axisAIM- Just sets some figure values for the AIM Book von Tim Lueth and Mattias Traeger |
 | % axisAIM - Just sets some figure values for the AIM Book von Tim Lueth and Mattias Traeger % (by Tim Lueth, VLFL-Lib, 2022-DEZ-25 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: exportgraphicsSG % % axisAIM % % EXAMPLE: % SGfigure(-30,30); % axisAIM % exportgraphicsSG % % See also: exportgraphicsSG % % % Copyright 2022-2023 Tim C. Lueth |
AIM_NavCarm- Creation of Pictures for a Navigation C-Arm scenario |
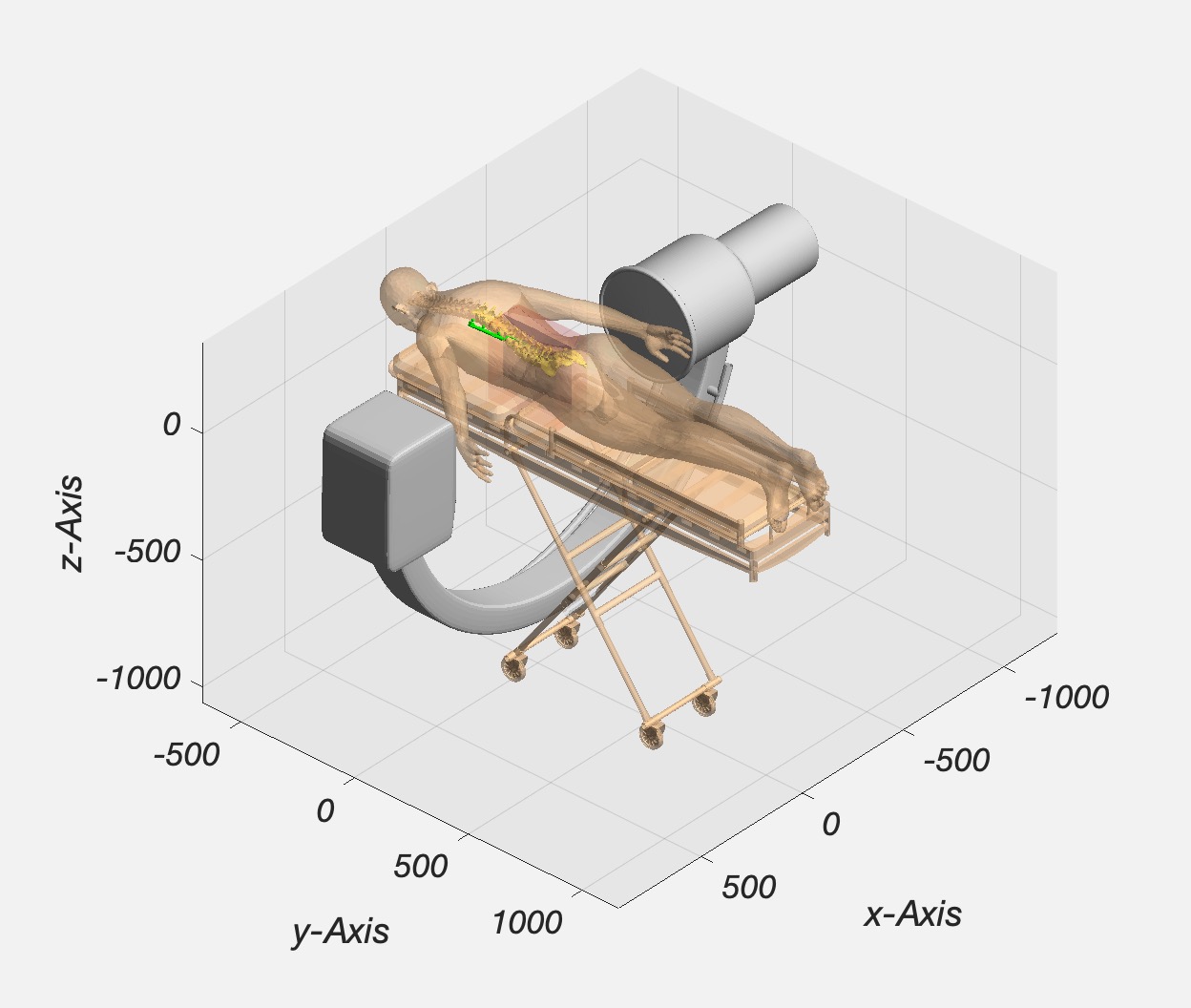 | % AIM_NavCarm - Creation of Pictures for a Navigation C-Arm scenario % (by Tim Lueth, VLFL-Lib, 2022-DEZ-24 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 5.2 % % See also: AIM_NavEndo % % AIM_NavCarm % % See also: AIM_NavEndo % % % Copyright 2022-2023 Tim C. Lueth |
ezofT(T)- just returns the ez vector of an HT Matrix as row |
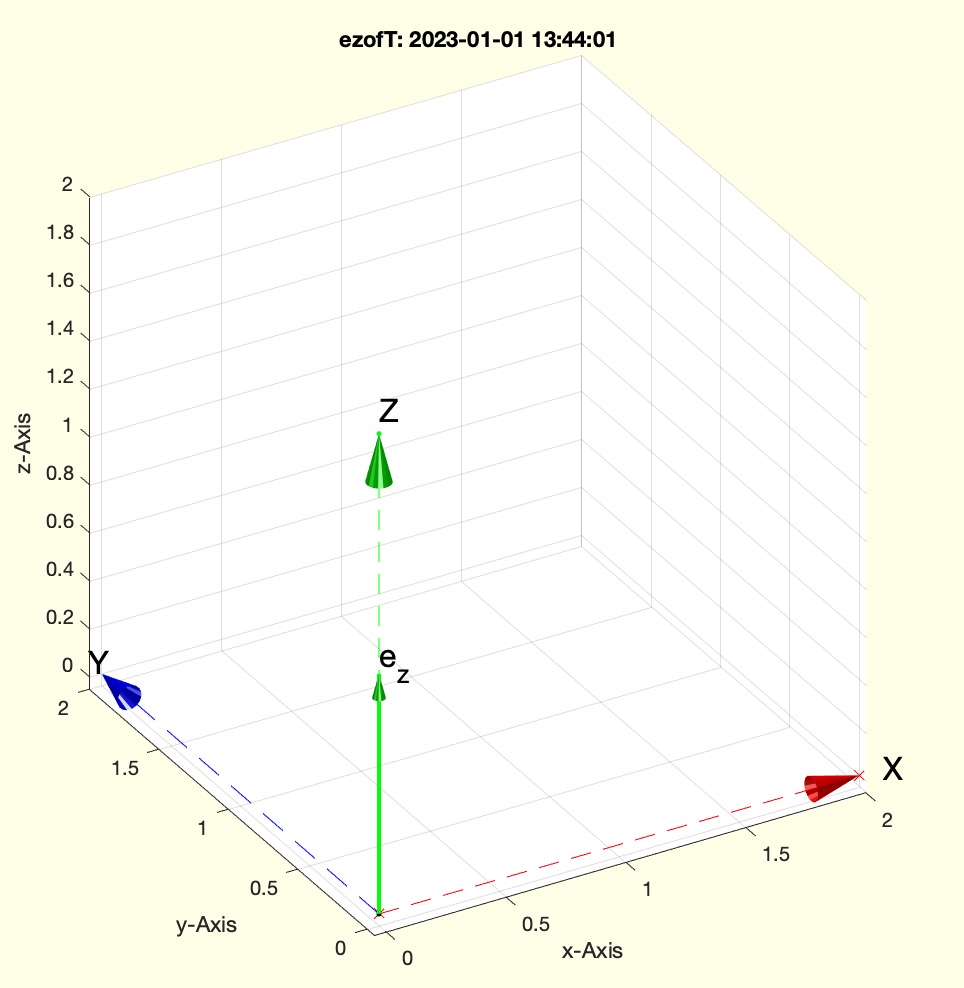 | % ezofT(T) - just returns the ez vector of an HT Matrix as row % (by Tim Lueth, VLFL-Lib, 2022-DEZ-19 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 5.2 % % See also: ezofchar, ezof3P % % ez=ezofT([T]) % === INPUT PARAMETERS === % T: DH Matrix 4x4 % === OUTPUT RESULTS ====== % ez: T(1:3,3)' % % EXAMPLE: % ezofT(TofR([0 pi/2 pi/4])) % % See also: ezofchar, ezof3P % % % Copyright 2022-2023 Tim C. Lueth |
exportgraphicsSG(go,fname)- creates figure exports for the AIM Book or other Books of Tim Lueth |
 | % exportgraphicsSG(go,fname) - creates figure exports for the AIM Book or other Books of Tim Lueth % (by Tim Lueth, VLFL-Lib, 2022-DEZ-19 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: axisAIM, setgcapixelsize % % exportgraphicsSG([go,fname]) % === INPUT PARAMETERS === % go: default is gca % fname: default is desktopdir('SNAPSHOT') % % See also: axisAIM, setgcapixelsize % % % Copyright 2022-2023 Tim C. Lueth |
SGendoscope(D,L)- Creates an Endoscope in KARL STORZ Design |
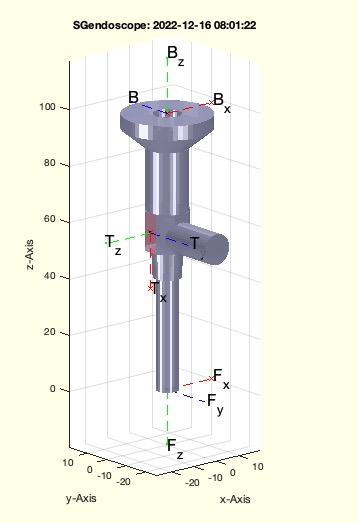 | % SGendoscope(D,L) - Creates an Endoscope in KARL STORZ Design % (by Tim Lueth, VLFL-Lib, 2022-DEZ-16 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: AIM_NavEndo % % SG=SGendoscope([D,L]) % === INPUT PARAMETERS === % D: Diameter % L: Length % === OUTPUT RESULTS ====== % SG: Solid Geoemtry % % EXAMPLE: % SGendoscope(8,40) % % See also: AIM_NavEndo % % % Copyright 2022-2023 Tim C. Lueth |
setcamangle(na,nd)- set the camera angle is set |
 | % setcamangle(na,nd) - set the camera angle is set % (by Tim Lueth, VLFL-Lib, 2022-DEZ-16 as class: VISUALIZATION) % % This fnctn belongs to a set of fnctn useful for AIM lectures (Status % of: 2022-12-16) % % Introduced first in SolidGeometry 5.2 % % See also: setcamzoom, setcamdistance, setcamtarget, setcamdirection % % setcamangle([na,nd]) % === INPUT PARAMETERS === % na: empty or 3D point or 4x4 HT Matrix % nd: % % EXAMPLE: % load AIM.mat; VM=V; [AM,as]=VMresize(VM,[0.5 0.5 0.5],vs); AM(:,230:256,:)=0; % SG=SGofVMisosurface(AM>1400,as); % SGfigure; SGplotalpha(SG,'w',0.5); rotate3dlight('off') % view(-30,30); setcamtarget % % % See also: setcamzoom, setcamdistance, setcamtarget, setcamdirection % % % Copyright 2022 Tim C. Lueth |
AIM_NavEndo- Creation of Pictures for a Navigation C-Arm scenario |
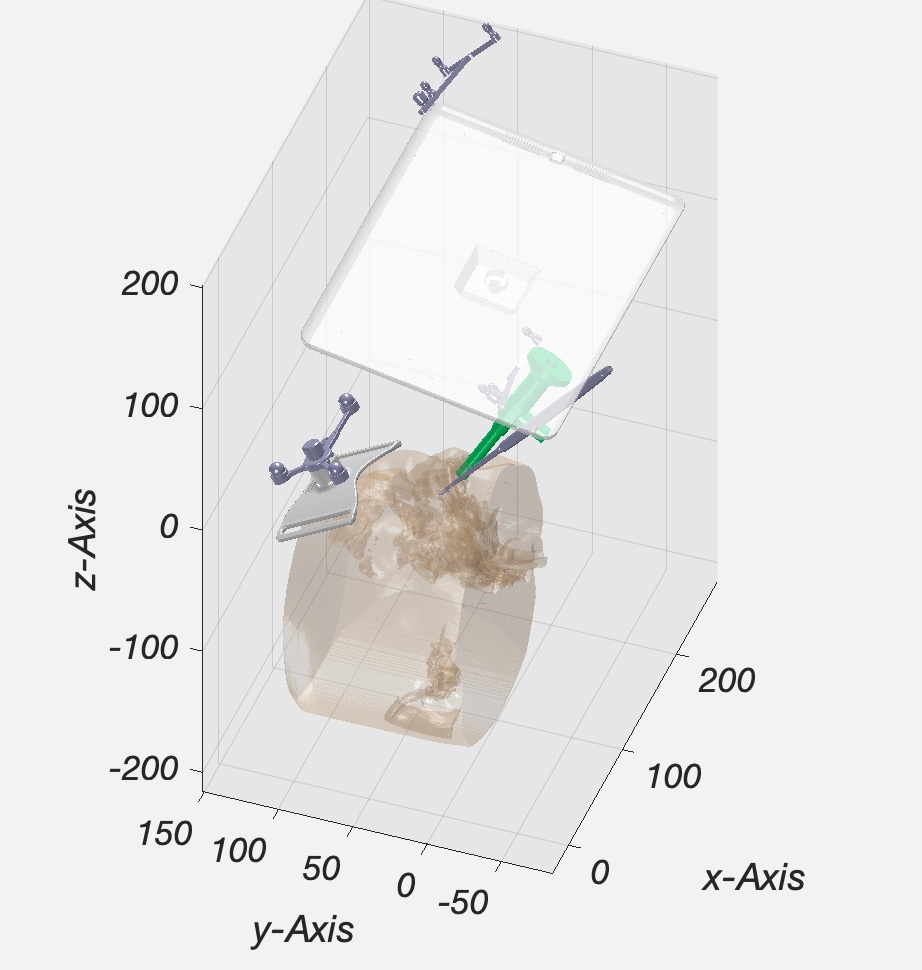 | % AIM_NavEndo - Creation of Pictures for a Navigation C-Arm scenario % (by Tim Lueth, VLFL-Lib, 2022-DEZ-15 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 5.2 % % See also: AIM_NavEndo, AIM_NavCarm % % AIM_NavEndo % % See also: AIM_NavEndo, AIM_NavCarm % % % Copyright 2022-2023 Tim C. Lueth |
setcamdirection(T)- sets the camera position without changing the camera target |
 | % setcamdirection(T) - sets the camera position without changing the camera target % (by Tim Lueth, VLFL-Lib, 2022-DEZ-13 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: setcamdistance, setcamtarget, setcamzoom % % setcamdirection(T) % === INPUT PARAMETERS === % T: ez or HT matrix; only ez is used % % EXAMPLE: % SGbox; pause(1); setcamdirection([1 1 1]); shg % % % See also: setcamdistance, setcamtarget, setcamzoom % % % Copyright 2022-2023 Tim C. Lueth |
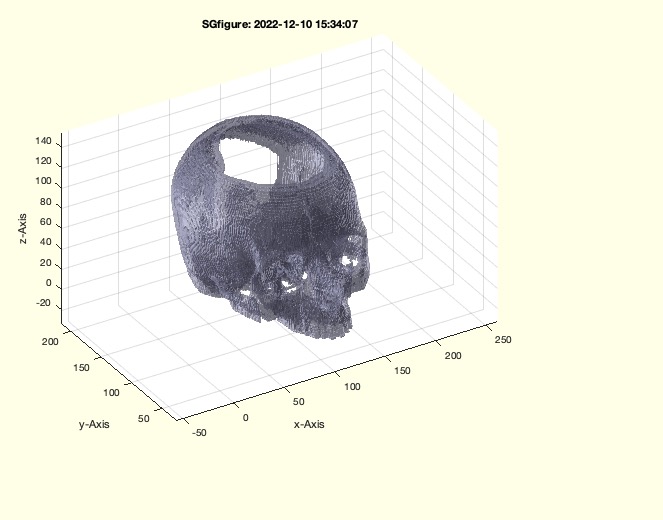
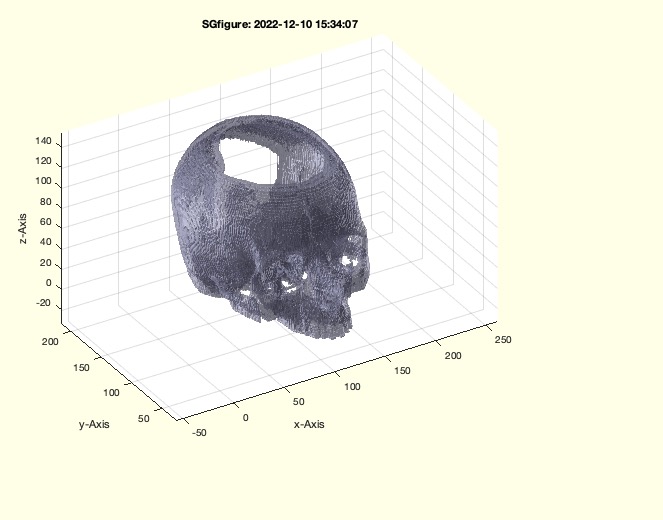
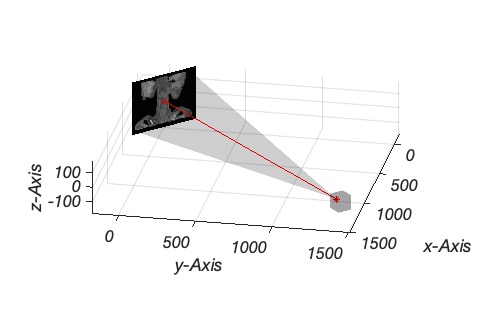
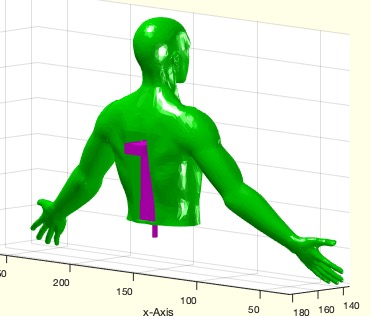
SGimaging(SG,T,d,al,pix,dims)- creates a simulated transparent surface view or slice view |
 | % SGimaging(SG,T,d,al,pix,dims) - creates a simulated transparent surface view or slice view % (by Tim Lueth, VLFL-Lib, 2022-DEZ-10 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % [I,TI,sc]=SGimaging(SG,[T,d,al,pix,dims]) % === INPUT PARAMETERS === % SG: Solid Geometry % T: View direction of target to camera % d: thickness of volume % al: alpha value of solid during imaging % pix: pixel size of image; default is 512 x 512 % dims: dimensions of the image; default is maximum % === OUTPUT RESULTS ====== % I: Image struct including cdata, 'TI', and 'sc' as fields % TI: Frame of upper left pixel % sc: scale of image % % EXAMPLE: % load AIM.mat; VM=V; [AM,as]=VMresize(VM,[0.5 0.5 0.5],vs); AM(:,230:256,:)=0; % SG=SGofVMisosurface(smooth3(AM>1400),as); % SGimaging(SG,[-1 -1 1],'',1); % SGimaging(SG,[-1 -1 1],'',1,1024); % SGimaging(SG,[-1 -1 1],'',1,1024,[50 600]); % % % % Copyright 2022 Tim C. Lueth |
setcamzoom(zf)- zoom by changing the camera view angle; |
 | % setcamzoom(zf) - zoom by changing the camera view angle; % (by Tim Lueth, VLFL-Lib, 2022-DEZ-09 as class: VISUALIZATION) % % This fnctn belongs to a set of fnctn useful for AIM lectures (Status % of: 2022-12-13) % % Introduced first in SolidGeometry 5.2 % % See also: setcamdistance, setcamtarget, setcamdirection % % setcamzoom([zf]) % === INPUT PARAMETERS === % zf: zoom factor; default is 1 % % EXAMPLE: % load AIM.mat; VM=V; [AM,as]=VMresize(VM,[0.5 0.5 0.5],vs); AM(:,230:256,:)=0; % SG=SGofVMisosurface(AM>1400,as); % SGfigure; SGplotalpha(SG,'w',0.5); rotate3dlight('off') % view(-30,30); setcamdistance(1000); setcamzoom(10); % % See also: setcamdistance, setcamtarget, setcamdirection % % % Copyright 2022 Tim C. Lueth |
setcamtarget (pp)- set the camera target interactively by a mouse click or a point or a frame |
 | % setcamtarget (pp) - set the camera target interactively by a mouse click or a point or a frame % (by Tim Lueth, VLFL-Lib, 2022-DEZ-09 as class: VISUALIZATION) % % This fnctn belongs to a set of fnctn useful for AIM lectures (Status % of: 2022-12-13) % % Introduced first in SolidGeometry 5.2 % % See also: setcamzoom, setcamdistance, setcamdirection % % setcamtarget([pp]) % === INPUT PARAMETERS === % pp: empty or 3D point or 4x4 HT Matrix % % EXAMPLE: % load AIM.mat; VM=V; [AM,as]=VMresize(VM,[0.5 0.5 0.5],vs); AM(:,230:256,:)=0; % SG=SGofVMisosurface(AM>1400,as); % SGfigure; SGplotalpha(SG,'w',0.5); rotate3dlight('off') % view(-30,30); setcamtarget % % % See also: setcamzoom, setcamdistance, setcamdirection % % % Copyright 2022 Tim C. Lueth |
setcamdistance(nd,zf)- The distance of the camera position relative to the target position is fixed |
 | % setcamdistance(nd,zf) - The distance of the camera position relative to the target position is fixed % (by Tim Lueth, VLFL-Lib, 2022-DEZ-09 as class: VISUALIZATION) % % This fnctn belongs to a set of fnctn useful for AIM lectures (Status % of: 2022-12-13) % % Introduced first in SolidGeometry 5.2 % % See also: setcamtarget, setcamzoom, setcamdirection % % setcamdistance([nd,zf]) % === INPUT PARAMETERS === % nd: new distance; default is unchanged % zf: zoom factor at this positionl default is 1 % % EXAMPLE: % load AIM.mat; VM=V; [AM,as]=VMresize(VM,[0.5 0.5 0.5],vs); AM(:,230:256,:)=0; % SG=SGofVMisosurface(AM>1400,as); % SGfigure; SGplotalpha(SG,'w',0.5); rotate3dlight('off') % setcamdistance % setcamdistance(1000) % setcamdistance(1000,2) % % % % See also: setcamtarget, setcamzoom, setcamdirection % % % Copyright 2022 Tim C. Lueth |
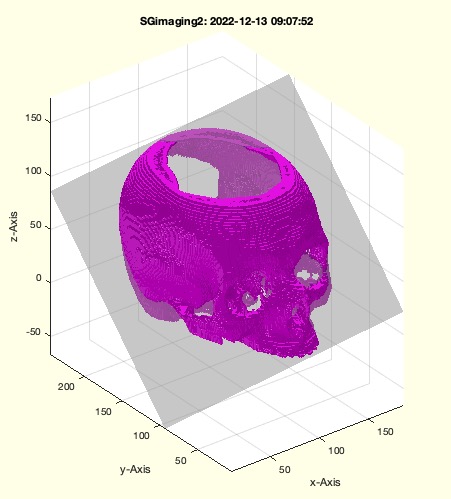
SGcut2T(SG,T1,T2,ct)- cuts out the SG that is below frame T1 and frame T2 |
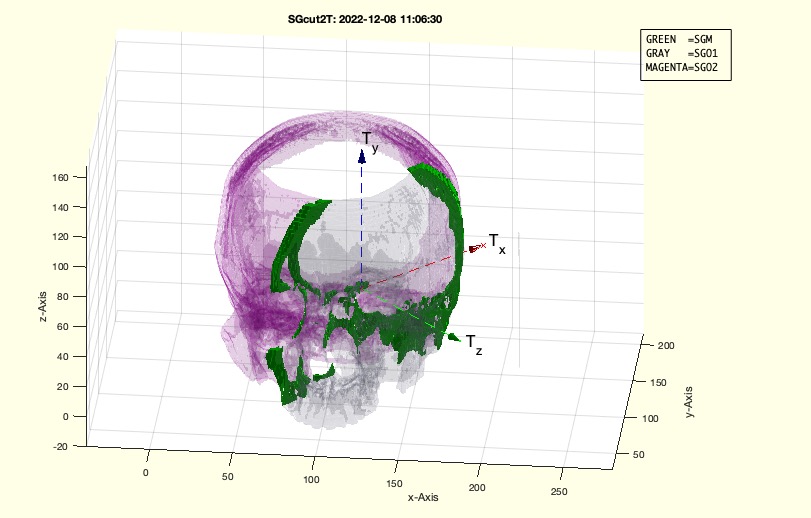 | % SGcut2T(SG,T1,T2,ct) - cuts out the SG that is below frame T1 and frame T2 % (by Tim Lueth, VLFL-Lib, 2022-DEZ-08 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: SGcut, SGcut2, SGcut2TextrudeT, SGcut2fit, SGcutBB, SGcutT, % SGcutT4design, SGcutTA, SGcutTCPL, SGcutTCPLentry, SGcutTbladeangle, % SGcutTcrossblade, SGcutTcylindricblade, SGcutTextrudeT, % SGcutTfischertechnik, SGcutTinsertpins, SGcutend, SGcutrecursivly % % [SGM,SGO1,SGO2]=SGcut2T(SG,[T1,T2,ct]) % === INPUT PARAMETERS === % SG: Solid Geometry % T1: Frame T1 % T2: Frame T2; if numerical scalar; T1 and T2 are symmetrically shifted % from T2 along ez axis % ct: not used yet; % === OUTPUT RESULTS ====== % SGM: Middle Solid (Green) % SGO1: Above frame T1 (Gray) % SGO2: Above frame T2 (Magenta) % % EXAMPLE: % load AIM.mat; VM=V; % [AM,as]=VMresize(VM,[0.5 0.5 0.5],vs); % SG=SGofVMisosurface(AM>1400,as); % mm=mean(SG.VL); VLplot(mm,'r*'); TT=TofPez(mm,[1 -1 0]); % SGcut2T(SG,TT,5); % % See also: SGcut, SGcut2, SGcut2TextrudeT, SGcut2fit, SGcutBB, SGcutT, % SGcutT4design, SGcutTA, SGcutTCPL, SGcutTCPLentry, SGcutTbladeangle, % SGcutTcrossblade, SGcutTcylindricblade, SGcutTextrudeT, % SGcutTfischertechnik, SGcutTinsertpins, SGcutend, SGcutrecursivly % % % Copyright 2022 Tim C. Lueth |
exp_2022_12_05_learncamera(TT)- EXPERIMENT TO SHOW HOW TO MOUNT AN IMAGE IN SPACE |
 | % exp_2022_12_05_learncamera(TT) - EXPERIMENT TO SHOW HOW TO MOUNT AN IMAGE IN SPACE % (by Tim Lueth, VLFL-Lib, 2022-DEZ-06 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 5.2 % % exp_2022_12_05_learncamera([TT]) % === INPUT PARAMETERS === % TT: View Direction of Kamera % % EXAMPLE: % close all; load spine.mat; TT=TofPez([0 0 0],[1 1 0],pi) % % SG=SGsphere(100); SGfigure; SGplotalpha(SG,'w',0.5); % % SG=SGbox(200); SGfigure; SGplotalpha(SG,'w',0.5); % set(gcf,'Color',[1 1 1]); set(gca,'Color',[1 1 1]); grid on; shg; title(''); % h=imwarpT (X,TT,'',true); axis tight; caxis auto; fontsize(24); axis equal; rotate3d on % exp_2022_12_05_learncamera(TT); colormap gray; caxis auto; shg; % % delete(h); h=imwarpT (X,TT,'',true); % % % Copyright 2022 Tim C. Lueth |
isT(T)- returns whether a variable is a HT matrix or a list of HT matrices |
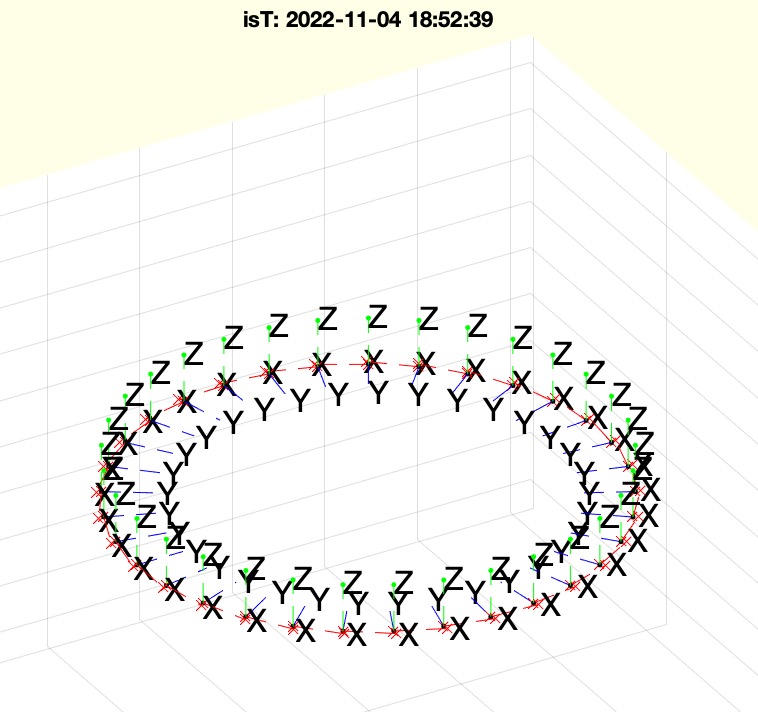 | % isT(T) - returns whether a variable is a HT matrix or a list of HT matrices % (by Tim Lueth, VLFL-Lib, 2022-NOV-04 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 5.2 % % See also: isSG, mat2celldim3, cell2matdim3 % % ii=isT(T) % === INPUT PARAMETERS === % T: 3x3 or 4x4 HT frame or array or cell list % === OUTPUT RESULTS ====== % ii: result true or false % % EXAMPLE: % isT(eye(3)) % isT(eye(4)) % TL=TofPLpath(PLcircle) % isT(TL) % isT(mat2celldim3(TL)) % isT(rot([3,3,3])) % % See also: isSG, mat2celldim3, cell2matdim3 % % % Copyright 2022 Tim C. Lueth |
SGpedestal(F,S)- creates simple solids for pedestals |
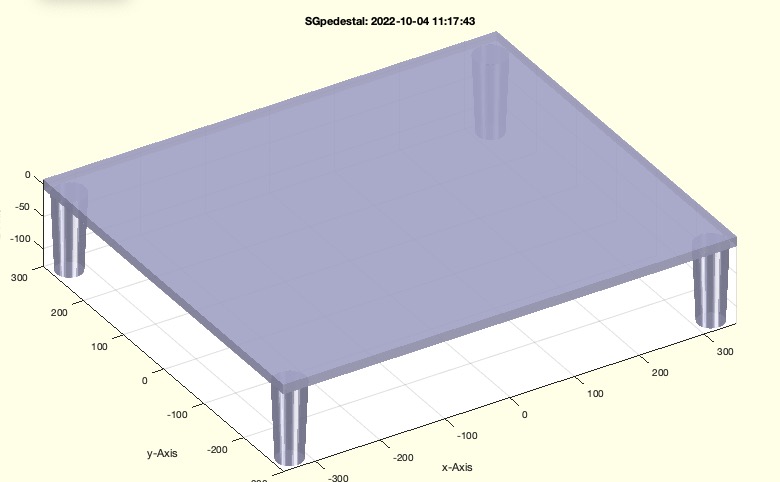 | % SGpedestal(F,S) - creates simple solids for pedestals % (by Tim Lueth, VLFL-Lib, 2022-SEP-18 as class: PARAMETRIC DESIGN) % % It is a fnctn for calculating pedestals under which a robot can perform % its suction-wipe fnctns. (Status of: 2022-09-19) % % Introduced first in SolidGeometry 5.2 % % See also: SGbox, SGconetruncated % % SG=SGpedestal([F,S]) % === INPUT PARAMETERS === % F: Size of plate; default is [900 700 15] % S: Size of stands; default is [120 40 50] % === OUTPUT RESULTS ====== % SG: % % EXAMPLE: % SGpedestal('M'); B=ans; % SGpedestal('L'); A=ans; % SGplotalpha(A); SGplotalpha(B,'','','',A,'left',10,'alignback'); SGplotalpha(B,'','','',A,'right',10,'alignback'); % % % See also: SGbox, SGconetruncated % % % Copyright 2022 Tim C. Lueth |
ageofbirthday(day,refd)- returns tge age in years of a birtday string and an optional reference date string |
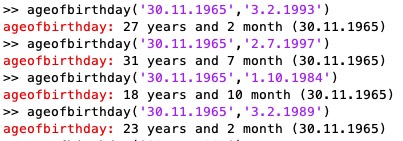 | % ageofbirthday(day,refd) - returns tge age in years of a birtday string and an optional reference date string % (by Tim Lueth, VLFL-Lib, 2022-SEP-02 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.2 % % See also: datenum, datetime, now % % [age,chkd,refd]=ageofbirthday(day,[refd]) % === INPUT PARAMETERS === % day: string of birthday, such as '30.11.1965) % refd: string of refence date, such as {1.6.2016'; default is now % === OUTPUT RESULTS ====== % age: age in years % chkd: numerical value of date % refd: numerical value of reference date % % EXAMPLE: % ageofbirthday('30.11.1965') % ageofbirthday('30.11.1965','1.10.1984') % ageofbirthday('30.11.1965','3.2.1989') % ageofbirthday('30.11.1965','3.2.1993') % ageofbirthday('30.11.1965','2.7.1997') % % See also: datenum, datetime, now % % % Copyright 2022 Tim C. Lueth |
SGcathetertorquer(CCtyp,CAP)- creates different catheter torquers to be actived by SGcathetercapsule |
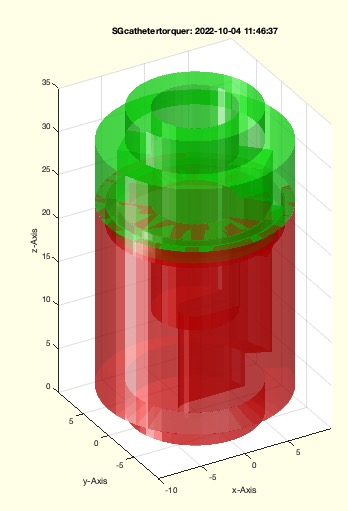 | % SGcathetertorquer(CCtyp,CAP) - creates different catheter torquers to be actived by SGcathetercapsule % (by Tim Lueth, VLFL-Lib, 2022-AUG-18 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGcathetercapsule, exp_2022_08_14_capsnew.m % % [SGA,SGB]=SGcathetertorquer([CCtyp,CAP]) % === INPUT PARAMETERS === % CCtyp: such as 'MANDRIN', or 'MICRO2.8F.018' % CAP: size of roller; default is [35 20 14 3 6] mm % === OUTPUT RESULTS ====== % SGA: Front side (Catheter) including Frames % SGB: Back side (Luerlock) including Frames % % EXAMPLE: % SGcathetertorquer('SHEAT'); % SGcathetertorquer('MANDRIN') % SGcathetertorquer('CORDIS4F.038'); % SGcathetertorquer('CORDIS5F.035'); % SGcathetertorquer('MICRO2.8F.018'); % % % See also: SGcathetercapsule, exp_2022_08_14_capsnew.m % % % Copyright 2022 Tim C. Lueth |
SGdrillnotch (T,M)- sets a simple drilling notch on top of a surface |
 | % SGdrillnotch (T,M) - sets a simple drilling notch on top of a surface % (by Tim Lueth, VLFL-Lib, 2022-AUG-10 as class: PARAMETRIC DESIGN) % % Sometimes it is easier to drill a hole in a solid object using a % drilling machine than to design a hole, since the exat diameter is % unkown or flexible. In this cases you would need a drilling notch on % the surface of the solid for a precise positioning of the drill's tip. % (Status of: 2022-11-04) % % Introduced first in SolidGeometry 5.2 % % See also: SGTdrill, SGbox % % SGdrillnotch([T,M]) % === INPUT PARAMETERS === % T: Frame or cell{Solid, Framename} % M: metric diameter of the notch % % EXAMPLE: % SGdrillnotch(eye(4),10) % SGdrillnotch({SGbox,'X+'},3) % % See also: SGTdrill, SGbox % % % Copyright 2022 Tim C. Lueth |
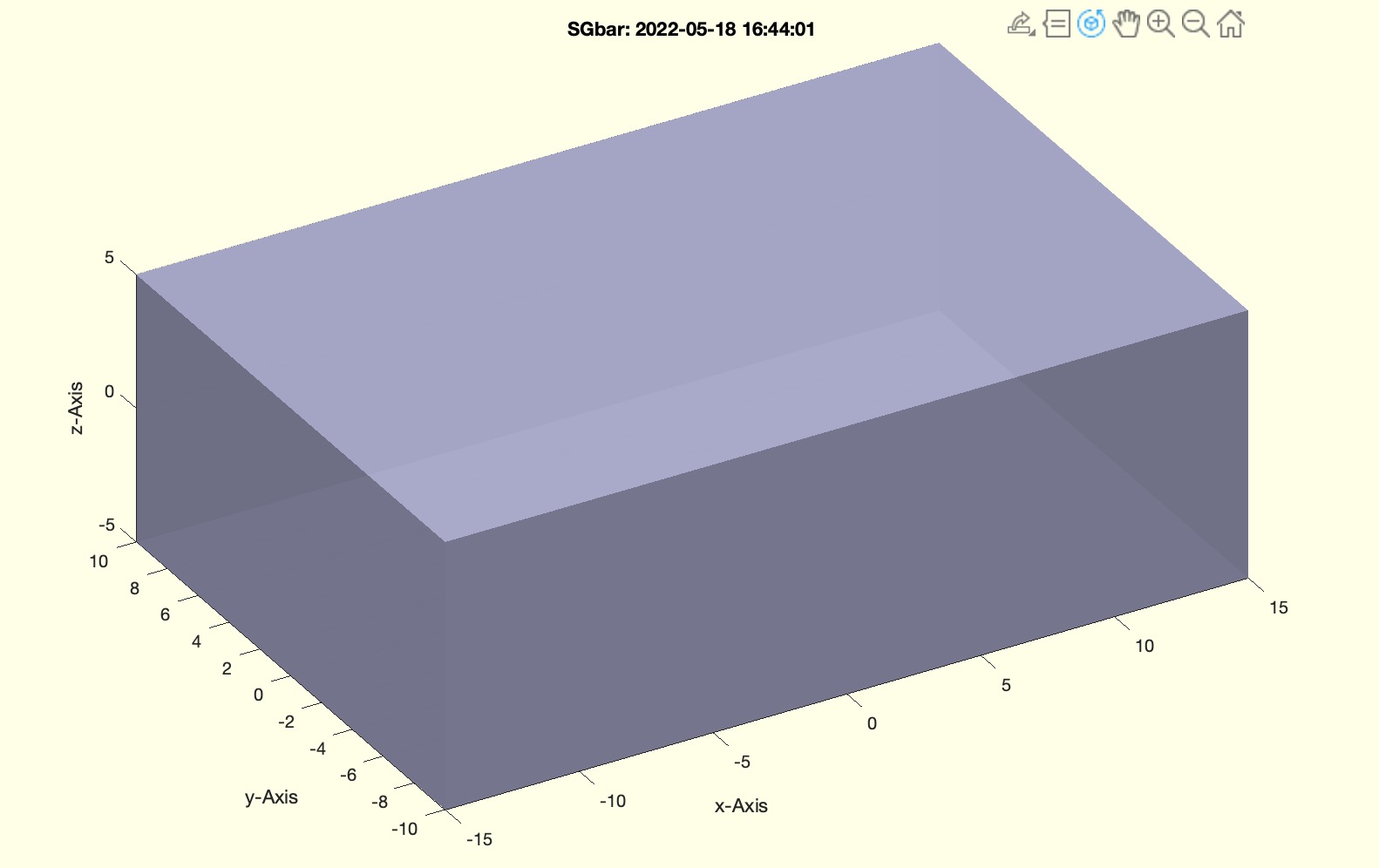
SGlevelheight(SG,mmz,ax)- changes the height of a solid depending on the x/y coordinates |
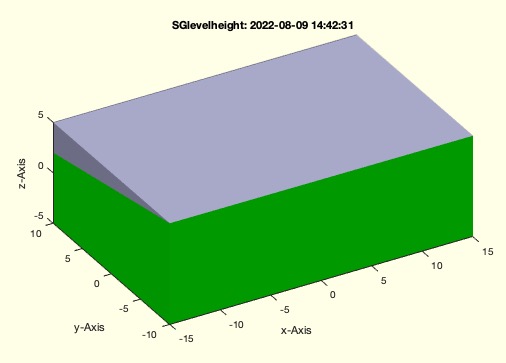 | % SGlevelheight(SG,mmz,ax) - changes the height of a solid depending on the x/y coordinates % (by Tim Lueth, VLFL-Lib, 2022-AUG-09 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: SGbending, GofCPLzdelaunayGrid, SGofCPLsphere, CPLaddauxpoints % % SG=SGlevelheight(SG,[mmz,ax]) % === INPUT PARAMETERS === % SG: Solid Geometry % mmz: [minvalue maxvalue maxheight]; default is [-inf inf nan] nan == no % change % ax: height-axis; dimension-axis]; default is [z y] % === OUTPUT RESULTS ====== % SG: modified Solid % % EXAMPLE: % SGlevelheight(SGbox,[-5 inf 2],'zx') % SGlevelheight(SGbox,[-5 inf 2],'zy') % % See also: SGbending, GofCPLzdelaunayGrid, SGofCPLsphere, CPLaddauxpoints % % % Copyright 2022 Tim C. Lueth |
SGgyroid(R,w,D)- creates a gyroid shape solid |
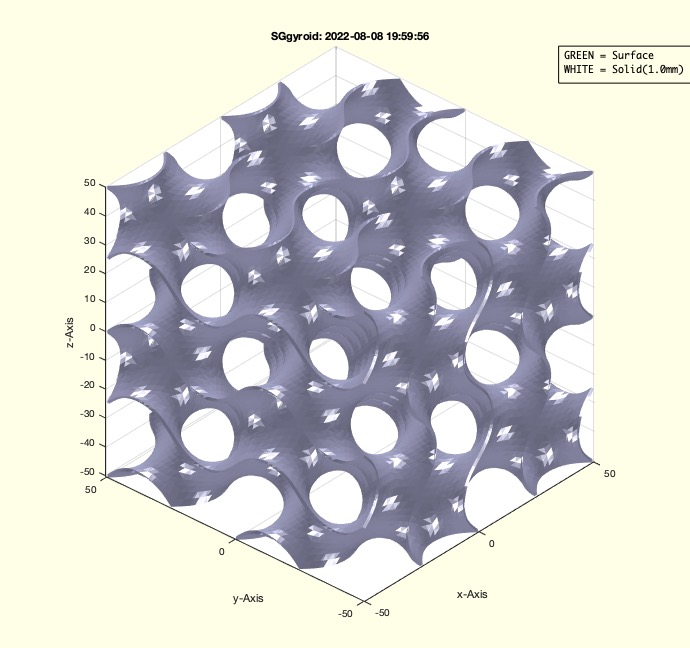 | % SGgyroid(R,w,D) - creates a gyroid shape solid % (by Brian Li & Tim Lueth, VLFL-Lib, 2022-AUG-08 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: SGmeshground, VLFLweave % % SG=SGgyroid([R,w,D]) % === INPUT PARAMETERS === % R: Cubic size % w: angle; default is 4*pi % D: wall Thicknessl default is 0 % === OUTPUT RESULTS ====== % SG: Gyroid solid % % See also: SGmeshground, VLFLweave % % % Copyright 2022 Tim C. Lueth |
dbcheck(vari)- checks wether a variable is stored in global workspace and listed in SGvar |
 | % dbcheck(vari) - checks wether a variable is stored in global workspace and listed in SGvar % (by Tim Lueth, VLFL-Lib, 2022-AUG-01 as class: AUXILIARY PROCEDURES) % % returns 1 if variable existst with the same value as paremeter 2 % returns 0 if variable existst but with a different value % returns -1 if variable does not exist at all (Status of: 2022-08-01) % % Introduced first in SolidGeometry 5.2 % % See also: SGvar, dbload, dbsave % % ri=dbcheck(vari) % === INPUT PARAMETERS === % vari: variable % === OUTPUT RESULTS ====== % ri: true if variable is unchanged or not exisiting; false if different % % See also: SGvar, dbload, dbsave % % % Copyright 2022 Tim C. Lueth |
whoSG(vari,desc)- SG list of global variables stored in the work space |
