 2019-MÄR-16 as class: AUXILIARY PROCEDURES) % % in contrast to BBaddtolerance , this fnctn BBgrowdoes not add a % tolerance but magnify the BB. % this fnctn is NOT able to handle lists of BBs yet! (Status of: % 2020-01-11) % % Introduced first in SolidGeometry 4.5 % % See also: axis, BBofSG, BBaddtolerance % % nbb=BBgrow(bb,m) % === INPUT PARAMETERS === % bb: bounding box or axis % m: growing factor % === OUTPUT RESULTS ====== % nbb: new bounding box % % EXAMPLE: % BBgrow([0 1 0 1 ],1) % unchanged % BBgrow([0 1 0 1 ],2) % magnified around the center % BBgrow([0 1 0 1 0 1],2) % magnified around the center % % See also: axis, BBofSG, BBaddtolerance % % % Copyright 2019-2020 Tim C. Lueth |
circ2poly(n,r)- ratio of polygon radius between if turned pi/n radiands |
 | % circ2poly(n,r) - ratio of polygon radius between if turned pi/n radiands % (by Tim Lueth, VLFL-Lib, 2019-MÄR-13 as class: ANALYTICAL GEOMETRY) % % same as dofn (Status of: 2019-03-13) % % Introduced first in SolidGeometry 4.5 % % See also: dofn, sofrd, phiofsr, nofrd % % m=circ2poly(n,[r]) % === INPUT PARAMETERS === % n: number of polygon edges/corners % r: optional radius % === OUTPUT RESULTS ====== % m: magnification >1 % % EXAMPLE: % circ2poly(6) % % See also: dofn, sofrd, phiofsr, nofrd % % % Copyright 2019 Tim C. Lueth |
PLofPosecouplercurve(PS,aps,npnt,ncur)- returns the path and the matrix list of the pose movement |
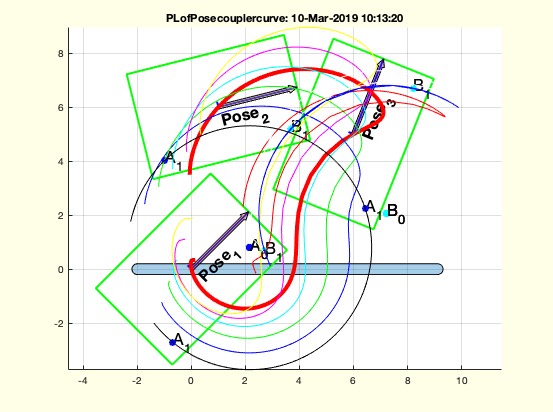 | % PLofPosecouplercurve(PS,aps,npnt,ncur) - returns the path and the matrix list of the pose movement % (by Tim Lueth, VLFL-Lib, 2019-MÄR-09 as class: KINEMATICS AND FRAMES) % % This fnctn is important to understand % 1st: that the coupler curve PL0 is in fact just the position movement % of the pose but for understanding the movement the HT-List T0 is even % more important % 2nd: Although all points on the effector execute exactly the same % motion/rotation (T0), their relative position to the origin of the pose % resulted in a changed path, but they all have the same rotational % motion! % 3rd: It will be possible to search for two points in the immediate % neighbourhood (attachment points) for each path of motion, which % execute a circular path if the transformation matrix is included. Thus % the corresponding fourbar linkage can also be constructed from a % movement path. % (Status of: 2019-03-27) % % Introduced first in SolidGeometry 4.5 % % See also: Posefourbarplotcouplercurve, % checkfourbar3Poseattachpermutation, FourBarLinkageofCouplercurve, % Posefourbarselectcouplercurve % % [PL0,T0,wcr,TA0,TB0,TA1,TB1]=PLofPosecouplercurve(PS,[aps,npnt,ncur]) % === INPUT PARAMETERS === % PS: Pose incl. GPL and GAL % aps: index in GAL or [iA iB] for GAL % npnt: number of points of the curve % ncur: number of curves desired; default=0 (Pose Coupler Curve);(will be % removed) % === OUTPUT RESULTS ====== % PL0: Point list of Coupler Points Movement % T0: Transformation matrix list of Coupler Points Movement % wcr: angle list of crank returned by invkinplan2 % TA0: Transformation matrix list of joint A0 (only rotation) % TB0: Transformation matrix list of joint B0 (only rotation) % TA1: Transformation matrix list of Attachment point A1 (circular % Movement) % TB1: Transformation matrix list of Attachment point B1 (circular % Movement) % % EXAMPLE: % PS=Posesample(7);PS.CPLE = PLsquare([6 4]); checkfourbar3Poseattachpermutation(PS); PS=ans; % close all; PLofPosecouplercurve(PS,1,'',7); % % See also: Posefourbarplotcouplercurve, % checkfourbar3Poseattachpermutation, FourBarLinkageofCouplercurve, % Posefourbarselectcouplercurve % % % Copyright 2019 Tim C. Lueth |
PLmeancluster(PL,res)- converts a point list into a mean values point list |
 | % PLmeancluster(PL,res) - converts a point list into a mean values point list % (by Tim Lueth, VLFL-Lib, 2019-MÄR-08 as class: ANALYTICAL GEOMETRY) % % clusters points of a list by a simple grid resolution. In contrast to % simple using rounddiv, the mean value of the points that belong to the % same grid point is calculated and replaces the original coordinates of % the List % either us iconofCPL or CPLdisteuclidcontur before PLmeancluster (Status % of: 2019-06-30) % % Introduced first in SolidGeometry 4.5 % % See also: iconofCPL, rounddiv, unique, CPLofdrawing, CPLdisteuclidcontur % % % % [PLM,ia,ib,PLR]=PLmeancluster(PL,[res]) % === INPUT PARAMETERS === % PL: point or verteex list [n x m] % res: resolution four rounding; default is 0.5 (will be changed in % future) % === OUTPUT RESULTS ====== % PLM: Point list with mean values % ia: index of short list in original list % ib: index of original list in short list % PLR: Point list with grid rounded points % % EXAMPLE: % PLmeancluster(rand(1000,2)); % PLmeancluster(rand(1000,2),3); % [PLM,ia,ib]=PLmeancluster(rand(1000,3)); PLM(ia,:) % returns the shortened PL list % PLmeancluster(CPLaddauxpoints(CPLsample(29),.3),.3) $ Downsamplint to 0.3 % % % See also: iconofCPL, rounddiv, unique, CPLofdrawing, CPLdisteuclidcontur % % % % % Copyright 2019 Tim C. Lueth |
backspstr(str)- returns a backspace character string to remove the given string |
 | % backspstr(str) - returns a backspace character string to remove the given string % (by Tim Lueth, VLFL-Lib, 2019-MÄR-07 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.5 % % See also: fprintfvec % % bs=backspstr(str) % === INPUT PARAMETERS === % str: string to remove % === OUTPUT RESULTS ====== % bs: backspaces to remove string % % EXAMPLE: % backspstr('this is a test') % % See also: fprintfvec % % % Copyright 2019 Tim C. Lueth |
SGofCPLcommandui(CLINE)- Simple commandline based 2.5 solid modeler for the use of a caliper |
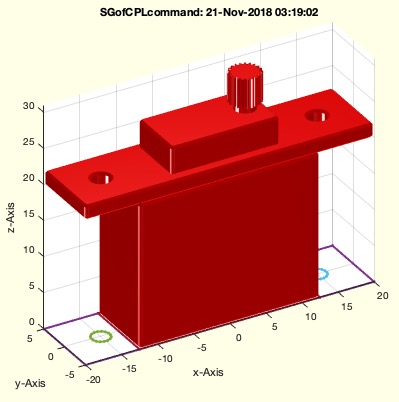 | % SGofCPLcommandui(CLINE) - Simple commandline based 2.5 solid modeler for the use of a caliper % (by Tim Lueth, VLFL-Lib, 2019-MÄR-07 as class: PARAMETRIC DESIGN) % % First a Contour is designed; afterwards the contour is extruded; and % set below the already designed existing solid; ATTENTION IF YOU MELT % THE PARTS AFTERWARDS AVOID edges with same planes % % SGofCPLcommands supports the following commands, separated by commas: % See publishable tutorial VLFL_EXP45.m % % === CPL shape commands ================================= % b x-size y-size [d] => Box as rectangle or displace trapaze % c diameter x-coord y-coord => Cylinder % cs phi r-outer r-inner offset => Cylinder segment with angle % co r-outer length r-inner => Cylinder oval segment with optional % holes % d diameter x-coord y-coord n-faces => Drilling hole at x/y with n edges % g diameter teeth-nr x-coord y-coord => Gear % ms diameter-1 diameter-2 => Motor shaft contour % % === CPL manipulation commands ================================= % move x-coord y-coord => Move the CPL relatively % cp x-coord y-coord => Center point change % ch distance radius => Convex hull in distance with optional radius % dupc x-copies y copies distance => Duplicates contour in as x y % pattern % dupr radius number offset => Duplicates contour radial in n copies % % === CPL stack commands ================================= % enter => current CPL is shifted to the stack % swap => current CPL is swaped with CPL on stack % +/add => current CPL is added to stack CPL % -/sub => current CPL is substracted from stack CPL % rem => stack CPL ist substracted from current CPL % xor => current CPL is intersected with stack CPL => avoid creates % non manifold points/edges % hs height => stack connection using height % % === CPL to solid commands ================================= % h height z-displacement => Height of the extruded solid % hc height z-displacement => Height of extrusion with smoothed edges % r angle pitch => Extrusion by rotation (degree) and optional pitch % % === SG element commands ================================= % scr mm length diameter => Screw/Cutter/Nut threat of diameter and % length % sph diameter end-angle => Sphere % % === SG manipulation commands ================================= % move x-coord y-coord => Move the solid relatively % rotx degree => rotate around the x-axis % roty degree => rotate around the y-axis % rotz degree => rotate around the z-axis % melt => Boolean addition of all solid elements % text string => Add a string to the largest surface % dupr number => Duplicates contour radial in n copies % hollow wall => Creates a hollow solid % shell wall distance => Creates a shell for the solid % cutz z1 z2 => Cuts the solid at z1 and z2 % % === SG save and restore commands ================================= % save name => saves the solid into name.SG % load name => loads a solid from name.SG % write name => saves the solid into File name.STL % read name => reads the solid from File name.STL % % === SG stack commands ================================= % enter => current SG is shifted to the stack % swap => current SG is swaped with SG on stack % clear nr => Clear stack content 1..n % +/add => current SG is added to stack SG % -/sub => current SG is substracted from stack SG % rem => stack SG is substracted from current SG % xor => current SG is intersected with stack SG => avoid creates non % manifold points/edges % rel command parameter => current SG is move relatively to stack % % 2018-11-21 Tim Lueth (implementation) and Yilun Sun (requests) % discussed the boolean RPN (reverse Polish Notation / Forth) concept % using stacks % (Status of: 2019-03-07) % % Introduced first in SolidGeometry 4.5 % % See also: SGofCPLui, SGofCPLz, SGsurfacemeltbool, SGsurfacemeltbool, % SGofCPLcommand % % SG=SGofCPLcommandui([CLINE]) % === INPUT PARAMETERS === % CLINE: CPL command string, use '?' for info % === OUTPUT RESULTS ====== % SG: solid Geometry % % EXAMPLE: % SGofCPLcommand('g 4 21, h 4'); % Gear with diameter 4mm, 21 teeth, height 4 mm % SGofCPLcommand('g 4 21, h 4, c 3, h 1, move 5 0, b 40 10 ,h 2,b 25 10 , h 20') % SGofCPLcommand('g 4 21, h 4, c 3, h 1, move 5 0, b 40 10 ,d 2.5 -15 0, d 2.5 +15 0, h 2,b 25 10 , h 20') % SGofCPLcommand('g 4 21, h 4, c 3, h 1, move 5 0, b 15 8, h 4, b 40 10 ,d 2.5 -15 0, d 2.5 +15 0, h 2,b 25 10 , h 20') % SGofCPLcommand('g 4 21, h 4, c 3, h 1, move 5 0, b 15 8, hc 4, b 40 10 ,d 2.5 -15 0, d 2.5 +15 0, hc 2,b 25 10 , hc 20') % SGofCPLcommand('g 5 10, enter, b 10 30 10') % SGofCPLcommand('g 5 10, enter, b 10 30 10') % SGofCPLcommand('g 5 10, enter, b 10 30 10, xor, h 4') % % See also: SGofCPLui, SGofCPLz, SGsurfacemeltbool, SGsurfacemeltbool, % SGofCPLcommand % % % Copyright 2019 Tim C. Lueth |
keyboardlineeditor(h,CLINE,NLINE,RLINE,CRNUM);- implements a text editor for interactive programming |