 | % whoSG(vari,desc) - SG list of global variables stored in the work space % (by Tim Lueth, VLFL-Lib, 2022-JUL-31 as class: AUXILIARY PROCEDURES) % % the fnctn shows which variables were stored in the global workspace % using dbsave or dbplot, and in which code line those creation took % place (Status of: 2022-10-04) % % Introduced first in SolidGeometry 5.2 % % See also: dbcheck, dbload, dbsave, SGvar % % ri=whoSG(vari,desc) % === INPUT PARAMETERS === % vari: variable in global workspace % desc: description of variable % === OUTPUT RESULTS ====== % ri: returns true or false if not existing or existing in global % SG_variables % % EXAMPLE: % % % See also: dbcheck, dbload, dbsave, SGvar % % % Copyright 2022 Tim C. Lueth |
dbload (var2base)- imports a workspace varibale into a fnct |
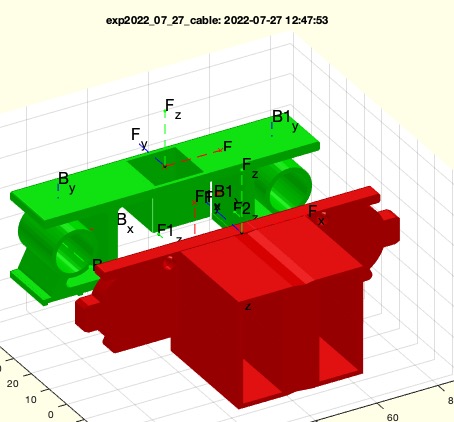 | % dbload (var2base) - imports a workspace varibale into a fnct % (by Tim Lueth, VLFL-Lib, 2022-JUL-27 as class: AUXILIARY PROCEDURES) % % sometimes it makes sense in time consuming fnctn to use the workspace % to store variables for debugging. It also makes senso to read them in % into fnctns during development to develop modules independently and % merge them later (Status of: 2022-07-27) % % Introduced first in SolidGeometry 5.2 % % See also: dbsave, dbprintf, dbreturn, dbexit, dbprintmode % % dbload([var2base]) % === INPUT PARAMETERS === % var2base: string list of variables to be read in from the global % workspace % % EXAMPLE: % A=4; % fnction test_dbload % dbload('A','B') % A % B % end % test_dbload % % See also: dbsave, dbprintf, dbreturn, dbexit, dbprintmode % % % Copyright 2022 Tim C. Lueth |
gcfSG- in contrast to gcf, this fnct returns empty if there is no open window |
 | % gcfSG - in contrast to gcf, this fnct returns empty if there is no open window % (by MATLAB-CENTRAL, VLFL-Lib, 2022-JUL-19 as class: VISUALIZATION) % % See also: gcf % % h=gcfSG % === OUTPUT RESULTS ====== % h: handle or empty % % EXAMPLE: % close all % gcfSG % % See also: gcf % |
CVLofCPL(CPL,T,d)- returns a CVL from a CPL |
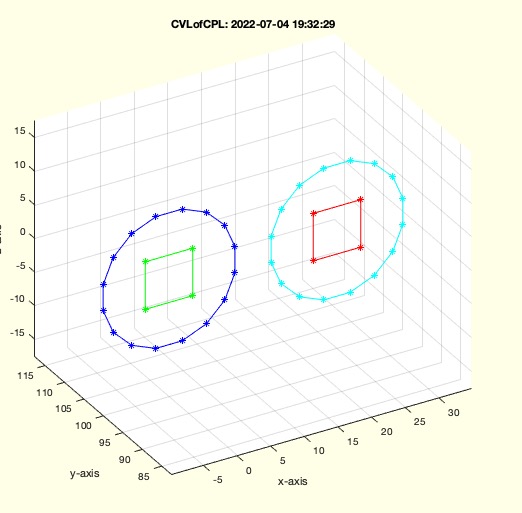 | % CVLofCPL(CPL,T,d) - returns a CVL from a CPL % (by Tim Lueth, VLFL-Lib, 2022-JUL-04 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: SGofCPLextrude, VLaddz % % CVL=CVLofCPL(CPL,[T,d]) % === INPUT PARAMETERS === % CPL: Contour % T: direction such as 'x' or HT matrix % d: distance from origin; default is 0 % === OUTPUT RESULTS ====== % CVL: CVL % % EXAMPLE: % CVLofCPL(CPLsample(12),'y',100); % % See also: SGofCPLextrude, VLaddz % % % Copyright 2022 Tim C. Lueth |
CATIAbackground(iscat)- just switches to colors similar to CATIA |
 | % CATIAbackground(iscat) - just switches to colors similar to CATIA % (by Tim Lueth, VLFL-Lib, 2022-JUL-04 as class: USER INTERFACE) % % In use since 2012 i app_2012_11_09 , bnut now extracted as fnctn % (Status of: 2022-07-21) % % Introduced first in SolidGeometry 5.2 % % See also: app_2012_11_09 % % CATIAbackground([iscat]) % === INPUT PARAMETERS === % iscat: true or false; toggles if not used % % EXAMPLE: % SGsample(1:4) % CATIAbackground % % See also: app_2012_11_09 % % % Copyright 2022 Tim C. Lueth |
CPLunionreplace(CPLA,CPLB,relparam,"type","ol")- countour union after a subtraction of a bounding box or convex hull |
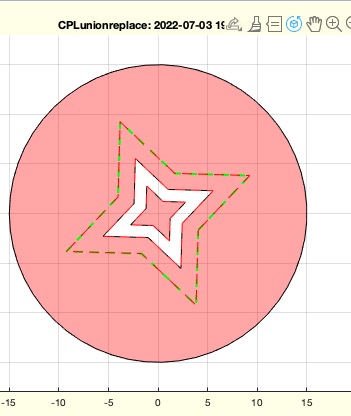 | % CPLunionreplace(CPLA,CPLB,relparam,"type","ol") - countour union after a subtraction of a bounding box or convex hull % (by Tim Lueth, VLFL-Lib, 2022-JUL-03 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: SGunionreplace, CPLunion, CPLadd, CPLbool, CPLsubtract, % CPLintersect, CPLxor, CPLconcat % % CPL=CPLunionreplace(CPLA,CPLB,[relparam,"type","ol"]) % === INPUT PARAMETERS === % CPLA: Contour A % CPLB: Contour B % relparam: relative parameter to adjust position % "type": bb, convexhull, delaunay, fillgap % "ol": optional overl; default is 0 % === OUTPUT RESULTS ====== % CPL: Final contour % % EXAMPLE: % CPLunionreplace(PLcircle(30),CPLsample(13)) % CPLunionreplace(PLcircle(30),CPLsample(13),'type','bb') % CPLunionreplace(PLcircle(30),CPLsample(13),'type','convexhull') % CPLunionreplace(PLcircle(30),CPLsample(13),'type','delaunay') % CPLunionreplace(PLcircle(30),CPLsample(13),'aligntop','type','fillgap') % % % See also: SGunionreplace, CPLunion, CPLadd, CPLbool, CPLsubtract, % CPLintersect, CPLxor, CPLconcat % % % Copyright 2022 Tim C. Lueth |
CPLselectbynearestP(CPL,PL,aux)- returns an index list to select by the neareat Points/CPLs |
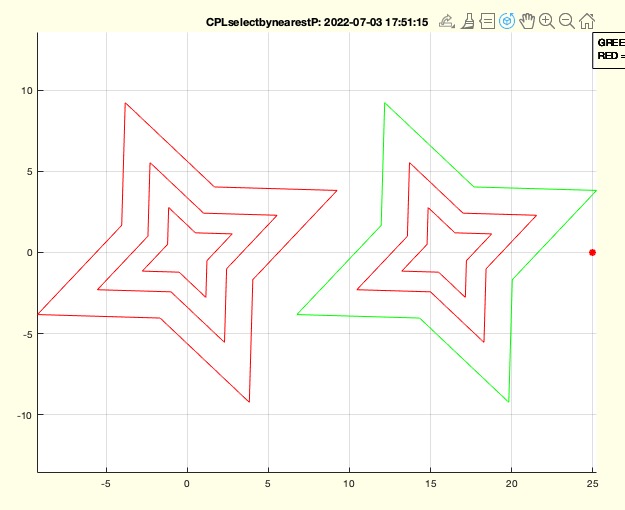 | % CPLselectbynearestP(CPL,PL,aux) - returns an index list to select by the neareat Points/CPLs % (by Tim Lueth, VLFL-Lib, 2022-JUL-02 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: crosstest, insideCPL, insideCPS, isInteriorofCPL, insideC, % CPLselectbyP % % [ind,ddd]=CPLselectbynearestP(CPL,PL,[aux]) % === INPUT PARAMETERS === % CPL: CPL % PL: Single point to check % aux: density of auxiliary points; default is 0.1 % === OUTPUT RESULTS ====== % ind: index list % ddd: distance to nearest point % % EXAMPLE: % CPLselectbynearestP(CPLsample(14),[0 0 0]) % CPLselectbynearestP(CPLsample(14),[5 0 0]) % CPLselectbynearestP(CPLsample(14),[5 0 ;10 -3]) % CPLselectbynearestP(CPLsample(14),[25 0]) % % See also: crosstest, insideCPL, insideCPS, isInteriorofCPL, insideC, % CPLselectbyP % % % Copyright 2022 Tim C. Lueth |
PLtrapezoid(b,h)- returns a trapezoid shape liek the stern of a slalom water ski |
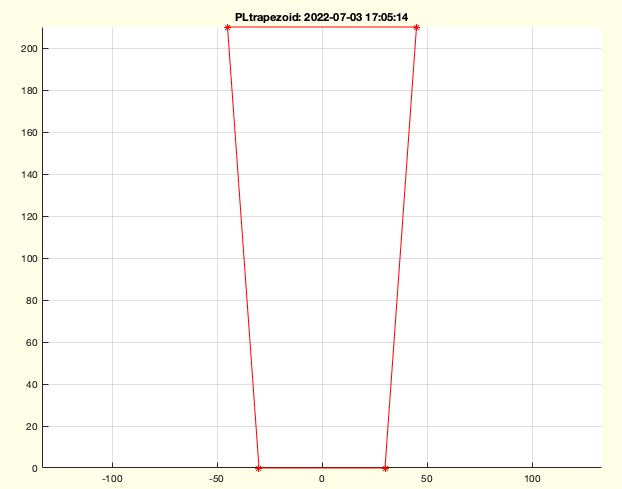 | % PLtrapezoid(b,h) - returns a trapezoid shape liek the stern of a slalom water ski % (by Tim Lueth, VLFL-Lib, 2022-JUL-02 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: PLlemo, PLcircle, PLcirctrapezoid % % PL=PLtrapezoid([b,h]) % === INPUT PARAMETERS === % b: base and top default is [60 90] % h: height of trapezoid; default is 210 % === OUTPUT RESULTS ====== % PL: Point list % % EXAMPLE: % PLtrapezoid([60 90],210) % % See also: PLlemo, PLcircle, PLcirctrapezoid % % % Copyright 2022 Tim C. Lueth |
SGslalomshoes(LL,SkiS,Rail,FinS,Foil,"cover")- Finn-Foil-Protector for Slalomski |
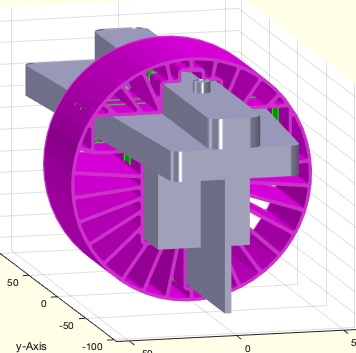 | % SGslalomshoes(LL,SkiS,Rail,FinS,Foil,"cover") - Finn-Foil-Protector for Slalomski % (by Tim Lueth, VLFL-Lib, 2022-JUL-02 as class: MODELING PROCEDURES) % % Designed for % European Vice-Campion Trickski Sigita Rosovaite and % Waterski-Club WSC Kiefersfelden Rosenheim e.V. and % Waterski-Club WSV Friedberg (Status of: 2022-07-03) % % Introduced first in SolidGeometry 5.2 % % See also: CPLradialhatch % % [SGall,CPL3,CPL2,CPL4]=SGslalomshoes([LL,SkiS,Rail,FinS,Foil,"cover"]) % === INPUT PARAMETERS === % LL: length of proptector ; default is 50mm % SkiS: size of Ski stern; default is [60 90 210 14] % Rail: size of rail; default is [25 210 14] % FinS: size of fin; default is [3 18 65] % Foil: size of foil protection box; default is [43 43 43] % "cover": if true; the tube gets an floor cover % === OUTPUT RESULTS ====== % SGall: Solid Geometry to print % CPL3: Contour % CPL2: contour of tube % CPL4: contour of connector bars % % EXAMPLE: % SGslalomshoes % SGslalomshoes([10 3 22]) % % See also: CPLradialhatch % % % Copyright 2022 Tim C. Lueth |
PLlemo(d,sl)- returns the contour of a insertion hole for a LEMO plug/socket |
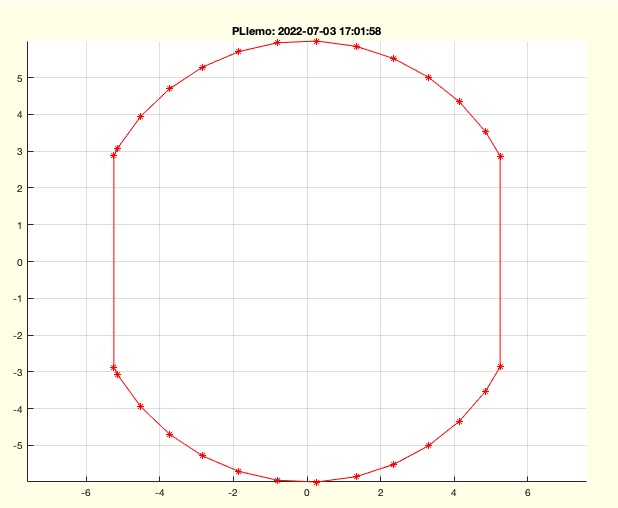 | % PLlemo(d,sl) - returns the contour of a insertion hole for a LEMO plug/socket % (by Tim Lueth, VLFL-Lib, 2022-JUN-30 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: PLcircle, PLcirctrapezoid, PLtrapezoid % % CPL=PLlemo([d,sl]) % === INPUT PARAMETERS === % d: Outer Diameter and inner diameter; default is [12 10.5] % sl: slot; default is 0 % === OUTPUT RESULTS ====== % CPL: Contour of hole % % Additional Hyperlinks: % Lemo FGG % % EXAMPLE: % PLcircle; PL=ans; % % See also: PLcircle, PLcirctrapezoid, PLtrapezoid % % % Copyright 2022 Tim C. Lueth |
SGboxstructure(siz,dim,typ)- creates a box based on SGbarstructure |
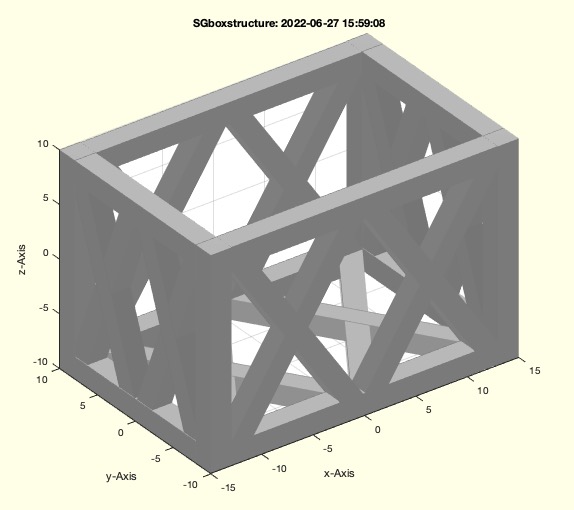 | % SGboxstructure(siz,dim,typ) - creates a box based on SGbarstructure % (by Tim Lueth, VLFL-Lib, 2022-JUN-27 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGbarstructure % % SG=SGboxstructure([siz,dim,typ]) % === INPUT PARAMETERS === % siz: [x y z] % dim: [bx by bz] % typ: 'xzzxxo' % === OUTPUT RESULTS ====== % SG: Box as bar stucture % % EXAMPLE: % SGboxstructure([30 20 20],[1 1 1],'oooxxx') % % See also: SGbarstructure % % % Copyright 2022 Tim C. Lueth |
SGbarstructure(siz,bh,typ,alp)- creates rectangle as bar structure |
 | % SGbarstructure(siz,bh,typ,alp) - creates rectangle as bar structure % (by Tim Lueth, VLFL-Lib, 2022-JUN-27 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGboxstructure % % SG=SGbarstructure([siz,bh,typ,alp]) % === INPUT PARAMETERS === % siz: [x y] % bh: [db dh] % typ: 'o' or 'z' or 'x'; default is 'x' % alp: angle of cross; default is 51 degree % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGbarstructure([20 10],1,'o') % SGbarstructure([20 10],1,'z') % SGbarstructure([20 10],1,'x') % % See also: SGboxstructure % % % Copyright 2022 Tim C. Lueth |
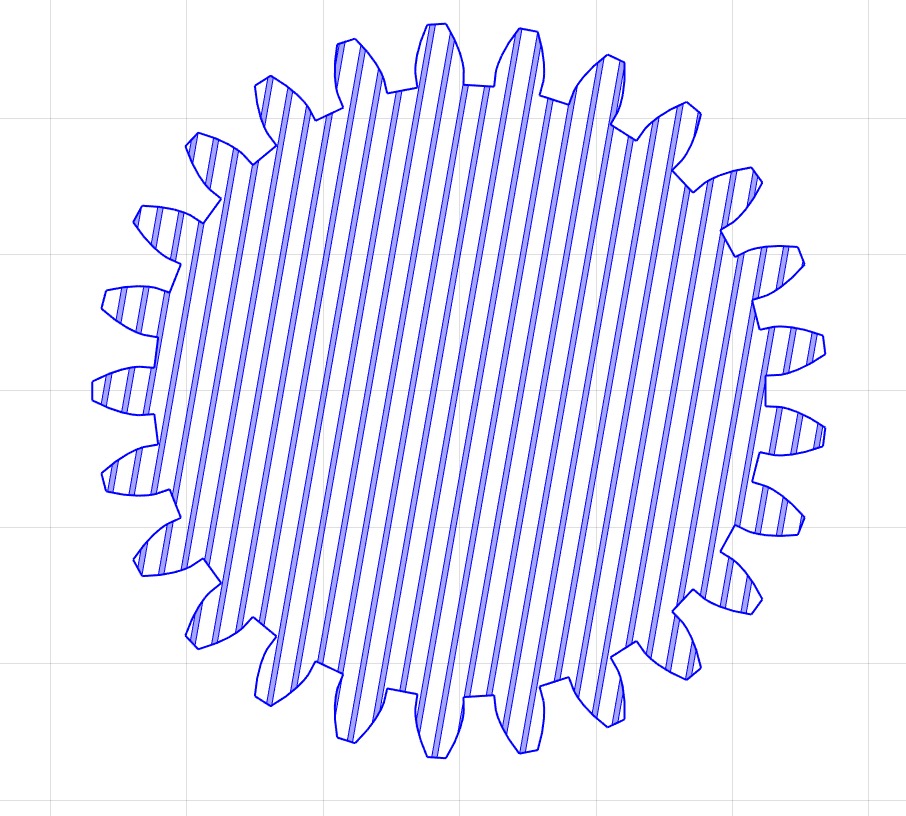
SGofCPLhatch(CPL,d,a,zz,"cross")- creates a solid using CPLhatch |
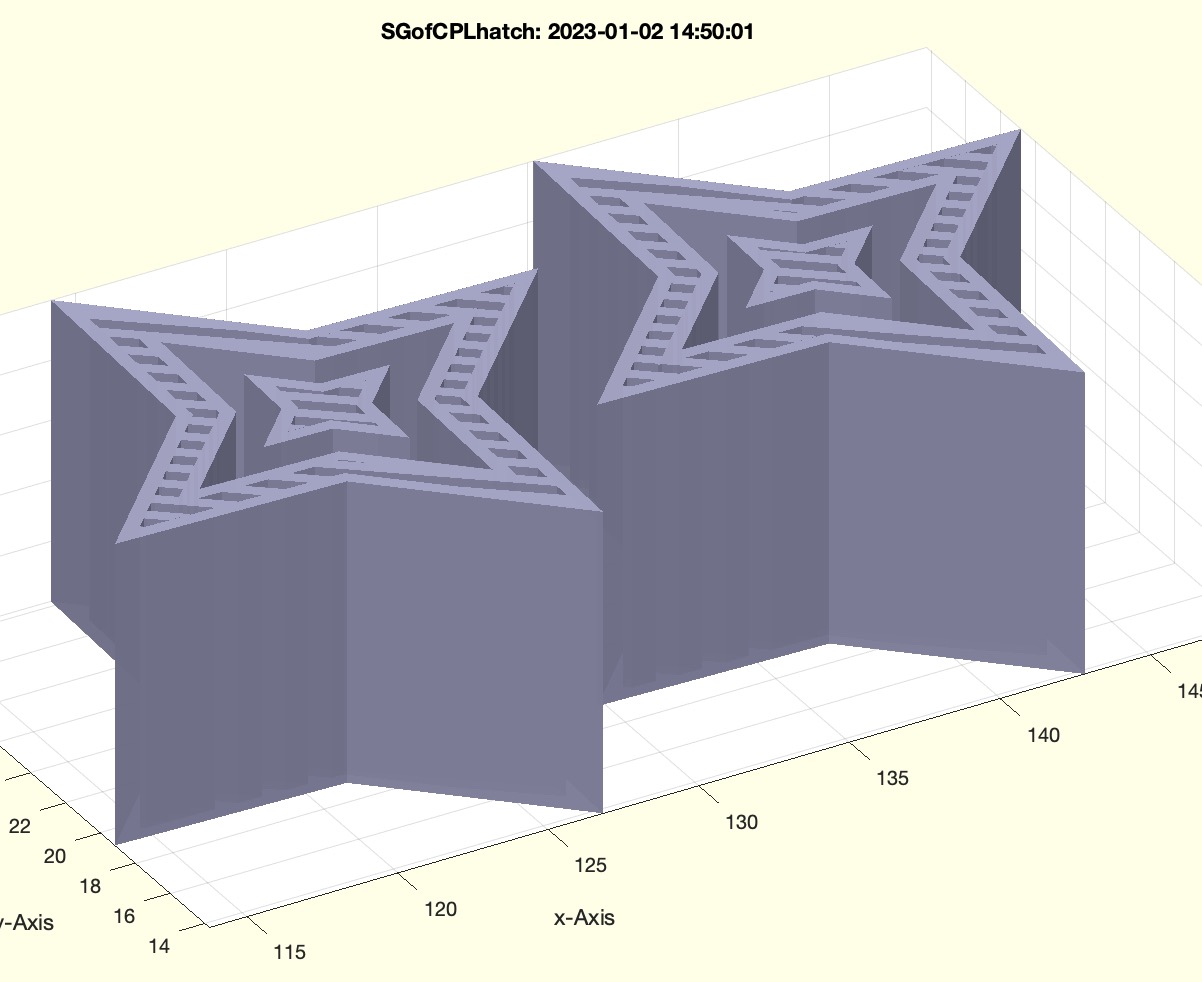 | % SGofCPLhatch(CPL,d,a,zz,"cross") - creates a solid using CPLhatch % (by Tim Lueth, VLFL-Lib, 2022-JUN-27 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: CPLhatch, SGofCPLz, CPLradialhatch % % SG=SGofCPLhatch([CPL,d,a,zz,"cross"]) % === INPUT PARAMETERS === % CPL: Contour % d: [thickness and distance of hatch bars] % a: angle of hatch or [hatch crosshatch] angles; default is 51 degree % zz: height of solid % "cross": if used; there will be crossed angle=[a a+90] % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGofCPLhatch(CPLsample(14)+[123 23],.4,''); % SGofCPLhatch(CPLsample(14)+[123 23],.2,''); % % % See also: CPLhatch, SGofCPLz, CPLradialhatch % % % Copyright 2022-2023 Tim C. Lueth |
SGcmd(par)- Shortcut for SGofCPLcommand but supports also sprintftext format |
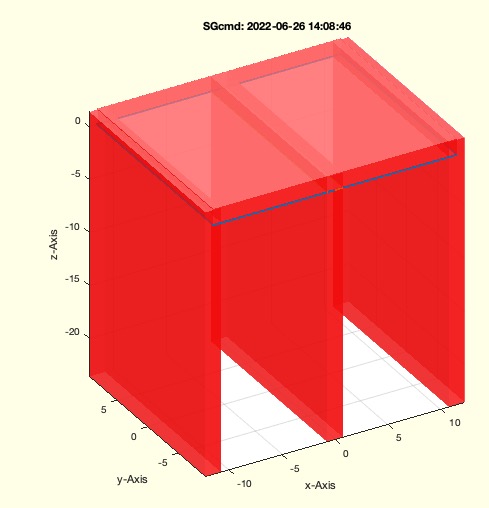 | % SGcmd(par) - Shortcut for SGofCPLcommand but supports also sprintftext format % (by Tim Lueth, VLFL-Lib, 2022-JUN-26 as class: PARAMETRIC DESIGN) % % if the 1st argument is a cell, sprintftext is used to process the 1st % argument (Status of: 2022-06-26) % % Introduced first in SolidGeometry 5.2 % % See also: SGofCPLcommand, sprintftext % % [SG,CPLO,warn,ocstr,macrol,STAT]=SGcmd([par]) % === INPUT PARAMETERS === % par: see SGofCPLcommand % === OUTPUT RESULTS ====== % SG: see SGofCPLcommand % CPLO: see SGofCPLcommand % warn: see SGofCPLcommand % ocstr: see SGofCPLcommand % macrol: see SGofCPLcommand % STAT: SGofCPLcommand % % EXAMPLE: % SGcmd('b 23 19 , h 1.5, enter, b 1.5 19,h 25, dups 3 1 1 10, rel center, rel aligntop -0.1, cat'); % STRING FORMAT % % SGcmd({'b 23 19 , h 1.5, enter, b 1.5 19,h 25, dups ',[3 1 1 10],', rel center, rel aligntop -0.1, cat'}); CELL FORMAT ==> sprintftext % % See also: SGofCPLcommand, sprintftext % % % Copyright 2022 Tim C. Lueth |
SGdesignSupplement2connectSG(SG,T,wt,ra,zz)- fills in a solid block to connect the surfaces of SG |
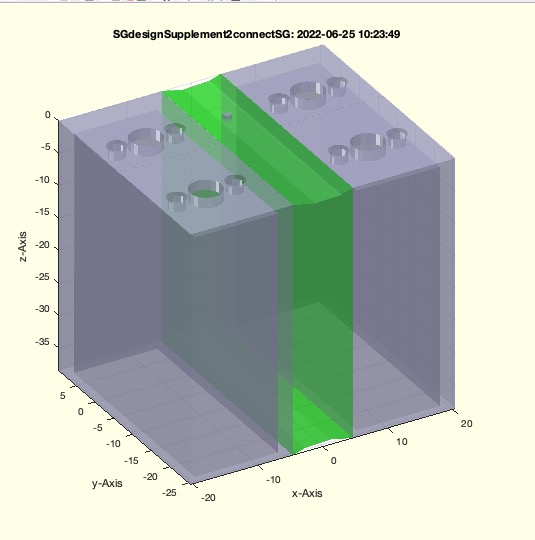 | % SGdesignSupplement2connectSG(SG,T,wt,ra,zz) - fills in a solid block to connect the surfaces of SG % (by Tim Lueth, VLFL-Lib, 2022-JUN-25 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignSupplement2connect2SG % % [SGN,SG2]=SGdesignSupplement2connectSG(SG,[T,wt,ra,zz]) % === INPUT PARAMETERS === % SG: Solid Geometry % T: Frame or z-axis used for 2.5 projection solid % wt: wall thickness for fillgap % ra: radius for radial edges % zz: height ; default is [zmin zmax] % === OUTPUT RESULTS ====== % SGN: Final Solid % SG2: Just filling block solid % % % EXAMPLE: SGconcat(SGbox,SGtransP(SGbox,[0 30 0])); SG=ans; % SGdesignSupplement2connectSG(SG,'z',10,5) % SGdesignSupplement2connectSG(SG,'x',10,5) % % See also: SGdesignSupplement2connect2SG % % % Copyright 2022 Tim C. Lueth |
SGunionreplace(A,B,relparam,"ol")- adds a solid after removing the bounding box of the solid |
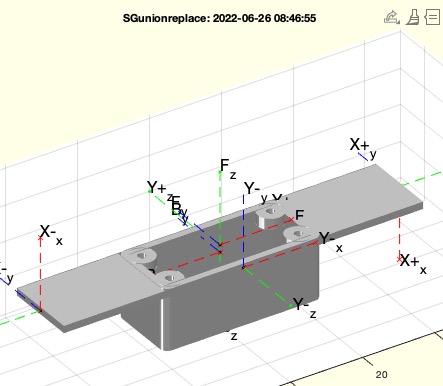 | % SGunionreplace(A,B,relparam,"ol") - adds a solid after removing the bounding box of the solid % (by Tim Lueth, VLFL-Lib, 2022-JUN-24 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGbool, SGtransrelSG, SGboolh, SGintersect, SGsubtract, % SGxor, SGconcat, SGsupplement, SGreplace % % SG=SGunionreplace(A,B,[relparam,"ol"]) % === INPUT PARAMETERS === % A: Solid A % B: Solid to unite after subtracting the bound box % relparam: relative arrangement parameter % "ol": option overlap parameter default is [0.1 0.1 0.1] % === OUTPUT RESULTS ====== % SG: Modified Solid A % % EXAMPLE: % A=SGbox([100 20 2]); [B,C]=SGboxbolted([40 16 15]); B=SGTsetBFsimple(B); C=SGTsetBFsimple(C); % SGunionreplace(A,B,'matchT',{'F','F',TofP([0 0 .1])},'ol',0.1); % SGunionreplace(A,C,'matchT',{'F','F',TofP([0 0 0])},'ol',[0.1 0.1 0]); % % See also: SGbool, SGtransrelSG, SGboolh, SGintersect, SGsubtract, % SGxor, SGconcat, SGsupplement, SGreplace % % % Copyright 2022 Tim C. Lueth |
exp_2022_06_20_FDMcompare- comparison of printing time |
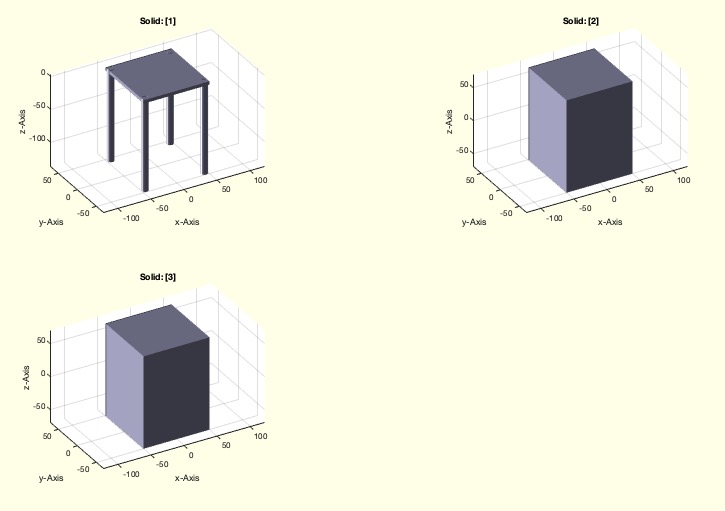 | % exp_2022_06_20_FDMcompare - comparison of printing time % (by Tim Lueth, VLFL-Lib, 2022-JUN-20 as class: EXPERIMENTS) % % printing time is only 15% smaller and material is 25 % if the part is % not printed solid from ground % Printing time % 11:57 with legs % 12:52 als full block % 11:51 with rhombus (Status of: 2022-06-20) % % Introduced first in SolidGeometry 5.2 % % exp_2022_06_20_FDMcompare % % % Copyright 2022 Tim C. Lueth |
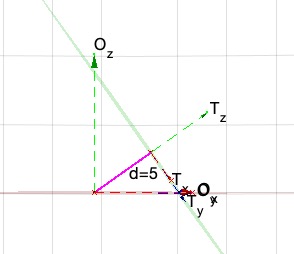
hesseplaneofT(T,T0)- Hessennormalform of T's xy plane |
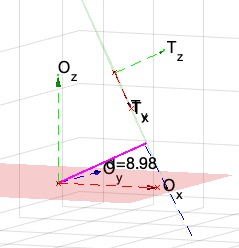 | % hesseplaneofT(T,T0) - Hessennormalform of T's xy plane % (by Tim Lueth, VLFL-Lib, 2022-JUN-19 as class: ANALYTICAL GEOMETRY) % % d=planedistanceofT(T,[0 0 0]) % The Hesse Normal Form to describe a plane in 3D is a combination of the % ez vector of the plane and the distance from the world origin to the % plane in the direction of the normal vector. (Status of: 2022-06-19) % % Introduced first in SolidGeometry 5.2 % % See also: planedistanceofT % % [dh,ez,XL]=hesseplaneofT(T,[T0]) % === INPUT PARAMETERS === % T: HT Matrix % T0: reference plane default is eye(4) % === OUTPUT RESULTS ====== % dh: hesse distance to plane % ez: ez vector of T % XL: PL that defined the cutting edge % % EXAMPLE: % T=TofPez([4 4 0],[2 +1 1]), hesseplaneofT(T) % T2=T; T2(1:3,4)=T2(1:3,4)+2*T2(1:3,1)+40*T2(1:3,2); hesseplane(T2) % hesseplaneofT(T,T2) % % See also: planedistanceofT % % % Copyright 2022 Tim C. Lueth |
Tofhesseplane(d,ez,T0)- returns an HT amtrix from a hesse normal form of a plane |
 | % Tofhesseplane(d,ez,T0) - returns an HT amtrix from a hesse normal form of a plane % (by Tim Lueth, VLFL-Lib, 2022-JUN-19 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 5.2 % % See also: TofPez, hesseplaneofT % % T=Tofhesseplane([d,ez,T0]) % === INPUT PARAMETERS === % d: distance to plane % ez: ez vector of plane % T0: optional relative plane that is used for d and ez; default is eye(4) % === OUTPUT RESULTS ====== % T: HT matrix of plane % % EXAMPLE: % Tofhesseplane(5,[0.8 0.4 0.4]) % relative to T=eye(4) % Tofhesseplane(5,[1 1 1], TofPez([0 0 -10],[0 0 1])) % with respect to a plane at [0 0 -10] % % See also: TofPez, hesseplaneofT % % % Copyright 2022 Tim C. Lueth |
SGhollowrhombus(SG,WNA);- creates a hollow soild for FDM printer |
 | % SGhollowrhombus(SG,WNA); - creates a hollow soild for FDM printer % (by Tim Lueth, VLFL-Lib, 2022-JUN-19 as class: AUTOMATIC DESIGN) % % It makes almost no sense since printing time and material use seem to % be very similar (90%) even in case of small objects. % If the angle is larger than 50 degree most FDM printer can print hollow % structures without support structures (Status of: 2022-06-19) % % Introduced first in SolidGeometry 5.2 % % See also: SGhollowshell, SGhollowsolid % % SG=SGhollowrhombus(SG,[WNA]); % === INPUT PARAMETERS === % SG: Solid Geometry % WNA: [wall thickness, edge number, angle in degree]; default is [1.2 0 % 55] % === OUTPUT RESULTS ====== % SG: Solid with included rhombus to save material and printing time % % EXAMPLE: % SGhollowrhombus(SGbox([10 10 40])) % SGhollowrhombus(SGsphere(30,'','','',30,60)) % % See also: SGhollowshell, SGhollowsolid % % % Copyright 2022 Tim C. Lueth |
SGselect(SG,comsequ,"debug")- selects solids from a cell list using a command language |
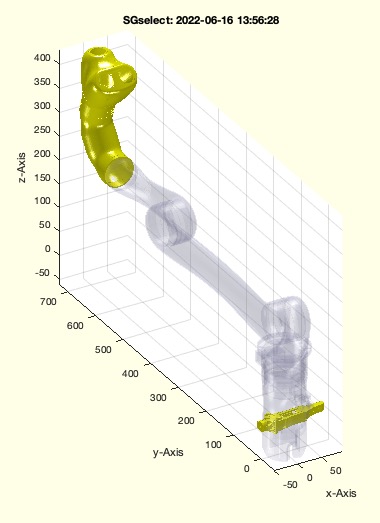 | % SGselect(SG,comsequ,"debug") - selects solids from a cell list using a command language % (by Tim Lueth, VLFL-Lib, 2022-JUN-16 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: SGseparate % % SG=SGselect(SG,[comsequ,"debug"]) % === INPUT PARAMETERS === % SG: cell list of solids % comsequ: sequence of commands such as 'maxdim, mindim, maxbbvol, % minbbvol, 'zmax','xmax','ymax', 'zmin','xmin','ymin' % "debug": if used the selection is shown step by step % === OUTPUT RESULTS ====== % SG: cell ist of selected solids % % EXAMPLE: % loadweb JACO_robot.mat % SGselect(JACO,'mindim',1:4) % SGselect(JACO,'mindim',1:4,'maxbbvol') % SGselect(JACO,'mindim',1:4,'minbbvol') % SGselect(JACO,'mindim',1:4,'zmin','debug') % % See also: SGseparate % % % Copyright 2022 Tim C. Lueth |