 | % keyboardlineeditor(h,CLINE,NLINE,RLINE,CRNUM); - implements a text editor for interactive programming % (by Tim Lueth, VLFL-Lib, 2019-MÄR-07 as class: USER INTERFACE) % % This is a very powerful keyboard input editor. With it you can % interactively write texts line by line over several lines. You can move % the cursor within one line or over several lines. % The fnctn returns its necessary input parameters as output parameters, % making it possible to restart the editor over and over again. % The fnctn is used within the SGofCPLcommandui to analyze and draw the % drawing chain after each space character. (Status of: 2019-03-07) % % Introduced first in SolidGeometry 4.5 % % See also: getkeyboardchar, SGofCPLcommandui % % [c,LR,CLINE,NLINE,RLINE]=keyboardlineeditor(h,[CLINE,NLINE,RLINE,CRNUM] % ); % === INPUT PARAMETERS === % h: handle to figure the keyboard is attached to % CLINE: Textbuffer, Text line or empty % NLINE: Textbuffer behind current line; or empty % RLINE: Textbuffer, same line but right hand of cursor % CRNUM: uint8 character list of escape characters; default is 13 (CR) % === OUTPUT RESULTS ====== % c: last pressed key % LR: Text row left of cursor % CLINE: Complete text buffer including current line % NLINE: Rest of text buffer after current line % RLINE: Current text line rifht hand of cursor % % EXAMPLE: % SGfigure; h=figure; keyboardlineeditor(h,'just edit this line','','',[13 65]) % 'A' will stop % % See also: getkeyboardchar, SGofCPLcommandui % % % Copyright 2019 Tim C. Lueth |
getkeyboardchar(bycallbackfnct)- wait for keyboardkey pressed |
 | % getkeyboardchar(bycallbackfnct) - wait for keyboardkey pressed % (by Tim Lueth, VLFL-Lib, 2019-MÄR-07 as class: USER INTERFACE) % % this fnctn implements the two possibilities of getting a keyboardchar % as uint8 that are supported by Matlab either by % ginput(1) or % callback fnctn in gcf % the callback fnctn is able to return also special keys such as pageup % or pagedown. in this case the uint8 vector does contain more than one % element % CNTRL-C interrupts both fnctns (Status of: 2019-03-07) % % Introduced first in SolidGeometry 4.5 % % See also: ginput, getkeyboardcharpause, waitforfigurekeyboardchar % % c=getkeyboardchar([bycallbackfnct]) % === INPUT PARAMETERS === % bycallbackfnct: if true, a call bakc fnctn is used, if false ginput; % default is true; % === OUTPUT RESULTS ====== % c: % % EXAMPLE: % close all; getkeyboardchar(false), char(ans) % close all; getkeyboardchar(true), char(ans) % % See also: ginput, getkeyboardcharpause, waitforfigurekeyboardchar % % % Copyright 2019-2020 Tim C. Lueth |
CPLfft(CPL,nf,np)- returns a fourier frequency reduced contour shape |
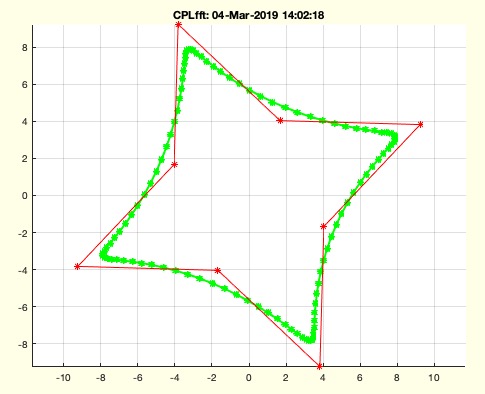 | % CPLfft(CPL,nf,np) - returns a fourier frequency reduced contour shape % (by Tim Lueth, VLFL-Lib, 2019-MÄR-04 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: CPLBezier, CPLremstraightAmin % % CPLR=CPLfft(CPL,[nf,np]) % === INPUT PARAMETERS === % CPL: Contour % nf: Number of used frequencies % np: number of points of the CPL; default is 100; % === OUTPUT RESULTS ====== % CPLR: Resulting Contour % % EXAMPLE: % CPLfft(CPLsample(6)) % CPLfft(PLtransT(PLsquare(4,3),TofR(rot(10),[30 30])),20); % CPLremstraightAmin(CPLfft(PLtransT(PLsquare(4,3),TofR(rot(10),[30 30])),20),.01); % % See also: CPLBezier, CPLremstraightAmin % % % Copyright 2019 Tim C. Lueth |
iconofCPL(CPL,graysc,m,turn)- creates an grayscale image/icon of a contour |
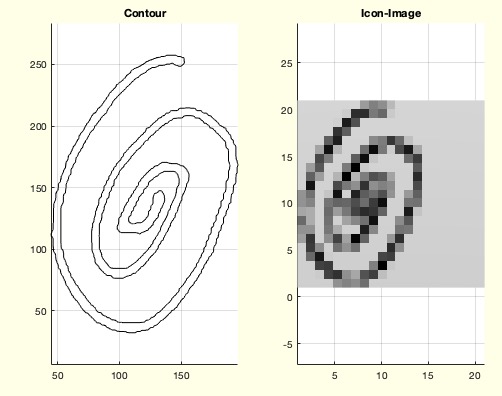 | % iconofCPL(CPL,graysc,m,turn) - creates an grayscale image/icon of a contour % (by Tim Lueth, VLFL-Lib, 2019-MÄR-04 as class: IMAGES) % % This fnctn is useful either for creating icon for the user interface or % for patter recogniton of hand drawing sketches (Status of: 2019-03-08) % % Introduced first in SolidGeometry 4.5 % % See also: CPLofimage, PLmeancluster, imageoftext, imSetofchars % % [I,PL]=iconofCPL(CPL,[graysc,m,turn]) % === INPUT PARAMETERS === % CPL: Closed Polygon line % graysc: true= greyscale; false=binary % m: size of icon; default is 16 % turn: true == transform tp eigenvectors; default is true % === OUTPUT RESULTS ====== % I: Image of size [m x m]; maximum intensity [0..1] % PL: PL optional point list for all values of I==0 (binary) % % EXAMPLE: % iconofCPL(CPLsample(3),'','',false) % iconofCPL(CPLsample(3),'',21,false) % iconofCPL(CPLsample(3),true,21,false) % iconofCPL(CPLsample(3)) % % See also: CPLofimage, PLmeancluster, imageoftext, imSetofchars % % % Copyright 2019 Tim C. Lueth |
CPLofCPS(CPS);- returns a CPL from a CPS or an array of polyshapes |
 | % CPLofCPS(CPS); - returns a CPL from a CPS or an array of polyshapes % (by Tim Lueth, VLFL-Lib, 2019-MÄR-03 as class: CLOSED POLYGON LISTS) % % same as CPLofpolyshape. % All polyshape fnctns will be replaced by CPS fnctn to support % (CPL,CPLS, polyshape and polygons) (Status of: 2019-03-04) % % Introduced first in SolidGeometry 4.5 % % See also: CPLofpolyshape % % CPL=CPLofCPS(CPS); % === INPUT PARAMETERS === % CPS): CPS or polyshape % === OUTPUT RESULTS ====== % CPL: CPL % % See also: CPLofpolyshape % % % Copyright 2019 Tim C. Lueth |
digitofnum(n,d)- returns the digit at a specific position |
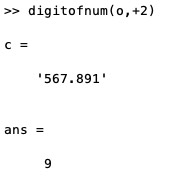 | % digitofnum(n,d) - returns the digit at a specific position % (by Tim Lueth, VLFL-Lib, 2019-MÄR-02 as class: AUXILIARY PROCEDURES) % % uses the same rule for digit as rounddiv % -1= 10^+1 % 0= 10^0 % 1= 10^-1 (Status of: 2019-06-30) % % Introduced first in SolidGeometry 4.5 % % See also: round, numstr2vec, vec2numstr % % h=digitofnum(n,d) % === INPUT PARAMETERS === % n: number % d: digit of number % === OUTPUT RESULTS ====== % h: digit value % % EXAMPLE: % o=567.891 % digitofnum(o,-2) % digitofnum(o,+2) % % See also: round, numstr2vec, vec2numstr % % % Copyright 2019 Tim C. Lueth |
whoisIP (ipstr)- opens a www browser calling a www page for whi is ip address |
 | % whoisIP (ipstr) - opens a www browser calling a www page for whi is ip address % (by Tim Lueth, VLFL-Lib, 2019-MÄR-01 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.5 % % See also: whoisPID, whoisTCP, lastlogins, userIP % % whoisIP([ipstr]) % === INPUT PARAMETERS === % ipstr: ip address % % EXAMPLE: % whoisIP('192.187.200.116') % [i,e]=userip; whoisIP(e) % % % See also: whoisPID, whoisTCP, lastlogins, userIP % % % Copyright 2019-2020 Tim C. Lueth |
Posefourbarselectui(PS,ord)- interactive tool to plot poses and to select two attachment/base points for a fourbar linkage |
 | % Posefourbarselectui(PS,ord) - interactive tool to plot poses and to select two attachment/base points for a fourbar linkage % (by Tim Lueth, VLFL-Lib, 2019-MÄR-01 as class: KINEMATICS AND FRAMES) % % ATTENTION THIS FNCTN IS ABLE TO MODIFY THE POSE STRUCT AS LONG AS THE % WINDOW IS OPEN! % The pose struct must contain the following information % PS.A - Starting Points % PS.B - End Points % PS.CPLE = Contour of the effector % % THIS FNCTN REMOVES / MODIFIES EXISTING FIELDS: 'A0','B0','A1','B1' % PS.GPL = Grid Point list inside the effector % PS.GAP = Grid Point Attachment List created by % checkfourbar3Poseattachpermutation (Status of: 2019-03-01) % % Introduced first in SolidGeometry 4.5 % % See also: checkfourbar3Poseattachpermutation % % PS=Posefourbarselectui(PS,[ord]) % === INPUT PARAMETERS === % PS: Posestruct % ord: Optional required order such as 123 % === OUTPUT RESULTS ====== % PS: New PS.GPL = Grid Point list, PS.GAP = Grid Point Attachment List % % EXAMPLE: % PS=Posesample(7), Posefourbarselectui(PS); % PS=checkfourbar3Poseattachpermutation(PS,3), Posefourbarselectui(PS); % PS=checkfourbar3Poseattachpermutation(PS,PLsquare(6,2)), Posefourbarselectui(PS); % CPL=[PLsquare(6,4);nan nan;PLsquare(3,2)]; % PS=checkfourbar3Poseattachpermutation(PS,CPL,.4,'',true), Posefourbarselectui(PS); % % See also: checkfourbar3Poseattachpermutation % % % Copyright 2019 Tim C. Lueth |
GPLauxgridpointsCPS(CL,dx,dy)- returns for a given 2D contour point list auxiliary points to define a plane surface |
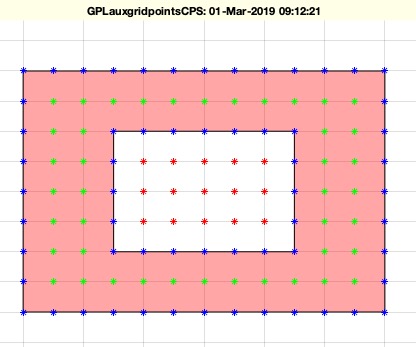 | % GPLauxgridpointsCPS(CL,dx,dy) - returns for a given 2D contour point list auxiliary points to define a plane surface % (by Tim Lueth, VLFL-Lib, 2019-MÄR-01 as class: AUXILIARY PROCEDURES) % % This fnctn replaces GPLauxgridpointsCL and GPLauxgridpointsPLEL! % The fnctn is based on a cartesian meshgrid that us reshaped to form a % new points list. The fnctn uses insideCPS to generate the final index % list % 1=inside CPL 0=on CPL -1=Outside CPL (Status of: 2021-12-01) % % Introduced first in SolidGeometry 4.5 % % See also: RLaddauxpoints, RLdelauxpoints, GPLauxgridpointsCL, % PLELaddauxpoints, GPLauxgridpointsPLEL, GPLauxgridpointsCPS2 % % [GPL,k,X,Y]=GPLauxgridpointsCPS(CL,dx,[dy]) % === INPUT PARAMETERS === % CL: Contour list 2D [x y] % dx: Maximum auxiliary points in x % dy: Maximum auxiliary points in y % === OUTPUT RESULTS ====== % GPL: Grid point list % k: index whether k is inside or outside; use k=reshape(k,size(X)) % X: X grid used for calucaltion % Y: Y grid used for calucaltion % % EXAMPLE: % CPL=[PLsquare(6,4);nan nan;PLsquare(3,2)]; % GPLauxgridpointsCPS(CPL,0.5) % % See also: RLaddauxpoints, RLdelauxpoints, GPLauxgridpointsCL, % PLELaddauxpoints, GPLauxgridpointsPLEL, GPLauxgridpointsCPS2 % % % Copyright 2019-2021 Tim C. Lueth |
insideCPS(CPL,PL);- tests whether a point list is inside of a CPL polyshape or CPS |
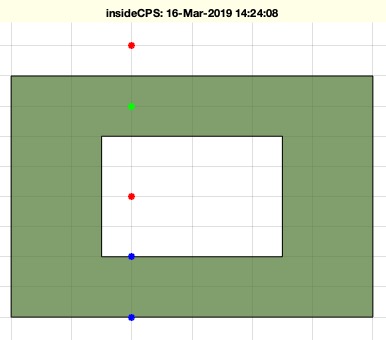 | % insideCPS(CPL,PL); - tests whether a point list is inside of a CPL polyshape or CPS % (by Tim Lueth, VLFL-Lib, 2019-MÄR-01 as class: ANALYZING PROCEDURES) % % SLOW FNCTN FOR SINGLE POINTS - Use distanceVLtoVLEL to search on % Contours % Replaces insideC, insidePLEL, insideinsidePLELdelaunay (which is TL's % implementation of insideCPS) % In contrast to insideC, this fnctn supports and uses the polyshape % concept with several regions and holes: if there is no need for inside % and on contour use "isinterior" directly % +1 means point is inside % -1 means point is outside % 0 means point is on the contour (Status of: 2020-10-04) % % Introduced first in SolidGeometry 4.5 % % See also: distanceVLtoVLEL, insideC, isinterior, insidePLEL, % insidePLELdelaunay % % k=insideCPS(CPL,PL); % === INPUT PARAMETERS === % CPL: Vertex list of the contour % PL: Point to check % === OUTPUT RESULTS ====== % k: +1==inside, -1==outside, 0== on the contour % % EXAMPLE: % CPL=[PLsquare(6,4);nan nan;PLsquare(3,2)]; % insideCPS(CPL,[-1 -1; -1 0; -1 1.5; -1 2.5; -1 -2]) % insideCPS(CPL,[-1 -1; -1 0; -1 1.5; -1 2.5; -1 -2]+[-2 0]) % % See also: distanceVLtoVLEL, insideC, isinterior, insidePLEL, % insidePLELdelaunay % % % Copyright 2019-2020 Tim C. Lueth |
CPLharbour(CPL,inside,d)- returns the inner contour of an area limited by line type areas |
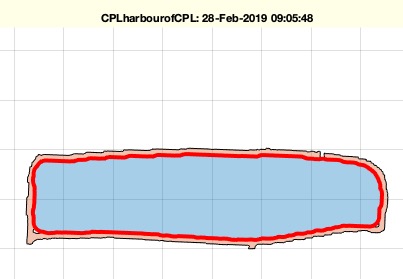 | % CPLharbour(CPL,inside,d) - returns the inner contour of an area limited by line type areas % (by Tim Lueth, VLFL-Lib, 2019-FEB-28 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: CPLconvexhull, CPLconvexhulldelaunay, delaunayofCPL, % CPLfillin, CPLfillinside, CPLfillgap % % [CPLN,ps]=CPLharbour(CPL,[inside,d]) % === INPUT PARAMETERS === % CPL: CPL or Polyshape % inside: true = inside; false = outside area % d: distance to bridge % === OUTPUT RESULTS ====== % CPLN: CPLN % ps: polyshape % % EXAMPLE: % CPLharbour(CPLsample(29)); % CPLharbour(CPLsample(29),false); % CPLharbour(CPLsample(29),false,0); % CPLharbour(CPLsample(18),false,-1); % % See also: CPLconvexhull, CPLconvexhulldelaunay, delaunayofCPL, % CPLfillin, CPLfillinside, CPLfillgap % % % Copyright 2019-2020 Tim C. Lueth |
L1L2RofBasenAttachmentpoints(A0,B0,A1,B1)- returns dimensions from base points and attachment points |