SGlemoFAGEGG- Plug and socket for the LEMO FAG EGG family |
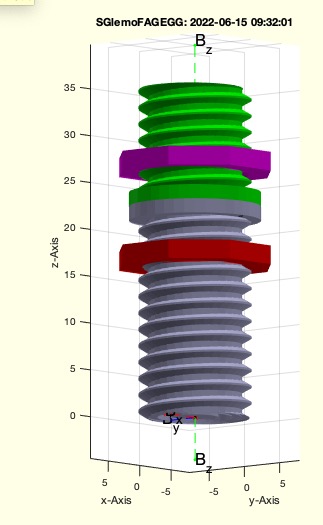 | % SGlemoFAGEGG - Plug and socket for the LEMO FAG EGG family % (by Tim Lueth, VLFL-Lib, 2022-JUN-15 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGDIN912 % % [FAG,EGG]=SGlemoFAGEGG % === OUTPUT RESULTS ====== % FAG: Plug % EGG: Socket % % Additional Hyperlinks: % Lemo-Connectors % % EXAMPLE: % [FAG,EGG]=SGlemoFAGEGG; SGbox; B=ans; % SGtransrelSG(FAG,B,'alignT',{'C','F'}) % SGtransrelSG(EGG,B,'alignT',{'C','F'}) % % See also: SGDIN912 % % % Copyright 2022 Tim C. Lueth |
Ttransrel(T,comsequ,"debug")- language based fnct for spatial arrangement of frames |
 | % Ttransrel(T,comsequ,"debug") - language based fnct for spatial arrangement of frames % (by Tim Lueth, VLFL-Lib, 2022-JUN-15 as class: KINEMATICS AND FRAMES) % % important language concept. First started as ToftransrelSG in 2020-12-12 % currently supported is % 'rotz, roty, 'flip','flipy', rotx, transz, transy, transx, attachz' % % SGtransrelSG, CPLtransrelCPL, Ttransrel % ==> create movements relative to another class instance % % SGtransrelT, CPLtransrelT % ==> make movements of relative to TA into relative to TB % % Tofchar and TofPez('',ezofchar()) % ==> create frames (Status of: 2022-06-29) % % Introduced first in SolidGeometry 5.2 % % See also: SGtransrelSG, CPLtransrelCPL, Tofchar, ezofchar % % [T,k]=Ttransrel([T,comsequ,"debug"]) % === INPUT PARAMETERS === % T: Frame to translate/rotate % comsequ: commandsequence such as 'rotz',pi/3,'tranz',5 % "debug": if used; the indiviual sequences are plotted % === OUTPUT RESULTS ====== % T: resulting Frame % k: number of transformations made % % EXAMPLE: % Ttransrel(eye(4),'rotz',pi/10,'transz',5,'rotx',-pi/10,'transz',-5,'debug') % % See also: SGtransrelSG, CPLtransrelCPL, Tofchar, ezofchar % % % Copyright 2022 Tim C. Lueth |
PLcirctrapezoid(bh,al,wz)- creates a trapezoid contour with a predefied angle |
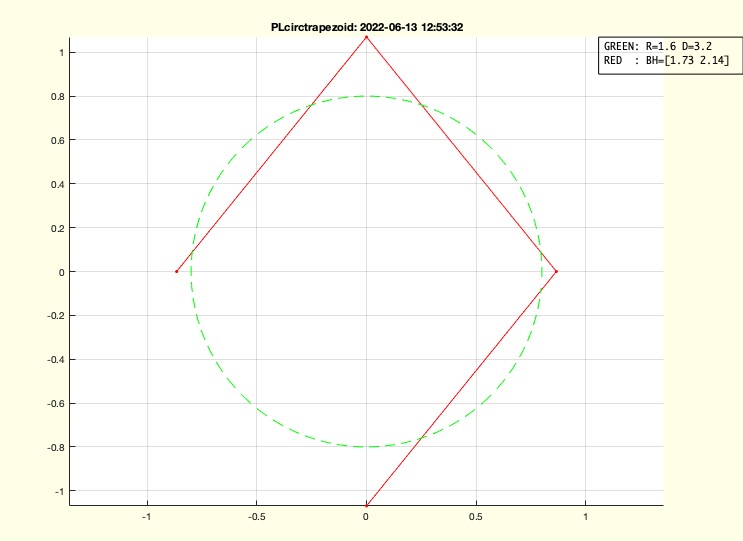 | % PLcirctrapezoid(bh,al,wz) - creates a trapezoid contour with a predefied angle % (by Tim Lueth, VLFL-Lib, 2022-JUN-11 as class: CLOSED POLYGON LISTS) % % for self tapping screws (Status of: 2022-06-13) % % Introduced first in SolidGeometry 5.2 % % See also: PLcircle, SGmotorshaftcoupling % % PL=PLcirctrapezoid([bh,al,wz]) % === INPUT PARAMETERS === % bh: [diameter/width and height]; default is [4 0] % al: rotation of CPL; default is 0 % wz: default is 51 degree; used to calculate the height % === OUTPUT RESULTS ====== % PL: PL to replace a circular solid using % % EXAMPLE: % PLcirctrapezoid(1.6/2) % PLcirctrapezoid(DIN13(3,'Core_Diameter_Bolt')/2) % % See also: PLcircle, SGmotorshaftcoupling % % % Copyright 2022 Tim C. Lueth |
SGmotorshaftcoupling(MM,LD,DH,MS,"thread")- creates a rigit motor shaft coupling |
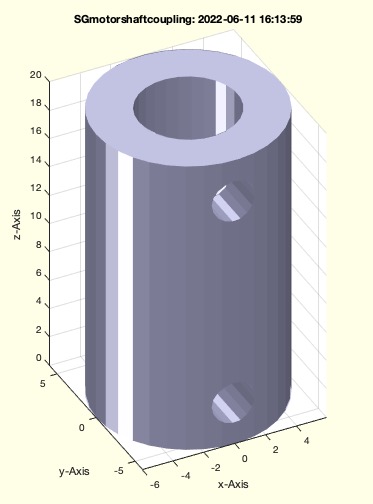 | % SGmotorshaftcoupling(MM,LD,DH,MS,"thread") - creates a rigit motor shaft coupling % (by Tim Lueth, VLFL-Lib, 2022-JUN-11 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGmotorshaft % % SGA=SGmotorshaftcoupling([MM,LD,DH,MS,"thread"]) % === INPUT PARAMETERS === % MM: [d1 d2]; default is [3 4] % LD: [L D]; default is 20 9 % DH: if true there are two grubscews per side % MS: metrix size of grub scew; defaul is M3 % "thread": if true, there is a thread designed; useless for M3 or FDM % === OUTPUT RESULTS ====== % SGA: SG of coupling % % EXAMPLE: % SGmotorshaftcoupling([3 6],[20 12]); % SGmotorshaftcoupling([3 4],[20 9]); % % See also: SGmotorshaft % % % Copyright 2022 Tim C. Lueth |
Tofchar(T,relparam)- creates an HT frame based on spatial relations |
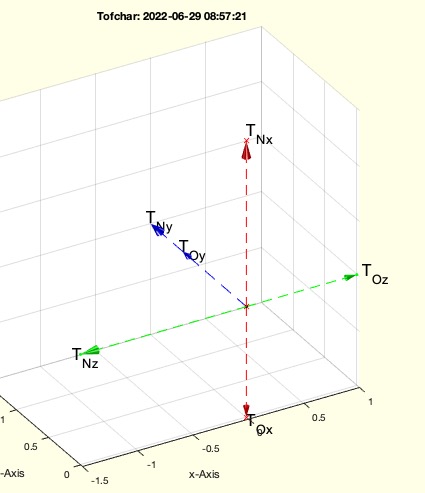 | % Tofchar(T,relparam) - creates an HT frame based on spatial relations % (by Tim Lueth, VLFL-Lib, 2022-JUN-10 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 5.2 % % See also: Ttransrel, ezofchar % % TN=Tofchar([T,relparam]) % === INPUT PARAMETERS === % T: char of ez, or empty for eye(4) % relparam: additional relative parameters for Ttransrel % === OUTPUT RESULTS ====== % TN: new T matrix % % EXAMPLE: % Tofchar('y') % ez = ey % Tofchar('x','roty',pi) % ez = x and rotated aorund ey % Tofchar('rotz',pi)) % % See also: Ttransrel, ezofchar % % % Copyright 2022 Tim C. Lueth |
SGwebcamcover- Simply a cover for a desktop webcam |
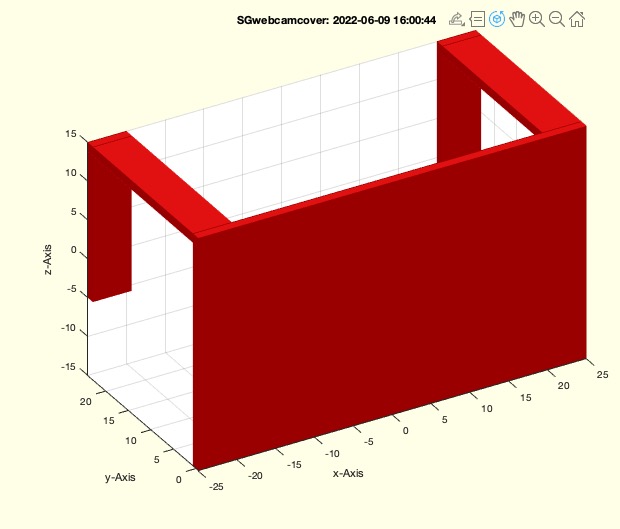 | % SGwebcamcover - Simply a cover for a desktop webcam % (by Tim Lueth, VLFL-Lib, 2022-JUN-09 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGcompass % % SG=SGwebcamcover % === OUTPUT RESULTS ====== % SG: Solid Geometry % % See also: SGcompass % % % Copyright 2022 Tim C. Lueth |
SGmirrorD(SG,T,D,centr)- Mirrors a solid in a distance to the maximal dimension in the specified direction |
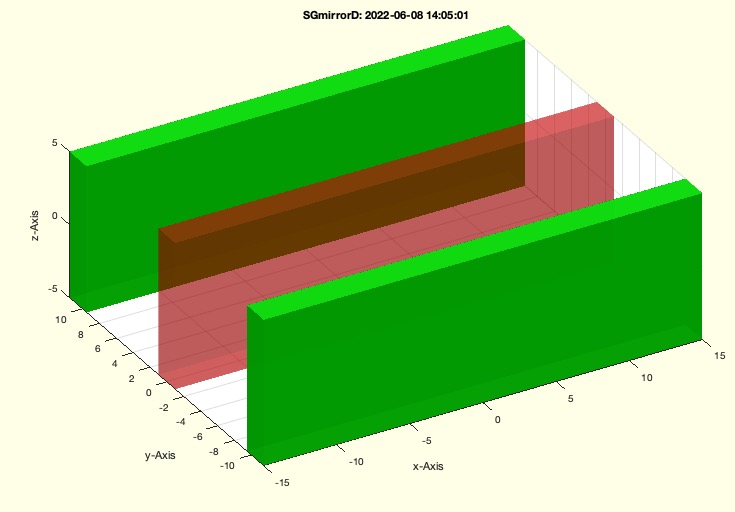 | % SGmirrorD(SG,T,D,centr) - Mirrors a solid in a distance to the maximal dimension in the specified direction % (by Tim Lueth, VLFL-Lib, 2022-JUN-08 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 5.2 % % See also: SGmirrorD, SGmirrorTxy % % [SGN,C]=SGmirrorD([SG,T,D,centr]) % === INPUT PARAMETERS === % SG: Solid Geometry % T: 'x','y','z' or T matrix % D: distance in direction % centr: true if result is centered; default is true % === OUTPUT RESULTS ====== % SGN: mirrored Solid % C: Both solids combined (and centered) % % EXAMPLE: % SGmirrorD(SGbox([30,2,10]),'x',19) % SGmirrorD(SGbox([30,2,10]),'y',19) % SGmirrorD(SGbox([30,2,10]),'z',19) % % See also: SGmirrorD, SGmirrorTxy % % % Copyright 2022 Tim C. Lueth |
dbplot(SG,"sub")- plots a SG class for debug purposes |
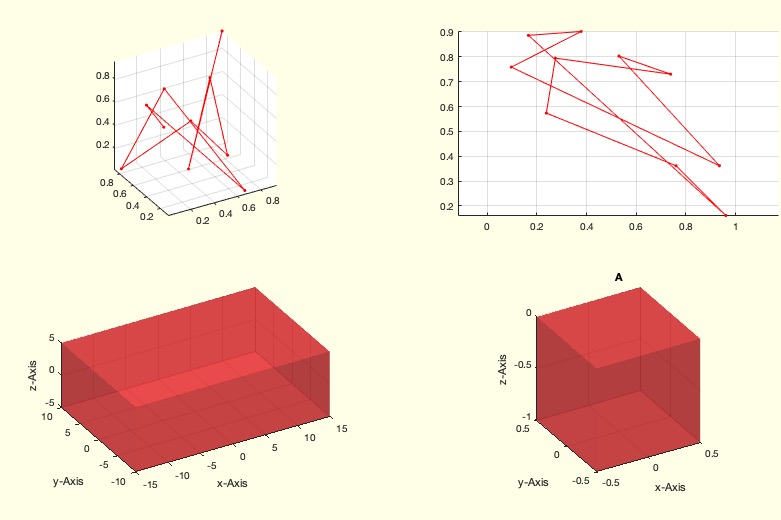 | % dbplot(SG,"sub") - plots a SG class for debug purposes % (by Tim Lueth, VLFL-Lib, 2022-JUN-07 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.2 % % See also: dbdisp, dbexit, dbpause, dbprintf, dbprintmode, dbreturn, % dbsave % % dbplot([SG,"sub"]) % === INPUT PARAMETERS === % SG: List of SG,CVL,CPL etc % "sub": use subplots instead of a single figure % % EXAMPLE: % A=SGseedcube; dbplot(rand(10,3),rand(10,2),SGbox,A,'sub') % % See also: dbdisp, dbexit, dbpause, dbprintf, dbprintmode, dbreturn, % dbsave % % % Copyright 2022 Tim C. Lueth |
SGboxradial(siz,rrr,ddd)- similar to SGbox but with radial edges in 2.5 D |
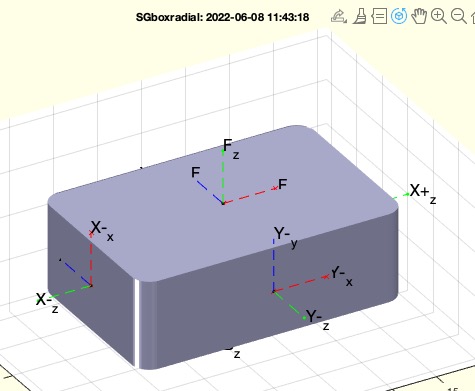 | % SGboxradial(siz,rrr,ddd) - similar to SGbox but with radial edges in 2.5 D % (by Tim Lueth, VLFL-Lib, 2022-JUN-07 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGbox, SGbar, SGseedcube % % SG=SGboxradial([siz,rrr,ddd]) % === INPUT PARAMETERS === % siz: [x y z] size % rrr: radius for radial edges;de fault is 2 % ddd: optional extrusion direction; default is 'z' % === OUTPUT RESULTS ====== % SG: % % See also: SGbox, SGbar, SGseedcube % % % Copyright 2022 Tim C. Lueth |
SGcolorerrors(SG)- idea simply to color solids instead of showing the errors |
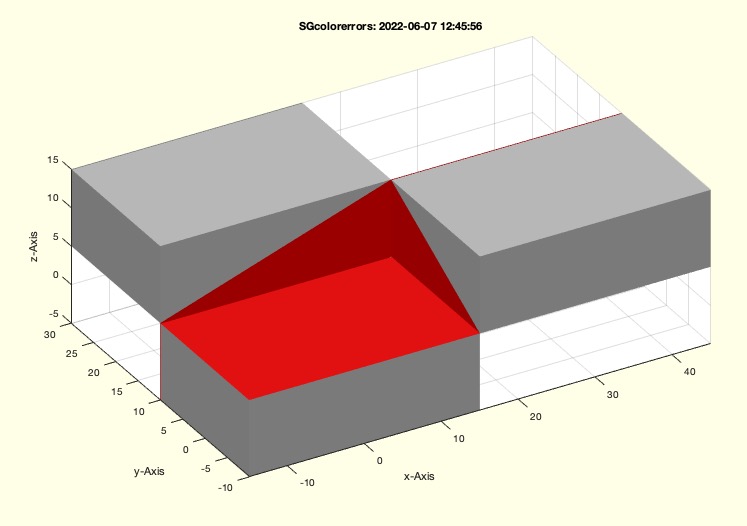 | % SGcolorerrors(SG) - idea simply to color solids instead of showing the errors % (by Tim Lueth, VLFL-Lib, 2022-JUN-07 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: SGmeshlab, SGcheckmeshlab, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices, SGcheckboundaryedges % % SG=SGcolorerrors(SG) % === INPUT PARAMETERS === % SG: Solid Geometry % === OUTPUT RESULTS ====== % SG: Colored Solid Geometry % % EXAMPLE: % SGcolorerrors(SGDIN13(6,80)) % still need to debug for long screws % SGcolorerrors(SGsample(35)) % SGcolorerrors(SGsample(41)) % Need to separate the solids by doubling the non manifold egdes and moving them % SGcolorerrors(SGsample(40)) % Need to separate the solids by doubling the non manifold egdes and moving them % % % See also: SGmeshlab, SGcheckmeshlab, SGchecknonmanifoldedges, % SGchecknonmanifoldvertices, SGcheckboundaryedges % % % Copyright 2022 Tim C. Lueth |
SGtube(RR,LL,sl)- Simplified version of SGplugintube |
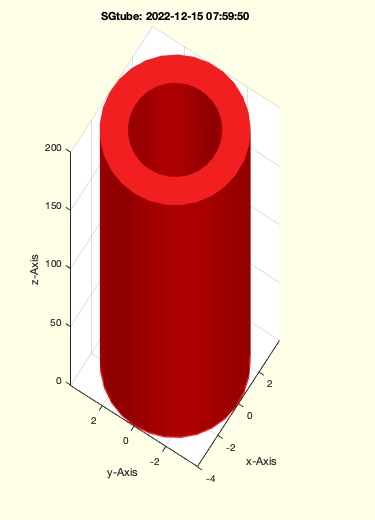 | % SGtube(RR,LL,sl) - Simplified version of SGplugintube % (by Tim Lueth, VLFL-Lib, 2022-JUN-07 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: SGplugintube % % SG=SGtube([RR,LL,sl]) % === INPUT PARAMETERS === % RR: [Inner Radius x Wall size]; default is 8 1.5 % LL: Length of tube; default is 100 % sl: slot size % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGtube([2.5 .5],200) % % See also: SGplugintube % % % Copyright 2022 Tim C. Lueth |
SGdesignConeconnector(RHA)- designs a peg in hole connection using a truncated cone that can be printed with FDM |
 | % SGdesignConeconnector(RHA) - designs a peg in hole connection using a truncated cone that can be printed with FDM % (by Tim Lueth, VLFL-Lib, 2022-JUN-06 as class: AUTOMATIC DESIGN) % % Design even for small and long cylindric objects such as spindles % (Status of: 2022-06-07) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignPeginHole, SGsteepspindle % % [Hsub,Nsub,S,Hadd,Nadd]=SGdesignConeconnector([RHA]) % === INPUT PARAMETERS === % RHA: Radius Height Angle; default is [2.0 10 55] % === OUTPUT RESULTS ====== % Hsub: Subtraction Solid for Ground Level % Nsub: not used yet % S: not used yet % Hadd: not used yet % Nadd: Supplement Solid for Top Level % % EXAMPLE: % SGDIN13(6,20,2); SG=SGTsetBFsimple(ans); % [Hsub,~,~,~,Nadd]=SGdesignConeconnector([2.0 10]); % SG=SGsubtract(SG,Hsub,'alignT',{'C','B'}); SG=SGunion(SG,Nadd,'alignT',{'C','F'}); % SGfigure(-30,30); SGTplotalpha(SG); % % SGDIN13(6,100,2); SG=SGTsetBFsimple(ans); % [Hsub,~,~,~,Nadd]=SGdesignConeconnector([2.0 25]); % SG=SGsubtract(SG,Hsub,'alignT',{'C','B'}); SG=SGunion(SG,Nadd,'alignT',{'C','F'}); SGfigure(-30,30); SGTplotalpha(SG); % % See also: SGdesignPeginHole, SGsteepspindle % % % Copyright 2022 Tim C. Lueth |
SGpartslistfindproductcodes(AParts)- creates a text line or cell list of hyperlinks to order parts of a parts list |
 | % SGpartslistfindproductcodes(AParts) - creates a text line or cell list of hyperlinks to order parts of a parts list % (by Tim Lueth, VLFL-Lib, 2022-JUN-05 as class: AUTOMATIC DESIGN) % % this fnctn requires the use of product codes in the parts list using % the syntax % 'PC[' ']' |
SGdesignIgusdragchain(M)- creates the subtraction and supplemet solids for fixing a igus drag chain |
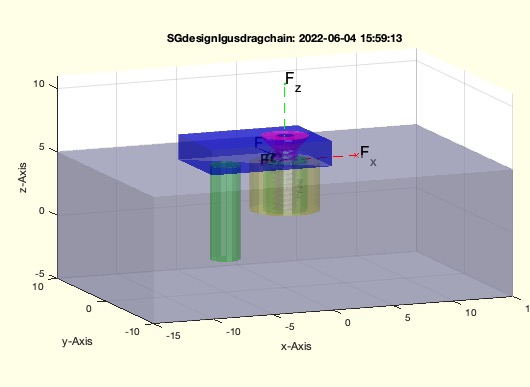 | % SGdesignIgusdragchain(M) - creates the subtraction and supplemet solids for fixing a igus drag chain % (by Tim Lueth, VLFL-Lib, 2022-JUN-04 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignDIN7991BushingE % % [Nsub,Nadd,S,AParts]=SGdesignIgusdragchain([M]) % === INPUT PARAMETERS === % M: [2 5 2 7],true); % M2 DIN 7991, Distance 5, Pin 2 length 7) % === OUTPUT RESULTS ====== % Nsub: Subtraction solid (green) % Nadd: Supplement solid (yellow) % S: Screw (magenta) % AParts: Parts list % % See also: SGdesignDIN7991BushingE % % % Copyright 2022 Tim C. Lueth |
SGdesignDIN7991BushingE(mlb,ins,tpl)- creates subtraction solids for a screw fixation at a specific frame position of a solid |
 | % SGdesignDIN7991BushingE(mlb,ins,tpl) - creates subtraction solids for a screw fixation at a specific frame position of a solid % (by Tim Lueth, VLFL-Lib, 2022-JUN-04 as class: AUTOMATIC DESIGN) % % This fnctn is designed for KERBKONUS bushings % THIS FNCTN USES FITTINGS by fnctn slfit und DIN4AMfitting % If two elements should be connected using a DIN7991 Screw and a % Kerbkonus bushing, this fnctn helps to create the subtraction solids to % achive a fnctnal connection using standard machine elements. % No pocket holes are support yet % Support spacer such as radial bearings, axial bearings % (Status of: 2022-06-04) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignDIN7991, SGdesignDIN912BushingE, % SGdesignDIN912DIN985, SGdesignDIN912DIN985axialbearing, % SGdesignDIN912DIN985axradbearing, SGdesignDIN912DIN985radialbearing % % [Hsub,Nsub,SS,Hadd,Nadd,Parts]=SGdesignDIN7991BushingE([mlb,ins,tpl]) % === INPUT PARAMETERS === % mlb: [M-Screw Length overlength and spacer]; default [2.5 6 0 0] % ins: Characters for "T"unnel or "P"ocket; default is 'TT' for [HEAD NUT] % tpl: Length of Insertion T/P for [HEAD NUT]; default is 10 10 % === OUTPUT RESULTS ====== % Hsub: Subtraction Solid for Head side including frame 'C' % Nsub: Subtraction Solid for Bushing side including frame 'C' % SS: Srew and Nut for Visualziation including frame 'C' % Hadd: remaining wall thickness % Nadd: parts list for assembly of one connection % Parts: % % EXAMPLE: % SGdesignDIN7991BushingE([2.5 3 0 5],'TT',5); % [Hsub,Nsub,S,Hadd,Nadd]=SGdesignDIN7991BushingE([2.5 3 0 5],'TT',5); % % See also: SGdesignDIN7991, SGdesignDIN912BushingE, % SGdesignDIN912DIN985, SGdesignDIN912DIN985axialbearing, % SGdesignDIN912DIN985axradbearing, SGdesignDIN912DIN985radialbearing % % % Copyright 2022 Tim C. Lueth |
SGdragstrip(siz,ch,alp)- creates a dragchain cables as texture strip |
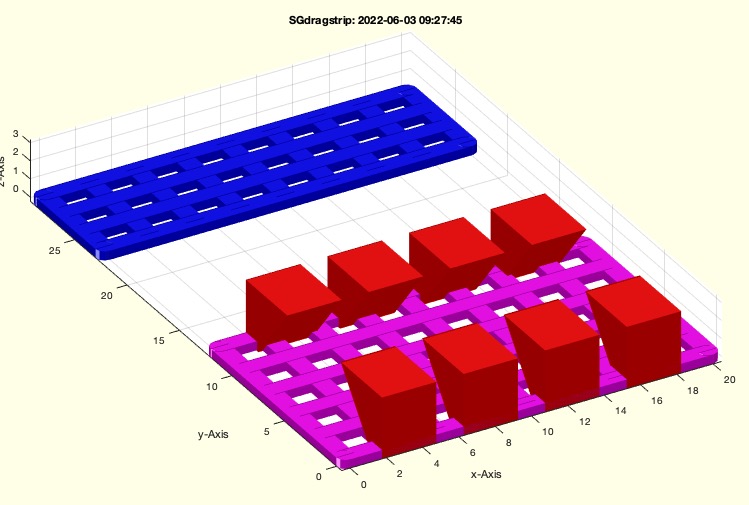 | % SGdragstrip(siz,ch,alp) - creates a dragchain cables as texture strip % (by Tim Lueth, VLFL-Lib, 2022-JUN-03 as class: PARAMETRIC DESIGN) % % extracted from exp_2022_06_02_dragchain (Status of: 2022-06-03) % % Introduced first in SolidGeometry 5.2 % % See also: SGdragchain, SGdragchainelement % % [SGA,SGB]=SGdragstrip([siz,ch,alp]) % === INPUT PARAMETERS === % siz: [Length Width wall pinheight pinwidth pindistance % ch: cable heigt; default is 1.4mm % alp: hook angle; default is 51 degree % === OUTPUT RESULTS ====== % SGA: Lower Strip % SGB: Upper Strip % % EXAMPLE: % SGdragstrip([90 12],1.4) % % See also: SGdragchain, SGdragchainelement % % % Copyright 2022 Tim C. Lueth |
amazon(searchterms)- just opens the website of this company |
 | % amazon(searchterms) - just opens the website of this company % (by Tim Lueth, VLFL-Lib, 2022-JUN-03 as class: AUXILIARY PROCEDURES) % % In order to avoid the distraction of unwanted marketing and advertising % by both operating system vendors and browser manufacturers as well as % the companies themselves, I have written a series of fnctns that call % relevant WWW pages directly from Matlab % These fnctns will not be part of the SG-Lib, as they provide % information about my personal way of working and my current research % activities. The SG-Lib should help other people to pursue their own % ideas and not my ideas. (Status of: 2022-06-03) % % Introduced first in SolidGeometry 5.2 % % See also: firmen, SGexplain, Notiz, amazon_org, amazonbestellung, % amazoncode2link, amazonlink2code % % amazon([searchterms]) % === INPUT PARAMETERS === % searchterms: string for search % % EXAMPLE: % amazon % amazon Motor N20 % % See also: firmen, SGexplain, Notiz, amazon_org, amazonbestellung, % amazoncode2link, amazonlink2code % % % Copyright 2022 Tim C. Lueth |
TofLR(L,R,T0)- returns a 2D link matrix or a 3D link matrix |
 | % TofLR(L,R,T0) - returns a 2D link matrix or a 3D link matrix % (by Tim Lueth, VLFL-Lib, 2022-JUN-01 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 5.2 % % See also: TofDPhi, TofDPhiH, TofP, TofPEul, TofPez, TofPose, TofR, % TofSG, TofSG2021, TofSGML, TofSGez, TofSGnew, TofT, TofTrel, TofVL, % TofVLFL, TofVLFLULfi, TofVLUL, TofVLULez, TofVLprojection, Tofcam, % TofcamVLPL, TofcrossedSG, Tofgca, Tofn, Tofplaneparam, Tofselect3d, % ToftransrelSG, Tofview % % T=TofLR([L,R,T0]) % === INPUT PARAMETERS === % L: length of a link or [L wz] or [L wx wy wz] % R: angle of a joint at the beginning of the link or just [wz] or [wx wy % wz] % T0: Frame the is is linked to default is eye(4); or List of L or cell % list of T % === OUTPUT RESULTS ====== % T: Homogenoues transformation matrix % % EXAMPLE: % TofLR(10,[pi/4 pi/4 0],TofLR(10,pi/4)); % TofLR([10 pi/4],'',[5 0 0 pi/3; 5 0 pi/6 0; 5 0 0 -pi/4 ]) % TofLR([10 pi/4],'',{TofPez([10 10 10],[0 1 1])}) % % See also: TofDPhi, TofDPhiH, TofP, TofPEul, TofPez, TofPose, TofR, % TofSG, TofSG2021, TofSGML, TofSGez, TofSGnew, TofT, TofTrel, TofVL, % TofVLFL, TofVLFLULfi, TofVLUL, TofVLULez, TofVLprojection, Tofcam, % TofcamVLPL, TofcrossedSG, Tofgca, Tofn, Tofplaneparam, Tofselect3d, % ToftransrelSG, Tofview % % % Copyright 2022 Tim C. Lueth |
BBconcat(BBA,BBB)- concatenate two bounding boxes |
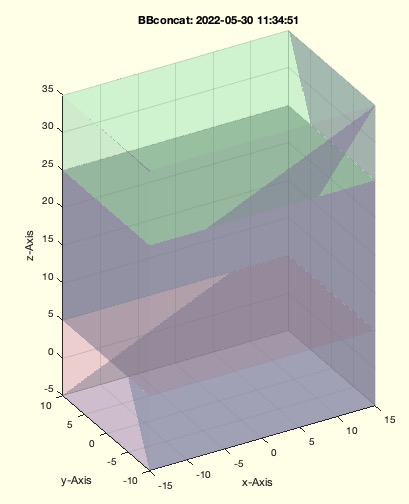 | % BBconcat(BBA,BBB) - concatenate two bounding boxes % (by Tim Lueth, VLFL-Lib, 2022-MAI-25 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.2 % % See also: BBofBB, BBofCPL, BBofCPS, BBofPS, BBofPose, BBofSG, % BBofSGcutT, BBofT, BBofVL, VLDLBBofVLFL % % BBC=BBconcat(BBA,BBB) % === INPUT PARAMETERS === % BBA: Bounding box B or solid A % BBB: Bounding box B or solid A % === OUTPUT RESULTS ====== % BBC: New boundin box [xmin xmax ymin ymax zmin zmax] % % EXAMPLE: % BBconcat(SGbox,SGtransP(SGbox,[0 0 30])) % % See also: BBofBB, BBofCPL, BBofCPS, BBofPS, BBofPose, BBofSG, % BBofSGcutT, BBofT, BBofVL, VLDLBBofVLFL % % % Copyright 2022 Tim C. Lueth |
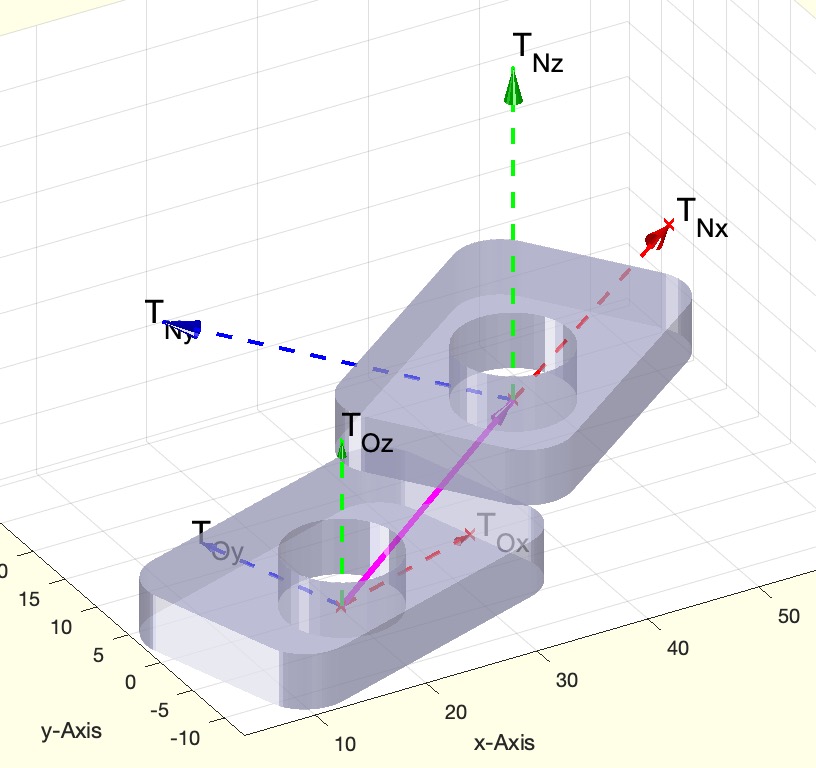
SGTmatchT(SG,T,TM,az)- matches two frame to have same ey-vectors ez and ex vectors |
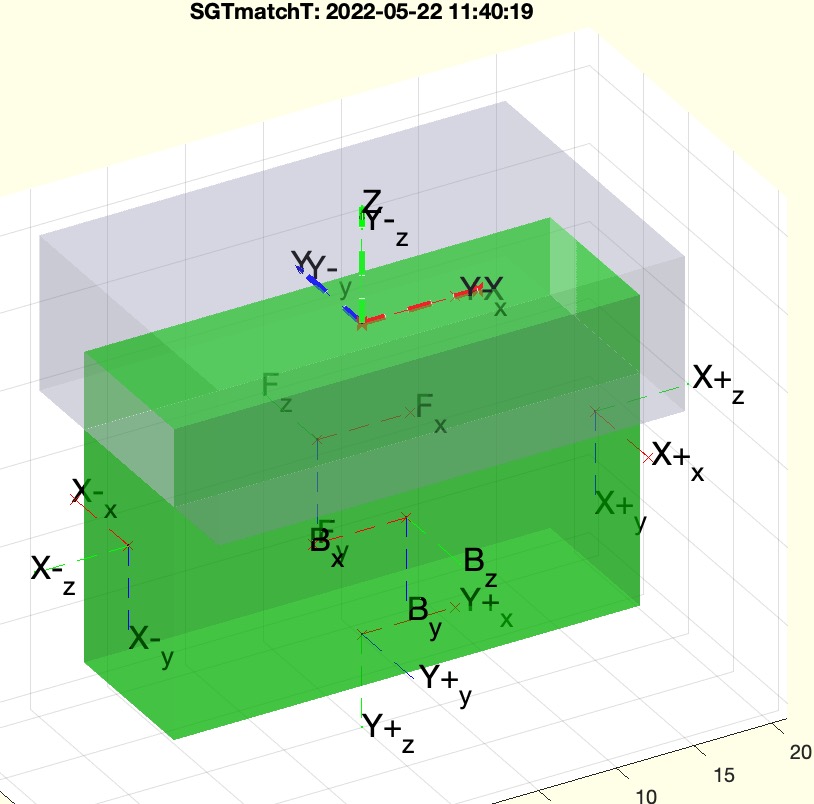 | % SGTmatchT(SG,T,TM,az) - matches two frame to have same ey-vectors ez and ex vectors % (by Tim Lueth, VLFL-Lib, 2022-MAI-22 as class: KINEMATICS AND FRAMES) % % Fnctn has been implemented as part of SGtransrelSG in 2016 (Status of: % 2022-05-22) % % Introduced first in SolidGeometry 5.2 % % See also: SGtransT, SGTalignT, SGtransrelSG % % SGN=SGTmatchT(SG,[T,TM,az]) % === INPUT PARAMETERS === % SG: Original Position % T: Frame Name of SG or Frame % TM: eye(4) or new coordinate System % az: final turn around ez % === OUTPUT RESULTS ====== % SGN: Final Position of SG % % EXAMPLE: % SGbox; SG=ans; SGTmatchT(SG,'Y-') % SGTmatchT(SG,'Y-',TofPez([0 0 40],[0 -1 0])) % % See also: SGtransT, SGTalignT, SGtransrelSG % % % Copyright 2022 Tim C. Lueth |
SGTalignT(SG,T,TM,az)- aligns two frame to have same ey-vectors by opposite ez vectors |
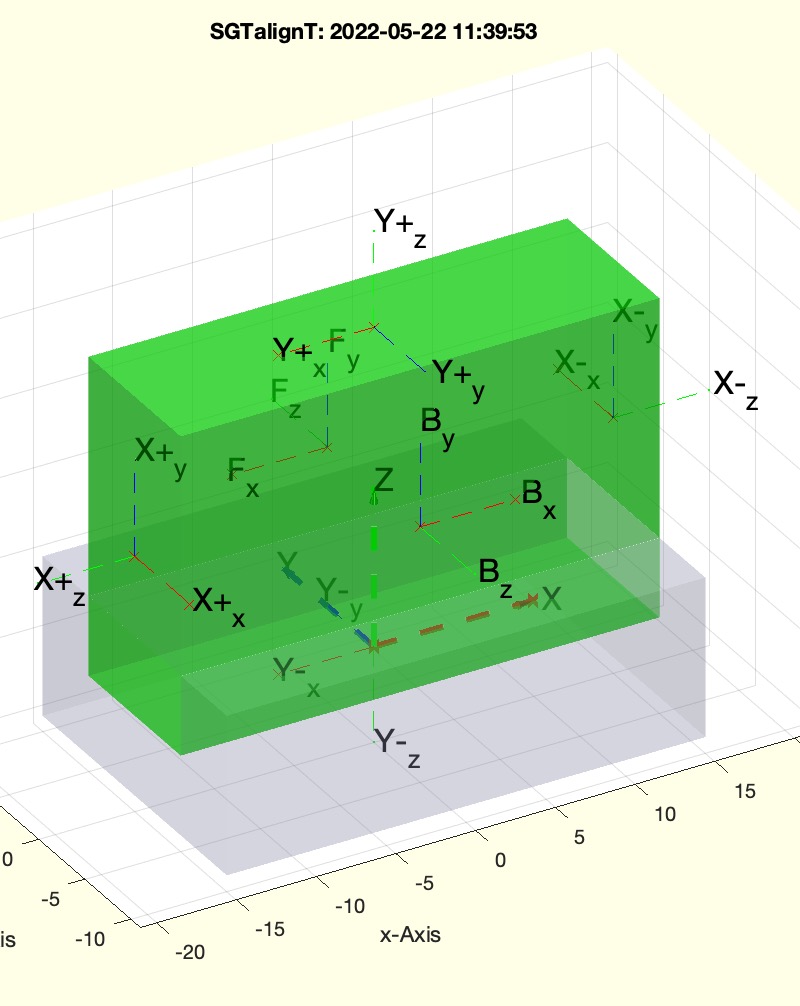 | % SGTalignT(SG,T,TM,az) - aligns two frame to have same ey-vectors by opposite ez vectors % (by Tim Lueth, VLFL-Lib, 2022-MAI-22 as class: KINEMATICS AND FRAMES) % % Fnctn has been implemented as part of SGtransrelSG in 2016 (Status of: % 2022-05-22) % % Introduced first in SolidGeometry 5.2 % % See also: SGtransT, SGTmatchT, SGtransrelSG % % SGN=SGTalignT(SG,[T,TM,az]) % === INPUT PARAMETERS === % SG: Solid Geometry % T: Frame or Frame name of SG % TM: eye(4) or new coordiante system to match % az: optional final turn around ez % === OUTPUT RESULTS ====== % SGN: New Position of SG using SGtransT % % EXAMPLE: % SGbox; SG=ans; SGTalignT(SG,'Y-') % SGTalignT(SG,'Y-',TofPez([0 0 40],[0 -1 0])) % % See also: SGtransT, SGTmatchT, SGtransrelSG % % % Copyright 2022 Tim C. Lueth |
CPLplothatched(CPL,c,al)- plots a CPL including hatch |
 | % CPLplothatched(CPL,c,al) - plots a CPL including hatch % (by Tim Lueth, VLFL-Lib, 2022-MAI-20 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: CPLhatch % % h=CPLplothatched(CPL,[c,al]) % === INPUT PARAMETERS === % CPL: CPL % c: color % al: [alpha width, distance] % === OUTPUT RESULTS ====== % h: handle to go % % EXAMPLE: % SGfigure; CPLplothatched(CPLsample(21),'b',[80 .4]); shg % % See also: CPLhatch % % % Copyright 2022 Tim C. Lueth |
CPLhatch(CPL,d,al,co)- creates a hatch for a CPL |
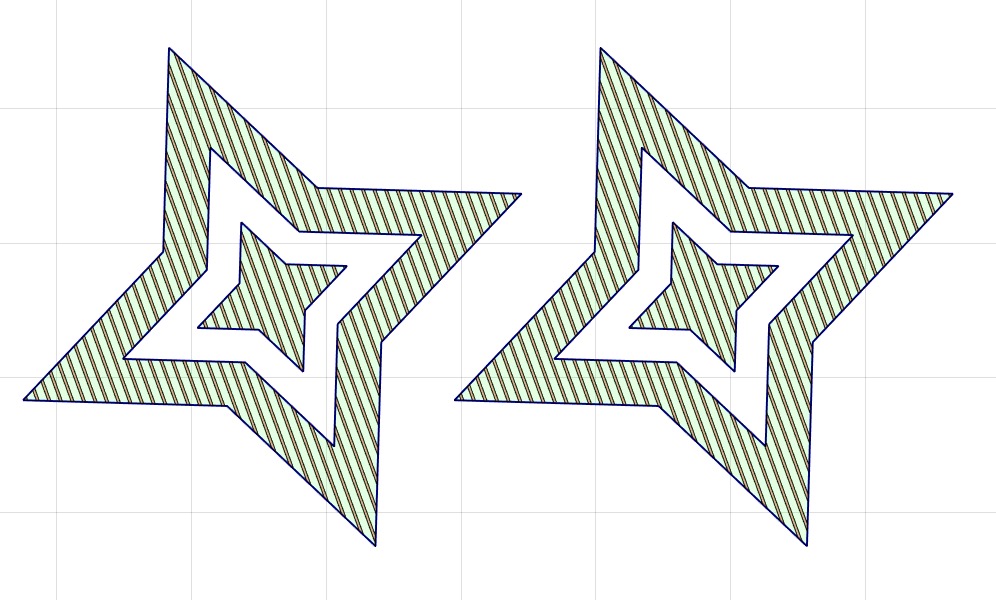 | % CPLhatch(CPL,d,al,co) - creates a hatch for a CPL % (by Tim Lueth, VLFL-Lib, 2022-MAI-20 as class: CLOSED POLYGON LISTS) % % Completely Modified 2.1.2023 to support all angles and have angle % independent slot distance (Status of: 2023-01-02) % % Introduced first in SolidGeometry 5.2 % % See also: CPLplothatched, CPLradialhatch % % [CPLI,CPLS,mm,d]=CPLhatch(CPL,[d,al,co]) % === INPUT PARAMETERS === % CPL: CPL % d: thickness and distance as multiple % al: angle in degree; default is 60 degree % co: contours to select % === OUTPUT RESULTS ====== % CPLI: CPL of hatch by intersection => Thin lines=> Thin hatch % CPLS: CPL of hatch by subtraction => Thin lines=> Thick hatch % mm: center point % d: thickness and distance as multiple % % EXAMPLE: % CPLhatch(CPLsample(14)+[123 23],[.1 1],80); % CPLhatch(CPLsample(20)+[123 23],'',10); % CPLhatch(CPLsample(14)+[123 23],.4,45); % CPLhatch(CPLsample(14)+[123 23],.4,10,[0 1; 1 2]); % CPLhatch(CPLsample(14)+[123 23],.4,45,[2 3]); % % See also: CPLplothatched, CPLradialhatch % % % Copyright 2022-2023 Tim C. Lueth |
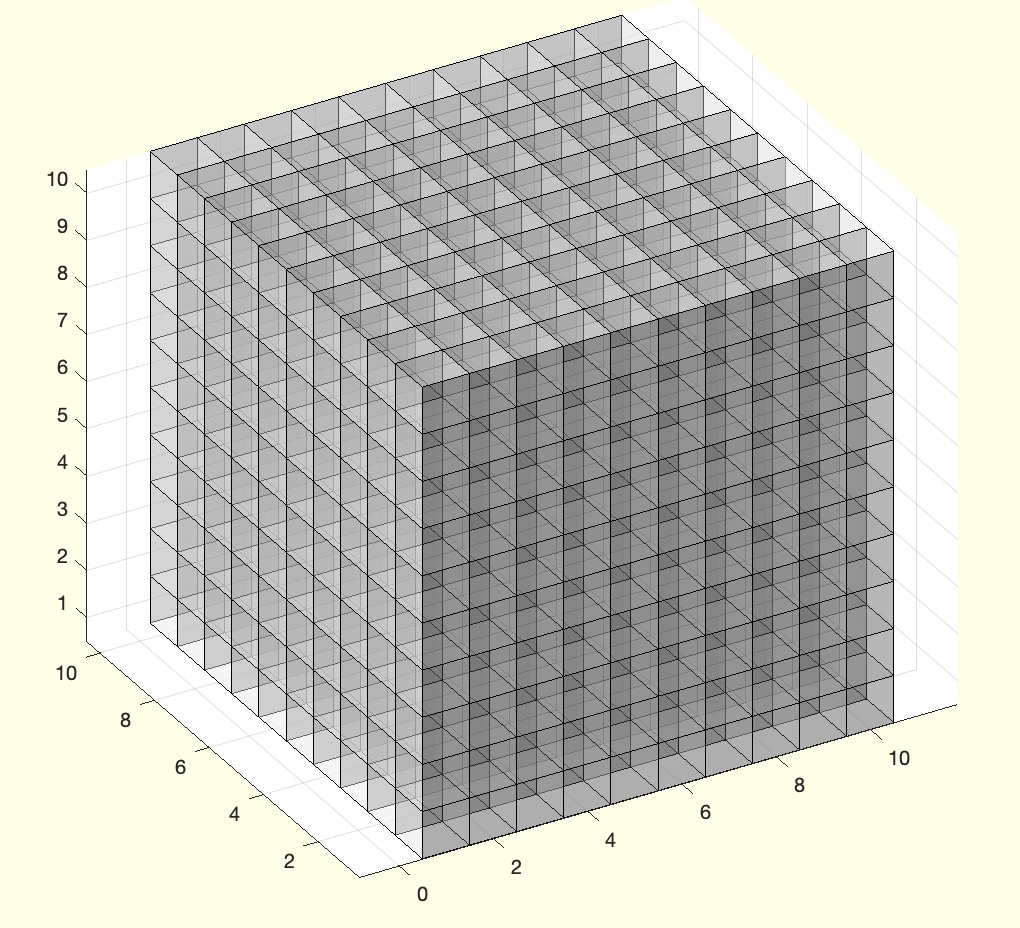
VMplotvoxels(VM,vs,c,ea)- plots a voxel model as transperent cubes |
 | % VMplotvoxels(VM,vs,c,ea) - plots a voxel model as transperent cubes % (by Tim Lueth, VLFL-Lib, 2022-MAI-19 as class: VOXELS) % % there is no handle to the graphics object because of speed reasons % very slow fnctn since Matlab doe simulates a volume renderer by a % surface rendering (Status of: 2022-05-20) % % Introduced first in SolidGeometry 5.2 % % See also: VLplotvoxel % % VMplotvoxels(VM,[vs,c,ea]) % === INPUT PARAMETERS === % VM: Voxel Model % vs: size of voxels; default is [1 1 1] % c: color default is 'k' % ea: edge alpha value; default is 0.5 % % EXAMPLE: % I=zeros(10,10,10); I(4:6,4:6,3:8)=1; % VMplotvoxels(I,[1 1 1],'r',1) % % % [VM,vs]=VMreaddicomdir('/Volumes/LUETH-WIN/WIN AIM Matlab Libraries/SolidGeometry-Code/AIM_DICOMFILES/'); % [VN,ns]=VMresize(VM,[0.1 0.1 0.1],vs); % % % See also: VLplotvoxel % % % Copyright 2022 Tim C. Lueth |
VLplotvoxel(VL,vs,c,a)- plots a voxel at the position VL |
 | % VLplotvoxel(VL,vs,c,a) - plots a voxel at the position VL % (by Tim Lueth, VLFL-Lib, 2022-MAI-19 as class: VOXELS) % % Introduced first in SolidGeometry 5.2 % % See also: VLplot, VLscatter % % VLplotvoxel(VL,[vs,c,a]) % === INPUT PARAMETERS === % VL: point or list of points % vs: size of voxel; default is [1 1 1] % c: globol color or list of colors of same size as VL % a: globol transparency or list of transparency of same size as VL % % EXAMPLE: % xx=1:1:10; yy=1:1:10; zz=1:1:10; % VL=VLmeshgrid(xx,yy,zz); % SGfigure(-30,30); VLplotvoxel(VL,[1 1 1],'w',0.4); % % See also: VLplot, VLscatter % % % Copyright 2022 Tim C. Lueth |
HTplot(T,Torg)- plots a HT matrix |
 | % HTplot(T,Torg) - plots a HT matrix % (by Tim Lueth, VLFL-Lib, 2022-MAI-18 as class: KINEMATICS AND FRAMES) % % in the plane San Diego to Boston (Status of: 2022-05-18) % % Introduced first in SolidGeometry 5.2 % % See also: tplot % % h=HTplot(T,[Torg]) % === INPUT PARAMETERS === % T: HT matrix % Torg: Origin of T % === OUTPUT RESULTS ====== % h: handle to go % % EXAMPLE: % A=SGsample(27); SGfigure(-30,30); T=TofP([20 0 10],rot(0,0,pi/10)); A=SGtransT(A,T); % SGplotalpha(A,'w',0.5); B=SGtransT(A,T); SGplotalpha(B,'w',0.5); HTplot(T,T); % % See also: tplot % % % Copyright 2022 Tim C. Lueth |
SGbar(S,n,pack,nofram)- returns a box without frames |
 | % SGbar(S,n,pack,nofram) - returns a box without frames % (by Tim Lueth, VLFL-Lib, 2022-MAI-18 as class: PARAMETRIC DESIGN) % % SGbox, SGbar and SGseedcube are very similar % SGbox has 6 frames % SGbar has no frames % SGseedcube has one "F" frame and is below the xy plane (Status of: % (Status of: 2022-05-18) % % Introduced first in SolidGeometry 5.2 % % See also: SGbox, SGseedcube % % SG=SGbar([S,n,pack,nofram]) % === INPUT PARAMETERS === % S: % n: % pack: % nofram: % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGbar([30 20 10]) % % See also: SGbox, SGseedcube % % % Copyright 2022 Tim C. Lueth |
plotrulerline(P1,P2,nam)- draws an simple ruler between two points in 2D |
 | % plotrulerline(P1,P2,nam) - draws an simple ruler between two points in 2D % (by Tim Lueth, VLFL-Lib, 2022-MAI-14 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: tplotruler % % plotrulerline(P1,P2,[nam]) % === INPUT PARAMETERS === % P1: Start Point or [P1;P2] % P2: End Point % nam: Name, for instace "D=" % % See also: tplotruler % % % Copyright 2022 Tim C. Lueth |
SGdragchainelement(L,R,al,h)- returns a single element of a drag chain |
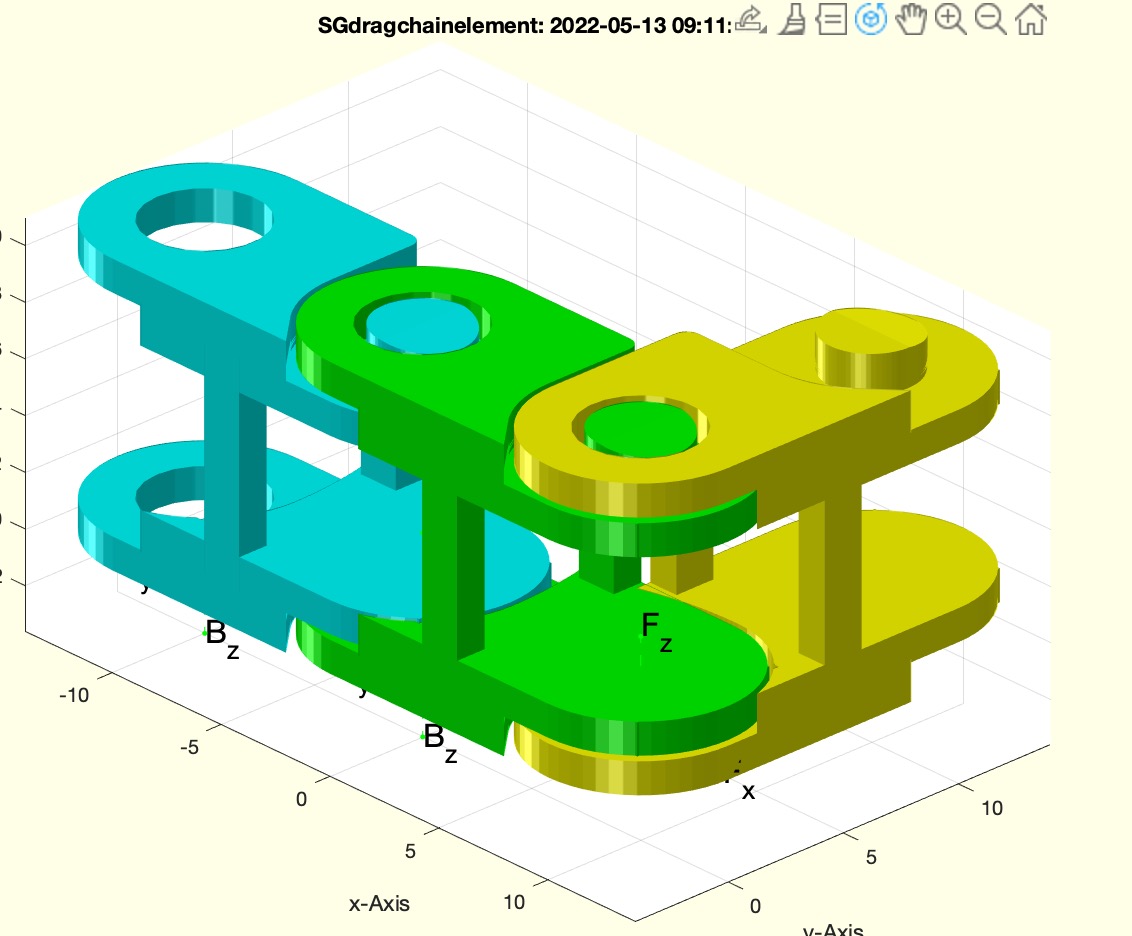 | % SGdragchainelement(L,R,al,h) - returns a single element of a drag chain % (by Tim Lueth, VLFL-Lib, 2022-MAI-13 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGmeanderchain, SGdragstrip, SGdragchain % % SGdragchainelement([L,R,al,h]) % === INPUT PARAMETERS === % L: Distance of axis; default is 10 % R: [Height Width and axis diameter]; default is [8 11 4] % al: rotating angle; default is pi/2 [0 pi/2] % h: material thickness; default is 1.2 mm % % See also: SGmeanderchain, SGdragstrip, SGdragchain % % % Copyright 2022 Tim C. Lueth |
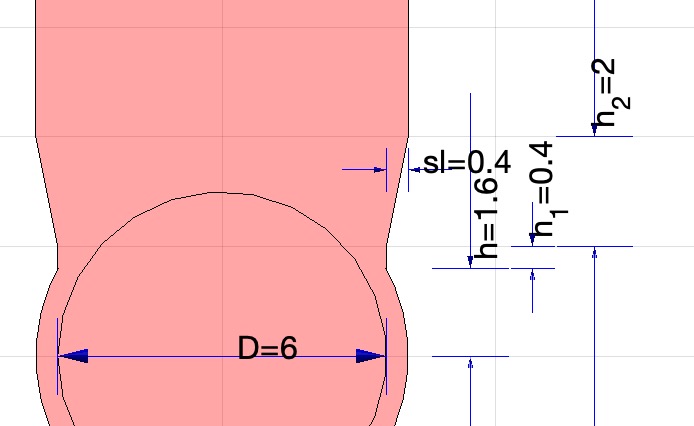
PLslottapering(D,H,sl,rm,al)- CPL of a slot tapering for creating blades for axis etc |
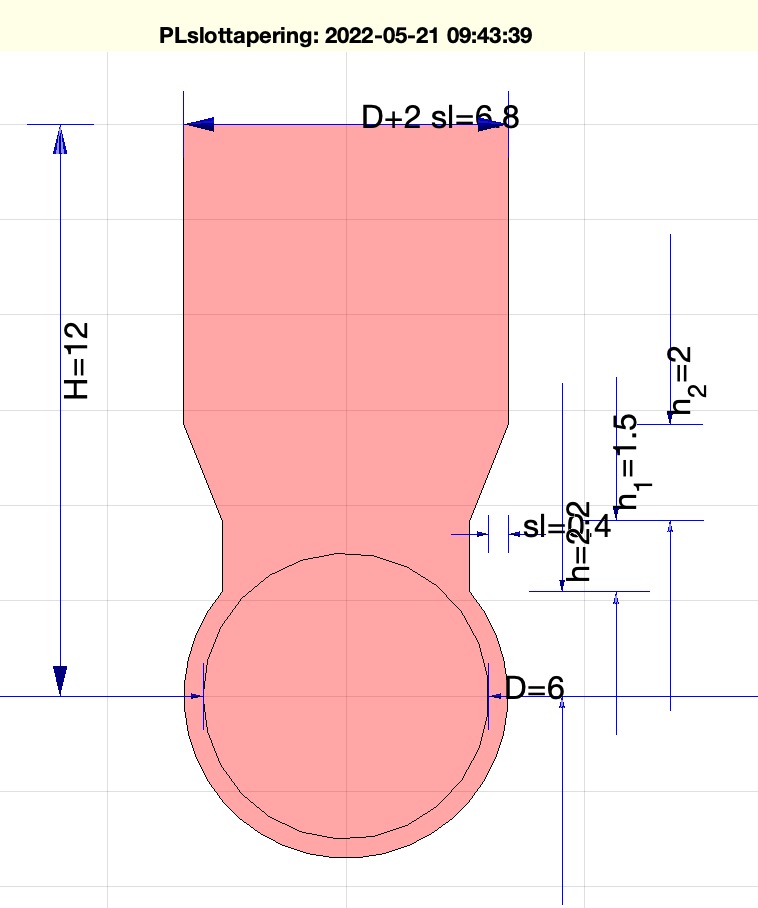 | % PLslottapering(D,H,sl,rm,al) - CPL of a slot tapering for creating blades for axis etc % (by Tim Lueth, VLFL-Lib, 2022-MAI-13 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: PLshaft, PLshaftrad, CPLmotorshaft % % CPLX=PLslottapering([D,H,sl,rm,al]) % === INPUT PARAMETERS === % D: Diameter of the axis % H: Height of the Channel / Blade % sl: slot size; default is slfit'c' % rm: [tapering height-block height-ramp];m default is [2*sl 1.5 2] % al: optional rotation angle % === OUTPUT RESULTS ====== % CPLX: Contour to cout out % % EXAMPLE: % PLslottapering(6,10,0.4,[.2 1 1]); % PLslottapering(6,10,0.4,[.2 1 1],-pi/3); % % See also: PLshaft, PLshaftrad, CPLmotorshaft % % % Copyright 2022 Tim C. Lueth |
SGdragchain(L,R)- creates a 3D printable already assembled drag chain |
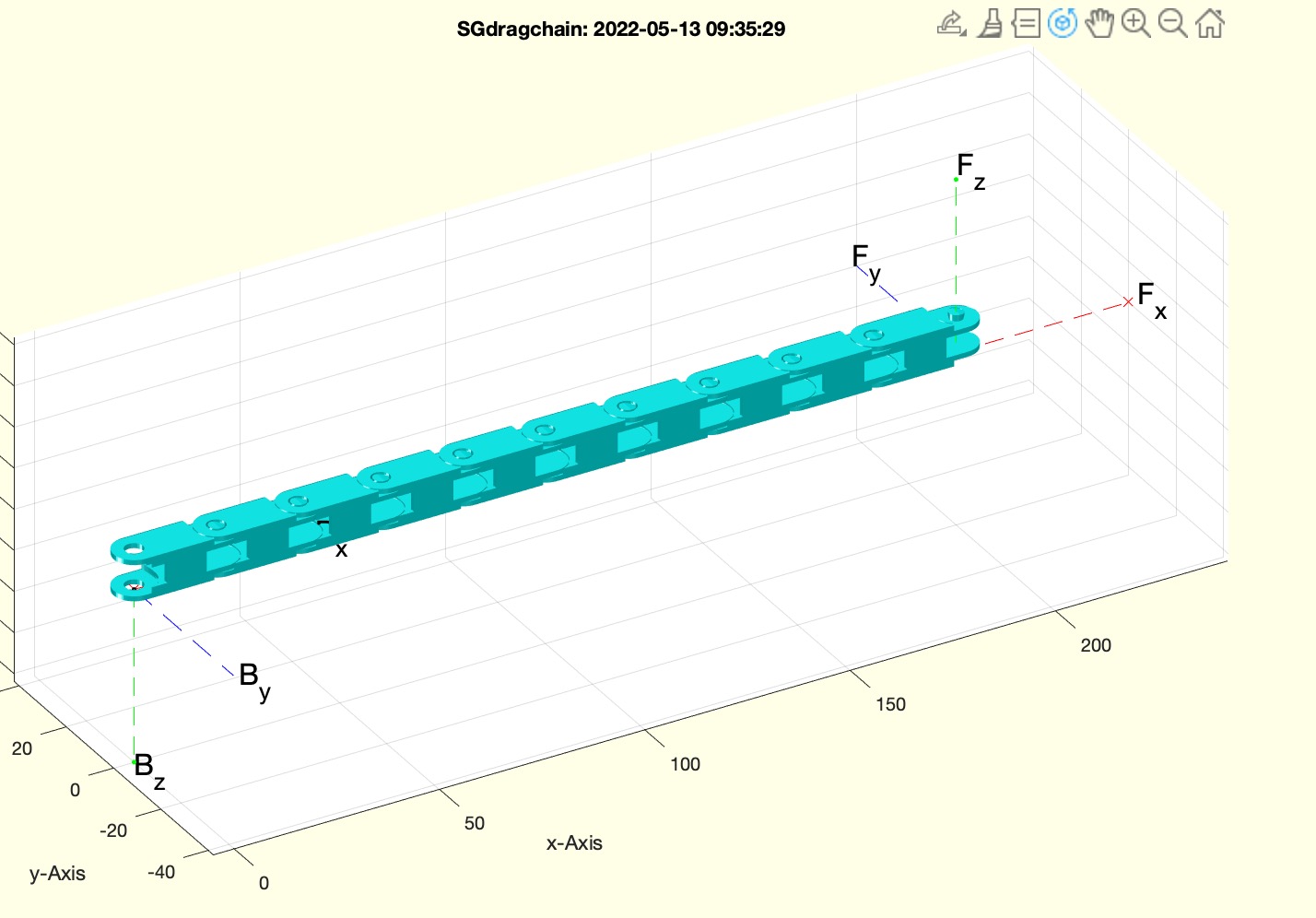 | % SGdragchain(L,R) - creates a 3D printable already assembled drag chain % (by Tim Lueth, VLFL-Lib, 2022-MAI-13 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGdragstrip, SGdragchainelement % % SG=SGdragchain([L,R]) % === INPUT PARAMETERS === % L: % R: % === OUTPUT RESULTS ====== % SG: % % See also: SGdragstrip, SGdragchainelement % % % Copyright 2022 Tim C. Lueth |
SGmeshground(s,"fix")- creates a ground mesh that is a flexible texture on a FDM printer |
 | % SGmeshground(s,"fix") - creates a ground mesh that is a flexible texture on a FDM printer % (by Tim Lueth, VLFL-Lib, 2022-MAI-13 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: VLFLweave, SGdragchain, SGdragchainelement, SGdragstrip, % SGmeanderchain % % [SGF,xx,yy]=SGmeshground([s,"fix"]) % === INPUT PARAMETERS === % s: [x-wdith y-width grid opening wires height]; default is [100 12 2 % .45 0] % "fix": if used; the grid is adjusted to create a best fit % === OUTPUT RESULTS ====== % SGF: Solid % xx: xx values % yy: yy values % % EXAMPLE: % SGmeshground([40 40 2]) % % See also: VLFLweave, SGdragchain, SGdragchainelement, SGdragstrip, % SGmeanderchain % % % Copyright 2022 Tim C. Lueth |
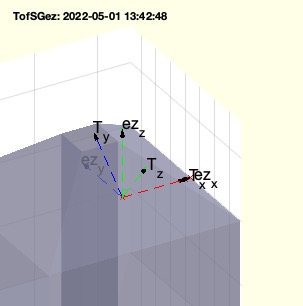
tplotruler(T,z,s,st)- plots a 3D ruler als arrow sequence in a figure |
 | % tplotruler(T,z,s,st) - plots a 3D ruler als arrow sequence in a figure % (by Tim Lueth, VLFL-Lib, 2022-MAI-13 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: tplot, tplotangle, tplotaxis, tplotcolored, SGruler, rulerCPL % % tplotruler([T,z,s,st]) % === INPUT PARAMETERS === % T: Frame to start the ruler along ez % z: sequence of z values % s: size; default is 15 % st: z values; default is "delta", other is "coord" % % See also: tplot, tplotangle, tplotaxis, tplotcolored, SGruler, rulerCPL % % % Copyright 2022 Tim C. Lueth |
PLrhombus(d,h,a)- Point list of a rhombus |
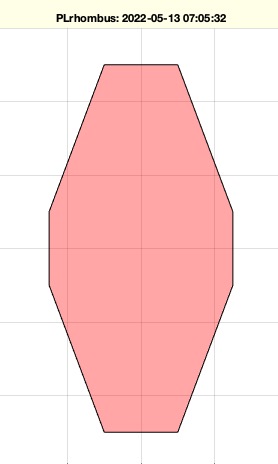 | % PLrhombus(d,h,a) - Point list of a rhombus % (by Tim Lueth, VLFL-Lib, 2022-MAI-12 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 5.2 % % See also: PLinbus, PLcircseg, PLevolvente, PLgearDIN, PLhelix, % PLkidney, PLrand, PLspiral, PLsquare, PLstar, PLcircleoval, PLtubbing, % PLarrow, CPLcirclesofPL % % PL=PLrhombus([d,h,a]) % === INPUT PARAMETERS === % d: diameter in x; default is [6 6 5 2]); % h: y value for each diameter; default is [0 3 4 15] % % a: turning angle after design; default is 0 rad % === OUTPUT RESULTS ====== % PL: % % EXAMPLE: % PLrhombus([5 5 2],[0 2 10]) % % See also: PLinbus, PLcircseg, PLevolvente, PLgearDIN, PLhelix, % PLkidney, PLrand, PLspiral, PLsquare, PLstar, PLcircleoval, PLtubbing, % PLarrow, CPLcirclesofPL % % % Copyright 2022 Tim C. Lueth |
SGTremovedistframes(SG)- removes frames that are outside the bounding box of the surface of a solid |
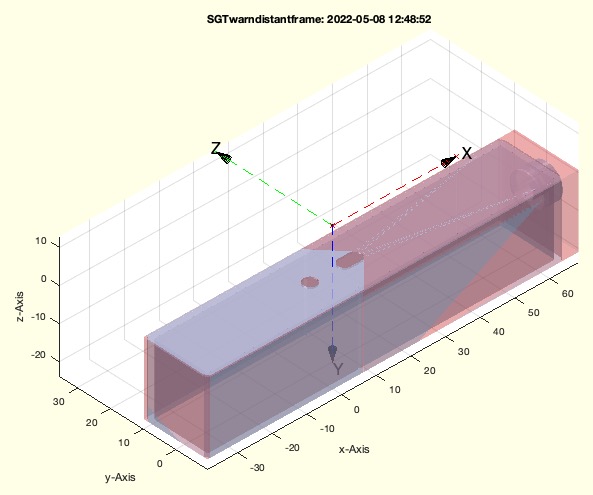 | % SGTremovedistframes(SG) - removes frames that are outside the bounding box of the surface of a solid % (by Tim Lueth, VLFL-Lib, 2022-MAI-08 as class: KINEMATICS AND FRAMES) % % The SG-Lib writes out STL files including frames! Nevertheless, some % slicer such as the Ultimaker CURA slicer have problems with Solids that % have far distant frames, and the solid surface is not sliced on the % base plate but in distant from the ground. Therefor, starting from % SG-Lib 5.2, SGwriteSTL will not export the distant frames if not % explicitly mentioned (Status of: 2022-05-08) % % Introduced first in SolidGeometry 5.2 % % See also: SGwriteSTL % % [SG,ww]=SGTremovedistframes(SG) % === INPUT PARAMETERS === % SG: Solid Geometry with frames. % === OUTPUT RESULTS ====== % SG: Solid Geometry will all frames removed that are outside the BB of SG % ww: true if any frames was removed % % EXAMPLE: % SGTremovedistframes(SGbox); % SGTremovedistframes(SGTset(SGbox,'OUT',TofP([30 30 30]))); % % See also: SGwriteSTL % % % Copyright 2022 Tim C. Lueth |
Videoquickanimatego(dw,i,i,i)- rotates a set of graphics objects around axis in different speed radios |
 | % Videoquickanimatego(dw,i,i,i) - rotates a set of graphics objects around axis in different speed radios % (by Tim Lueth, VLFL-Lib, 2022-MAI-07 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: animatego, Videoquickcloseandopen, Videoquickrotate3D, % Videoquickstart, Videoquickwritegcf, Videoquickwritetextpage % % hh=Videoquickanimatego([dw,i,i,i]) % === INPUT PARAMETERS === % dw: [steps angle]; default is [60 2*pi] % i: {handle frame ratio style}; default is ['',eye(4),1 'rotz'] % i: {handle frame ratio style}; default is ['',eye(4),1 'rotz'] % i: {handle frame ratio style}; default is ['',eye(4),1 'rotz'] % === OUTPUT RESULTS ====== % hh: array of handles % % EXAMPLE: % SGfigure(-30,30); % Videoquickanimatego('',{SGplotalpha(SGbox,'g'),'',5},SGplotalpha(SGtransP(SGbox,[50 0 0]))) % SGfigure(-30,30); % Videoquickanimatego('',{SGplotalpha(SGbox,'g'),'',5,'linz'},SGplotalpha(SGtransP(SGbox,[50 0 0]))) % % See also: animatego, Videoquickcloseandopen, Videoquickrotate3D, % Videoquickstart, Videoquickwritegcf, Videoquickwritetextpage % % % Copyright 2022 Tim C. Lueth |
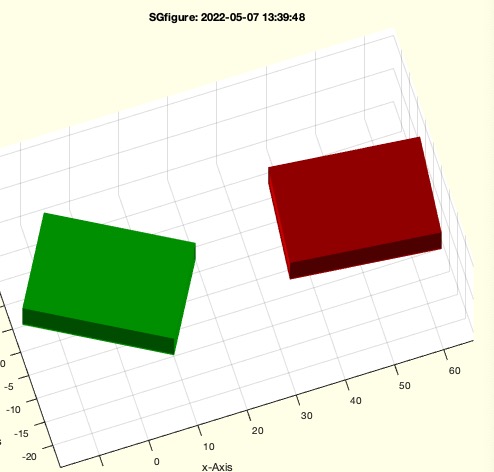
CPLremovethinwall(CPL,wall)- just removes thin walls from CPLS same as CPLdullededges and CPLremovebuffer |
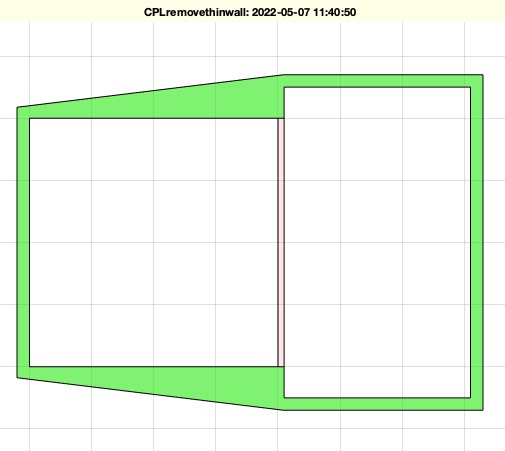 | % CPLremovethinwall(CPL,wall) - just removes thin walls from CPLS same as CPLdullededges and CPLremovebuffer % (by Tim Lueth, VLFL-Lib, 2022-MAI-07 as class: CLOSED POLYGON LISTS) % % Used in automatic design fnctn to avoid thin walls that will break % after printing or in use % same as CPLN=CPLbuffer(CPLbuffer(CPL,-d),d); % (Status of: 2022-05-07) % % Introduced first in SolidGeometry 5.2 % % See also: CPLremovebuffer, CPLdullededges, CPLremovearea % % CPLN=CPLremovethinwall([CPL,wall]) % === INPUT PARAMETERS === % CPL: CPL conotur % wall: minimal wall thickness; default is 1.2 % === OUTPUT RESULTS ====== % CPLN: New Contour without thin walls % % EXAMPLE: % CPL=CPLunion(PLsquare(40,40), PLsquare([30,50])+[36 0]); % CPL=CPLsubtract(CPLbuffer(CPLconvexhull(CPL),2),CPL); % CPLremovethinwall(CPL,0.5); % Wall remains % CPLremovethinwall(CPL,1); % Wall removed % % CPLremovebuffer(CPLsample(21),3) % CPLremovebuffer(CPLsample(21),4) % CPLdullededges(CPLsample(21),3/2) % CPLdullededges(CPLsample(21),4/2) % % See also: CPLremovebuffer, CPLdullededges, CPLremovearea % % % Copyright 2022 Tim C. Lueth |
SGseedcube(h)- Creates a small cube below the surface with just one Frame 'F" to start SGdesingconcepts |
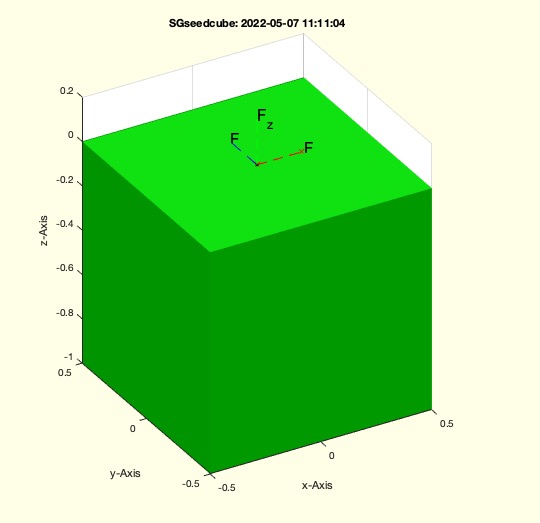 | % SGseedcube(h) - Creates a small cube below the surface with just one Frame 'F" to start SGdesingconcepts % (by Tim Lueth, VLFL-Lib, 2022-MAI-06 as class: AUTOMATIC DESIGN) % % SGdesignseed % depuseString('SGseedcube',true) (Status of: 2022-05-07) % % Introduced first in SolidGeometry 5.2 % % See also: SGtransrelSG % % SG0=SGseedcube([h]) % === INPUT PARAMETERS === % h: height (size) of cube); % === OUTPUT RESULTS ====== % SG0: A small cube [1 x 1 x h] with one Fram 'F" at position eye(4) % % EXAMPLE: % SGseedcube % % See also: SGtransrelSG % % % Copyright 2022 Tim C. Lueth |
animatego(h,T,w,style)- rotates one or several objects in a loop |
 | % animatego(h,T,w,style) - rotates one or several objects in a loop % (by Tim Lueth, VLFL-Lib, 2022-MAI-04 as class: VISUALIZATION) % % unfortuntately there is a need to redraw the parts, since SGTplotalpha % returns also handles to Frames. % This fnctn is used within Videoquickanimatego (Status of: 2022-05-08) % % Introduced first in SolidGeometry 5.2 % % See also: Videoquickanimatego, viewsmooth, Videoquickrotate3D, % figurerotate, drawnowvid % % h=animatego(h,T,w,[style]) % === INPUT PARAMETERS === % h: handle % T: Frame 4x4 % w: angle difference in ez % style: 'rotz' or 'linz'; default is 'rotz' % === OUTPUT RESULTS ====== % h: handle to new graphics object % % EXAMPLE: % close all; SGfigure(-30,30); A=SGbox; A=SGTretain(A,'F'); T=TofPez([30 0 50],[-1 -1 1]), % SGplotalpha(A,'g'); h=SGTplotalpha(SGtransT(A,T)); % for i=1:50; w=2*pi/50; h=animatego(h,T,w); drawnow; shg; end; % % [~,a,b]=SGgearpair; SGfigure(-30,30); ha=SGplotalpha(a); hb=SGplotalpha(b); % load ADAM_Amono.mat; b=SGconcat(b,SGmagnifyVL(ADAM_Amono,0.1),'center','ontop','alignfront',-3); % ha=SGplotalpha(a); hb=SGplotalpha(b); % while true; ha=animatego(ha,SGTget(a,'B'),0.1); hb=animatego(hb,SGTget(b,'F'),+0.1/2.5); % ch=get(gcf,'CurrentCharacter'); if uint8(ch)==27; break; end; drawnow; shg; end; % % See also: Videoquickanimatego, viewsmooth, Videoquickrotate3D, % figurerotate, drawnowvid % % % Copyright 2022 Tim C. Lueth |
TmirrorTxy(TA,T)- mirrors frames or cell list of frames |