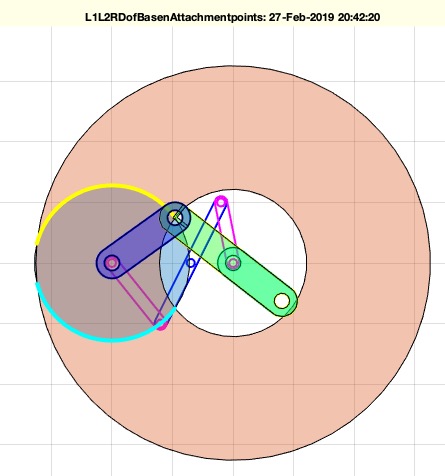 | % L1L2RofBasenAttachmentpoints(A0,B0,A1,B1) - returns dimensions from base points and attachment points % (by Tim Lueth, VLFL-Lib, 2019-FEB-27 as class: KINEMATICS AND FRAMES) % % It is important to understand that the positions of the base and % attachment points of the coupler already contain an implicit % information about the elbow configuration. While the length values for % l1,l2,r,d can be determined trivially, this does not apply to the elbow % configuration. % (Status of: 2019-02-27) % % Introduced first in SolidGeometry 4.5 % % See also: CPLfourbarlinkage2, fourBarLinkageplotanimui, % L1L2RofBasenAttachmentpoints % % % [l1,l2,r,eb,d]=L1L2RofBasenAttachmentpoints(A0,B0,A1,B1) % === INPUT PARAMETERS === % A0: Base Point A0 % B0: Base Point B0 % A1: Attachment Point A1 % B1: Attachment Point B1 % === OUTPUT RESULTS ====== % l1: length of swing % l2: length of coupler % r: length of crank % eb: ellbow down (1) or ellbow up(2) % d: distance between the base points % % EXAMPLE: % L1L2RofBasenAttachmentpoints([0 0;10 0; 4 +5; 9 5]); [l1,l2,r,eb]=L1L2RofBasenAttachmentpoints([0 0;10 0; 4 +5; 9 5]) % L1L2RofBasenAttachmentpoints([0 0;10 0; 4 -5; 9 5]); [l1,l2,r,eb]=L1L2RofBasenAttachmentpoints([0 0;10 0; 4 -5; 9 5]) % % See also: CPLfourbarlinkage2, fourBarLinkageplotanimui, % L1L2RofBasenAttachmentpoints % % % % Copyright 2019 Tim C. Lueth |
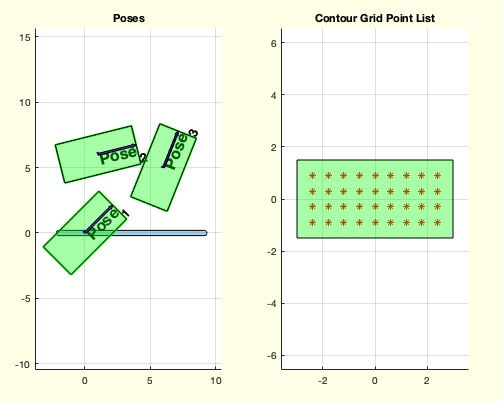
checkfourbar3Poseattachpermutation(PS,CPLE,GPL,m,exactCPL)- returns only subset of permutations of grid points to achieve a real fourbar linkage solution |
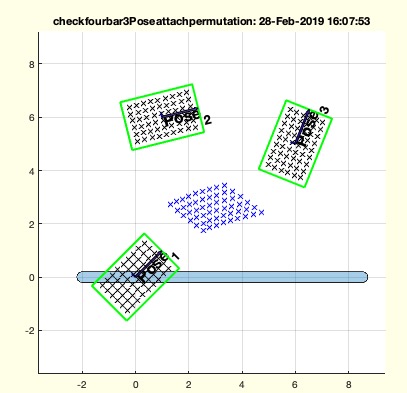 | % checkfourbar3Poseattachpermutation(PS,CPLE,GPL,m,exactCPL) - returns only subset of permutations of grid points to achieve a real fourbar linkage solution % (by Tim Lueth, VLFL-Lib, 2019-FEB-27 as class: KINEMATICS AND FRAMES) % % currently slow since not optimized fnctn % This fnctn can be used without calling center3Poseeffektorgrid before % since it has almost the same input parameters % Adds the Fields % GPL - if not existing already % GAL - List of Solutions % A0L - List of crank base point wrt to GAL % B0L - List of swing base point wrt to GAL % % %% CONVERT GAL TO FOURBARS A0 B0 A1 B1 GPLA GPLB % A0=PS.A0L(k,:); B0=PS.B0L(k,:); % GPLA=PS.GPL(PS.GAL(k,1),:); GPLB=PS.GPL(PS.GAL(k,2),:); % T=TofPose(PS); A1=PLtransT(GPLA,T(:,:,1)); B1=PLtransT(GPLB,T(:,:,1)); % (Status of: 2021-12-08) % % Introduced first in SolidGeometry 4.5 % % See also: isincirclesegment, center3Poseeffektorgrid, % Posefourbarplotcouplercurve, checkfourbar2Poseattachpermutation, % checkfourbar1Poseattachpermutation, Posetransui % % [PS,C,R,P1,P2,P3,ei,mi]=checkfourbar3Poseattachpermutation(PS,[CPLE,GPL % ,m,exactCPL]) % === INPUT PARAMETERS === % PS: Pose; only PS.A and PS.B are used % CPLE: optional CPLE or size of square % GPL: Grid point list relative to origin or resolutin % m: CPLE buffer buffer size or exact CPL % exactCPL: false==outer boundary; true==exact CPLE; default is false % === OUTPUT RESULTS ====== % PS: [i j ellbow segment startangle endangle] % C: Grid point list relative to origin size of GPL % R: Radius of circle for each grid point size of GPL % P1: Grid point list relative to pose 1 size of GPL % P2: Grid point list relative to pose 2 size of GPL % P3: Grid point list relative to pose 3 size of GPL % ei: index of Grid points with solution % % EXAMPLE: % PS=Posesample(7); PS.CPLE=PLsquare(6,3); % [GPL,ki]=GPLauxgridpointsCL(PS.CPLE,0.5,.5); GPL=GPL(ki==1,:); % checkfourbar3Poseattachpermutation(PS,'',GPL) % checkfourbar3Poseattachpermutation(Posesample(7)) % checkfourbar3Poseattachpermutation(Posesample(7),4) % checkfourbar3Poseattachpermutation(Posesample(7),4,5) % % % See also: isincirclesegment, center3Poseeffektorgrid, % Posefourbarplotcouplercurve, checkfourbar2Poseattachpermutation, % checkfourbar1Poseattachpermutation, Posetransui % % % Copyright 2019-2021 Tim C. Lueth |
exp_2019_02_27_call_by_reference (A)- Experiment to show how to implement call by reference in matlab |
 | % exp_2019_02_27_call_by_reference (A) - Experiment to show how to implement call by reference in matlab % (by Tim Lueth, VLFL-Lib, 2019-FEB-27 as class: LANGUAGE PROCEDURES) % % Introduced first in SolidGeometry 4.5 % % See also: assignin, inputname, dbstack, iscalledbycmdline % % exp_2019_02_27_call_by_reference(A) % === INPUT PARAMETERS === % A: Input Parameter that will be changed into a string by this fnctn % % EXAMPLE: % A=123; exp_2019_02_27_call_by_reference(A); A % % See also: assignin, inputname, dbstack, iscalledbycmdline % % % Copyright 2019 Tim C. Lueth |
center3Poseeffektorgrid(A,B,CPLE,GPL,m,exactCPL)- returns the rotations centers for grid points of the effector contour |
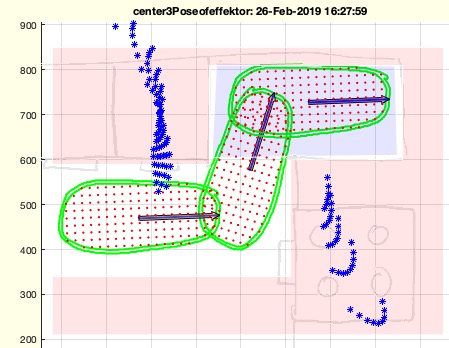 | % center3Poseeffektorgrid(A,B,CPLE,GPL,m,exactCPL) - returns the rotations centers for grid points of the effector contour % (by Tim Lueth, VLFL-Lib, 2019-FEB-26 as class: KINEMATICS AND FRAMES) % % if called without results it calculates the possible solutions. % For real fourbar linkage design task, % it makes more sense to call 'checkfourbar3Poseattachpermutation' % directly which has almost the same input parameters % (Status of: 2019-03-02) % % Introduced first in SolidGeometry 4.5 % % See also: center3Pose, center3Poseui, checkfourbar3Poseattachpermutation % % [GPL,S,P1,P2,P3]=center3Poseeffektorgrid(A,B,[CPLE,GPL,m,exactCPL]) % === INPUT PARAMETERS === % A: Start point or Pose % B: End Point or Pose % CPLE: Optional contour or size of squared box % GPL: number of point (integer) or distance (if not integer) % m: distance to outer contour; default is 0 % exactCPL: true if no outer boundary but exact CPLE is used % === OUTPUT RESULTS ====== % GPL: Center Point and Radius % S: Grid Coordinates relative to CPLE % P1: Grid Coordinates relative to Pose 1 % P2: Grid Coordinates relative to Pose 2 % P3: Grid Coordinates relative to Pose 3 % % EXAMPLE: % fname=loadweb('Posebasecabinet.APD',true); PS=PosereadAPD(fname) % center3Poseeffektorgrid(PS); % % center3Poseeffektorgrid(Posesample(7)); % center3Poseeffektorgrid(Posesample(11)); % % % See also: center3Pose, center3Poseui, checkfourbar3Poseattachpermutation % % % Copyright 2019 Tim C. Lueth |
KDWofXY(A1,B1,TP)- returns two line distances of points and an angle and a displacement of a straigt line line from two points |
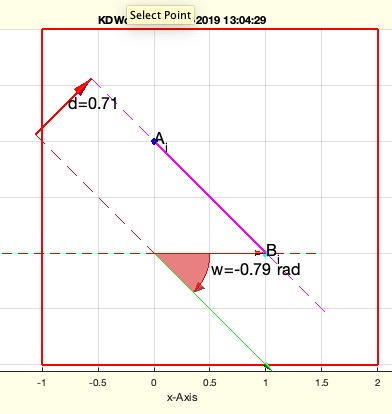 | % KDWofXY(A1,B1,TP) - returns two line distances of points and an angle and a displacement of a straigt line line from two points % (by Tim Lueth, VLFL-Lib, 2019-FEB-26 as class: ANALYTICAL GEOMETRY) % % This fnctn calculates wrt to the origin the values of K, D, W from two % attachment points % Since the original concept for 3 Pose syntheses of fourbar linkages by % Tim Lueth was based on poses, and attachment point were introduced % later, it was necessary to convert the concept of pose shift/ % displacement to the concept of attachment points (Status of: 2021-12-04) % % Introduced first in SolidGeometry 4.5 % % See also: KDWPosevariation, KDWofPoseattachments, % TofPoseattachmentpoints, B1ofA1 % % [K,D,W]=KDWofXY(A1,B1,[TP]) % === INPUT PARAMETERS === % A1: Point of attachment point A1 wrt to origin % B1: Point of attachment point B1 wrt to origin % TP: Optional Pose Coordinate System wrt to Origin; default is origin; % eye(4); % === OUTPUT RESULTS ====== % K: distance of A1 and B1 along the origin of a straight line % D: displacement of the line wrt to the origin % W: turning angle of the line relative to x-axis % % EXAMPLE: % KDWofXY([1 0],[0 1]); [K,D,W]=KDWofXY([1 0],[0 1]) % KDWofXY([0 1],[1 0]); [K,D,W]=KDWofXY([0 1],[1 0]) % KDWofXY([1 0],[0 1],TofR(rot(pi/2),[0 0])) % % % See also: KDWPosevariation, KDWofPoseattachments, % TofPoseattachmentpoints, B1ofA1 % % % Copyright 2019-2021 Tim C. Lueth |
stripfields(S,Fieldnames)- removes a list of fields from a struct |
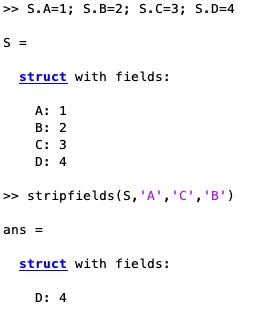 | % stripfields(S,Fieldnames) - removes a list of fields from a struct % (by Tim Lueth, VLFL-Lib, 2019-FEB-25 as class: LANGUAGE PROCEDURES) % % Introduced first in SolidGeometry 4.5 % % See also: retainfields, rmfield, isfield % % S=stripfields(S,[Fieldnames]) % === INPUT PARAMETERS === % S: struct % Fieldnames: List of field names as varargin % === OUTPUT RESULTS ====== % S: struct with removed fields % % EXAMPLE: % S.A=1; S.B=2; S.C=3; S.D=4 % stripfields(S,'A','C','B') % retainfields(S,'A','C','B') % % See also: retainfields, rmfield, isfield % % % Copyright 2019 Tim C. Lueth |
KDWofPoseattachments(A,B,A1,B1)- returns the values for K, D, and W for given attachment points |
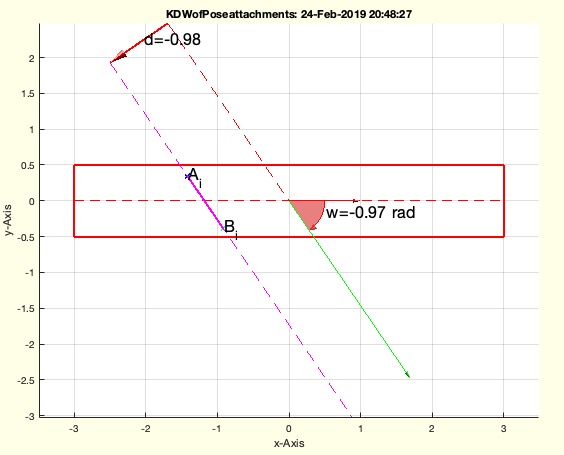 | % KDWofPoseattachments(A,B,A1,B1) - returns the values for K, D, and W for given attachment points % (by Tim Lueth, VLFL-Lib, 2019-FEB-24 as class: KINEMATICS AND FRAMES) % % PS.A1 has the format (x y Pose#) % PS.B1 has the format (x y Pose#) % (Status of: 2021-12-04) % % Introduced first in SolidGeometry 4.5 % % See also: KDWPosevariation, KDWofXY, TofPoseattachmentpoints, B1ofA1 % % [K,D,W,err]=KDWofPoseattachments([A,B,A1,B1]) % === INPUT PARAMETERS === % A: Pose including PS.A, PS.B, PS.A1, PS.B1 % B: optional Pose Values for End Points % A1: Attachment Point for A1 [X Y Pose#] % B1: Attachment Point for B1 [X Y Pose#] % === OUTPUT RESULTS ====== % K: [ka kb] on pose line as values relativ distance to pose starting % point % D: displacement parallel to pose orientation % W: turning angle BEFORE displacement realtive to origin % err: error value % % EXAMPLE: % PS=Posesample(7); PS.A1=[0 1 1]; PS.B1=[2 1 1]; % KDWofPoseattachments(PS); [K,D,W,err]=KDWofPoseattachments(PS) % % % See also: KDWPosevariation, KDWofXY, TofPoseattachmentpoints, B1ofA1 % % % Copyright 2019-2021 Tim C. Lueth |
fourBarLinkageanimate(A0,B0,A1,B1,TP,CPLE)- animates a fourbarlinkage based on 4 Points, a Frame, and a Contour |
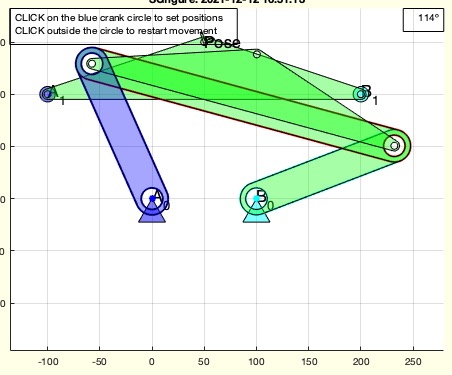 | % fourBarLinkageanimate(A0,B0,A1,B1,TP,CPLE) - animates a fourbarlinkage based on 4 Points, a Frame, and a Contour % (by Tim Lueth, VLFL-Lib, 2019-FEB-23 as class: KINEMATICS AND FRAMES) % % new programmed for SG-Lib 5.1. In contrast to fourBarLinkageplotanim % this fnctn works with A0, B0, A1, B1, and an optinal frame and CPLE % (Status of: 2021-12-15) % % Introduced first in SolidGeometry 4.5 % % See also: fourBarplotPoints, CPLfourbarcontour, CPLofA1B1P, % fourBarLinkageplotanim, fourBarLinkageplotanimui % % h=fourBarLinkageanimate(A0,B0,A1,B1,[TP,CPLE]) % === INPUT PARAMETERS === % A0: Base Point A0 on ground link; or CPL [A0;B0;B1;A1] % B0: Base Point B0 on ground link % A1: Attachment Point A1 crank-coupler % B1: Attachment Point B1 follower-coupler % TP: Frame of Pose % CPLE: Contour relative to Pose % === OUTPUT RESULTS ====== % h: handle to graphics objects % % EXAMPLE: % SGfigure; fourBarLinkageanimate([0 0],[ 100 0], [-100 100], [200 100]) % fourBarLinkageanimate([0 0],[ 100 0], [-100 100], [200 100],TofP([50 150])); % SGfigure; fourBarLinkageanimate([0 0],[ 100 0], [-100 100], [200 100],TofR(rot(pi/10),[50 150])); % SGfigure; fourBarLinkageanimate([0 0],[ 100 0], [0 100], [101 100],TofR(rot(pi/10),[50 150])); % SGfigure; fourBarLinkageanimate([6 79],[2 130],[17 64], [60 134],[17 64-35]); % Mercader % % See also: fourBarplotPoints, CPLfourbarcontour, CPLofA1B1P, % fourBarLinkageplotanim, fourBarLinkageplotanimui % % % Copyright 2019-2022 Tim C. Lueth |