 | % TmirrorTxy(TA,T) - mirrors frames or cell list of frames % (by Tim Lueth, VLFL-Lib, 2022-MAI-01 as class: KINEMATICS AND FRAMES) % % used in SGmirrorTxy (Status of: 2022-05-01) % % Introduced first in SolidGeometry 5.2 % % See also: SGmirrorTxy % % TB=TmirrorTxy(TA,[T]) % === INPUT PARAMETERS === % TA: frame or cell list of frames to be mirrored % T: mirror axis is given by ez, T, ez, 'x' % === OUTPUT RESULTS ====== % TB: mirrored fram of mirrored frame list % % See also: SGmirrorTxy % % % Copyright 2022 Tim C. Lueth |
SGcatheter(PLR,PLL,HLL)- Creates a solid of a catheter |
 | % SGcatheter(PLR,PLL,HLL) - Creates a solid of a catheter % (by Tim Lueth, VLFL-Lib, 2022-MAI-01 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGcatheterroller, SGcatheterfeeder % % [SGC,AParts]=SGcatheter([PLR,PLL,HLL]) % === INPUT PARAMETERS === % PLR: Diameter of segements; last value is diamter; default is [8 6 % 2.33] (8 French) % PLL: Length of segments; default is [2 25 20]); % HLL: Length and displacement of handle; default is [11 8] % === OUTPUT RESULTS ====== % SGC: SG of Catheter % AParts: Parts list % % EXAMPLE: % SGcatheter % SGcatheter([6.5 6 5 2.33],[10 16 3 10],[13 12]) % Green one for Philipp P % % See also: SGcatheterroller, SGcatheterfeeder % % % Copyright 2022 Tim C. Lueth |
TofSGez(SG,ez,alp)- finds simple angle by ez vector using SGTsetBF |
 | % TofSGez(SG,ez,alp) - finds simple angle by ez vector using SGTsetBF % (by Tim Lueth, VLFL-Lib, 2022-MAI-01 as class: KINEMATICS AND FRAMES) % % In contrast to TofSGMLez, this fnctn will find faces with similar % angles (Status of: 2022-06-17) % % Introduced first in SolidGeometry 5.2 % % See also: SGTsetBF, TofSGMLez, FSselect, TofcrossedSG % % [T,err]=TofSGez(SG,ez,[alp]) % === INPUT PARAMETERS === % SG: Solid Geometry % ez: desired ez vector % alp: allowed deviation; default is pi/4 % === OUTPUT RESULTS ====== % T: Found frame % err: angle difference between ez vectors % % EXAMPLE: % TofSGMLez(SGsample(3),[0 0 1]) % TofSGez(SGsample(3),[0 0 1]) % % See also: SGTsetBF, TofSGMLez, FSselect, TofcrossedSG % % % Copyright 2022 Tim C. Lueth |
SGextend(SG,T,b,typ,"debug")- just extends the solid in one direction |
 | % SGextend(SG,T,b,typ,"debug") - just extends the solid in one direction % (by Tim Lueth, VLFL-Lib, 2022-APR-30 as class: SURFACES) % % helpful for quick and dirty construction by try to avoid (Status of: % 2022-05-01) % % Introduced first in SolidGeometry 5.2 % % See also: TofSG, TofSGez, SGof2T, SGdesignSupplement2connect2SG, % SGof2SGT % % [SGN,SGS]=SGextend([SG,T,b,typ,"debug"]) % === INPUT PARAMETERS === % SG: Solid Geometry % T: cutting frame, or 'under (TofSG) or [0 0 -1] (TofSGez) % b: [extension intrusion] default is [4 -.5]; % typ: 'fill, sub, unite', default is 'unite' % "debug": if used; the fnctn shows the progress % === OUTPUT RESULTS ====== % SGN: extended Solid % SGS: Solid supplement % % EXAMPLE: % SGextend(SGsample(3),'under',4) % SGextend(SGsample(3),'under',4,'sub') % % See also: TofSG, TofSGez, SGof2T, SGdesignSupplement2connect2SG, % SGof2SGT % % % Copyright 2022 Tim C. Lueth |
whichSG(pat,"list4doc")- searches for patters in filenames of matlab files |
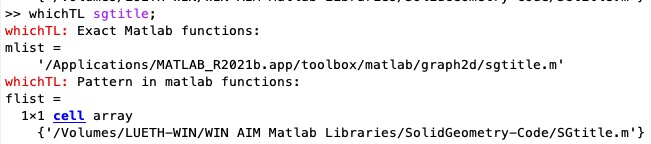 | % whichSG(pat,"list4doc") - searches for patters in filenames of matlab files % (by Tim Lueth, VLFL-Lib, 2022-APR-30 as class: FILE HANDLING) % % helps also to find fnctns in the sglib by using searchterm (Status of: % 2022-05-04) % % Introduced first in SolidGeometry 5.2 % % See also: which, SGexplain, depuseString, searchdirTL, whichTL % % [flist,mlist]=whichSG([pat,"list4doc"]) % === INPUT PARAMETERS === % pat: pattern to search % "list4doc": if used the output is given as string sequence too % === OUTPUT RESULTS ====== % flist: list fo files in working directory % mlist: matlab fnctns of this name % % EXAMPLE: % whichSG sgtitle % whichSG chain % finds all m files that contain chain in the name % % See also: which, SGexplain, depuseString, searchdirTL, whichTL % % % Copyright 2022 Tim C. Lueth |
axis4all(fig,axisparams)- applies the commands for axis to all subplots applies the commands for axis to all subplots |
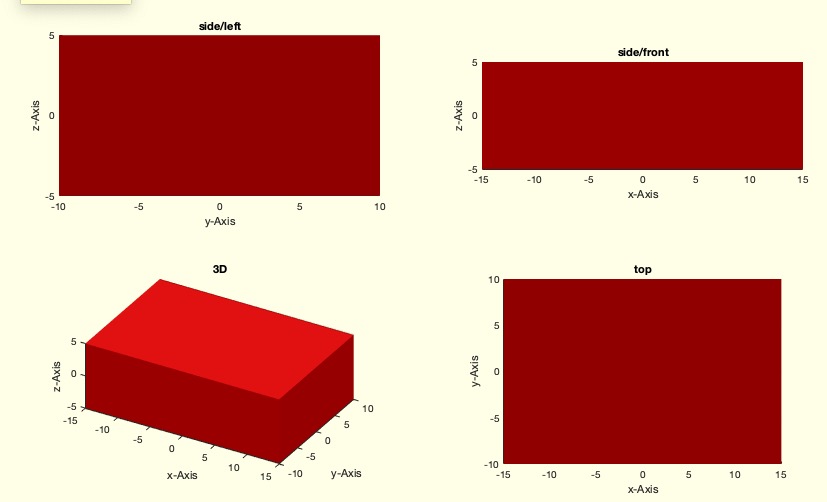 | % axis4all(fig,axisparams) - applies the commands for axis to all subplots applies the commands for axis to all subplots % (by Tim Lueth, VLFL-Lib, 2022-APR-28 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: axisscale, view4all % % axis4all([fig,axisparams]) % === INPUT PARAMETERS === % fig: default is gcf; no need to use it as first paramter % axisparams: list of parameters same as for axis % % EXAMPLE: % close all % SGsample; % or SGfigure; SGplot4(SGbox) % axisscale % axis4all('on','tight'); drawnow % axis4all(gcf, 'off'); drawnow % % % % See also: axisscale, view4all % % % Copyright 2022 Tim C. Lueth |
SGstampname(SG,txtparams)- creates a textfield to understand the parameters of the solid |
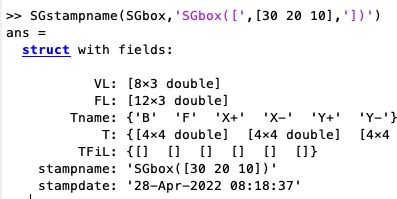 | % SGstampname(SG,txtparams) - creates a textfield to understand the parameters of the solid % (by Tim Lueth, VLFL-Lib, 2022-APR-28 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.2 % % See also: sprintftext % % SG=SGstampname(SG,[txtparams]) % === INPUT PARAMETERS === % SG: Solid Geometry % txtparams: parameter to create a string such as in sprintftext % === OUTPUT RESULTS ====== % SG: SG including stampname and stampdate % % % EXAMPLE: % SGstampname(SGbox,'SGbox([',[30 20 10],'])') % % See also: sprintftext % % % Copyright 2022 Tim C. Lueth |
PLvaryfrom(VL,dd,rr)- simply adds small values in a determinstic way to a point list |
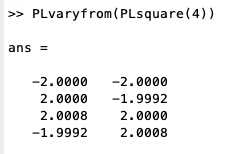 | % PLvaryfrom(VL,dd,rr) - simply adds small values in a determinstic way to a point list % (by Tim Lueth, VLFL-Lib, 2022-APR-26 as class: AUXILIARY PROCEDURES) % % The set of fnctns % VLvaryfrom, PLvaryfrom, TLvaryfrom, SGvaryfrom % tries to compensate the weakness of the boolean operations in % combination with the weakness of 64 Bit numeric and the weakness of the % delaunay implementation of matlab. % this fnctn takes a solid and adds small values to the position of the % solid to avoid problems with boolean operations! % Helpful in combination with SGunion, SGsubtract and SGsubtractnaddTL % (Status of: 2022-04-26) % % Introduced first in SolidGeometry 5.2 % % See also: TLvaryfrom, VLvaryfrom, SGvaryfrom % % VLN=PLvaryfrom(VL,[dd,rr]) % === INPUT PARAMETERS === % VL: point list % dd: [dx dy dz]; default is [1 1 1]/1234 % rr: [wx wy wz]; default is [1 1 1]*34/14333 % === OUTPUT RESULTS ====== % VLN: New point list % % EXAMPLE: % PLvaryfrom(PLsquare(4)) % % See also: TLvaryfrom, VLvaryfrom, SGvaryfrom % % % Copyright 2022 Tim C. Lueth |
VLvaryfrom(VL,dd,rr)- simply adds small values in a determinstic way to a vertex list |
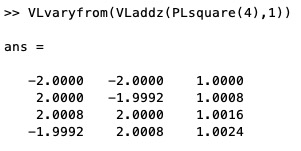 | % VLvaryfrom(VL,dd,rr) - simply adds small values in a determinstic way to a vertex list % (by Tim Lueth, VLFL-Lib, 2022-APR-26 as class: AUXILIARY PROCEDURES) % % The set of fnctns % VLvaryfrom, PLvaryfrom, TLvaryfrom, SGvaryfrom % tries to compensate the weakness of the boolean operations in % combination with the weakness of 64 Bit numeric and the weakness of the % delaunay implementation of matlab. % this fnctn takes a solid and adds small values to the position of the % solid to avoid problems with boolean operations! % Helpful in combination with SGunion, SGsubtract and SGsubtractnaddTL % (Status of: 2022-04-26) % % Introduced first in SolidGeometry 5.2 % % See also: TLvaryfrom, PLvaryfrom, SGvaryfrom % % VLN=VLvaryfrom(VL,[dd,rr]) % === INPUT PARAMETERS === % VL: Vertex list % dd: [dx dy dz]; default is [1 1 1]/1234 % rr: [wx wy wz]; default is [1 1 1]*34/14333 % === OUTPUT RESULTS ====== % VLN: New vertex list % % EXAMPLE: % VLvaryfrom(VLaddz(PLsquare(4),1)) % % See also: TLvaryfrom, PLvaryfrom, SGvaryfrom % % % Copyright 2022 Tim C. Lueth |
SGvaryfrom(SG,)- simply adds small values in a determinstic way to the vertices of a solid |
 | % SGvaryfrom(SG,) - simply adds small values in a determinstic way to the vertices of a solid % (by Tim Lueth, VLFL-Lib, 2022-APR-26 as class: SURFACES) % % The set of fnctns % VLvaryfrom, PLvaryfrom, TLvaryfrom, SGvaryfrom % tries to compensate the weakness of the boolean operations in % combination with the weakness of 64 Bit numeric and the weakness of the % delaunay implementation of matlab. % this fnctn takes a solid and adds small values to the position of the % solid to avoid problems with boolean operations! % Helpful in combination with SGunion, SGsubtract and SGsubtractnaddTL % (Status of: 2022-04-26) % % Introduced first in SolidGeometry 5.2 % % See also: TLvaryfrom, VLvaryfrom, PLvaryfrom % % SGN=SGvaryfrom(SG,[]) % === INPUT PARAMETERS === % SG: Solid to be modified % === OUTPUT RESULTS ====== % SGN: Solid with slightly adjusted coordinates % % EXAMPLE: % load ADAM_Aframes.mat; % SGvaryfrom(ADAM_Aframes) % Natural Solid ==> Most probably only a few changes % SGvaryfrom(SGbox) % Ideal geometry ==> Almost all coordinates are changed % % See also: TLvaryfrom, VLvaryfrom, PLvaryfrom % % % Copyright 2022 Tim C. Lueth |
SGdesignPintle(MM,sl)- Designs a simple pindle bolt connection |
 | % SGdesignPintle(MM,sl) - Designs a simple pindle bolt connection % (by Tim Lueth, VLFL-Lib, 2022-APR-25 as class: AUTOMATIC DESIGN) % % In contrast to other SGdesing fnctns, the "screw", the SG of the bolt % is designed using slfit('b'). % Reason is that this solid should have after print out the nominal value % and not just shown in Simulation! (Status of: 2022-04-26) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignDIN7991, SGsubtractnaddTL % % [Hsub,Nsub,SGB,Hadd,Nadd,AParts]=SGdesignPintle([MM,sl]) % === INPUT PARAMETERS === % MM: default is [3 6 0 0]; [M-Bolt Length overlength and spacer]; % default [2.5 6 0 0] % sl: default is 'tt' for transition and clearance fittion on head side % and nut side % === OUTPUT RESULTS ====== % Hsub: Subtraction solid on head side % Nsub: Subtraction solid on nut side % SGB: SG of Bolt USED TO BE PRINTED OUT! % Hadd: Supplement solid on head side % Nadd: Supplement solid on nut side % AParts: Parts list % % EXAMPLE: % SGdesignPintle % % See also: SGdesignDIN7991, SGsubtractnaddTL % % % Copyright 2022 Tim C. Lueth |
CPLdistancewall(CPLo,CPLi)- returns the minimal wall thickness between 2 CPLs or a region |
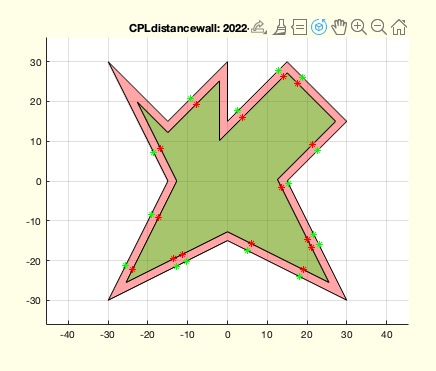 | % CPLdistancewall(CPLo,CPLi) - returns the minimal wall thickness between 2 CPLs or a region % (by Tim Lueth, VLFL-Lib, 2022-APR-25 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: VLnearestNeighbor % % [wmin,wmax]=CPLdistancewall([CPLo,CPLi]) % === INPUT PARAMETERS === % CPLo: Outer CPL % CPLi: Innver CPL % === OUTPUT RESULTS ====== % wmin: maximal wall thickness % wmax: maximal wall thickness % % EXAMPLE: % CPL=CPLsample(3)*3; w=2; CPL=CPLsubtract(CPL,CPLbuffer(CPL,-2)); SGofCPLz(CPL,50); SG=ans; % CPLdistancewall(CPL) % % See also: VLnearestNeighbor % % % Copyright 2022 Tim C. Lueth |
exp_2022_04_25_Adam- EXPERIMENT JUST TO INSERT A MOTOR INTO ADAM |
 | % exp_2022_04_25_Adam - EXPERIMENT JUST TO INSERT A MOTOR INTO ADAM % (by Tim Lueth, VLFL-Lib, 2022-APR-25 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 5.2 % % See also: exp_2020_09_07_ADAM_NEW, SGdesignMotorN40horiz, % exp_2022_04_21_ADAM_MOTORS % % exp_2022_04_25_Adam % % See also: exp_2020_09_07_ADAM_NEW, SGdesignMotorN40horiz, % exp_2022_04_21_ADAM_MOTORS % % % Copyright 2022 Tim C. Lueth |
SGof2CPLtransition4FDM(CPLB0,CPLi,rmin,alpha)- creates transition solid to avoid support structures for FDM printer |
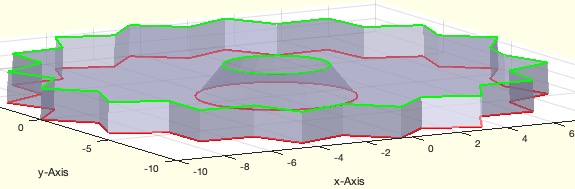 | % SGof2CPLtransition4FDM(CPLB0,CPLi,rmin,alpha) - creates transition solid to avoid support structures for FDM printer % (by Tim Lueth, VLFL-Lib, 2022-APR-23 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: SGof2CPLzheurist % % [EE,hE]=SGof2CPLtransition4FDM(CPLB0,CPLi,[rmin,alpha]) % === INPUT PARAMETERS === % CPLB0: Lower Contour % CPLi: Higher Contour % rmin: optional minimal angle % alpha: optional transition angle; default is 50/180*pi % === OUTPUT RESULTS ====== % EE: Transition solid % hE: height of EE in z % % EXAMPLE: % % SGof2CPLtransition4FDM(CPLsubtract(PLstar(10),PLcircle(3)),CPLsubtract(PLstar(10),PLcircle(2))) % % See also: SGof2CPLzheurist % % % Copyright 2022 Tim C. Lueth |
view4all(AZ,EL)- sets the view angles for all subplots the same |
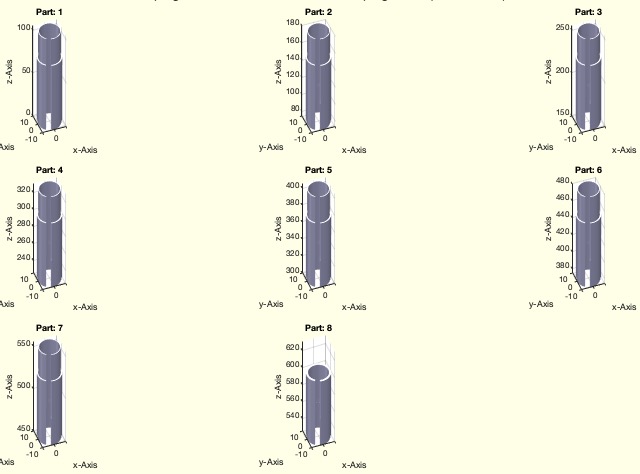 | % view4all(AZ,EL) - sets the view angles for all subplots the same % (by Tim Lueth, VLFL-Lib, 2022-APR-23 as class: VISUALIZATION) % % This a fnctn of a set of fnctns the modify all subplots of a figure % (Status of: 2022-04-23) % % Introduced first in SolidGeometry 5.2 % % See also: axisscale, view, SGplotcellmultiple % % view4all([AZ,EL]) % === INPUT PARAMETERS === % AZ: azimut angle; default is AZ of gca % EL: elevation angle; default is EL of gca % % EXAMPLE: % A=SGbox([5,5,5]); B=SGbox(20,30,10); SG={A,B}; SGplotcellmultiple(SG); % view4all % use AZ,EL of last gca % view4all(0,90) % set all AZ and EL to [0,90] % % See also: axisscale, view, SGplotcellmultiple % % % Copyright 2022 Tim C. Lueth |
SGofCPLzplugin(CPL,z,l)- created extruded solids that can be pluged in if they are very long |
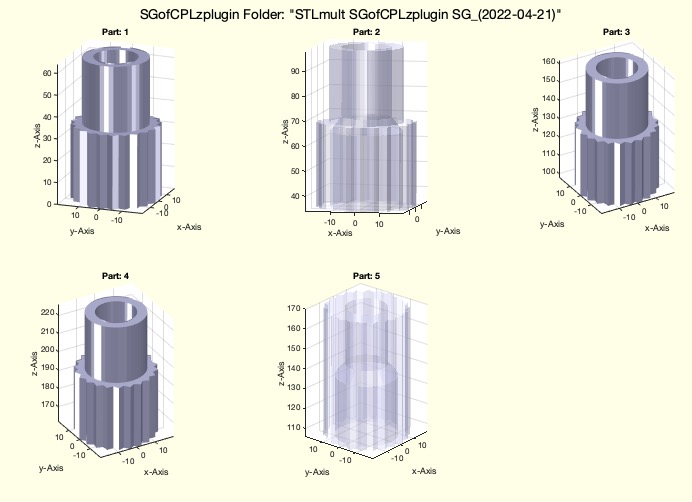 | % SGofCPLzplugin(CPL,z,l) - created extruded solids that can be pluged in if they are very long % (by Tim Lueth, VLFL-Lib, 2022-APR-21 as class: AUTOMATIC DESIGN) % % helpful for rail covers of robots or other long tubes etc. % This fnctn doen not creates caps yet but allowes open CPLs in contrast % to SGplugintube (Status of: 2022-04-21) % % Introduced first in SolidGeometry 5.2 % % See also: SGplugintube % % SG=SGofCPLzplugin(CPL,[z,l]) % === INPUT PARAMETERS === % CPL: CPL consisting of a an inner and outer contour % z: [zmin zmax]; default ist [0 length] % l: [segement-length overlapp] default is [160 30]; % === OUTPUT RESULTS ====== % SG: cell list of segments % % EXAMPLE: % SGofCPLzplugin(CPLsubtract(PLstar(20),PLcircle(10)),170,[65]) % SGofCPLzplugin(CPLsample(18),170,[65]) % SGofCPLzplugin(CPLsample(30),170,[65]) % % See also: SGplugintube % % % Copyright 2022 Tim C. Lueth |
exp_2022_04_21_ADAM_MOTORS- EXPERIMENT TO SHOW THE SIMPLICITY OF INTEGRATING DRIVES INTO BODIES |
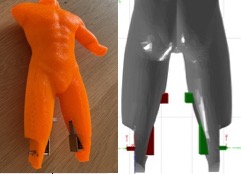 | % exp_2022_04_21_ADAM_MOTORS - EXPERIMENT TO SHOW THE SIMPLICITY OF INTEGRATING DRIVES INTO BODIES % (by Tim Lueth, VLFL-Lib, 2022-APR-21 as class: EXPERIMENTS) % % While in exp_2020_09_07_ADAM_NEW screws were used, in this experiment % exp_2022_04_21_ADAM_MOTORS we use the Chihai GW12-N20 Encoder motors % (Status of: 2022-04-21) % % Introduced first in SolidGeometry 5.2 % % See also: exp_2020_09_07_ADAM_NEW, SGdesignMotorN40horiz % % exp_2022_04_21_ADAM_MOTORS % % See also: exp_2020_09_07_ADAM_NEW, SGdesignMotorN40horiz % % % Copyright 2022 Tim C. Lueth |
SGplugintube(RR,LL,sl,"cap","close")- create a tube that can be elongated piece by piece |
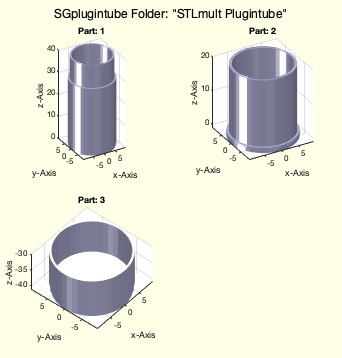 | % SGplugintube(RR,LL,sl,"cap","close") - create a tube that can be elongated piece by piece % (by Tim Lueth, VLFL-Lib, 2022-APR-19 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGofCPLzplugin, SGcylinder, SGofCPLrot, SGofCPLCVLR % % [SG,SGB,SGC,AParts]=SGplugintube([RR,LL,sl,"cap","close"]) % === INPUT PARAMETERS === % RR: [Ri Wt n] [Inner-Radius wall-thickness edges]; default is [8.0 1.5 % 0]; Minimal wall size is 1.5mm % LL: [LL LU LO] [length lower-overlap top-overlap]; default is [160 30 % 30] % sl: slot size to increase % "cap": if used there will be caps to plug-in % "close": if closed (LL(2)==0 || LL(3)==0; floor and/or the top are % closed % === OUTPUT RESULTS ====== % SG: Solid of the tube % SGB: lower cap % SGC: top cap % AParts: Parts-List % % EXAMPLE: % SGplugintube('',[40 20 10],'cap'); % SGplugintube('',[40 20 10]); % SGplugintube('',[40 0 0],'close'); % Hollow solid % SGplugintube([15/2 1.5 4],[60 20]); % Square % % See also: SGofCPLzplugin, SGcylinder, SGofCPLrot, SGofCPLCVLR % % % Copyright 2022 Tim C. Lueth |
TLvaryfrom(TL,dd,rr)- this fnct takes a frame list and adds small values to the position and orientation |
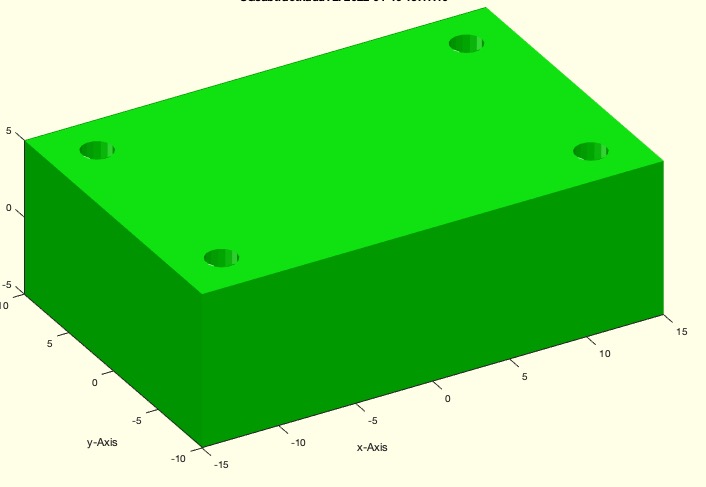 | % TLvaryfrom(TL,dd,rr) - this fnct takes a frame list and adds small values to the position and orientation % (by Tim Lueth, VLFL-Lib, 2022-APR-19 as class: KINEMATICS AND FRAMES) % % The set of fnctns % VLvaryfrom, PLvaryfrom, TLvaryfrom, SGvaryfrom % tries to compensate the weakness of the boolean operations in % combination with the weakness of 64 Bit numeric and the weakness of the % delaunay implementation of matlab. % this fnctn takes a frame list and adds small values to the position % and orientation to avoid problems with boolean operations! % Helpful in combination with SGunion, SGsubtract and SGsubtractnaddTL % (Status of: 2022-04-26) % % Introduced first in SolidGeometry 5.2 % % See also: TcopyVLez, TLofPL, SGsubtractnaddTL % % TLN=TLvaryfrom(TL,[dd,rr]) % === INPUT PARAMETERS === % TL: Frame list % dd: [dx dy dz] = default is [1 1 1]/1234 % rr: [wx wy wz]; default is [1 1 1]*34/14333 % % === OUTPUT RESULTS ====== % TLN: modified frame list % % EXAMPLE: % A=SGTremove(SGbox); SGfigure (-30,30); SGplotalpha(A,'w',0.9); % [~,~,TL]=CPLofSGTez(A,[0 0 1],[4 1 2],'style','grid'); tplot(TL,0); shg % SGsubtractnaddTL(A,SGcylinder(1,[-2 2]),TL) % SGsubtractnaddTL(A,SGcylinder(1,[-2 2]),TLvaryfrom(TL)) % % See also: TcopyVLez, TLofPL, SGsubtractnaddTL % % % Copyright 2022 Tim C. Lueth |
SGdesignMotorN40horiz(LM,sh,sz,gb,PL)- Designs a subtraction solids for the N20 L-type encoder motor |
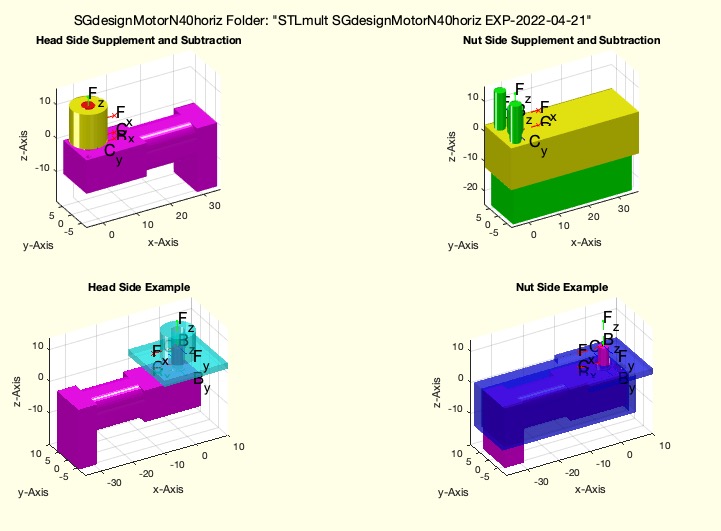 | % SGdesignMotorN40horiz(LM,sh,sz,gb,PL) - Designs a subtraction solids for the N20 L-type encoder motor % (by Tim Lueth, VLFL-Lib, 2022-APR-19 as class: AUTOMATIC DESIGN) % % The default motor is a Chihai GW12-N20 Encoder (Status of: 2022-04-21) % % Introduced first in SolidGeometry 5.2 % % See also: SGmotorN40horiz, SGdesignMotorN40, SGmotorN40 % % [Hsub,Nsub,SGM,Hadd,Nadd,AParts]=SGdesignMotorN40horiz([LM,sh,sz,gb,PL]) % === INPUT PARAMETERS === % LM: [housinh-height wall-thickness topwall-thickness rotation-angle] % default is [14 1.5 2 0] % sh: Shaft Diameter and Shaft Flattening; default is [3 2.5] % sz: [maxsize-x maxsize-y length-shaft diameter shaft-socket, height % shaft-socket]; default is [10 12 6.5 4 .5] % gb: gearbox [size-x size-y height motor-length Mscrews xshift yshift]; % default is [18 12 10 14 1.6 5 0] % PL: Point list of screws; default is [-2.5 -4.5;-2.5 +4.5] % === OUTPUT RESULTS ====== % Hsub: Head Subtraction Solid (Shaft Side) % Nsub: Nut Subtraction Solid (Motor Side) % SGM: Motor Geometry % Hadd: Head Supplement (Shaft Side) % Nadd: Nut Supplement (Motor Side) % AParts: Part list % % Additional Hyperlinks: % Chihai GW12-N20 Encoder % % EXAMPLE: % SGdesignMotorN40horiz % [Hsub,Nsub,SGM,Hadd,Nadd,AParts]=SGdesignMotorN40horiz % A=SGbox([20,20,2]); B=A; A=SGTretain(A,'F'); B=SGTretain(B,'B'); A=SGtransP(A,[1 1 1]/1000); B=SGtransrelSG(B,A,'alignT',{'B','F'}); % % A=SGunion(A,Nadd,'alignT',{'C','F'}); A=SGsubtract(A,Nsub,'alignT',{'C','F'}); SGfigure; SGplotalpha(A); % % B=SGunion(B,Hadd,'alignT',{'C','B'}); B=SGsubtract(B,Hsub,'alignT',{'C','B'}); SGfigure; SGplotalpha(B); % % % See also: SGmotorN40horiz, SGdesignMotorN40, SGmotorN40 % % % Copyright 2022 Tim C. Lueth |
exp_2022_04_19_numbers(n)- experiment for formating numbers wrt exp(1), pi, 2^ as fractions |
 | % exp_2022_04_19_numbers(n) - experiment for formating numbers wrt exp(1), pi, 2^ as fractions % (by Tim Lueth, VLFL-Lib, 2022-APR-19 as class: EXPERIMENTS) % % rats(pi) => pi= 355/113 % rats(exp(1)) => e = 1457/536 % (Status of: 2022-04-19) % % Introduced first in SolidGeometry 5.2 % % See also: rats % % fnn=exp_2022_04_19_numbers([n]) % === INPUT PARAMETERS === % n: number % === OUTPUT RESULTS ====== % fnn: string of number % % EXAMPLE: % exp_2022_04_19_numbers(1/19) % exp_2022_04_19_numbers(1/19*exp(1)) % exp_2022_04_19_numbers(1/19*pi) % exp_2022_04_19_numbers(2^(1/19)) % % % See also: rats % % % Copyright 2022 Tim C. Lueth |
SGjuicermachineclip(name)- A missing useful part for the Bosch juicer machine |
 | % SGjuicermachineclip(name) - A missing useful part for the Bosch juicer machine % (by Tim Lueth, VLFL-Lib, 2022-APR-17 as class: MODELING PROCEDURES) % % Introduced first in SolidGeometry 5.2 % % See also: SGcompass % % SGB=SGjuicermachineclip([name]) % === INPUT PARAMETERS === % name: Name string on back side % === OUTPUT RESULTS ====== % SGB: Solid Geomerty to print % % EXAMPLE: % SGjuicermachineclip % % See also: SGcompass % % % Copyright 2022 Tim C. Lueth |
SGmotorN40horiz(sh,sz,gb,PL)- returns the Geometry of a N20 HEININGER Motor with 90 degree flansch |
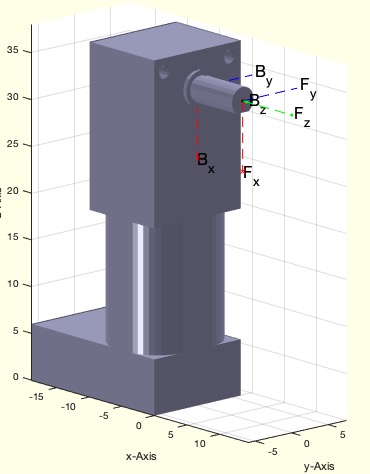 | % SGmotorN40horiz(sh,sz,gb,PL) - returns the Geometry of a N20 HEININGER Motor with 90 degree flansch % (by Tim Lueth, VLFL-Lib, 2022-APR-16 as class: MODELING PROCEDURES) % % Helps to design motor driven mechanisms % Example for designing such components using % PARTS: SGpartslist, SGpartsfuncparams, sprintftext, SGpartslistastext % SHAPE: sprintftext, SGofCPLcommand, TcopyVLez, SGsubtractnaddTL % (Status of: 2022-04-25) % % Introduced first in SolidGeometry 5.2 % % See also: SGbatteriepack, SGmotorSolExpert, SGcapontop, SGmotorshaft, % SGmotorhousing, SGmotorN40, SGdesignMotorN40horiz % % SG=SGmotorN40horiz([sh,sz,gb,PL]) % === INPUT PARAMETERS === % sh: Shaft Diameter and Shaft Flattening; default is [3 2.5] % sz: [maxsize-x maxsize-y length-shaft diameter shaft-socket, height % shaft-socket]; default is [10 12 6.5 4 .5] % gb: gearbox [size-x size-y height motor-length Mscrews shift-x % shift-y]; default is [18 12 10 14 1.6 5 0] % PL: Point list of screws; default is [-2.5 -4.5;-2.5 +4.5] % === OUTPUT RESULTS ====== % SG: Solid Geometry of a N20 Motor by Sebastian Heininger Selection % % Additional Hyperlinks: % Chihai GW12-N20 Encoder , Controller % % EXAMPLE: % SGmotorN40horiz % % See also: SGbatteriepack, SGmotorSolExpert, SGcapontop, SGmotorshaft, % SGmotorhousing, SGmotorN40, SGdesignMotorN40horiz % % % Copyright 2022 Tim C. Lueth |
SGpartslistastext(oldlist,addlist)- appends parts as text lines to a parts list and returns text lines |
 | % SGpartslistastext(oldlist,addlist) - appends parts as text lines to a parts list and returns text lines % (by Tim Lueth, VLFL-Lib, 2022-APR-15 as class: AUTOMATIC DESIGN) % % VERY SIMILAR AS SGpartslist but based noct on cell lists but on text % lines (easier to understand and use) % new parts are added by a string such as % % % % Introduced first in SolidGeometry 5.2 % % See also: SGpartslist, sprintftext, SGpartsfuncparams, % SGwriteMultipleSTL % % [newlist,AParts]=SGpartslistastext(oldlist,[addlist]) % === INPUT PARAMETERS === % oldlist: parts list or empty as text string or cell list % addlist: parts list to add as as text string or cell list % === OUTPUT RESULTS ====== % newlist: parts list as text list % AParts: parts list as cell list % % EXAMPLE: % SGpartslist([],'DIN912','DIN985','DINX'); pp=ans % SGpartslist(pp,'2 DIN912','3 DIN985','4 * DINX'); pp2=ans % SGpartslist(pp,pp2); pp3=ans % [~,b]=SGpartslist(pp,pp2) % [~,b]=SGpartslist([],b,b,b,b) % % See also: SGpartslist, sprintftext, SGpartsfuncparams, % SGwriteMultipleSTL % % % Copyright 2022 Tim C. Lueth |
sprintftext(textelementlist)- creates as simple as possible a string for design parameters |
 | % sprintftext(textelementlist) - creates as simple as possible a string for design parameters % (by Tim Lueth, VLFL-Lib, 2022-APR-14 as class: AUXILIARY PROCEDURES) % % Originally written for SGpartslist but extremely helpful also for % SGofCPLcommand (Status of: 2022-04-14) % % Introduced first in SolidGeometry 5.2 % % See also: SGpartslist, SGofCPLcommand, SGpartsfuncparams, % SGwriteMultipleSTL % % txt=sprintftext([textelementlist]) % === INPUT PARAMETERS === % textelementlist: list of numbers, chars, and textlines % === OUTPUT RESULTS ====== % txt: string to bu used for fprintf or SGpartslist % % EXAMPLE: % d=4; l=5; cmd=sprintftext('c ',d,', h ',l), SGofCPLcommand(cmd) % sprintftext(1,' DIN7991 Screw ',2.5,'x',6,'mm') % % %% FULL CONCEPT USE % AParts=SGpartslist({},SGpartsfuncparams(1,2,3)); % Creates Partslist % for i=1:size(TL,3); % AParts=SGpartslist(AParts,sprintftext(1,'DIN7991 M',MM(1),'x',MM(2),'mm')); % end % [~,partext]=SGpartslist(AParts); SGwriteMultipleSTL({SGW},'','',partext); % % % See also: SGpartslist, SGofCPLcommand, SGpartsfuncparams, % SGwriteMultipleSTL % % % Copyright 2022 Tim C. Lueth |
CPLofSGprojection(SG,T)- returns a projection contour of a solid using the graphics board |
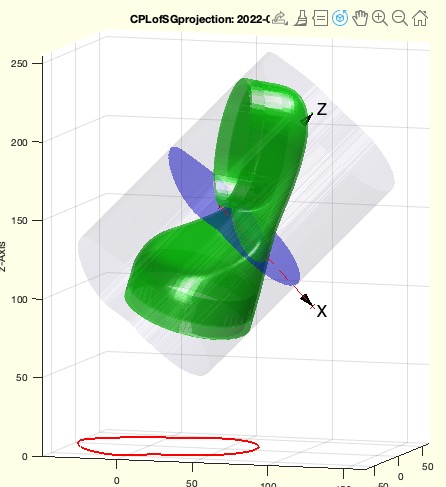 | % CPLofSGprojection(SG,T) - returns a projection contour of a solid using the graphics board % (by Tim Lueth, VLFL-Lib, 2022-APR-14 as class: CLOSED POLYGON LISTS) % % First version of 2021-08-11 by Tim Lueth % Limited resolution (Status of: 2022-04-14) % % Introduced first in SolidGeometry 5.2 % % See also: CPLofgcaprojection % % [CPL,CVL]=CPLofSGprojection(SG,[T]) % === INPUT PARAMETERS === % SG: Solid Geometry % T: Projektion Orientation or just ez vctor; default is eye(4) % === OUTPUT RESULTS ====== % CPL: CPL to be projected using T % CVL: CVL already projected CPL % % EXAMPLE: % load JACO_robot.mat % close all; CPLofSGprojection (JC1,[1 1 1]); % CPLofSGprojection(SGsample(45) % CPLofSGprojection(SGtransT(JC1,TofR([1 2 3]/2/pi)),[1 0 1]); % % See also: CPLofgcaprojection % % % Copyright 2022 Tim C. Lueth |
SGpartsfuncparams(params)- creates a documentation string to explain the fnct call including all parameters |
 | % SGpartsfuncparams(params) - creates a documentation string to explain the fnct call including all parameters % (by Tim Lueth, VLFL-Lib, 2022-APR-13 as class: AUXILIARY PROCEDURES) % % In parameterized design, it is very easy to create very different STL % structures during an experimental design process. Unfortunately, it is % almost impossible to remember a few days later the exact parameter set % used to create these parameterized (automatically designed) structures. % Therefore this fnctn creates a string that can be used in combination % with SGpartslist to add the parameter set to the part list and with % SGwriteMultipleSTL to add the fnctn parameter set to the directory % containing the final STL set (Status of: 2022-04-16) % % Introduced first in SolidGeometry 5.2 % % See also: SGpartslist, sprintftext, SGwriteMultipleSTL % % txt=SGpartsfuncparams([params]) % === INPUT PARAMETERS === % params: exact same list of parameters as used in fnctn definition % === OUTPUT RESULTS ====== % txt: resulting text % % EXAMPLE: % Just call this fnct with the same parameter list as the mother fncts to create the string % SGpartsfuncparams(12,13,'t',[1 1.5 2 12 23 34.0 pi]) % % txt=SGpartsfuncparams(MA,p,CPL,sl,BL) % Same order of parameters as used in the fncts definition % % [AParts,partext]=SGpartslist({},SGpartsfuncparams(MA,p,CPL,sl,BL)); % Same order of parameters as used in the fncts definition % SGwriteMultipleSTL({A,B,C,E},'','',partext); % % % See also: SGpartslist, sprintftext, SGwriteMultipleSTL % % % Copyright 2022 Tim C. Lueth |
SGsubtractnaddTL(SGA,SGSUB,TLX,SGADD,TSA)- Basic fnct to support repeated frame based union and subtraction of solids |
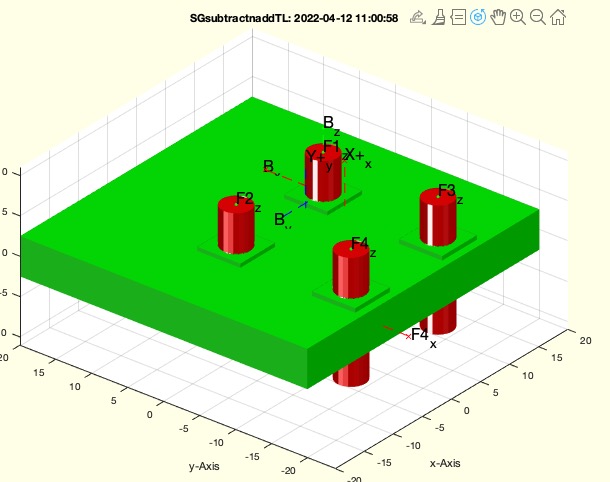 | % SGsubtractnaddTL(SGA,SGSUB,TLX,SGADD,TSA) - Basic fnct to support repeated frame based union and subtraction of solids % (by Tim Lueth, VLFL-Lib, 2022-APR-12 as class: PARAMETRIC DESIGN) % % Make sure to avoid in parallel lines in TLX (Status of: 2022-04-12) % % Introduced first in SolidGeometry 5.2 % % See also: SGsubtract, SGunion % % SGA=SGsubtractnaddTL(SGA,[SGSUB,TLX,SGADD,TSA]) % === INPUT PARAMETERS === % SGA: SOlid to add first and subtract later % SGSUB: SUBTRACTION SOLID % TLX: List of Frames relative to SGA % SGADD: SUPPLEMENT SOLID % TSA: Frame relative to SGSUB and SGADD; default is 'C' % === OUTPUT RESULTS ====== % SGA: Final solid % % See also: SGsubtract, SGunion % % % Copyright 2022 Tim C. Lueth |
SGdesignSupplementPlugin(SGA,wt,sl,ez,CPL,fill)- designs a plugin holder for another solid |
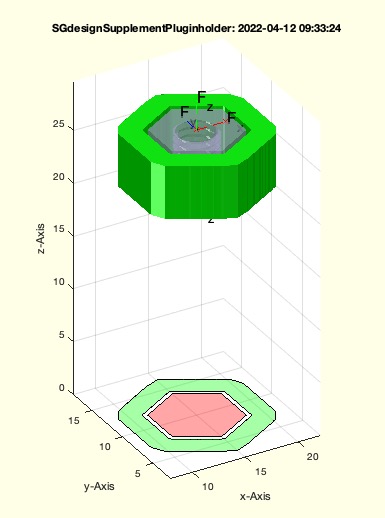 | % SGdesignSupplementPlugin(SGA,wt,sl,ez,CPL,fill) - designs a plugin holder for another solid % (by Tim Lueth, VLFL-Lib, 2022-APR-12 as class: AUTOMATIC DESIGN) % % Originallu used to create safety clutchs in ez mot robot motor axis % (Status of: 2022-04-12) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignSupplement2connect2SG, SGdesignSupplement % % SGB=SGdesignSupplementPlugin(SGA,[wt,sl,ez,CPL,fill]) % === INPUT PARAMETERS === % SGA: Solid Geometry % wt: [wall thickness height modification]; default is [1.5 0] % sl: slot size; default is 'c' fit or a number % ez: default is [0 0 1]; not used % CPL: CPL out contour; default is same as contour of SGA % fill: if true; SGB is a block; default is false; % === OUTPUT RESULTS ====== % SGB: Supplement solid to plug in SGA % % EXAMPLE: % SGDIN985(4); B=ans; % Create a solid % SGdesignSupplementPlugin(B,2,'t'); % Plugin with fitting 't' % SGdesignSupplementPlugin(B,0,'t'); % Full solid with fitting 't' % SGdesignSupplementPlugin(B,[0 1],'t'); % Full solid with fitting 't' just 1 mm height % SGdesignSupplementPlugin(B,[0 -1],'t'); % Full solid with fitting 't' shorten height by 1 mm % % See also: SGdesignSupplement2connect2SG, SGdesignSupplement % % % Copyright 2022 Tim C. Lueth |
SGdesignSupplement2connect2SG(SGA,SGB,de)- first appraoch to create bridges between two solids |
 | % SGdesignSupplement2connect2SG(SGA,SGB,de) - first appraoch to create bridges between two solids % (by Tim Lueth, VLFL-Lib, 2022-APR-11 as class: AUTOMATIC DESIGN) % % Important fnctn to assemble independenty design component groups % SGdesignSupplement4screws (SGdesignSupplement) (Status of: 2022-04-12) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignSupplement % % [SGA,SGB,SGC]=SGdesignSupplement2connect2SG(SGA,SGB,[de]) % === INPUT PARAMETERS === % SGA: Solid A % SGB: Solid B % de: connector width; default is automatic mode '' % === OUTPUT RESULTS ====== % SGA: Solid A with optional Bridging solid % SGB: Solid B with optional Bridging solid % SGC: Connecting solid % % EXAMPLE: % A=SGbox; B=SGtransP(A,[40 0 5]); SGfigure(-30,30); SGplotalpha(A,'r'); SGplotalpha(B,'g') % SGdesignSupplement2connect2SG(A,B,5) % % SGofCPLz(CPLsubtract(PLsquare([60,40]),PLsquare([50 ,40]),'aligntop',-5),10); A=ans; % Solid A % SGtransP(SGDIN985(4),[15 10 0]); B=ans; % Solid B % SGfigure(-30,30); SGTplotalpha(A,'r'); SGTplotalpha(B,'g'); % Show relation % SGdesignSupplement2connect2SG(A,B,5) % % % See also: SGdesignSupplement % % % Copyright 2022 Tim C. Lueth |
tplotaxis(TL,c,a,dl)- plots the elongation of the z-axhis of a frame or a frame list |
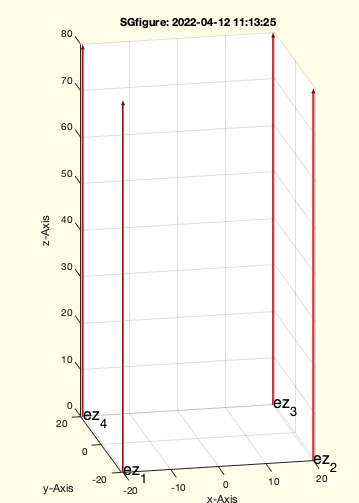 | % tplotaxis(TL,c,a,dl) - plots the elongation of the z-axhis of a frame or a frame list % (by Tim Lueth, VLFL-Lib, 2022-APR-11 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: tplot % % h=tplotaxis(TL,[c,a,dl]) % === INPUT PARAMETERS === % TL: Frame list % c: color % a: alpha value % dl: radius and z starting at T % === OUTPUT RESULTS ====== % h: handle to graphics % % EXAMPLE: % PL=PLsquare(40), TL=TcopyVLez(PL) % cla; tplotaxis(TL) % % See also: tplot % % % Copyright 2022 Tim C. Lueth |
TLL2TL(TLL)- Converts a long list of frames into an array of frames |
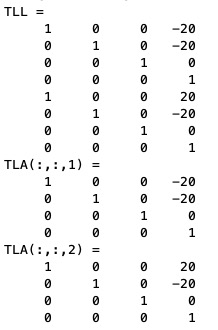 | % TLL2TL(TLL) - Converts a long list of frames into an array of frames % (by Tim Lueth, VLFL-Lib, 2022-APR-11 as class: AUXILIARY PROCEDURES) % % The long list format should be avoided! % In the SG-Lib frames are 4x4 homogenous transformation matrices. % Nevertheless by development-over-time reasons, there are 3 different % concepts for lists of frames % CELL FORMAT A cell list of [4x4] matrices {T1,T2,...} % ARRAY FORMAT An array of [4x4xn] matrices % LONG LIST FORMAT A long array list of [n*4 x 4] (SHOULD BE AVOIDED) % (Status of: 2022-04-11) % % Introduced first in SolidGeometry 5.2 % % See also: mat2celldim3, cell2matdim3, mat2cell, cell2array, cell2mat % % TLA=TLL2TL(TLL) % === INPUT PARAMETERS === % TLL: Long list format [n*4 x 4] % === OUTPUT RESULTS ====== % TLA: array format [4 x 4 x n] % % EXAMPLE: % PL=PLsquare(40), TcopyVLez(PL(1:2,:)); TL=ans; % TLC=mat2celldim3(TL) % % TLL=cell2mat(TLC) % AVOID !!!!!! BETTER USE cell2matdim3 % TLA=TLL2TL(TLL) % ONLY NECESSARY IF cell2mat was used instead of cell2matdim3 % % % % % % See also: mat2celldim3, cell2matdim3, mat2cell, cell2array, cell2mat % % % Copyright 2022 Tim C. Lueth |
cell2matdim3(TL)- converts a cell list of frames into an array format |
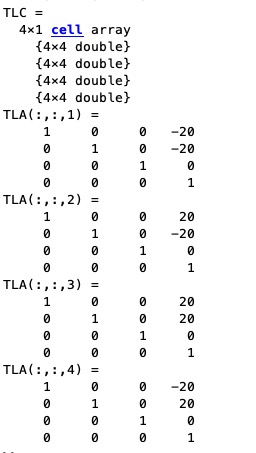 | % cell2matdim3(TL) - converts a cell list of frames into an array format % (by Tim Lueth, VLFL-Lib, 2022-APR-11 as class: AUXILIARY PROCEDURES) % % In the SG-Lib frames are 4x4 homogenous transformation matrices. % Nevertheless by development-over-time reasons, there are 3 different % concepts for lists of frames % CELL FORMAT A cell list of [4x4] matrices {T1,T2,...} % ARRAY FORMAT An array of [4x4xn] matrices % LONG LIST FORMAT A long array list of [n*4 x 4] (SHOULD BE AVOIDED) % (Status of: 2022-04-11) % % Introduced first in SolidGeometry 5.2 % % See also: mat2celldim3, mat2cell, cell2array, TLL2TL % % TLA=cell2matdim3(TL) % === INPUT PARAMETERS === % TL: Cell list of frames % === OUTPUT RESULTS ====== % TLA: Array format of Frames % % EXAMPLE: % PL=PLsquare(40), TcopyVLez(PL);TL=ans; % TLC=mat2celldim3(TL) % TLL=cell2mat(TLC) % TLA=cell2matdim3(TLC) % TLC=mat2celldim3(TLL) % TLA=cell2matdim3(TLC) % % See also: mat2celldim3, mat2cell, cell2array, TLL2TL % % % Copyright 2022 Tim C. Lueth |
getframeaxis(ax)- same as frameaxis but also stores the axis information |