mirroringatline(P1,ev,p)- mirrors a point at a straight line in 2D |
 | % mirroringatline(P1,ev,p) - mirrors a point at a straight line in 2D % (by Tim Lueth, VLFL-Lib, 2019-FEB-22 as class: ANALYTICAL GEOMETRY) % % Should be renamed into PLmirroratline (Status of: 2019-03-16) % % Introduced first in SolidGeometry 4.5 % % See also: PLcross2Lines, PLcrossCPLline, mirroringatline3D, % mirroringatline2D % % [mp,do,cp,ov]=mirroringatline(P1,ev,p) % === INPUT PARAMETERS === % P1: Point on line % ev: direction vector % p: point to mirror % === OUTPUT RESULTS ====== % mp: mirror point % do: distance to straight line (wrt to ev) % cp: crossing point on line % ov: orthogonal vector to straight line from p to cp % % EXAMPLE: % mirroringatline([0 0],+[-1 -6],[1 1]) % % See also: PLcross2Lines, PLcrossCPLline, mirroringatline3D, % mirroringatline2D % % % Copyright 2019 Tim C. Lueth |
poletriangle3Pose(A,B)- calculates the edges of the pole triangle of three poses |
 | % poletriangle3Pose(A,B) - calculates the edges of the pole triangle of three poses % (by Tim Lueth, VLFL-Lib, 2019-FEB-22 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: center3Pose % % [PL,A123,A0,R]=poletriangle3Pose(A,B) % === INPUT PARAMETERS === % A: Point List for A; or Pose struct % B: Point List for B if A is not pose struct % === OUTPUT RESULTS ====== % PL: Point List [P12;P23;P31] % A123: Zero Point % A0: Center of A0 % R: Radius (Distance A1-A0, A2-A0, A3-A0) % % EXAMPLE: % poletriangle3Pose(Posesample(7)) % PS=Posesample(7); poletriangle3Pose(PS.A,PS.B) % % See also: center3Pose % % % Copyright 2019 Tim C. Lueth |
pastego (h,hgca)- inserts graphics objects into the current axis gca |
 | % pastego (h,hgca) - inserts graphics objects into the current axis gca % (by Tim Lueth, VLFL-Lib, 2019-FEB-22 as class: USER INTERFACE) % % copy and paste for graphics objects by introducing a figure CLIPBOARD % (Status of: 2021-12-05) % % Introduced first in SolidGeometry 4.5 % % See also: findobj, copyobj, copygo, copyfig, snapplot, PRplot, % copyplot, snapnow, drawnow, smbdrawnow, pushgcf, popgcf % % pastego([h,hgca]) % === INPUT PARAMETERS === % h: object handles to insert % hgca: axis to insert and list of tyes % % EXAMPLE: % figure(111); cla; CPLplotasPS(PLcircle(10)); CPLplot(PLcircle(20),'b-'); textVL(PLcircle(15)); SGplot(SGbox(5)); % h=copygo('line','text') % figure(111); h=copygo('line','text') % figure(123); cla; pastego(h); % % % See also: findobj, copyobj, copygo, copyfig, snapplot, PRplot, % copyplot, snapnow, drawnow, smbdrawnow, pushgcf, popgcf % % % Copyright 2019-2021 Tim C. Lueth |
copygo(ca)- copies graphics objects of a type list from an axis similar to findobj and copyobj |
 | % copygo(ca) - copies graphics objects of a type list from an axis similar to findobj and copyobj % (by Tim Lueth, VLFL-Lib, 2019-FEB-22 as class: USER INTERFACE) % % copy and paste for graphics objects by introducing a figure CLIPBOARD % (Status of: 2021-12-05) % % Introduced first in SolidGeometry 4.5 % % See also: findobj, copyobj, pastego, copyfig, snapplot, PRplot, % copyplot, snapnow, drawnow, smbdrawnow, pushgcf, popgcf % % h=copygo([ca]) % === INPUT PARAMETERS === % ca: axis to copy from % === OUTPUT RESULTS ====== % h: handle to graphics objects % % EXAMPLE: % figure(111); cla; CPLplotasPS(PLcircle(10)); CPLplot(PLcircle(20),'b-'); textVL(PLcircle(15)); SGplot(SGbox(5)); % h=copygo('line','text') % figure(111); h=copygo('line','text') % figure(123); cla; pastego(h); % % % See also: findobj, copyobj, pastego, copyfig, snapplot, PRplot, % copyplot, snapnow, drawnow, smbdrawnow, pushgcf, popgcf % % % Copyright 2019-2021 Tim C. Lueth |
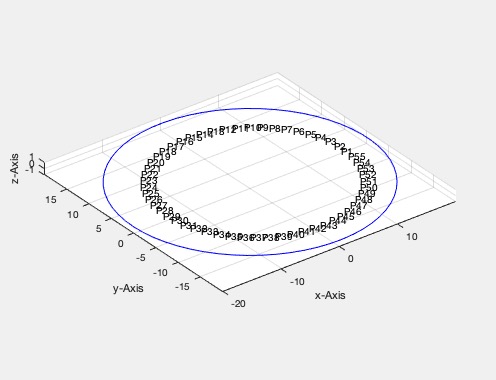
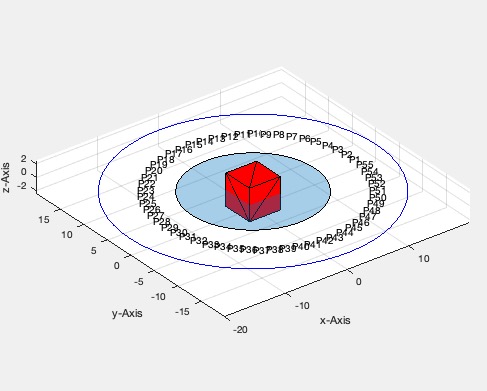
KDWPoseinsideCPL(CPL,d,m)- creates a grid point list and the values for KDW |
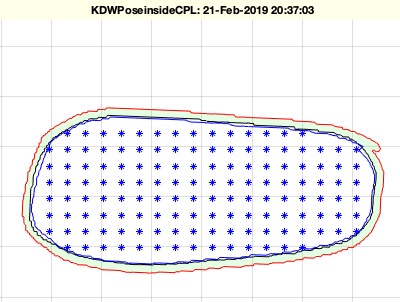 | % KDWPoseinsideCPL(CPL,d,m) - creates a grid point list and the values for KDW % (by Tim Lueth, VLFL-Lib, 2019-FEB-21 as class: KINEMATICS AND FRAMES) % % may be better use checkfourbar3Poseattachpermutation directly % very slow fnctn (Status of: 2019-02-22) % % Introduced first in SolidGeometry 4.5 % % See also: KDWPosevariation % % [KDW,GPL]=KDWPoseinsideCPL(CPL,[d,m]) % === INPUT PARAMETERS === % CPL: Effektor Contour of a Pose % d: distance between the grid points; default is s/20 % m: either buffer around CPL or explicit contour for grid area % === OUTPUT RESULTS ====== % KDW: [K D W] for GPL % GPL: GPL inside contour % % EXAMPLE: % fname=loadweb('Posebasecabinet.APD',true); PS=PosereadAPD(fname) % KDWPoseinsideCPL(PS,10) % % See also: KDWPosevariation % % % Copyright 2019 Tim C. Lueth |
Poseplotspace(PS);- plot the different contours of a pose in different colors |
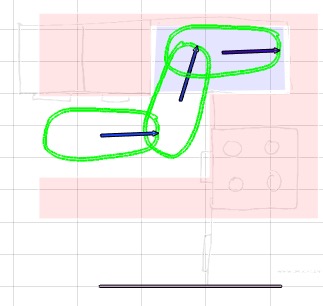 | % Poseplotspace(PS); - plot the different contours of a pose in different colors % (by Tim Lueth, VLFL-Lib, 2019-FEB-20 as class: KINEMATICS AND FRAMES) % % CPLM - BLUE Mounting Area for base points in % CPLB - BLACK - Background contours to understand the szene % CPLW - RED - Work Space or Prohibited Area depending (Status of: % 2019-02-20) % % Introduced first in SolidGeometry 4.5 % % See also: Poseplot, Poseui, Poseofimageui % % h=Poseplotspace(PS); % === INPUT PARAMETERS === % PS): Pose struct containing CPLM, CPLW, CPLB % === OUTPUT RESULTS ====== % h: handle to graphics objects % % EXAMPLE: loadweb ('Posebasecabinet.mat') % SGfigure; Poseplotspace(PS); % SGfigure; Poseplotspace(PS); Poseplot(PS); % % See also: Poseplot, Poseui, Poseofimageui % % % Copyright 2019 Tim C. Lueth |
elem2cols(elem)- converts elements of a list into an array |
 | % elem2cols(elem) - converts elements of a list into an array % (by Tim Lueth, VLFL-Lib, 2019-FEB-16 as class: AUXILIARY PROCEDURES) % % ======================================================================= % OBSOLETE (2022-04-30) - USE 'array2cell' INSTEAD % ======================================================================= % % check also array2cell(a.folder) % Some fnctns such as 'findobj' return a cell list of objects as % separated results. Accessing structured properties/methods of those % objects is possible by % a) using the "get command' which returns a cell list for instance % "get(h,'Shape')" % b) use the property name directly similar to a struct, or instance % "h.Shape" % In the second case (b) the property methods is called repeated times % for each element of the object list which returns several individual % results. % This fnctn converts the results list into an array of the same class % type % (Status of: 2022-04-30) % % Introduced first in SolidGeometry 4.5 % % See also: [ array2cell ] ; squeeze, elem2rows, get, elem2array, % arrayof, cell2class, class2cell, array2cell % % vec=elem2cols([elem]) % === INPUT PARAMETERS === % elem: results list of several elements % === OUTPUT RESULTS ====== % vec: array of same type as elem{1} filled with elem{:} % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); h=findobj(gca,'type','polygon') % h.Shape % creates 4 results % get(h,'Shape') % creates a cell list with 4 entries % elem2cols(h.Shape) % converts the 4 results in an class type array with 4 elements % % See also: [ array2cell ] ; squeeze, elem2rows, get, elem2array, % arrayof, cell2class, class2cell, array2cell % % % Copyright 2019-2022 Tim C. Lueth |
elem2rows(elem)- converts elements of a list into an array |
 | % elem2rows(elem) - converts elements of a list into an array % (by Tim Lueth, VLFL-Lib, 2019-FEB-16 as class: AUXILIARY PROCEDURES) % % ======================================================================= % OBSOLETE (2022-04-30) - USE 'array2cell' INSTEAD % ======================================================================= % % check also array2cell(a.folder) % Some fnctns such as 'findobj' return a cell list of objects as % separated results. Accessing structured properties/methods of those % objects is possible by % a) using the "get command' which returns a cell list for instance % "get(h,'Shape')" % b) use the property name directly similar to a struct, or instance % "h.Shape" % In the second case (b) the property methods is called repeated times % for each element of the object list which returns several individual % results. % This fnctn converts the results list into an array of the same class % type % (Status of: 2022-04-30) % % Introduced first in SolidGeometry 4.5 % % See also: [ array2cell ] ; squeeze, elem2cols, get, elem2array, % arrayof, cell2class, class2cell, array2cell % % vec=elem2rows([elem]) % === INPUT PARAMETERS === % elem: results list of several elements % === OUTPUT RESULTS ====== % vec: array of same type as elem{1} filled with elem{:} % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); h=findobj(gca,'type','polygon') % h.Shape % creates 4 results % get(h,'Shape') % creates a cell list with 4 entries % elem2array(h.Shape) % converts the 4 results in an class type array with 4 elements % cell2class(get(h,'Shape')) % returns the same result as elem2arry from the get result % % See also: [ array2cell ] ; squeeze, elem2cols, get, elem2array, % arrayof, cell2class, class2cell, array2cell % % % Copyright 2019-2022 Tim C. Lueth |
diffangle2D(NL1,NL2,normfirst)- returns the angle between two vectors including sign |
 | % diffangle2D(NL1,NL2,normfirst) - returns the angle between two vectors including sign % (by Tim Lueth, VLFL-Lib, 2019-FEB-16 as class: ANALYTICAL GEOMETRY) % % ======================================================================= % OBSOLETE (2019-02-25) - USE 'acos2' INSTEAD % ======================================================================= % % may be not the first implementation % exactly the same as acos2 (Status of: 2019-02-24) % % Introduced first in SolidGeometry 4.5 % % See also: [ acos2 ] ; diffangle % % [w,a]=diffangle2D(NL1,NL2,[normfirst]) % === INPUT PARAMETERS === % NL1: Vector list 1 % NL2: Vector list 1 % normfirst: default is true; % === OUTPUT RESULTS ====== % w: result from -pi .. + pi % a: area between both vectors % % EXAMPLE: % a1=acos([0 1]*[1 0]'), a2=acos([1 0]*[0 01]'), diffangle2D([0 1],[1 0]), diffangle2D([1 0],[0 1]) % tic; diffangle2D(rand(10,2),rand(10,2)), toc % % See also: [ acos2 ] ; diffangle % % % Copyright 2019 Tim C. Lueth |
acos2(NL1,NL2,normfirst)- 2D fnct: returns the angle between two vectors including sign |
 | % acos2(NL1,NL2,normfirst) - 2D fnct: returns the angle between two vectors including sign % (by Tim Lueth, VLFL-Lib, 2019-FEB-16 as class: ANALYTICAL GEOMETRY) % % may be not the first implementation - works only in 2D % Similar to atan2, this fnctn returns angles between -pi .. + pi % in contrast to acos, acos2 return for two vectors or vector list with 2 % Coordinates % the angle difference but uses a sign to show right hand (pos) or left % hand (neg) (Status of: 2019-02-25) % % Introduced first in SolidGeometry 4.5 % % See also: diffangle % % [w,a]=acos2(NL1,NL2,[normfirst]) % === INPUT PARAMETERS === % NL1: Vector list 1 % NL2: Vector list 1 % normfirst: default is true; % === OUTPUT RESULTS ====== % w: result from -pi .. + pi % a: area between both vectors % % EXAMPLE: % a1=acos([0 1]*[1 0]'), a2=acos([1 0]*[0 01]'), acos2([0 1],[1 0]), acos2([1 0],[0 1]) % tic; acos2(rand(10,2),rand(10,2)), toc % % See also: diffangle % % % Copyright 2019-2020 Tim C. Lueth |
select2d(styp)- interactive drawing of a square and return of the overlapping elements |
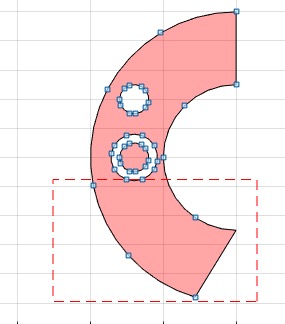 | % select2d(styp) - interactive drawing of a square and return of the overlapping elements % (by Tim Lueth, VLFL-Lib, 2019-FEB-16 as class: USER INTERFACE) % % It is an advanced version of PLsquareui % (Status of: 2019-02-16) % % Introduced first in SolidGeometry 4.5 % % See also: PLsquareui, select3d % % [CPL,hpol,hsel]=select2d([styp]) % === INPUT PARAMETERS === % styp: 'polygon' or 'line' % === OUTPUT RESULTS ====== % CPL: CPL of the square % hpol: handle to overlapped and selected polygons % hsel: handle to overlapped and selected lines % % EXAMPLE: SGfigure; CPLplot(CPLsample(29),'b-'); CPLplot(CPLsample(10),'g-'); CPSplot(PLcircle(4)); CPSplot(PLcircle(4)+[25 0],'b'); % [a,b,c]=select2d('line'); pause(1); set(c,'Selected','off'); % [a,b,c]=select2d('poly'); pause(1); set(b,'Selected','off'); % % See also: PLsquareui, select3d % % % Copyright 2019 Tim C. Lueth |
CPSofgcalines(h,si)- converts all or selected lines graphcis objects into CPS structs using a line thickness |
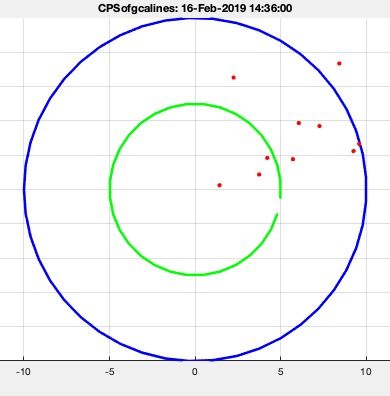 | % CPSofgcalines(h,si) - converts all or selected lines graphcis objects into CPS structs using a line thickness % (by Tim Lueth, VLFL-Lib, 2019-FEB-16 as class: CLOSED POLYGON LISTS) % % Supports points, open lines and closed lines (Status of: 2019-02-16) % % Introduced first in SolidGeometry 4.5 % % See also: CPSofgca, CCPSofgcalines, PLplot, CPLplot % % CPS=CPSofgcalines([h,si]) % === INPUT PARAMETERS === % h: handle or gca % si: optional line thickness in mm such as 0.35, 0.5, .7mm % === OUTPUT RESULTS ====== % CPS: CPS struct with an array of ps % % EXAMPLE: % close all; % SGfigure; for i=1:10; PLplot(rand(1,2)*10); end; CPLplot(PLcircle(10),'b-'); PLplot(PLcircle(5),'g-'); % CPSofgcalines % CPSofgcalines(.3) % % See also: CPSofgca, CCPSofgcalines, PLplot, CPLplot % % % Copyright 2019 Tim C. Lueth |
PLsquareui()- allows to draw interactively a square in the current graphics area |
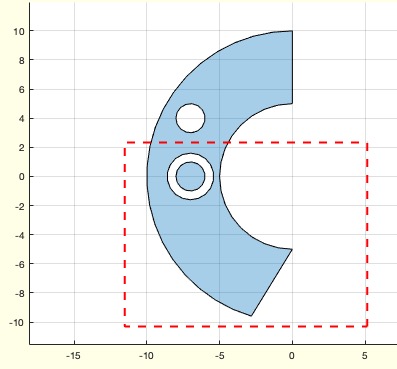 | % PLsquareui() - allows to draw interactively a square in the current graphics area % (by Tim Lueth, VLFL-Lib, 2019-FEB-15 as class: USER INTERFACE) % % Introduced first in SolidGeometry 4.5 % % See also: select3D, select2D, VLui, CPSlineui, CPLui, CPSui, PLui, % PLcircleui, VLFLui, SGui, CPLsplitui, Poseofimageui, Poseui, SGTui % % CPL=PLsquareui([]) % === OUTPUT RESULTS ====== % CPL: PL of a square % % EXAMPLE: % SGfigure; CPSplot(CPLsample(29)); PL=PLsquareui; CPLplot(PL,'r--',2); % % See also: select3D, select2D, VLui, CPSlineui, CPLui, CPSui, PLui, % PLcircleui, VLFLui, SGui, CPLsplitui, Poseofimageui, Poseui, SGTui % % % Copyright 2019 Tim C. Lueth |
textCPS(CPS,c,s,nt,lb)- writes text descriptors to CLPS |
 | % textCPS(CPS,c,s,nt,lb) - writes text descriptors to CLPS % (by Tim Lueth, VLFL-Lib, 2019-FEB-15 as class: VISUALIZATION) % % Introduced first in SolidGeometry 4.5 % % See also: textT, textP, textVL, textCVL, textVLFL, VLFLfaceNormalplot, % textVL % % h=textCPS(CPS,[c,s,nt,lb]) % === INPUT PARAMETERS === % CPS: CPS % c: color % s: size % nt: selector % lb: text % === OUTPUT RESULTS ====== % h: handle to text % % EXAMPLE: % SGfigure; CPSplot(CPLsample(29)); CPS=CPSofgca; textCPS(CPS) % % See also: textT, textP, textVL, textCVL, textVLFL, VLFLfaceNormalplot, % textVL % % % Copyright 2019 Tim C. Lueth |
fprintfvec (fh,X,fs)- auxiliary fnct for writing ALL vector elements in ONE SINGLE row! |
 | % fprintfvec (fh,X,fs) - auxiliary fnct for writing ALL vector elements in ONE SINGLE row! % (by Tim Lueth, VLFL-Lib, 2019-FEB-15 as class: FILE HANDLING) % % Introduced first in SolidGeometry 4.5 % % See also: PosewriteAPD, fprintfvec2, str2codelines, sprintfvec % % fprintfvec([fh,X,fs]) % === INPUT PARAMETERS === % fh: file handle % X: vector % fs: num format; default is '%d' % % EXAMPLE: % fprintfvec(1,[ 1 2 3 4 5 6 7 8; 1 2 3 4 5 6 7 8]*pi,'%.2f') % fprintfvec(1,[ 1 2 3 4 5 6 7 8; 1 2 3 4 5 6 7 8]*pi,'%d') % % See also: PosewriteAPD, fprintfvec2, str2codelines, sprintfvec % % % Copyright 2019-2020 Tim C. Lueth |
PosereadAPD(fname)- reads in a pose struct for syntheses tasks |
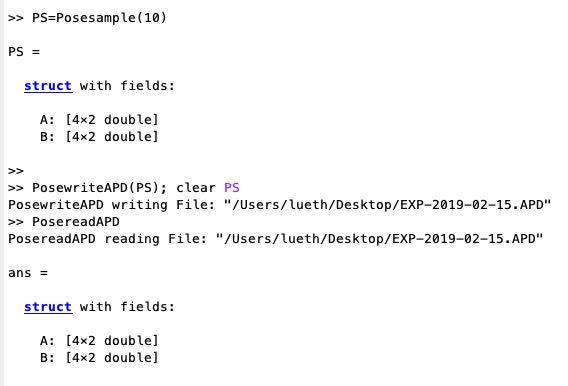 | % PosereadAPD(fname) - reads in a pose struct for syntheses tasks % (by Tim Lueth, VLFL-Lib, 2019-FEB-15 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: expname, Posesample, PosewriteAPD % % [PS,fname]=PosereadAPD([fname]) % === INPUT PARAMETERS === % fname: file name for read % === OUTPUT RESULTS ====== % PS: struct with poses content % fname: full file name used % % EXAMPLE: % PS=Posesample(10) % PosewriteAPD(PS); clear PS % PS=PosereadAPD % % % See also: expname, Posesample, PosewriteAPD % % % Copyright 2019 Tim C. Lueth |
PosewriteAPD(PS,fname)- writes a pose struct as ascii text file |
 | % PosewriteAPD(PS,fname) - writes a pose struct as ascii text file % (by Tim Lueth, VLFL-Lib, 2019-FEB-15 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: expname, Posesample, PosereadAPD % % [fullname]=PosewriteAPD(PS,[fname]) % === INPUT PARAMETERS === % PS: Pose % fname: filename default is expname % === OUTPUT RESULTS ====== % [fullname]: full file name for read % % EXAMPLE: % PS=Posesample(10) % PosewriteAPD(PS); uiopen(desktopdir([expname '.APD']),1); % % See also: expname, Posesample, PosereadAPD % % % Copyright 2019 Tim C. Lueth |
CPSdiffarea(CPLA,CPLB)- return the norm difference between two polyshape areas by xor |
 | % CPSdiffarea(CPLA,CPLB) - return the norm difference between two polyshape areas by xor % (by Tim Lueth, VLFL-Lib, 2019-FEB-15 as class: CLOSED POLYGON LISTS) % % To analyze which ideal geometry fits best in CPLidealshape, CPSdiffarea % is used to calulate the difference of the areas (Status of: 2019-02-15) % % Introduced first in SolidGeometry 4.5 % % See also: CPLidealshape % % a=CPSdiffarea(CPLA,CPLB) % === INPUT PARAMETERS === % CPLA: Closed Polygon or Polyshape A % CPLB: Closed Polygon or Polyshape B % === OUTPUT RESULTS ====== % a: resulting area % % See also: CPLidealshape % % % Copyright 2019 Tim C. Lueth |
CPSremovearea(CPS,sline)- removes CPS/polyshape regions of small area |
 | % CPSremovearea(CPS,sline) - removes CPS/polyshape regions of small area % (by Tim Lueth, VLFL-Lib, 2019-FEB-15 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: CPLremstraightAmin, CPLremstraight, CPLremovearea, % imofimsketch % % [CPSN,CPRA]=CPSremovearea(CPS,[sline]) % === INPUT PARAMETERS === % CPS: Original CPS/polyhsape % sline: minimal length (not area) % === OUTPUT RESULTS ====== % CPSN: remaining polyshapes % CPRA: Removed polyshapes % % EXAMPLE: % I=imofimsketch(imreadlastchanged); CPS=polyshape(CPLofimage(I)); cla; plot(CPS) % CPSremovearea(CPS) % % See also: CPLremstraightAmin, CPLremstraight, CPLremovearea, % imofimsketch % % % Copyright 2019 Tim C. Lueth |
CPSofpolygon(h)- returns a struct called Colored PolyShape (CPS) similar to a polygon array object |
 | % CPSofpolygon(h) - returns a struct called Colored PolyShape (CPS) similar to a polygon array object % (by Tim Lueth, VLFL-Lib, 2019-FEB-15 as class: CLOSED POLYGON LISTS) % % Matlab introduced new classes polygon as graphics object and polyshape % as geometric object. % Nevertheless, SG-Lib usees either CPL, polyshapes or colored polyshapes % that consist % ps polyshape array % fc facecolor array % fa facealpha array % ec edgecolor array % similar to poygon (Status of: 2019-02-16) % % Introduced first in SolidGeometry 4.5 % % See also: CPLplotasPS, CPSofgca % % CPS=CPSofpolygon(h) % === INPUT PARAMETERS === % h: handle to polygon % === OUTPUT RESULTS ====== % CPS: struct with ps, fc, fa, ec % % % EXAMPLE: % SGfigure; CPLplotasPS(PLcircle(10),'','FaceColor','g','FaceAlpha',1); % shg; CPSofgca % % See also: CPLplotasPS, CPSofgca % % % Copyright 2019 Tim C. Lueth |
fourBarLinkageplotanimui(l1,l2,r,A0,tmove,elup,transl,ka)- plots and animates the movement interactively of a fourbar linkage |
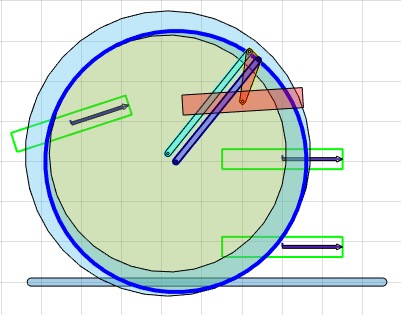 | % fourBarLinkageplotanimui(l1,l2,r,A0,tmove,elup,transl,ka) - plots and animates the movement interactively of a fourbar linkage % (by Tim Lueth, VLFL-Lib, 2019-FEB-14 as class: VISUALIZATION) % % THERE ARE MORE THAN 8 PARAMETER! % 9th parameter is CPLE Effector Contour, CPLE must be in TPA1B1 % 10th parameter 'angle' is an optional with [wmin wmax] % Important fnctn for simulating the movement of forbarlinkages.There is % a ninth parameter, the CPL-shape of the tool attached to the coupler % position at [ka w d]. By default this CPL is a L-shaped ccordinate % system. % (Status of: 2021-12-05) % % Introduced first in SolidGeometry 4.5 % % See also: CPLfourbarlinkage, fourBarLinkageplotanim, % fourBarLinkageplot, CPLfourbarlinkage2 % % h=fourBarLinkageplotanimui([l1,l2,r,A0,tmove,elup,transl,ka]) % === INPUT PARAMETERS === % l1: length of link1 at Base B0 % l2: length of link2 / coupler % r: radius of crank at Base A0 % A0: distance, A0-B0, Position of A0 or List [A0;B0] % tmove: time to animate; default is 2 sec % elup: elbow up (true) elbow down (false); default is false; % transl: transparancey for swept volume (0..1); default is 0; % ka: either ka or[ka w] or [ka w disp] % === PROPERTY NAMES ===== % 'alpha' : optional angle limitation [wmin wmax] % === OUTPUT RESULTS ====== % h: handle to last graphics objects % % EXAMPLE: % axis([-100 100 -100 100]); h=fourBarLinkageplotanim (50,70,50,[30 30; 35 35],10,true); shg % axis([-100 100 -100 100]); h=fourBarLinkageplotanim (50,70,50,[30 30; 35 35],10,false); shg % SGfigure; fourBarLinkageplotanimui(70,40,40,[0 0; 0 110]); % % See also: CPLfourbarlinkage, fourBarLinkageplotanim, % fourBarLinkageplot, CPLfourbarlinkage2 % % % Copyright 2019-2021 Tim C. Lueth |
updategco(h,PL)- updates an graphics object with new coordiantes |
 | % updategco(h,PL) - updates an graphics object with new coordiantes % (by Tim Lueth, VLFL-Lib, 2019-FEB-14 as class: VISUALIZATION) % % used in fourBarLinkageplotanimui (Status of: 2019-02-15) % % Introduced first in SolidGeometry 4.5 % % See also: fourBarLinkageplotanimui % % updategco([h,PL]) % === INPUT PARAMETERS === % h: handle to graphics object % PL: new point list % % EXAMPLE: % SGfigure; h=PLplot(PLcircle(10),'b--',4); updategco(h,PLsquare(4,5)); % % See also: fourBarLinkageplotanimui % % % Copyright 2019 Tim C. Lueth |
PLplotlineseg(PL,s,c,w,vec,a)- plots a line using PLplot in distance separated segments |
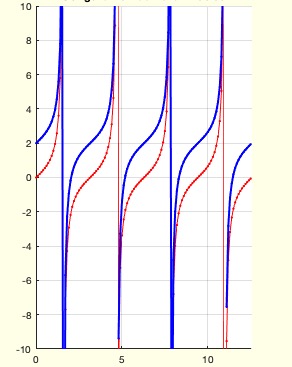 | % PLplotlineseg(PL,s,c,w,vec,a) - plots a line using PLplot in distance separated segments % (by Tim Lueth, VLFL-Lib, 2019-FEB-13 as class: USER INTERFACE) % % used to plot lines with poles in infitity (Status of: 2019-02-13) % % Introduced first in SolidGeometry 4.5 % % See also: VLELplots, CPLplot, PLplot, VLplot % % h=PLplotlineseg(PL,[s,c,w,vec,a]) % === INPUT PARAMETERS === % PL: Point list % s: segment number or distances % c: color % w: line % vec: vector tip size % a: transparancy; default is 0; % === OUTPUT RESULTS ====== % h: handle % % EXAMPLE: % cla; PLplotlineseg(PL,2,'r*-'); axis tight % a=0:.1:4*pi; PL=[a' sin(a')]; SGfigure; PLplot(PL,'r.-'); PLplotlineseg(PL+[0 2],3,'b.-',2);shg % a=0:.1:4*pi; PL=[a' tan(a')]; SGfigure; PLplot(PL,'r.-'); PLplotlineseg(PL+[0 2],3,'b.-',2); axis([0 4*pi -10 10]); drawnow; % a=0:.01:4*pi; PL=[a' tan(a')]; figure;; PLplotlineseg(PL+[0 2],40.1,'b.-',2); drawnow; view(0,90); % % See also: VLELplots, CPLplot, PLplot, VLplot % % % Copyright 2019 Tim C. Lueth |