 | % getframeaxis(ax) - same as frameaxis but also stores the axis information % (by Tim Lueth, VLFL-Lib, 2022-APR-10 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: getframe, implot % % I=getframeaxis([ax]) % === INPUT PARAMETERS === % ax: default is gca % === OUTPUT RESULTS ====== % I: Image struct as of getframe % % EXAMPLE: % SGbox; view(0,90); I=getframeaxis(gca); figure(123); implot(I); axis equal; % % See also: getframe, implot % % % Copyright 2022 Tim C. Lueth |
sprintfilehyperlink(fname)- creates a string containing two hyperlinks to open an file |
 | % sprintfilehyperlink(fname) - creates a string containing two hyperlinks to open an file % (by Tim Lueth, VLFL-Lib, 2022-APR-10 as class: AUXILIARY PROCEDURES) % % Used in SGwriteSTL (Status of: 2022-04-10) % % Introduced first in SolidGeometry 5.2 % % See also: openbydoubleclick, strhyperlink % % str=sprintfilehyperlink(fname) % === INPUT PARAMETERS === % fname: full file name % === OUTPUT RESULTS ====== % str: hyperlinkstring % % EXAMPLE: % fname=SGwriteSTL(SGbox,'test'), sprintfilehyperlink(fname) % % See also: openbydoubleclick, strhyperlink % % % Copyright 2022 Tim C. Lueth |
SGTsetTL(SG,FN,TL,nn)- adds a set of frames to a solid |
 | % SGTsetTL(SG,FN,TL,nn) - adds a set of frames to a solid % (by Tim Lueth, VLFL-Lib, 2022-APR-10 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 5.2 % % See also: SGTset % % SG=SGTsetTL(SG,[FN,TL,nn]) % === INPUT PARAMETERS === % SG: Solid geometry % FN: Leadning Frame letter or string % TL: array [4 x 4 x n] of Frames % nn: maximum number to support ith leading zeros; default is size(TL,3) % === OUTPUT RESULTS ====== % SG: Solid Geometry with additonal Frames from the Frame list % % EXAMPLE: % PLsquare(10); PL=ans, TcopyVLez(VLaddz(PL,5)); TL=ans % % SGTsetTL(SGTremove(SGbox,'all'),'F',TL) % Minimal frame name length for 4 F % SGTsetTL(SGTremove(SGbox,'all'),'F',TL,30) % up to 30 frames for 30 F % % See also: SGTset % % % Copyright 2022 Tim C. Lueth |
mat2celldim3(TL)- converts an [a:b:n] array into a cell list {n x [a b]} |
 | % mat2celldim3(TL) - converts an [a:b:n] array into a cell list {n x [a b]} % (by Tim Lueth, VLFL-Lib, 2022-APR-10 as class: AUXILIARY PROCEDURES) % % matlabs version supports only dim2 % In the SG-Lib frames are 4x4 homogenous transformation matrices. % Nevertheless by development-over-time reasons, there are 3 different % concepts for lists of frames % CELL FORMAT A cell list of [4x4] matrices {T1,T2,...} % ARRAY FORMAT An array of [4x4xn] matrices % LONG LIST FORMAT A long array list of [n*4 x 4] (should be avoided) % (Status of: 2022-04-11) % % Introduced first in SolidGeometry 5.2 % % See also: mat2cell, cell2array, cell2matdim3, TLL2TL % % NL=mat2celldim3(TL) % === INPUT PARAMETERS === % TL: [4 x 4 x n] array of n 4x4 frames % === OUTPUT RESULTS ====== % NL: cell list of [4x4 frames % % EXAMPLE: % TcopyVLez(PL,'','',[pi/20 pi/30 pi/10]); TL=ans; SGcopyTL(SGbox(2),TL); % TL % mat2celldim3(TL) % % % PL=PLsquare(40), TcopyVLez(PL);TL=ans; % TLC=mat2celldim3(TL) % TLL=cell2mat(TLC) % TLA=cell2matdim3(TLC) % TLC=mat2celldim3(TLL) % TLA=cell2matdim3(TLC) % % See also: mat2cell, cell2array, cell2matdim3, TLL2TL % % % Copyright 2022 Tim C. Lueth |
TcopyVLez(VL,ez,wa,po,wo,TT)- creates frames at specific positions in space |
 | % TcopyVLez(VL,ez,wa,po,wo,TT) - creates frames at specific positions in space % (by Tim Lueth, VLFL-Lib, 2022-APR-10 as class: KINEMATICS AND FRAMES) % % usefull for supplement and subtraction solids such as created by % SGdesignDIN912DIN985 % This fnctn is different to TLofCVL or TLofPL! % po could be: doff=[exp(1)/500 exp(1)/500 exp(1)/500]; % (Status of: 2022-04-17) % % Introduced first in SolidGeometry 5.2 % % See also: SGcopyVL, SGcopyTL, TLofCVL, TLofPL % % TL=TcopyVLez([VL,ez,wa,po,wo,TT]) % === INPUT PARAMETERS === % VL: Point list or vertex list % ez: ez vector default is [0 0 1] % wa: rotation around ez % po: position offset that is added to each translation vector * (i-1); % default is [0 0 0] % wo: angle offset that is added to each translation vector * (i-1); % default is 0 or [0 0 0] % TT: Frame to transfer all resulting frames with; default is '' % === OUTPUT RESULTS ====== % TL: List of Frames % % EXAMPLE: % PL=PLsquare(10) % TcopyVLez(PL) % Just points % TcopyVLez(PL,[0 0 1],pi/3) % All frames rotated % TcopyVLez(PL,[1 1 1]) % changed Orientation % TcopyVLez(PL,'','',[0 0 1]) % Increasing offset in z by 1 % TcopyVLez(PL,'','','',pi/10) % Increasing offset angle rot ez % TcopyVLez(PL,'','','',[pi/20 pi/30 pi/10]) % Increasing offset angle rot xyz % % TcopyVLez(PL,'','','',[pi/20 pi/30 pi/10]); TL=ans; SGcopyTL(SGbox(2),TL); % % TcopyVLez(PL,'','','','',TofPez([0 0 10],[0 -1 0])) % % % See also: SGcopyVL, SGcopyTL, TLofCVL, TLofPL % % % Copyright 2022 Tim C. Lueth |
num2strCNT(i,n,txt)- creates numberstring including addition zeros |
 | % num2strCNT(i,n,txt) - creates numberstring including addition zeros % (by Tim Lueth, VLFL-Lib, 2022-APR-10 as class: AUXILIARY PROCEDURES) % % used for automatic frame name creation (Status of: 2022-04-10) % % Introduced first in SolidGeometry 5.2 % % See also: num2strUP, num2str % % num2strCNT(i,[n,txt]) % === INPUT PARAMETERS === % i: index % n: maximal number of indices % txt: optional leading string % % EXAMPLE: % num2strCNT(2,12); % if counter runs from 1 to 12 % num2strCNT(2,12,'F'); % if counter runs from 1 to 12 with leading 'F" % num2strCNT(1,4999); % if counter runs to 4999 % % See also: num2strUP, num2str % % % Copyright 2022 Tim C. Lueth |
CPLofSGcutTBB(SG,zz)- returns a CPL based on the Bounding Box of a solid |
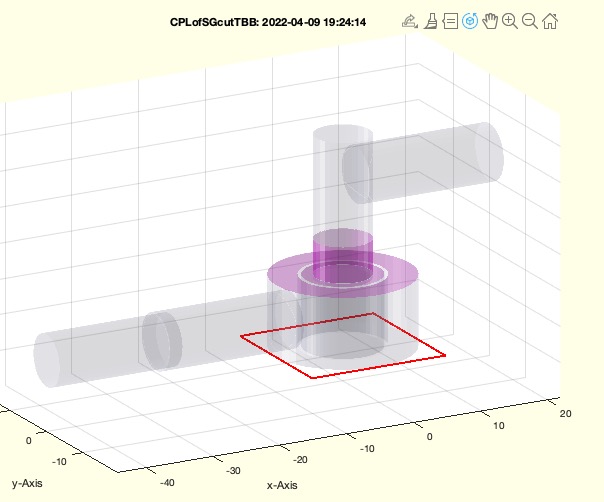 | % CPLofSGcutTBB(SG,zz) - returns a CPL based on the Bounding Box of a solid % (by Tim Lueth, VLFL-Lib, 2022-APR-09 as class: CLOSED POLYGON LISTS) % % Used in SGdesignMotorN40 % Helpful to design covers for Solids (Status of: 2022-04-09) % % Introduced first in SolidGeometry 5.2 % % See also: CPLofSGcutT, CPLofSGslice % % CPL=CPLofSGcutTBB([SG,zz]) % === INPUT PARAMETERS === % SG: Solid Geometry % zz: [zmin zmax]; default is [-inf +inf]); % === OUTPUT RESULTS ====== % CPL: CPLofBB of the considered Solid shape between zmin and zmax % % EXAMPLE: % CPLofSGcutTBB(SGsample(17),[0 15]) % CPLofSGcutTBB(SGsample(17),[10 15]) % CPLofSGcutTBB(SGsample(17),[15 inf]) % % % See also: CPLofSGcutT, CPLofSGslice % % % Copyright 2022 Tim C. Lueth |
SGmotorspindleclutch(DM,SP,M,slt)- creates a motor spindle clutch between a motor shaft and a steep spindle |
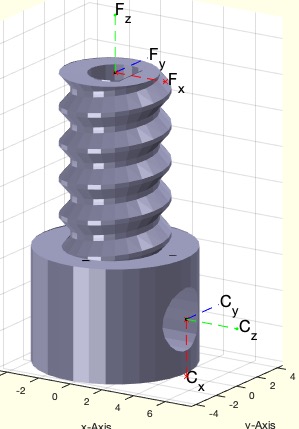 | % SGmotorspindleclutch(DM,SP,M,slt) - creates a motor spindle clutch between a motor shaft and a steep spindle % (by Tim Lueth, VLFL-Lib, 2022-APR-09 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGsteepspindle, CPLmotorshaft % % [SGA,SGB,SGN,AParts]=SGmotorspindleclutch([DM,SP,M,slt]) % === INPUT PARAMETERS === % DM: [Shaft-Diameter Shaft-Flattening, Coupling-Diameter % Coupling-Height]; default is [3 2.5 9 10] % SP: Spindle Diameter x Spindle Length and Specified Pitch]; default is % [6 10 NaN]; NaN means default % M: [Bushing-Diameter x Screw-Length; default is [2 4] % slt: fitting; default is 'c' % === OUTPUT RESULTS ====== % SGA: Spindle clutch % SGB: spindle % SGN: Lock nut % AParts: cell list parts list % % EXAMPLE: % SGmotorspindle([3 2.5 9 10],[6 10 NaN],[2 6]) % % See also: SGsteepspindle, CPLmotorshaft % % % Copyright 2022 Tim C. Lueth |
SGofCPLztwist(CPL,z,w)- Creates twisted solids from a CPL and a turning angle |
 | % SGofCPLztwist(CPL,z,w) - Creates twisted solids from a CPL and a turning angle % (by Tim Lueth, VLFL-Lib, 2022-APR-07 as class: SURFACES) % % In contrast to SGofCPLtransT, this fnctn allows several turns. % Works differnt to SGsteepspindle (Status of: 2022-04-07) % % Introduced first in SolidGeometry 5.2 % % See also: SGofCPLz, SGofCPLtransT, SGsteepspindle, exp_2022_04_07_rails % % SG=SGofCPLztwist([CPL,z,w]) % === INPUT PARAMETERS === % CPL: CPL (centered at origin) % z: height or [zmin zmax] % w: turning angle % === OUTPUT RESULTS ====== % SG: solid geometry % % EXAMPLE: % SGofCPLztwist(PLrope([2 0.3],[1 .5],true),10) % SGofCPLztwist(PLrope([2 0.3],[1 .5],false),10) % SGofCPLztwist(PLrope([4 1],[1 .5],true),5) % SGofCPLztwist(PLrope([4 1],[1 .5],false),5) % % See also: SGofCPLz, SGofCPLtransT, SGsteepspindle, exp_2022_04_07_rails % % % Copyright 2022 Tim C. Lueth |
sprintfvecUP(vec,unit,dig,cut0,sep,unitall)- string format for engineering applications |
 | % sprintfvecUP(vec,unit,dig,cut0,sep,unitall) - string format for engineering applications % (by Tim Lueth, VLFL-Lib, 2022-APR-07 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.2 % % See also: num2strUP, sprintfvec % % si=sprintfvecUP(vec,[unit,dig,cut0,sep,unitall]) % === INPUT PARAMETERS === % vec: vector with doubles % unit: unit string such as 'mm' % dig: number of digits; default is 2 % cut0: if true (default); ending zeros are cut % sep: separator between numbers; default is '/' % unitall: if true (false); all numbers get only a unit if they differ % === OUTPUT RESULTS ====== % si: string of units % % EXAMPLE: % num=[1 2 2.3]/pi/pi/pi % sprintfvecUP(num,'m',2,true,'/',true) % meter, cut zeros, all get units % sprintfvecUP(num,'m',2,true,' x ',false) % only once a unit % num=[1 2 2.3/100]/pi/pi/pi % sprintfvecUP(num,'m',2,true,' x ',false) % all units if units differ % % See also: num2strUP, sprintfvec % % % Copyright 2022 Tim C. Lueth |
SGcatheterroller(CLR,CLL,HLL,PLL)- Creates for a cather lock a gear drive |
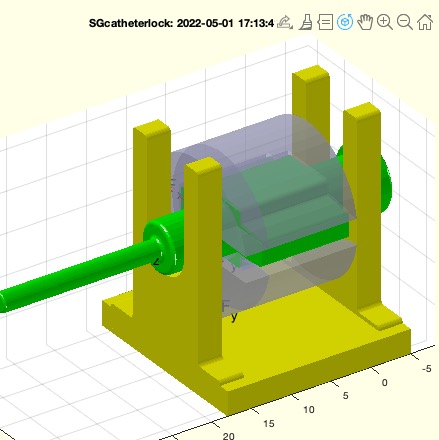 | % SGcatheterroller(CLR,CLL,HLL,PLL) - Creates for a cather lock a gear drive % (by Tim Lueth, VLFL-Lib, 2022-APR-06 as class: AUTOMATIC DESIGN) % % SGP=SGTsetorigin(SGP,'B'); % SGC=SGtransrelSG(SGC,SGP,'alignT',{'B','F'}); % SGG=SGtransrelSG(SGG,SGC,'matchT',{'F','F'}); (Status of: 2022-05-06) % % Introduced first in SolidGeometry 5.2 % % See also: SGcatheterroller, SGcatheterfeeder, SGcatheter % % [SGG,SGC,SGP,AParts]=SGcatheterroller([CLR,CLL,HLL,PLL]) % === INPUT PARAMETERS === % CLR: Diameter of segements; last value is diameter; default is [8 6 % 2.33] (8 French) % CLL: Length of segments; default is [2 25 20]); % HLL: Length and displacement of handle; default is [11 8] % PLL: [Diameter width wall space]; default is [20 12 3 5] % === OUTPUT RESULTS ====== % SGG: Gear cylinder for cather lock ('white') % SGC: SG of catheter ('green') % SGP: Podest for cather lock ('yellow') % AParts: Parts list % % EXAMPLE: % SGcatheterroller([8 6 .23]) % % See also: SGcatheterroller, SGcatheterfeeder, SGcatheter % % % Copyright 2022 Tim C. Lueth |
PLrope(D,v2,fuse)- creates cross section of twisted (laid) ropes |
 | % PLrope(D,v2,fuse) - creates cross section of twisted (laid) ropes % (by Tim Lueth, VLFL-Lib, 2022-APR-06 as class: CLOSED POLYGON LISTS) % % This fnctn must be changed since Bravaislattice is the wrong approach % to create rope pattern % The results created for SGofCPLztwist does no work for threadbars since % the shape is not symmetric! (Status of: 2022-04-07) % % Introduced first in SolidGeometry 5.2 % % See also: Bravaislattice, CPLcopypatternPL, CPLfillgap, SGofCPLztwist % % % CPL2=PLrope([D,v2,fuse]) % === INPUT PARAMETERS === % D: [Outer Diameter inner Diameter] % v2: second vector such as [1 0] % fuse: if true, there are no single cardeel anymore; default is false % === OUTPUT RESULTS ====== % CPL2: Final Contour % % EXAMPLE: % PLrope(5,[.9 .5]) % PLrope(3,[.9 .5]) % PLrope(7,[.9 .5]) % PLrope(7,[1 .5]) % PLrope(7,[1 .5],true) % % See also: Bravaislattice, CPLcopypatternPL, CPLfillgap, SGofCPLztwist % % % % Copyright 2022 Tim C. Lueth |
SGsteepspindle(MA,p,CPL,sl,BL,isleft)- returns the geometry of a steep spindle and a nut |
 | % SGsteepspindle(MA,p,CPL,sl,BL,isleft) - returns the geometry of a steep spindle and a nut % (by Tim Lueth, VLFL-Lib, 2022-APR-05 as class: PARAMETRIC DESIGN) % % In contrast to standard threads which have an pitch angle less than 45 % degree and therefor cannot be printed in 3D-FDM without support % structures, steep spindle threads with a pitch angle larger than 45 can % be printed in an upright position. Both Screws and Nuts. % On 2022-04-05 I was able to print several M6 by 160mm upright spindles % on an Anycubic Predator (Status of: 2022-06-07) % % Introduced first in SolidGeometry 5.2 % % See also: SGDIN13, SGDIN985 % % [A,B,C,E,F,AParts]=SGsteepspindle([MA,p,CPL,sl,BL,isleft]) % === INPUT PARAMETERS === % MA: [DM-Diameter | Screw-Length | Nut-Height | Hole-Diameter] all in mm % (checked bei DIN13/985) % p: pitch by winding. Per default it is the DIN13 value multplied with 2 % CPL: A contour to create a nut; per default the standard DIN985 shape % and height is used % sl: fitting between screw and nut; default is 'c' for clearance % BL: [Diameter Length Top Length-Bottom] of bearing; default is [0 M M] % isleft: if true a left thread is used % === OUTPUT RESULTS ====== % A: Solid Geometry of Spindle % B: Solid Geometry of Nut % C: Solid Geometry of open Nut % E: Solid Geometry of Spindle and Nut with conical transition % F: Plugable spindle % AParts: Parts list % % Additional Hyperlinks: % Trapezoidal thread % % EXAMPLE: % SGsteepspindle([6 30]) % M6 spindle length is 30 % SGsteepspindle([6 30 10]) % M6 spindle length is 30, Nut height is 10 % SGsteepspindle([6 30 10],5) % Pitch is 5 wich will lead to (30-6)/5 ~ 4 windinds % SGsteepspindle([6 16 0 2],'',[0 8]); % hole for steel bar, 8 edge nut % SGsteepspindle([6 16 0 2],'',[0 8],'',[5 10]); % 5mm diameter, bearing % SGsteepspindle([6 16 0 1.5],'',[0 8],'t',[4 5]); A=ans; % % See also: SGDIN13, SGDIN985 % % % Copyright 2022 Tim C. Lueth |
SGslidingcarriage(bbb,xa,w,slt,B,H)- returns a slider for 2 rails |
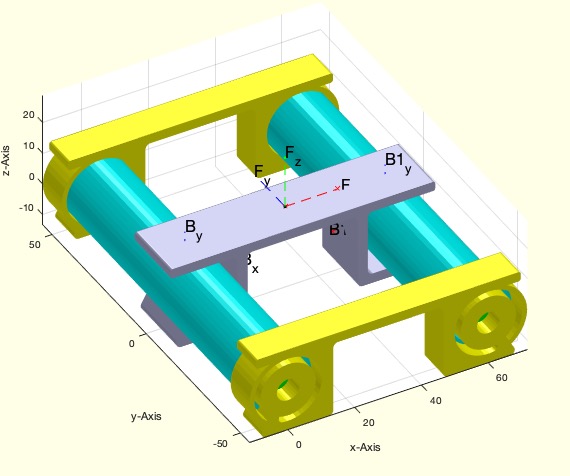 | % SGslidingcarriage(bbb,xa,w,slt,B,H) - returns a slider for 2 rails % (by Tim Lueth, VLFL-Lib, 2022-APR-03 as class: PARAMETRIC DESIGN) % % SGgearrackDIN(1,50.01,'',5,false,true) (Status of: 2022-04-13) % % Introduced first in SolidGeometry 5.2 % % See also: SGgearrackDIN % % [SG,SGE,SGC]=SGslidingcarriage([bbb,xa,w,slt,B,H]) % === INPUT PARAMETERS === % bbb: [Ri Ro W] Inner radius, outer Radius width of bearing % xa: Distance of bars; and width of carrier; default is [60 max] % w: [wb wc] width of slider and thickness of carriage; default is [1.5 3] % slt: fitting char or slot size; default is 't' for slfit % B: thickness of rail cover; default is 0 (no cover) % H: Height of plattform aboce rails; default is min % === OUTPUT RESULTS ====== % SG: Solid geometry of carriage % SGE: Solid geometry of end block % SGC: Solid geometry of cover % % Additional Hyperlinks: % Ball Bearing, Bars % % EXAMPLE: % SGslidingcarriage([6 12 19],[60],[1.5 3],'t') % SGslidingcarriage([6 12 19],[60],[1.5 3],'t',3) % SGslidingcarriage([6 12 19],[60],[1.5 3],'t',3,30) % % See also: SGgearrackDIN % % % Copyright 2022 Tim C. Lueth |
TofCPLT(CPL,TF,nr,style)- creates a list of frames inside a CPL or a planar CVL |
 | % TofCPLT(CPL,TF,nr,style) - creates a list of frames inside a CPL or a planar CVL % (by Tim Lueth, VLFL-Lib, 2022-APR-02 as class: KINEMATICS AND FRAMES) % % Used in combination or as part of CPLofSGTez (Status of: 2022-04-02) % % Introduced first in SolidGeometry 5.2 % % See also: CPLofSGTez, ezofchar, TofPez % % TL=TofCPLT([CPL,TF,nr,style]) % === INPUT PARAMETERS === % CPL: CPL % TF: T matrix, or ez vector of ezofchar % nr: [number of points, radius, distance to cpl boundary % style: "contour", "grid", "xgrid" % === OUTPUT RESULTS ====== % TL: list of frames with same ez as TF % % EXAMPLE: % TofCPLT(CPLsample(12),'-y') % TofCPLT(PLcircle(10,8),'-y',[20 1 0],'contour'); % TofCPLT(PLcircle(10,8),'-y',[20 1 0],'grid'); % TofCPLT(PLcircle(10,8),'-y',[20 1 0],'xgrid'); % % TofCPLT(CPLsample(12),'-y',[6 1 0],'xgrid'); % TofCPLT(CPLsample(12),'-y',[6 1 0],'grid'); % TofCPLT(CPLsample(12),'-y',[6 1 0],'contour'); % % See also: CPLofSGTez, ezofchar, TofPez % % % Copyright 2022 Tim C. Lueth |
SGshutterbeltcover(cov,"stamp")- Creates covers for shutter belts as an example for design using SG-Lib |
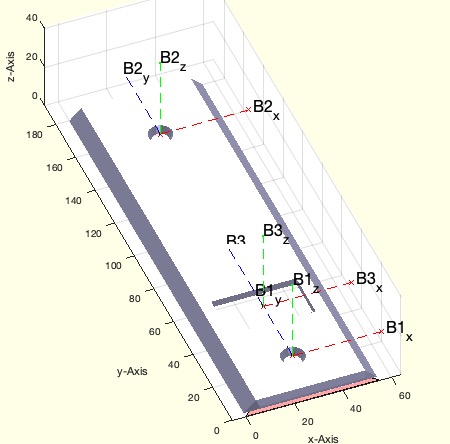 | % SGshutterbeltcover(cov,"stamp") - Creates covers for shutter belts as an example for design using SG-Lib % (by Tim Lueth, VLFL-Lib, 2022-APR-01 as class: PARAMETRIC DESIGN) % % From time to time there is a need to design simple things to test the % efficiency and limits of the SG-Lib for design tasks. (Status of: % 2022-04-02) % % Introduced first in SolidGeometry 5.2 % % SG=SGshutterbeltcover([cov,"stamp"]) % === INPUT PARAMETERS === % cov: [Length Width Height]; default is [182 55 5] % "stamp": option text string for backside % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGshutterbeltcover([199 55 5], 'stamp','Living Room'); % % % Copyright 2022 Tim C. Lueth |
CPLofPLseparatedlines(PL)- converts a list of 2D points paris into a CPLs that separates the each pair by nan nan |