KDWPosevariation(PS,nk,nd,dw)- returns three variant lists for center3Pose as a first recommendation |
 | % KDWPosevariation(PS,nk,nd,dw) - returns three variant lists for center3Pose as a first recommendation % (by Tim Lueth, VLFL-Lib, 2019-FEB-13 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: center3Pose % % [K,D,W]=KDWPosevariation(PS,[nk,nd,dw]) % === INPUT PARAMETERS === % PS: Pose to be searched using center3Pose % nk: number if k variants; default is % nd: number of d variants; default is 5 % dw: degree resolution ; default is 15 % === OUTPUT RESULTS ====== % K: List for k values; default are 40. % D: List for d values; default are 5 % W: List for values; ; default are 24 for 15 degree % % EXAMPLE: % PS=Posesample(7); % [K,D,W]=KDWPosevariation(PS); center3Pose(PS.A,PS.B,K,D,W);S=ans; whos S % hideingca('text'); hideingca('polygon'); % % See also: center3Pose % % % Copyright 2019 Tim C. Lueth |
hideingca(gotype,hide);- simply hide (set visibiliy to off) or delete graphics objects of a specific type |
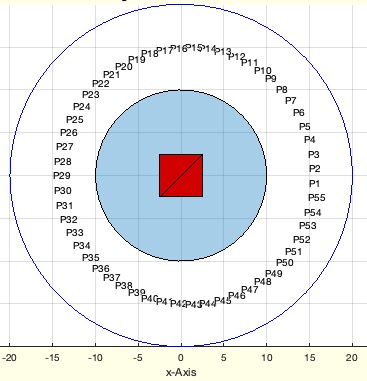 | % hideingca(gotype,hide); - simply hide (set visibiliy to off) or delete graphics objects of a specific type % (by Tim Lueth, Video-Lib, 2019-FEB-13 as class: USER INTERFACE) % % used in SGfigure since SG 4.5 to toogle the view of patches, lines, % text and polygons (Status of: 2019-02-13) % % Introduced first in SolidGeometry 4.5 % % See also: SGfigure, findingca % % h=hideingca(gotype,[hide]); % === INPUT PARAMETERS === % gotype: type such as 'line', 'text','polygon' etc. % hide: 'hide', 'delete', 'clear' 'invisible', visible' etc. % === OUTPUT RESULTS ====== % h: handle to object % % EXAMPLE: % SGfigure; PLplot(PLcircle(100)); % shg; hideingca('line','invi');pause(.5); hideingca('line','visi'); % SGfigure; CPLplotasPS(PLcircle(10)); CPLplot(PLcircle(20),'b-'); textVL(PLcircle(15)); SGplot(SGbox(5)); % % See also: SGfigure, findingca % % % Copyright 2019 Tim C. Lueth |
BBofCPS(CPS)- returns the bounding box for a polyshape or CPS |
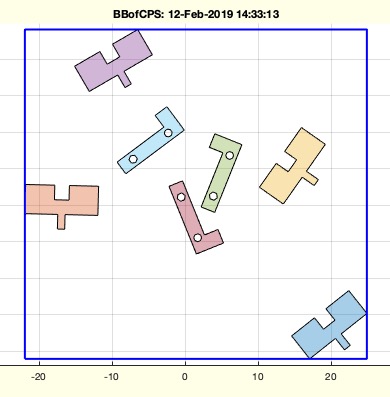 | % BBofCPS(CPS) - returns the bounding box for a polyshape or CPS % (by Tim Lueth, VLFL-Lib, 2019-FEB-12 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: CPLofBB, BBofVL, BBofSG, BBofCPL, BBofPS, BBofSGcutT % % bb=BBofCPS(CPS) % === INPUT PARAMETERS === % CPS: Colored polyshape struct or polyshape % === OUTPUT RESULTS ====== % bb: bounding box % % EXAMPLE: % ps=polyshape(PLcircle(10)), BBofCPS(ps) % % % See also: CPLofBB, BBofVL, BBofSG, BBofCPL, BBofPS, BBofSGcutT % % % Copyright 2019 Tim C. Lueth |
CPSsimilaritymap(CPS,tol)- converts an array of CPS or polyshapes into a cell list of similar CPS |
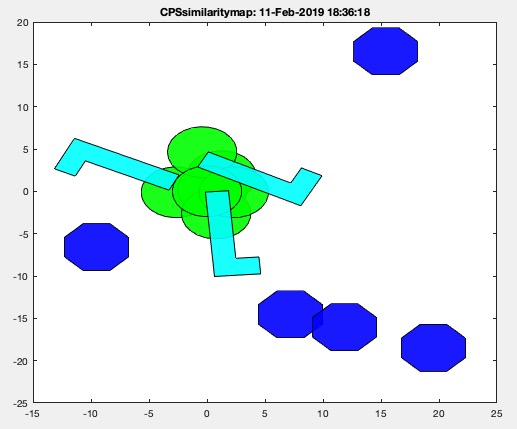 | % CPSsimilaritymap(CPS,tol) - converts an array of CPS or polyshapes into a cell list of similar CPS % (by Tim Lueth, VLFL-Lib, 2019-FEB-11 as class: CLOSED POLYGON LISTS) % % This is not a fast procedure; the more boundaries exist, the more time % is required. (Status of: 2019-02-12) % % Introduced first in SolidGeometry 4.5 % % See also: turningdist % % [S,pso,T2,psc,ps]=CPSsimilaritymap(CPS,[tol]) % === INPUT PARAMETERS === % CPS: CPS struct or array of polyshape array % tol: tolerance for turningdist; default is 1e-7 ~ eps2 % === OUTPUT RESULTS ====== % S: cell list of similar boundaries n x ..... % pso: array of different shape: n elements % T2: List of 3x3 transformation matrix related to ps % psc: array of different shape n elements % ps: full array of boundary contour % % EXAMPLE: % SGfigure; % for i=1:3; CPLplotasPS(PLtransR(CPLsample(34),rot(randminv([-pi,pi])))+randminv(1,2,[-10 10])); end % for i=1:4; CPLplotasPS(PLtransR(CPLsample(33),rot(randminv([-pi,pi])))+randminv(1,2,[-20 20])); end % CPS=CPSofgca; CPSsimilaritymap(CPS), CPSsimilaritymap(CPS.ps) % % % See also: turningdist % % % Copyright 2019 Tim C. Lueth |
CPSplot(CPS,fc,fa,ec,lw)- plots a colored polygon from a CPS struct, a polyshape or a CPL |
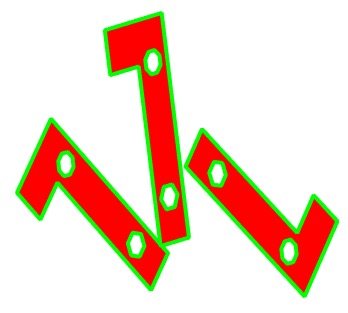 | % CPSplot(CPS,fc,fa,ec,lw) - plots a colored polygon from a CPS struct, a polyshape or a CPL % (by Tim Lueth, VLFL-Lib, 2019-FEB-11 as class: CLOSED POLYGON LISTS) % % should support CPS struct, and polyshape and CPL % the plot command changes the colors of plotted polyshapes % CPSplot plats always the default colors (Status of: 2022-01-30) % % Introduced first in SolidGeometry 4.5 % % See also: CPLanimateTL, CPSofgca, CCPSofgcalines, PLplot, CPLplot % % h=CPSplot(CPS,[fc,fa,ec,lw]) % === INPUT PARAMETERS === % CPS: CPS or ps % fc: optional FaceColor % fa: optional FaceAlpha % ec: optional EdgeColor % lw: optional Edge Line Width % === OUTPUT RESULTS ====== % h: handle to polygon graphics object % % EXAMPLE: % close all; SGfigure; CPLplot(PLcircle(10)); CPSplot(PLcircle(10),'b',.2,'g',2); CPS=CPSofgca % cla; CPSplot(CPS); shg % cla; CPSplot(CPS.ps); shg % % See also: CPLanimateTL, CPSofgca, CCPSofgcalines, PLplot, CPLplot % % % Copyright 2019-2022 Tim C. Lueth |
CPSouterboundary(CPS)- returns the outer boundary as CPS or polyshape |
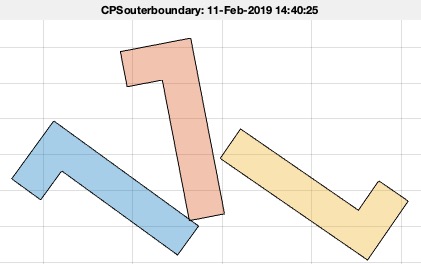 | % CPSouterboundary(CPS) - returns the outer boundary as CPS or polyshape % (by Tim Lueth, VLFL-Lib, 2019-FEB-11 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: CPSplot % % CPSN=CPSouterboundary(CPS) % === INPUT PARAMETERS === % CPS: CPS or polyshape % === OUTPUT RESULTS ====== % CPSN: CPS or polyshape of outer boundary % % See also: CPSplot % % % Copyright 2019 Tim C. Lueth |
CPSofgca(h)- returns a struct called Colored PolyShape (CPS) similar to a polygon array object |
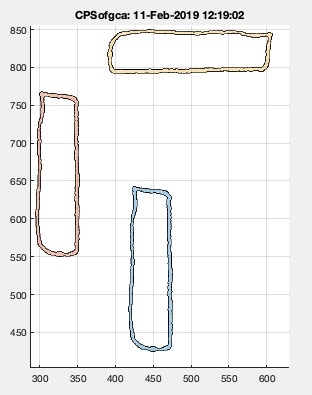 | % CPSofgca(h) - returns a struct called Colored PolyShape (CPS) similar to a polygon array object % (by Tim Lueth, VLFL-Lib, 2019-FEB-11 as class: CLOSED POLYGON LISTS) % % Matlab introduced new classes polygon as graphics object and polyshape % as geometric object. % Nevertheless, SG-Lib usees either CPL, polyshapes or colored polyshapes % that consist % ps polyshape array % fc facecolor array % fa facealpha array % ec edgecolor array % similar to poygon (Status of: 2019-02-11) % % Introduced first in SolidGeometry 4.5 % % See also: CPLplotasPS, CPSofpolygon % % CPS=CPSofgca([h]) % === INPUT PARAMETERS === % h: optional handle to implement CPSofpolygon % === OUTPUT RESULTS ====== % CPS: struct with ps, fc, fa, ec % % % EXAMPLE: % SGfigure; CPSplot(CPLsample(29),'b',.1,'g',2) % shg; CPSofgca % % See also: CPLplotasPS, CPSofpolygon % % % Copyright 2019 Tim C. Lueth |
Poseofimageui(I)- interactive fnct to defines three poses in a drawing image |
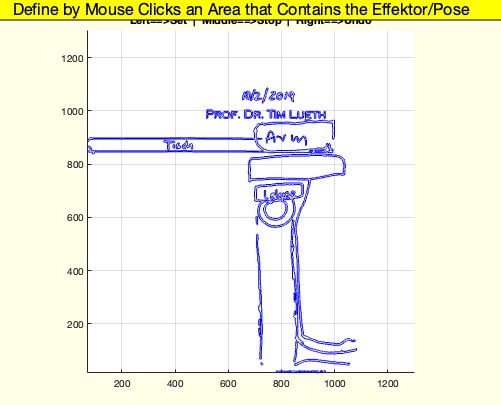 | % Poseofimageui(I) - interactive fnct to defines three poses in a drawing image % (by Tim Lueth, Video-Lib, 2019-FEB-10 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: PoseofCPLui, VLui, Poseui, Poseplot, Poseplotspace % % [PS,CPLB]=Poseofimageui(I) % === INPUT PARAMETERS === % I: image with a hand sketch or a simple drawing, or also a Pose in a % second try % === OUTPUT RESULTS ====== % PS: Pose struct with start points, end points B and effektor CPL % CPLB: separated Background contour that was not processed as pose % % EXAMPLE: % loadweb ('Posewheelchairimage.mat') % I=imofimsketch(Posewheelchairimage); % important step! % PS=Poseofimageui(I) % PS=Poseofimageui(PS) % % See also: PoseofCPLui, VLui, Poseui, Poseplot, Poseplotspace % % % Copyright 2019-2020 Tim C. Lueth |
SGarrow(l,h,s1,w)- returns a SG for an arrow |
 | % SGarrow(l,h,s1,w) - returns a SG for an arrow % (by Tim Lueth, VLFL-Lib, 2019-FEB-10 as class: SURFACES) % % Introduced first in SolidGeometry 4.5 % % See also: SGcone, SGsphere, SGbox, SGlinkage, SGtext, SGspherelink % % SG=SGarrow(l,[h,s1,w]) % === INPUT PARAMETERS === % l: length or [start point; end point] % h: diameter % s1: tip size % w: true or Radius for bending % === OUTPUT RESULTS ====== % SG: Solid geoemtry of an arrow in z-direction % % EXAMPLE: % SGarrow(100) % SGarrow(20,5) % SGarrow([10 10 10;20 20 20],5) % SGarrow(10,1,1,true) % creates a circular arrow % SGarrow(10,1,1,20) % circular arrow with radius 20 % % See also: SGcone, SGsphere, SGbox, SGlinkage, SGtext, SGspherelink % % % Copyright 2019-2020 Tim C. Lueth |
PLarrow(l,h,s1)- returns a point list for an arrow |
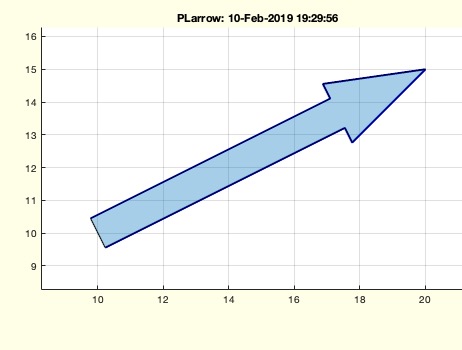 | % PLarrow(l,h,s1) - returns a point list for an arrow % (by Tim Lueth, VLFL-Lib, 2019-FEB-10 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: PLcircle, PLcircseg, PLevolvente, PLgearDIN, PLhelix, % PLkidney, PLrand, PLspiral, PLsquare, PLstar, PLcircleoval, PLtubbing % % PL=PLarrow(l,[h,s1]) % === INPUT PARAMETERS === % l: length (x=[0..l]) or [A0;B0] Start point and End point % h: height in mm; default is 10% % s1: tip size in mm; default is h % === OUTPUT RESULTS ====== % PL: Point list (open) of arrow % % EXAMPLE: % PLarrow(20); % PLarrow(20,5); % PLarrow(20,5,10); % PLarrow([10 10;-20 20]) % PLarrow([10 10;20 +15],2,3) % % See also: PLcircle, PLcircseg, PLevolvente, PLgearDIN, PLhelix, % PLkidney, PLrand, PLspiral, PLsquare, PLstar, PLcircleoval, PLtubbing % % % Copyright 2019 Tim C. Lueth |
imofimsketch(I)- uses an imbinarize filter to improve images before contourfind |
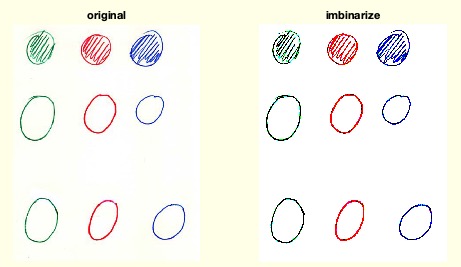 | % imofimsketch(I) - uses an imbinarize filter to improve images before contourfind % (by Tim Lueth, VLFL-Lib, 2019-FEB-10 as class: IMAGES) % % the filter was found in the matlab documentation (Status of: 2019-02-10) % % Introduced first in SolidGeometry 4.5 % % See also: CPLofimage, imreadlastchanged % % IN=imofimsketch(I) % === INPUT PARAMETERS === % I: Image of a scan or sketch of drawings or letters % === OUTPUT RESULTS ====== % IN: improved image % % EXAMPLE: % imofimsketch(rgbsketch); % % See also: CPLofimage, imreadlastchanged % % % Copyright 2019 Tim C. Lueth |
CPLremovearea(CPL,sline)- removes CPLs of small area using the polyshape class |
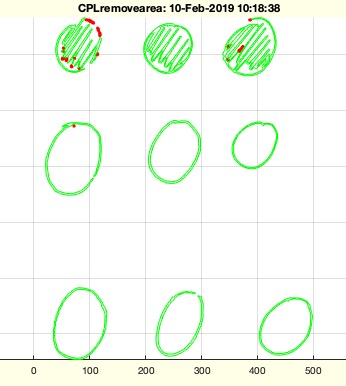 | % CPLremovearea(CPL,sline) - removes CPLs of small area using the polyshape class % (by Tim Lueth, VLFL-Lib, 2019-FEB-10 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: CPLremstraightAmin, CPLremstraight, imofimsketch, % CPLremoveregionsholes % % CPLN=CPLremovearea(CPL,[sline]) % === INPUT PARAMETERS === % CPL: Original CPL % sline: minimal length (not area) % === OUTPUT RESULTS ====== % CPLN: CPL without removed areas % % EXAMPLE: % I=rgbsketch; imshow(I); shg; % imshow(imofimsketch(I));shg % CPLremovearea(CPLofimage(I)) % CPLremovearea(CPLofimage(imofimsketch(I))) % % See also: CPLremstraightAmin, CPLremstraight, imofimsketch, % CPLremoveregionsholes % % % Copyright 2019 Tim C. Lueth |
elem2cell()- converts elements of a list into a cell list |
 | % elem2cell() - converts elements of a list into a cell list % (by Tim Lueth, VLFL-Lib, 2019-FEB-10 as class: AUXILIARY PROCEDURES) % % ======================================================================= % OBSOLETE (2022-04-30) - USE 'array2cell' INSTEAD % ======================================================================= % % elem2cell is mainly the same as {varargin}' % (lost knowhow from 2018-12-28 to 2019-02-10), x=array2cell(varargin)', % y=x{1}', vec=y % Some fnctns such as 'findobj' return a cell list of objects as % separated results. Accessing structured properties/methods of those % objects is possible by % a) using the "get command' which returns a cell list for instance % "get(h,'Shape')" % b) use the property name directly similar to a struct, or instance % "h.Shape" % In the second case (b) the property methods is called repeated times % for each element of the object list which returns several individual % results. % This fnctn converts the results list into a cell list of the same class % type % (Status of: 2022-02-26) % % Introduced first in SolidGeometry 4.5 % % See also: [ array2cell ] ; squeeze, elem2cols, elem2rows, get, % elem2array, arrayof, cell2class, class2cell, array2cell % % vec=elem2cell([]) % === OUTPUT RESULTS ====== % vec: array of same type as elem{1} filled with elem{:} % % EXAMPLE: % CPLplot(CPLsample(25)) % h=findobj(gca,'Type','line') % elem2cell(h.LineStyle) % auxilary fuction % {h.LineStyle}' % matlab code % % % % See also: [ array2cell ] ; squeeze, elem2cols, elem2rows, get, % elem2array, arrayof, cell2class, class2cell, array2cell % % % Copyright 2019-2022 Tim C. Lueth |
colorsofCPLofimage(CPL,I)- returns the original colors of the contours in an image |
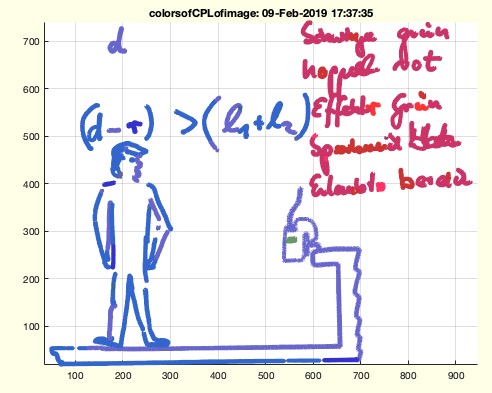 | % colorsofCPLofimage(CPL,I) - returns the original colors of the contours in an image % (by Tim Lueth, FileMaker, 2019-FEB-09 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.5 % % See also: SGshowcolors, CPLofimage, imreadlastchanged, % CPLofouterregionboundary % % [coli,cols]=colorsofCPLofimage(CPL,I) % === INPUT PARAMETERS === % CPL: Contour created by CPLofimage(I) % I: Image % === OUTPUT RESULTS ====== % coli: list of colors wrt to separateNaN % cols: color list of each point of CPL % % EXAMPLE: % I=imreadlastchanged; CPLofimage(I,1); CPL=ans; CPLofouterregionboundary(CPL); CPL=ans; % colorsofCPLofimage(CPL,I); % % See also: SGshowcolors, CPLofimage, imreadlastchanged, % CPLofouterregionboundary % % % Copyright 2019 Tim C. Lueth |
CPLofouterregionboundary(CPL,sline)- returns the outer boundary of regions of CPL |
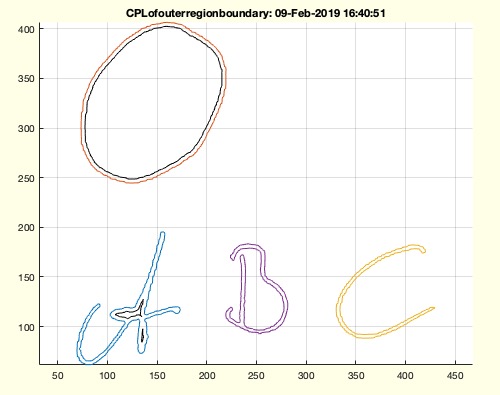 | % CPLofouterregionboundary(CPL,sline) - returns the outer boundary of regions of CPL % (by Tim Lueth, VLFL-Lib, 2019-FEB-09 as class: SLICES) % % Find out the difference to CPLfillinside % CPSplot(CPLfillinside(CPLsample(12))) % CPSplot(CPLofouterregionboundary(CPLsample(12))) (Status of: 2021-12-01) % % Introduced first in SolidGeometry 4.5 % % See also: CPLfillinside, CPLgrow, CPLbuffer % % CPLN=CPLofouterregionboundary(CPL,[sline]) % === INPUT PARAMETERS === % CPL: Closed polygon line % sline: additional line thickness; default is 1% of BB of CPL % === OUTPUT RESULTS ====== % CPLN: outer boundary of regions % % EXAMPLE: % CPSplot(CPLfillinside(CPLsample(12))) % CPSplot(CPLofouterregionboundary(CPLsample(12))) % % See also: CPLfillinside, CPLgrow, CPLbuffer % % % Copyright 2019-2021 Tim C. Lueth |
CPLsplitui(CPLA)- splits a CPL interactively into two CPLs |
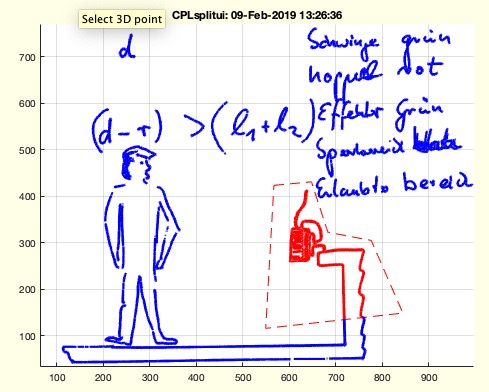 | % CPLsplitui(CPLA) - splits a CPL interactively into two CPLs % (by Tim Lueth, VLFL-Lib, 2019-FEB-09 as class: CLOSED POLYGON LISTS) % % same as CPLsplitbool (Status of: 2019-06-22) % % Introduced first in SolidGeometry 4.5 % % See also: CPLsplitbool, VLui, CPSlineui, CPLui, CPSui, PLui, % PLsquareui, PLcircleui, VLFLui, SGui, Poseofimageui, Poseui, SGTui % % [CPLA,CPLB,CPLC]=CPLsplitui(CPLA) % === INPUT PARAMETERS === % CPLA: Original Contour % === OUTPUT RESULTS ====== % CPLA: contour left after removal (BLUE) % CPLB: removed contour (RED) % CPLC: contour used to cut (DASHED) % % EXAMPLE: % imreadlastchanged;I=ans; CPLofimage(I); CPL=ans; CPLsplitui(CPL); % % See also: CPLsplitbool, VLui, CPSlineui, CPLui, CPSui, PLui, % PLsquareui, PLcircleui, VLFLui, SGui, Poseofimageui, Poseui, SGTui % % % Copyright 2019 Tim C. Lueth |
imreadlastchanged(iext,idir)- reads in the last modified image of a directory |
 | % imreadlastchanged(iext,idir) - reads in the last modified image of a directory % (by Tim Lueth, VLFL-Lib, 2019-FEB-09 as class: IMAGES) % % fnctn useful to read in snapshot save on the desktop directory (Status % of: 2022-05-18) % % Introduced first in SolidGeometry 4.5 % % See also: lasttouchedSG, CPLofdrawing, imreadui % % [im,fullnam]=imreadlastchanged([iext,idir]) % === INPUT PARAMETERS === % iext: image extensionsl default is {'*.png' '*.jpg' '*.tif'} % idir: image directory; default is desktopdir % === OUTPUT RESULTS ====== % im: image read in by image read % fullnam: full filename % % EXAMPLE: % imreadlastchanged % % See also: lasttouchedSG, CPLofdrawing, imreadui % % % Copyright 2019-2022 Tim C. Lueth |
SGkeyboardgetkey(hf)- returns the last key pressed |
 | % SGkeyboardgetkey(hf) - returns the last key pressed % (by Tim Lueth, VLFL-Lib, 2019-FEB-07 as class: USER INTERFACE) % % This fnctn automatically installs call back fnctn "SGkeyboardCallback" % (Status of: 2019-02-07) % % Introduced first in SolidGeometry 4.5 % % See also: SGkeyboardCallback % % [key,lastkey]=SGkeyboardgetkey([hf]) % === INPUT PARAMETERS === % hf: optional window handle; default is gcf % === OUTPUT RESULTS ====== % key: key pressed % lastkey: last key pressed % % EXAMPLE: % close all; for i=1:100; a=SGkeyboardgetkey; if~isempty(a); fprintf(2,'%s ',a.key); end; pause(.1); end; commandwindow; % SGfigure; for i=1:100; a=SGkeyboardgetkey; if~isempty(a); fprintf(2,'%s ',a.key); end; pause(.1); end;commandwindow; % % See also: SGkeyboardCallback % % % Copyright 2019 Tim C. Lueth |
SGkeyboardCallback(src,event)- used as KeyPressFcn-Callback within SG-Library |
 | % SGkeyboardCallback(src,event) - used as KeyPressFcn-Callback within SG-Library % (by Tim Lueth, VLFL-Lib, 2019-FEB-07 as class: USER INTERFACE) % % This fnctn helps to have easier access to pressed keyboard keys. It is % automatically installed by the fnctn "SGkeyboardgetkey". It requires an % open figure window. (Status of: 2019-02-07) % % Introduced first in SolidGeometry 4.5 % % See also: SGkeyboardgetkey, RRRun % % SGkeyboardCallback(src,event) % === INPUT PARAMETERS === % src: src of callback events % event: result of callback events % % EXAMPLE: % SGfigure; rotate3d off; set(gcf,'KeyPressFcn',@SGkeyboardCallback); % SGfigure; for i=1:100; a=SGkeyboardgetkey; if~isempty(a); cla; textVL([.5 .5],'',24,'',a.key); end; pause(.1); end;commandwindow; % % % See also: SGkeyboardgetkey, RRRun % % % Copyright 2019 Tim C. Lueth |
vecnormr(VL)- returns for a vector list (rows) the vectnorm result |
 | % vecnormr(VL) - returns for a vector list (rows) the vectnorm result % (by Tim Lueth, VLFL-Lib, 2019-FEB-07 as class: ANALYTICAL GEOMETRY) % % Since 2017b there is a vecnorm fnctn, unfortunatley for column format % This fnctn is almost the same speed as than vecnorm(VL,2,2) for small % VL. % (Status of: 2019-02-07) % % Introduced first in SolidGeometry 4.5 % % See also: vecnorm % % LL=vecnormr(VL) % === INPUT PARAMETERS === % VL: vector [n x 2] or [n x 3] as rows % === OUTPUT RESULTS ====== % LL: vector norm of the rows % % EXAMPLE: % v=rand(10,2), vecnormr(v) % tic; a=vecnormr(rand(1e7,3)); toc % tic; a=vecnorm(rand(1e7,3),2,2); toc % % See also: vecnorm % % % Copyright 2019-2020 Tim C. Lueth |
vec2number(ord)- converst a vector row into a number for vector elemetns of 1 to 9 |
 | % vec2number(ord) - converst a vector row into a number for vector elemetns of 1 to 9 % (by Tim Lueth, VLFL-Lib, 2019-FEB-06 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 4.5 % % See also: round, number2vec, digitofnum % % [z,s]=vec2number(ord) % === INPUT PARAMETERS === % ord: vector of integer between 1 and 9 % === OUTPUT RESULTS ====== % z: number % s: string of number % % EXAMPLE: % vec2number([1 2 3]) % [a,b]=vec2number([1 2 3]) % % See also: round, number2vec, digitofnum % % % Copyright 2019 Tim C. Lueth |
isincirclesegment(cseg,WL)- returns whether an angle or a angle list is inside an angle interval |
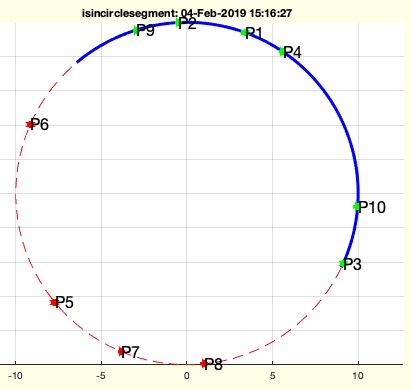 | % isincirclesegment(cseg,WL) - returns whether an angle or a angle list is inside an angle interval % (by Tim Lueth, VLFL-Lib, 2019-FEB-04 as class: ANALYTICAL GEOMETRY) % % frustrating testing lead to this ugly fnctn....... (Status of: % 2021-12-14) % % Introduced first in SolidGeometry 4.5 % % See also: isintriangle, isInterior, CPLcrosscircseg, angleshift, % angleinterv, cplot % % ins=isincirclesegment(cseg,WL) % === INPUT PARAMETERS === % cseg: angle interval; second values must be larger than first value % WL: angle list % === OUTPUT RESULTS ====== % ins: logical table which angle is inside % % EXAMPLE: % a=randminv([0-2*pi 2*pi]); isincirclesegment ([a a+randminv([0 2*pi])],randminv(10,1,[-pi pi])); % a=randminv([0-2*pi 2*pi]); wlim=[a a+randminv([0 2*pi])], isincirclesegment (wlim,[randminv(10,1,[-pi pi]); wlim']); % % See also: isintriangle, isInterior, CPLcrosscircseg, angleshift, % angleinterv, cplot % % % Copyright 2019-2021 Tim C. Lueth |
BBofPose(PS)- returns the bounding box of a Pose |
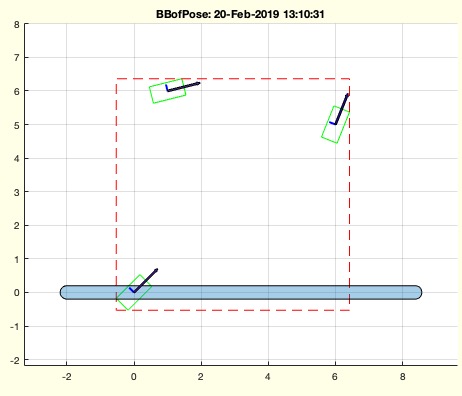 | % BBofPose(PS) - returns the bounding box of a Pose % (by Tim Lueth, VLFL-Lib, 2019-FEB-04 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.5 % % See also: BBofVL, BBofSG, BBofCPS, BBofCPL, BBofPS, BBofSGcutT, BBgrow, % BBaddtolerance % % bb=BBofPose(PS) % === INPUT PARAMETERS === % PS: Closed Polygon Line % === OUTPUT RESULTS ====== % bb: bb [xmin xmax ymin ymax] % % EXAMPLE: % BBofPose(Posesample(7)); Poseplot(Posesample(7)); % % See also: BBofVL, BBofSG, BBofCPS, BBofCPL, BBofPS, BBofSGcutT, BBgrow, % BBaddtolerance % % % Copyright 2019-2022 Tim C. Lueth |
checkfourbarsegment(l1,l2,r,A0,PL,na)- calculates the angle intervals for a fourbar linkage and appoint point to the intervall |
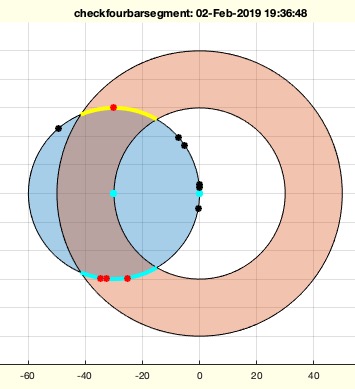 | % checkfourbarsegment(l1,l2,r,A0,PL,na) - calculates the angle intervals for a fourbar linkage and appoint point to the intervall % (by Tim Lueth, VLFL-Lib, 2019-FEB-01 as class: KINEMATICS AND FRAMES) % % wres return no, one or two angle intervalls for the fourbar linkage. % For a point of CRANK Positions (not Poses), s returns the segment % The fnctn "realfourbarsolutions" analyzes the result of "invkinplan2" % to detect a rotation, segment or two separated segments. % In contrast to that % The fnctn "checkfourbarsegment" returns the angle areas for on or two % segments % (Status of: 2019-05-05) % % Introduced first in SolidGeometry 4.5 % % See also: invkinplan2, miofPLA0B0, realfourbarsolutions, invkinplan2, % shiftindexofinvkinplan2 % % [wres,s,WL,ord,PL1,PL2]=checkfourbarsegment([l1,l2,r,A0,PL,na]) % === INPUT PARAMETERS === % l1: l1 of swing arm % l2: l2 of swing arm % r: r of crank % A0: Distance or A0 or [A0;B0] % PL: Points list to check or Pose with field A for PL % na: number of points for plotting contours PL1 and PL2 % === PROPERTY NAMES ===== % 'silent' : if used, there will be no singularity warning % === OUTPUT RESULTS ====== % wres: false or empty or [seg_min seg_max] or [seg1_min seg1_max % seg_2min seg_2max] % s: list of angle segment per point zero, one or two % WL: angles of Points % ord: order of points % PL1: PLR-CYAN CONTOUR Point list for rotation of complete segment 1 % (blue, cyan) % PL2: PLR=YELL CONTOUR Point list for rotation of complete segment 2 % (yellow) % % EXAMPLE: % checkfourbarsegment(40,10,30,30,randminv(10,2,[-1 1])+[-30 0]); % close all; checkfourbarsegment(40,10,30,30,1000*randminv(50,2,[-1 1])+[-30 0]) % close all; [a,b]=checkfourbarsegment(40,10,30,30,randminv(10,2,[-1 1])+[-30 0]) % testfunctTL('checkfourbarsegment(60,40,51,[0 0;#1 #2])',[-50 0 +50],[-50 0 +50]); % testfunctTL('checkfourbarsegment(60,40,200,[#1 #2;0 0])',[-95 10 +95],[-95 10 +95]); % % See also: invkinplan2, miofPLA0B0, realfourbarsolutions, invkinplan2, % shiftindexofinvkinplan2 % % % Copyright 2019 Tim C. Lueth |
checkfourbarNPose(A,B,S,dws,k,pl)- checks whether a fourbar joint solution exists for results of center3Pose |
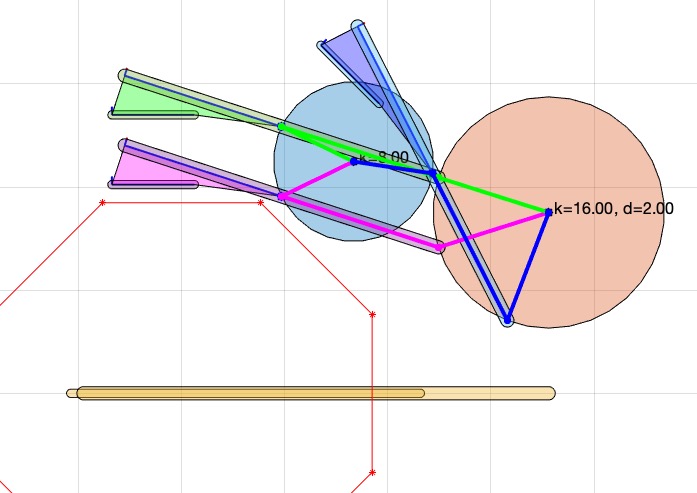 | % checkfourbarNPose(A,B,S,dws,k,pl) - checks whether a fourbar joint solution exists for results of center3Pose % (by Tim Lueth, VLFL-Lib, 2019-FEB-01 as class: KINEMATICS AND FRAMES) % % r= S(ka,4); % radius of crank % l1=S(kb,4); % radius of follower % l2=S(kb,1)-S(ka,1); % length of coupler % do=S(ka,5); % displacement of coupler % wo=S(ka,6); % Angle deviation before displacement % A0=S(ka,2:3); % Base of crank % B0=S(kb,2:3); % Base of follower % d=norm(A0-B0); % distance between both bases % % ====================================================================== % THIS FNCTN IS PART OF THE SEQUENCE % 1. Create Poses as List of Startpoints A and Endpoints B uses % Posesample or Poseui: % >> PS=Poseui(3,.2); SGfigure; Poseplot(PS); % >> PS.A=[-0.00 0.00; 0.00 1.00; 1.00 3.00]; PS.B=[ 1.00 0.00; 1.00 % 1.00; 1.71 2.29]; % 2. Calculate a set of parameter variations for possible Solutions: % >> center3Pose(PS.A,PS.B,-20:20,-20:5:20,-3:.2:3); S=ans; whos C; % 3. Calculate and analyze all possible permutations of the parameter % variation: % >> checkfourbar3Posepermutation(PS.A,PS.B,S); FP=ans; % >> checkfourbar3Pose(PS.A,PS.B,S); % if there is only one assembly % 4. Limit the Solution to your needs by limiting the permutations, for % example % FULL ROTATION 'u',0 DIMENSION 'l1l2rd',[5 8] % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','u',0,'l1l2rd',[2 4]); % OR FULL ROTATION 'u',0 BASES INSIDE AN AREA % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','cpl',PLcircle(2)+[3 % 3],'l1l2rd',[0 3]); % ====================================================================== % All those fnctns are based on % invkinplan2 - that calculates both configurations for a planar 2bar % linkage (Status of: 2019-02-01) % % Introduced first in SolidGeometry 4.5 % % See also: center3Pose, checkfourbar3Pose, Posesample, Poseplot, % TofPose, Posenorm, Poseui % % [ci,perr,werr,oci]=checkfourbarNPose(A,B,S,[dws,k,pl]) % === INPUT PARAMETERS === % A: Starting Points of 3 Poses % B: Ending Points of 3 Poses % S: Solutions comming from center3Pose % dws: selected pair of distance and angle % k: selected values for k; default are first and last of S % pl: length of pose % === OUTPUT RESULTS ====== % ci: configuration for pose of a fourbar linkage % perr: % werr: % oci: % % EXAMPLE: % PS.A=[10.50 -4.38; 3.50 -10.50; -5.25 -10.50]; PS.B=[ 9.79 -5.08; 2.50 -10.50; -5.96 -9.79]; % center3Pose(PS.A,PS.B,[-10 00],0,-pi/4); S=ans, CPLplot(CPLsample(4)); checkfourbar3Pose(PS.A,PS.B,S,'verbose % % See also: center3Pose, checkfourbar3Pose, Posesample, Poseplot, % TofPose, Posenorm, Poseui % % % Copyright 2019 Tim C. Lueth |
center4Pose(A,B,k,dall,wall,CPL);- return center points for 3 poses (position and orientation) |
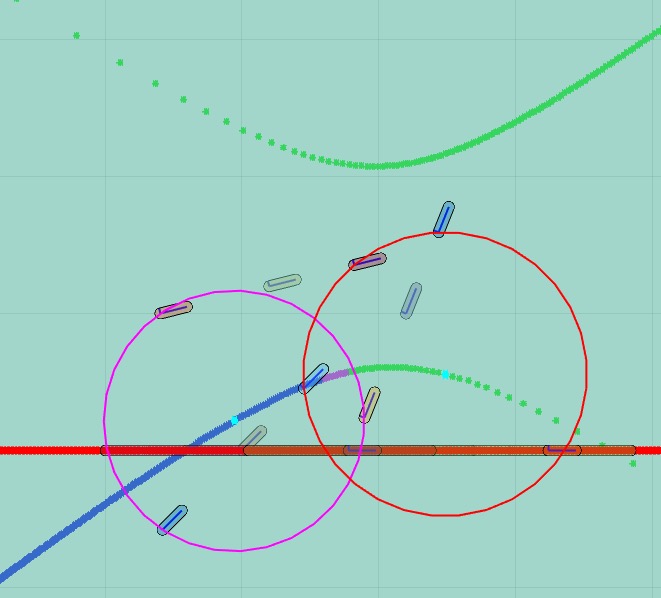 | % center4Pose(A,B,k,dall,wall,CPL); - return center points for 3 poses (position and orientation) % (by Tim Lueth, VLFL-Lib, 2019-JAN-31 as class: ANALYTICAL GEOMETRY) % % The center4Pose fnctn uses the center3Pose fnctn to calculate in the % following way: % The center3Pose fnctn searches the center of rotation/circle center for % the three starting points of a pose. The fnctn also searches for the % center of rotation/circle center for the three end points of a pose. % These rotation centers are the attachment points for the crank and for % the four-joint swingarm, while the distance between the attachment % points defines the minimum length of the coupling. For the three pose % synthesis, however, the later can freely choose the coupling length, % since each point along the pose lines can theoretically be chosen as % attachment points for the crank and for the swingarm. This is not the % case with four pose synthesis. In four-pose synthesis, a point must be % found on the coupling line where the circular arc of the three-point % synthesis a selected k runs randomly on the first three coupling lines % through the corresponding k-point on the fourth coupling line. This can % be approximated by a numerical search. If it is possible to find at % least two such points, at least one can realize a coupling. Whether all % four poses are reachable in the same joint configuration and whether % all four poses are reachable in the same angular segment and in the % correct order can only be checked afterwards. % ====================================================================== % center3Pose is a very powerful fnctn for the design of fourbar linkages % under a variety of optimization criterias. % k stands for the distance of the coupler point to the poses % r stands for the radius of the crank % C stands for the base of the crank % d stands for the distance of coupler to pose % w stand for angle deviation of coupler to pose % e stands for the distance error of the found solution % For a fourbar linkage it is necessary to select two k points to get two % center points for crank and follower. % ====================================================================== % THIS FNCTN IS PART OF THE SEQUENCE % 1. Create Poses as List of Startpoints A and Endpoints B uses % Posesample or Poseui: % >> PS=Poseui(3,.2); SGfigure; Poseplot(PS); % >> PS.A=[-0.00 0.00; 0.00 1.00; 1.00 3.00]; PS.B=[ 1.00 0.00; 1.00 % 1.00; 1.71 2.29]; % 2. Calculate a set of parameter variations for possible Solutions: % >> center3Pose(PS.A,PS.B,-20:20,-20:5:20,-3:.2:3); S=ans; whos C; % 3. Calculate and analyze all possible permutations of the parameter % variation: % >> checkfourbar3Posepermutation(PS.A,PS.B,S); FP=ans; % >> checkfourbar3Pose(PS.A,PS.B,S); % if there is only one assembly % 4. Limit the Solution to your needs by limiting the permutations, for % example % FULL ROTATION 'u',0 DIMENSION 'l1l2rd',[5 8] % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','u',0,'l1l2rd',[2 4]); % OR FULL ROTATION 'u',0 BASES INSIDE AN AREA % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','cpl',PLcircle(2)+[3 % 3],'l1l2rd',[0 3]); % ====================================================================== % All those fnctns are based on % invkinplan2 - that calculates both configurations for a planar 2bar % linkage (Status of: 2019-01-31) % % Introduced first in SolidGeometry 4.5 % % See also: center3P, center3Pose, center3Poseconditions, % checkfourbar3Pose, checkallfourbar3Poses, Posesample, Poseplot, % TofPose, Posenorm, Poseui % % [S,rs,Sall,PSall,dw]=center4Pose([A,B,k,dall,wall,CPL]); % === INPUT PARAMETERS === % A: List of at least 3 points that define a pose % B: List of at least 3 points that define a direction in combination % with A % k: list of checking values for a point along the line A+k*(B-A)/|(B-A)| % dall: displacement orthogonal to pose line; default is 0 % wall: turning angle of the pose relative to pose; default is 0; % CPL: Optional area for solutions % === OUTPUT RESULTS ====== % S: [k C r d w] % rs: real solutions if CPL is used % Sall: All Solutions S=Sall(rs,:) % PSall: All Poses % dw: % % EXAMPLE: % PS=Posesample(7), center3Pose(PS.A,PS.B,[-20:20]) % PS=Posesample(10), center3Pose(PS.A,PS.B,[-20:20]) % PS=Posesample(10), center4Pose(PS.A,PS.B,[-20:20]) % % PS=Posesample(10); PS.B(4,:)=PS.B(4,:)+[0 0]; SGfigure; Poseplot(PS); % center4Pose(PS.A,PS.B,[-200:.1:200]); axis([-10 40 -20 20]) % % See also: center3P, center3Pose, center3Poseconditions, % checkfourbar3Pose, checkallfourbar3Poses, Posesample, Poseplot, % TofPose, Posenorm, Poseui % % % Copyright 2019 Tim C. Lueth |
SGcolorseparation(SG,sel)- returns a cell list or SG separated by colors |
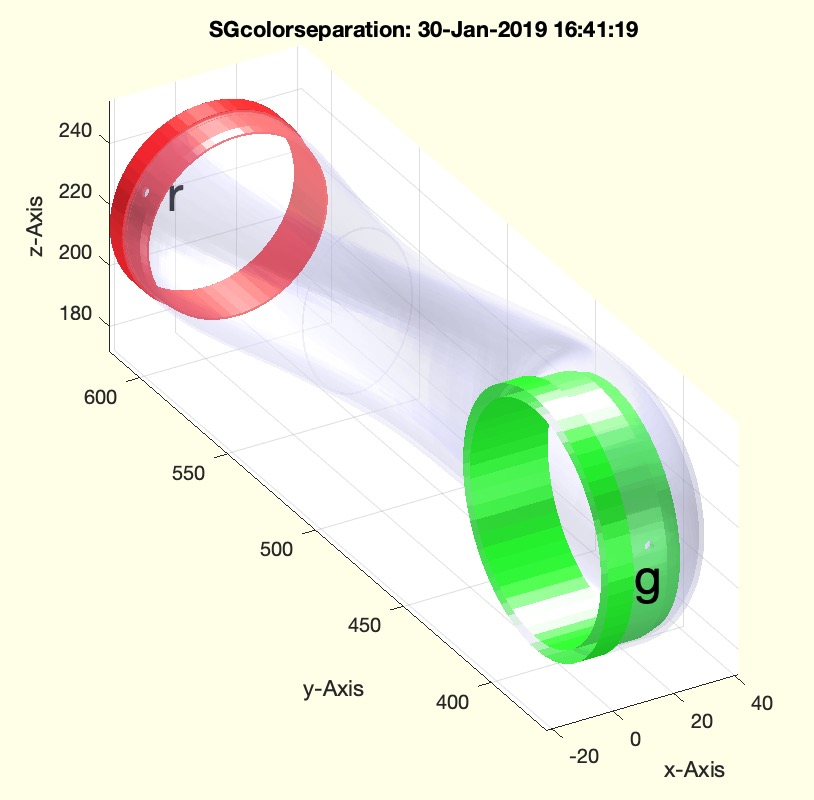 | % SGcolorseparation(SG,sel) - returns a cell list or SG separated by colors % (by Tim Lueth, VLFL-Lib, 2019-JAN-30 as class: SURFACES) % % Introduced first in SolidGeometry 4.5 % % See also: SGsurfaces, SGseparate, surfacesofSG, SGsurfaceselect, % SGsurfaceplot, SGcolorfaces % % SGC=SGcolorseparation(SG,[sel]) % === INPUT PARAMETERS === % SG: struct with fields; VL, FL, FC % sel: selector; list of chars or a list of rgb values [0..1 0..1 0..1] % === OUTPUT RESULTS ====== % SGC: cell list or colored Solid Geometry % % EXAMPLE: % SGcolorseparation(A,[1 0 0]) % SGcolorseparation(A,'rg') % % See also: SGsurfaces, SGseparate, surfacesofSG, SGsurfaceselect, % SGsurfaceplot, SGcolorfaces % % % Copyright 2019 Tim C. Lueth |
PoseofT(T,CPL)- returns pose struct from a list of HT matrices either 3x3 or 4x4 |
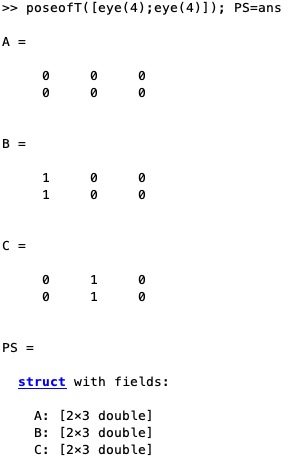 | % PoseofT(T,CPL) - returns pose struct from a list of HT matrices either 3x3 or 4x4 % (by Tim Lueth, VLFL-Lib, 2019-JAN-30 as class: KINEMATICS AND FRAMES) % % can be used to create poses from the result of CPSsimilaritymap or % Poseofimageui % (Status of: 2019-02-12) % % Introduced first in SolidGeometry 4.5 % % See also: TofPose, poseofT, CPSsimilaritymap, Poseofimageui % % PS=PoseofT(T,[CPL]) % === INPUT PARAMETERS === % T: List of transformation matrix either [3*n x 3], [3,3,n] % [4*n,4],[4,4,n] % CPL: Optional Contour to save as PS.CPLE % === OUTPUT RESULTS ====== % PS: Pose = PS.A, PS.B (X-axis) PS.C (y-axis) % % EXAMPLE: % PS=Posesample(7), T=TofPose(PS), poseofT(T) % % See also: TofPose, poseofT, CPSsimilaritymap, Poseofimageui % % % Copyright 2019 Tim C. Lueth |
fcreationdate(fname)- returns the creation date for a file or file list |
 | % fcreationdate(fname) - returns the creation date for a file or file list % (by Tim Lueth, VLFL-Lib, 2019-JAN-29 as class: FILE HANDLING) % % for all system commands see % dir('/usr/bin/*')' % dir('/usr/bin/*') % s=datenum('01-jan-2019'); XXXXX(elem2array(XXXXX{:,6})>s,:) (Status of: % 2022-05-18) % % Introduced first in SolidGeometry 4.5 % % See also: creationdatefile, dir, ls, lasttouchedSG % % crdat=fcreationdate(fname) % === INPUT PARAMETERS === % fname: file name or file wildcard % === OUTPUT RESULTS ====== % crdat: creation date or cell list % % EXAMPLE: % fcreationdate('PL*.m'); XXXXX=ans % s=datenum('01-jan-2017'); XXXXX(elem2array(XXXXX{:,6})>s,:) % % See also: creationdatefile, dir, ls, lasttouchedSG % % % Copyright 2019-2022 Tim C. Lueth |