 | % CPLofPLseparatedlines(PL) - converts a list of 2D points paris into a CPLs that separates the each pair by nan nan % (by Tim Lueth, VLFL-Lib, 2022-APR-01 as class: CLOSED POLYGON LISTS) % % Used in CPLofSGTez (Status of: 2022-04-01) % % Introduced first in SolidGeometry 5.2 % % See also: CPLofSGTez, CPLofPLcrossCPL, PLofCPLequidistant % % CPL=CPLofPLseparatedlines(PL) % === INPUT PARAMETERS === % PL: List of point [nx2] n is an even integer % === OUTPUT RESULTS ====== % CPL: Pairs separated by nan nan % % EXAMPLE: % CPLofPLseparatedlines([0 0; 10 0; 20 20 ; 20 40]) % % See also: CPLofSGTez, CPLofPLcrossCPL, PLofCPLequidistant % % % Copyright 2022 Tim C. Lueth |
CVLplotsurface(CVL,c,a,e,planar)- plots a planar CVL as surface |
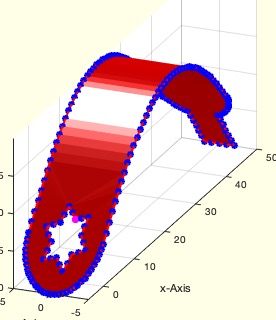 | % CVLplotsurface(CVL,c,a,e,planar) - plots a planar CVL as surface % (by Tim Lueth, VLFL-Lib, 2022-APR-01 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: CVLplot, CVLplots % % h=CVLplotsurface(CVL,[c,a,e,planar]) % === INPUT PARAMETERS === % CVL: CVL % c: color % a: transparenct % e: edge color % planar: true for planar CVL's; default is true % === OUTPUT RESULTS ====== % h: handle to graphics % % EXAMPLE: % CVLplotsurface(CVLsample(32)) % SGfigure(-30,30); CVLplotsurface(CVLsample(17),'','','',true); % error for 3D contour % SGfigure(-30,30); CVLplotsurface(CVLsample(17),'','','',false); % correct for 3D contour % % See also: CVLplot, CVLplots % % % Copyright 2022 Tim C. Lueth |
CPLofSGTez(SG,T,nr,"style")- returns the CPL and the frames plus a frame list using TofCPLT |
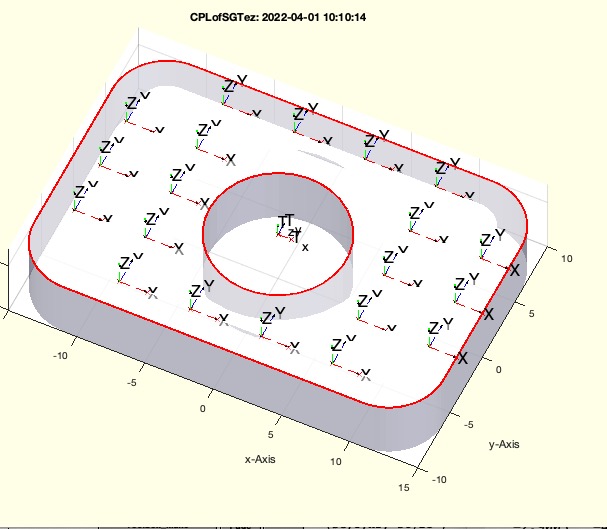 | % CPLofSGTez(SG,T,nr,"style") - returns the CPL and the frames plus a frame list using TofCPLT % (by Tim Lueth, VLFL-Lib, 2022-APR-01 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: PLofCPLequidistant, GPLauxgridpointsCPS2, TofCPLT % % [CPLorg,TF,TL,ACVL]=CPLofSGTez(SG,[T,nr,"style"]) % === INPUT PARAMETERS === % SG: Solid Geomtry % T: Frame of Surface or ez vector % nr: [number-of-points, radius, border]; default is [0 1 0] % "style": 'contour', 'grid', 'xgrid'; default is 'contour' % === OUTPUT RESULTS ====== % CPLorg: Contour of surface % TF: Frame to create CVL from CPL % TL: List of Frames % ACVL: cell list of CVLi;that defined the contours % % EXAMPLE: % CPLofSGTez(SGsample(25),[0 0 1],[6 1]); % CPLofSGTez(SGsample(40),[0 0 1]); % CPLofSGTez(SGsample(41),[0 0 1]); % CPLofSGTez(SGsample(27),[0 0 1]); % CPLofSGTez(SGsample(27),[0 0 1],[20 2],'style','contour'); % CPLofSGTez(SGsample(27),[0 0 1],[20 2],'style','grid'); % CPLofSGTez(SGsample(27),[0 0 1],[6 1 1],'style','xgrid'); % % See also: PLofCPLequidistant, GPLauxgridpointsCPS2, TofCPLT % % % Copyright 2022 Tim C. Lueth |
zoomsubplot- opens a figure and zooms the subplot image |
 | % zoomsubplot - opens a figure and zooms the subplot image % (by Tim Lueth, VLFL-Lib, 2022-MÄR-31 as class: VISUALIZATION) % % Introduced first in SolidGeometry 5.2 % % See also: copyfig % % zoomsubplot % % EXAMPLE: % SGsample(3:12); % Click into one subplot % zoomsubplot % % See also: copyfig % % % Copyright 2022 Tim C. Lueth |
SGshearing(SG,PL,dd)- shearing or bending of a Solid Geometry |
 | % SGshearing(SG,PL,dd) - shearing or bending of a Solid Geometry % (by Tim Lueth, VLFL-Lib, 2022-MÄR-31 as class: SURFACES) % % Introduced first in SolidGeometry 5.2 % % See also: linearinterp, SGbending, SGbendedCPL % % SGN=SGshearing(SG,[PL,dd]) % === INPUT PARAMETERS === % SG: Solid Geometry % PL: point list; if scalar the value describes the delta % dd: direction such as 'xz' or 'yz' % === OUTPUT RESULTS ====== % SGN: Sheared SG % % EXAMPLE: % SGshearing(SGbox,10,'xz'); % SGshearing(SGbox,10,'yz'); % SGshearing( SGtetramesh(SGbox),PLcircle(20,'',pi),'xz'); % bending in x % SGshearing( SGtetramesh(SGbox),PLcircle(20,'',pi),'yz'); SG=ans; % bending in y % SGremsurfedgepoints(SG) % % See also: linearinterp, SGbending, SGbendedCPL % % % Copyright 2022 Tim C. Lueth |
SGcatheterfeeder(ss,typ,fix)- creates rollers to move wires and catheters |
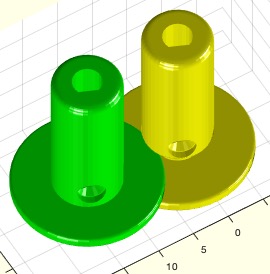 | % SGcatheterfeeder(ss,typ,fix) - creates rollers to move wires and catheters % (by Tim Lueth, VLFL-Lib, 2022-MÄR-31 as class: PARAMETRIC DESIGN) % % For the fixation, there is a need for a thread and a screw and a % silicon tube % Silkon tubes 9mm/11mm (Status of: 2022-05-06) % % Introduced first in SolidGeometry 5.2 % % See also: exp_2022_03_27_N20shiftplug, SGmotorN20, SGcatheterroller % % [SGA,SGB]=SGcatheterfeeder([ss,typ,fix]) % === INPUT PARAMETERS === % ss: [r1-motorshaft r2-motorshaft r3 roller w-silicon]; default is [9 2 % 3 2.5 ]) % typ: "Single", "Double", % fix: Kerbkonus default is [2.0 6] % === OUTPUT RESULTS ====== % SGA: Roller A % SGB: Roller B % % Additional Hyperlinks: % Mechanical Engineering Department, Grub screw DIN 915 with allen, Bushing (Kerbkonus E) % % EXAMPLE: % SGcatheterfeeder([9 2 3 2.5]) % SGcatheterfeeder([9 2 3 2.5],'double') % SGcatheterfeeder([9 2 3 2.5],'',[2/0 6]) % % See also: exp_2022_03_27_N20shiftplug, SGmotorN20, SGcatheterroller % % % Copyright 2022 Tim C. Lueth |
ashft(i)- creates a irrational number between and 66 degree (1.155 rad) |
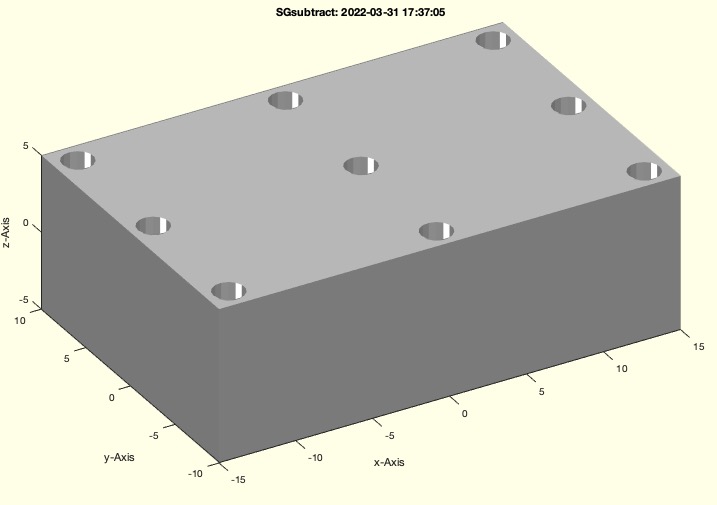 | % ashft(i) - creates a irrational number between and 66 degree (1.155 rad) % (by Tim Lueth, VLFL-Lib, 2022-MÄR-31 as class: AUTOMATIC DESIGN) % % This fnctn is used if in an repeated way boolean fnctns are used with % the same geometry % zz=2*pi/exp(1); % pp=primes(100); % a=zz/pp(end+1-i); % the fnctn creates an irrational number based on pi/exp(1)/pime numbers % to avoid any kind a repeated angles. The use of SGremsurfedgepoints is % still recommended. % (Status of: 2022-03-31) % % Introduced first in SolidGeometry 5.2 % % See also: SGsubtract, SGunion % % a=ashft(i) % === INPUT PARAMETERS === % i: number between 1 and 25 % === OUTPUT RESULTS ====== % a: angle to turn % % EXAMPLE: % A=SGbox([30 20 10]); B=SGcylinder(1,20); GPLauxgridpointsCPS2(CPLbuffer(PLsquare([30,20]),-1.5),10); PL=ans; CPSplot(PLsquare([30,20])) % %% FAILS % C=A; for i=1:size(PL,1); Bi=SGtransP(B,[PL(i,:) -10]); C=SGsubtract(C,Bi); end; cla; SGplotalpha(C); view(-30,30); % %% NO PROBLEMS % C=A; for i=1:size(PL,1); Bi=SGtransR(B,rot(0,0,ashft(i))); Bi=SGtransP(Bi,[PL(i,:) -10]); C=SGsubtract(C,Bi); end; cla; SGplotalpha(C); view(-30,30); % % % See also: SGsubtract, SGunion % % % Copyright 2022 Tim C. Lueth |
SGdesignPeginHole(CPL,h,sl)- design subtraction solid and supplement solid for peg in hole connections using fittings |
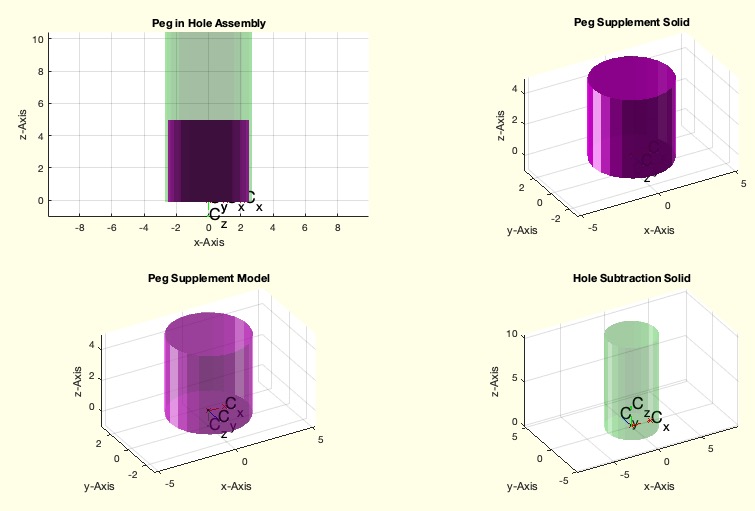 | % SGdesignPeginHole(CPL,h,sl) - design subtraction solid and supplement solid for peg in hole connections using fittings % (by Tim Lueth, VLFL-Lib, 2022-MÄR-31 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignDIN912BushingE, SGdesignPluginFrame % % [PA,HS]=SGdesignPeginHole([CPL,h,sl]) % === INPUT PARAMETERS === % CPL: Desired contour; % h: [lp lh]; length peg; length hole; hole per default peg plus % slfit('c') % sl: fitting; per default 'c' % === OUTPUT RESULTS ====== % PA: Supplement solid for peg using frame 'C' and 'alignT' % HS: Subtraction solid for hole using frame 'C' and 'alignT' % % EXAMPLE: % [PA,HS]=SGdesignPeginHole('',[5 10],'t'); % SGunion(SGbox,PA,'alignT',{'C','F'}), A=ans; % SGsubtract(SGbox,HS,'alignT',{'C','F'}), B=ans; % cla; SGplotalpha(A,'Y'); SGplotalpha(B,'','','',A,'alignT',{'F','F'}); VLFLplotlight(1,0.5); % % See also: SGdesignDIN912BushingE, SGdesignPluginFrame % % % Copyright 2022 Tim C. Lueth |
axisscale(ss)- scales the axis to a defined size |
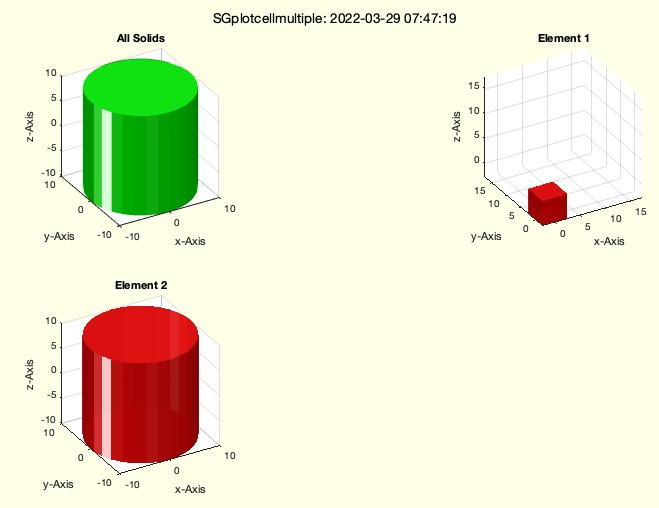 | % axisscale(ss) - scales the axis to a defined size % (by Tim Lueth, VLFL-Lib, 2022-MÄR-29 as class: VISUALIZATION) % % The more often solids consist of several parts and the more often the % functiion SGplotcellmultiple is used, the is alos a need to see the % indivudal parts in the same scale (Status of: 2022-03-29) % % Introduced first in SolidGeometry 5.2 % % See also: view4all, axisratio, axis4math, axis4animation, % SGplotcellmultiple % % axisscale(ss) % === INPUT PARAMETERS === % ss: [dx dy dz] % % EXAMPLE: % A=SGbox([5,5,5]); B=SGbox(20,30,10); SG={A,B}; SGplotcellmultiple(SG) % A=SGbox([5,5,5]); B=SGbox(20,30,10); SG={A,B}; SGplotcellmultiple(SG,'scale') % % See also: view4all, axisratio, axis4math, axis4animation, % SGplotcellmultiple % % % Copyright 2022 Tim C. Lueth |
SGofCPLextrudealongCPL(RL,CPL,adjst,r)- extrudes a contour ([x z]) along a 2D-contour [x y] |
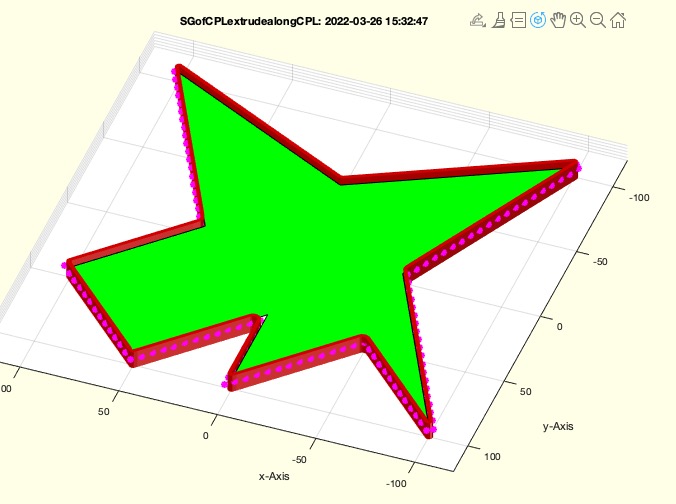 | % SGofCPLextrudealongCPL(RL,CPL,adjst,r) - extrudes a contour ([x z]) along a 2D-contour [x y] % (by Tim Lueth, VLFL-Lib, 2022-MÄR-26 as class: SURFACES) % % See also powerful fnctn SGofCPLtransT and TLofCVL % Not completely bug free because of TLofCVL (Status of: 2022-03-26) % % Introduced first in SolidGeometry 5.2 % % See also: SGofCPLtransT, TLofCVL, SGofCPLextrude % % SG=SGofCPLextrudealongCPL([RL,CPL,adjst,r]) % === INPUT PARAMETERS === % RL: Point list in x and z % CPL: Contour path for extrusion; considered as close % adjst: % r: % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGofCPLextrudealongCPL(PLsquare(2,10),CPLsample(3)*10); % SGofCPLextrudealongCPL(CPLsample(3),CPLsample(3)*10); % bug % SGofCPLextrudealongCPL(CPLsample(3),CPLsample(3)*20); % correct % % % See also: SGofCPLtransT, TLofCVL, SGofCPLextrude % % % Copyright 2022 Tim C. Lueth |
SGdesignPluginFrame(SG,T,H,sl,styl)- adds a plug-in sleeve to a solid |
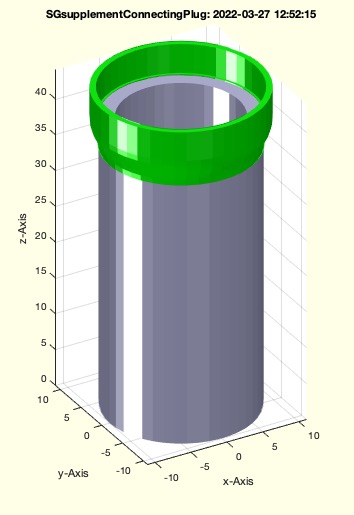 | % SGdesignPluginFrame(SG,T,H,sl,styl) - adds a plug-in sleeve to a solid % (by Tim Lueth, VLFL-Lib, 2022-MÄR-26 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGsupplement % % [SG,SGP]=SGdesignPluginFrame([SG,T,H,sl,styl]) % === INPUT PARAMETERS === % SG: Solid Geometry % T: HT Frame or ez vector (roughly) or Frame name % H: height of the sleeve % sl: fitting; default is 't' for transition % styl: straight or bezier1 or bezier2; default is bezier1 % === OUTPUT RESULTS ====== % SG: Solid plus plug-in sleeve % SGP: jsut the plug-in sleeve % % EXAMPLE: % SGdesignPluginFrame(SGbox ,[0 -1 0],[8 1.5],'','bezier1') % SGdesignPluginFrame(SGcylinder(10,'','',8) ,[0 0 1],[8 1],'','straight') % SGdesignPluginFrame(SGcylinder(10,'','',8) ,[0 0 1],[8 1],'','bezier1') % SGdesignPluginFrame(SGcylinder(10,'','',8) ,[0 0 1],[8 1],'','bezier2') % % See also: SGsupplement % % % Copyright 2022 Tim C. Lueth |
SGmotorN40(sh,sz,gb,PL)- returns the Geometry of a Chihai motor CHF-GM13-050S |
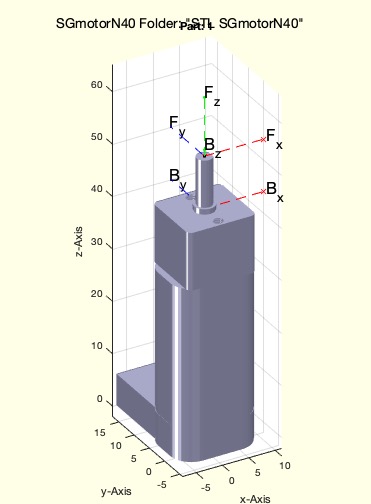 | % SGmotorN40(sh,sz,gb,PL) - returns the Geometry of a Chihai motor CHF-GM13-050S % (by Tim Lueth, VLFL-Lib, 2022-MÄR-23 as class: MODELING PROCEDURES) % % Helps to design motor driven mechanisms % To learn to write such fnctn better look into SGmotorN40_90 (Status of: % 2022-04-20) % % Introduced first in SolidGeometry 5.2 % % See also: SGbatteriepack, SGmotorSolExpert, SGcapontop, SGmotorshaft, % SGmotorhousing, SGmotorN40_90 % % SG=SGmotorN40([sh,sz,gb,PL]) % === INPUT PARAMETERS === % sh: Shaft Diameter and Shaft Flattening; default is [3 2.5] % sz: [maxsize-x maxsize-y length-shaft diameter shaft-socket, height % shaft-socket]; default is [15.4 12 9 4 1] % gb: [maxsize-x maxsize-y length-shaft diameter shaft-socket, height % shaft-socket]; default is [15.4 12 9 4 1] % PL: Point list of screws; default is [0 -4.5; 0 4.5] % === OUTPUT RESULTS ====== % SG: Solid Geometry of a N20 Motor by Sebastian Heininger Selection % % Additional Hyperlinks: % N20 Motor with Encoder, Chihai motor CHF-GM13-050S, N30 Motor with Encoder, % TT Motor long list % % EXAMPLE: % SGmotorN40 % % See also: SGbatteriepack, SGmotorSolExpert, SGcapontop, SGmotorshaft, % SGmotorhousing, SGmotorN40_90 % % % Copyright 2022 Tim C. Lueth |
SGdesignBoltedLid(SG,T,MM,w,H,"assembly","screws","bolt")- creates a cover lid and a fixation for an open 2.5 designed box |
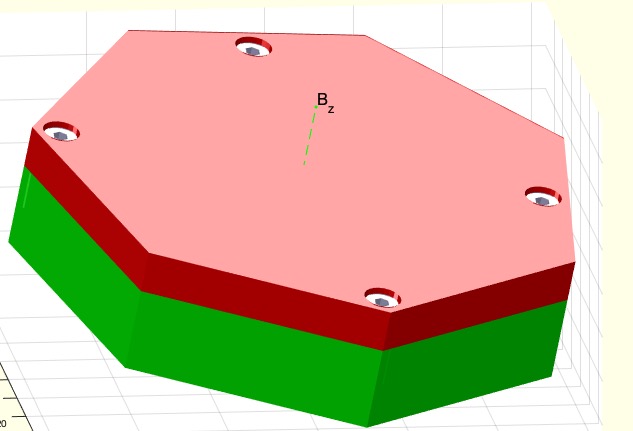 | % SGdesignBoltedLid(SG,T,MM,w,H,"assembly","screws","bolt") - creates a cover lid and a fixation for an open 2.5 designed box % (by Tim Lueth, VLFL-Lib, 2022-MÄR-22 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGboxbolted, SGofCPLzboxbolted % % [A,C,S,mt,Aparts]=SGdesignBoltedLid([SG,T,MM,w,H,"assembly","screws","b % olt"]) % === INPUT PARAMETERS === % SG: Solid Geometry without a cover lid % T: Frame Name, 4x4 matrix or ez-vector; default is [0 0 1] % MM: [diameter length] metrix of screw; default is [M2.0 6] % w: width of walls and height of cover % H: size of bolts % "assembly": DIN7991 or DIN912bush or DIN912985 % "screws": number of screws; default is 4 % "bolt": if used, there is a bolt below the screw fixation % === OUTPUT RESULTS ====== % A: New Solid with scrw fixation % C: Cover lid % S: screws used % mt: not used yet, for compatibilty with other SGdesignfnctn % Aparts: parts list % % EXAMPLE: % CPL=PLcircle(30,7); CPL=[CPL;nan nan;CPLbuffer(CPL,2)]; SGofCPLz(CPL,10); SG=ans; % SGtransrelSG(SG,'','rotx',pi/10,'roty',pi/20); SG=ans; % SGdesignBoltedLid(SG,[0 0 1]) % % See also: SGboxbolted, SGofCPLzboxbolted % % % Copyright 2022 Tim C. Lueth |
PLofCPLequidistant(CPL,nr,isc)- returns points on closed or open contours with equal distances |
 | % PLofCPLequidistant(CPL,nr,isc) - returns points on closed or open contours with equal distances % (by Tim Lueth, VLFL-Lib, 2022-MÄR-20 as class: CLOSED POLYGON LISTS) % % IN contrast to PLaddauxpoints, this fnctn does not return a fitting % contour but only a unsorted points list. % Be careful with holes that also generate points (Status of: 2022-03-20) % % Introduced first in SolidGeometry 5.2 % % See also: CPLlength, PLaddauxpoints % % PLN=PLofCPLequidistant(CPL,[nr,isc]) % === INPUT PARAMETERS === % CPL: SINGLE CLOSED CONTOUR % nr: bumber of points; default is 4; negative number means minimal % distance % isc: false= open CPL; true=closed CPL; default is true % === OUTPUT RESULTS ====== % PLN: POINT LIST on Contour with equal distances % % EXAMPLE: % PLofCPLequidistant(PLsquare(2,7),4) % PLofCPLequidistant(CPLsample(18),8) % PLofCPLequidistant(PLsquare(2,7),40,true) % Closed contour by default % PLofCPLequidistant(PLsquare(2,7),40,false) % Open contour % PLofCPLequidistant([-10 0;20 0],1,false) % 1 Point % PLofCPLequidistant([-10 0;20 0],2,false) % Two points % PLofCPLequidistant([-10 0;20 0],3,false) % 3 Points % PLofCPLequidistant([-10 0;20 0],-3,false) % Distance 3 % PLofCPLequidistant(CPLsample(29),4,true) % multi region CPLs - numbers % PLofCPLequidistant(CPLsample(29),-4,true) % multi region CPLs - distance % % See also: CPLlength, PLaddauxpoints % % % Copyright 2022 Tim C. Lueth |
SGboxbolted(CPL,H,w,MM,"assembly","radial","screws","bolt")- creates a box that is closed by a simple lid cover |
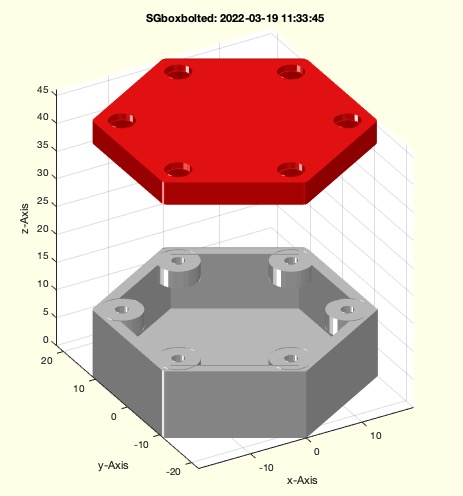 | % SGboxbolted(CPL,H,w,MM,"assembly","radial","screws","bolt") - creates a box that is closed by a simple lid cover % (by Tim Lueth, VLFL-Lib, 2022-MÄR-19 as class: AUTOMATIC DESIGN) % % future releases will add a sealing lip at the top % and opening for cabeling % Please be aware, that the screws sockets need space inside, and % therefor not the complete volume CPL x H is available (Status of: % 2022-06-23) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignBoltedLid % % [A,C,Aparts]=SGboxbolted([CPL,H,w,MM,"assembly","radial","screws","bolt % "]) % === INPUT PARAMETERS === % CPL: Inner Contour required for assembly % H: Inner height required for assembly % w: [wall cover floor screws]; default is [2 2 2 2]; % MM: [Diameer Length] default is 2.6 6 % "assembly": "DIN7991" or "DIN912985", or "DIN912bush" % "radial": radius for outside box radius; default is 1 % "screws": number of screws; default is 4 % "bolt": if used, there are bolts under the screw sockets % === OUTPUT RESULTS ====== % A: SG of the Box % C: SG of the Lid/Cover % Aparts: Parts list for Assembly % % EXAMPLE: % SGboxbolted(PLcircle(40),20,[2 4],[2.5 5.9],'screws',4,'bolt') % SGboxbolted(PLcircle(40,8),20,[2 4],[2.5 5.9],'screws',8,'bolt') % SGboxbolted(PLcircle(40,8),20,[2 4],[2.5 5.9],'screws',4,'bolt') % SGboxbolted(PLcircle(40,8),20,[2 4],[2.0 5.9],'screws',4,'bolt','assembly','DIN912bush') % SGboxbolted(CPLsample(18)*2,20,[2 4],[2.0 5.9],'screws',4,'assembly','DIN912985') % % % See also: SGdesignBoltedLid % % % Copyright 2022 Tim C. Lueth |
SGDIN13(D,L,p,CPL,shr,left)- returns a screw geometry related to DIN13 (same as SGscrewDIN) |
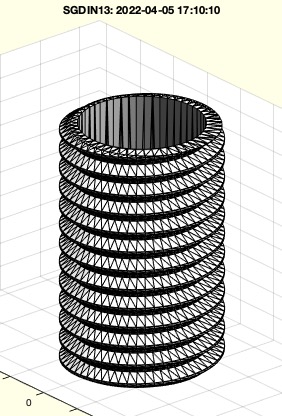 | % SGDIN13(D,L,p,CPL,shr,left) - returns a screw geometry related to DIN13 (same as SGscrewDIN) % (by Tim Lueth, VLFL-Lib, 2022-MÄR-19 as class: PARAMETRIC DESIGN) % % Written as "SGscrewDIN" for SG-Lib 4.4 and SGofCPLcommand % It is used to create wrt DIN13 watertight threads for % a) Screws (Positive Diameter, no outer CPL contour) % b) Screw tap (Negative Diameter, no outer CPL contour) % c) Nuts (Negative Diameter, outer Radius or CPL contour) % In SG 4.5 the Screw starts at z=0 (Michael Kruttschnitt) % In SG 4.7 bug using CPLs removed by comment from Simon Schiele % In SG 5.0, left-hand threads are also supported (Status of: 2022-03-24) % % Introduced first in SolidGeometry 5.2 % % See also: SGsteepspindle, SGDIN985, SGthread, SGscrewDIN(old), % PLthreadDIN % % SG=SGDIN13(D,L,[p,CPL,shr,left]) % === INPUT PARAMETERS === % D: Diameter (negative creates a screw cutter or nut) % L: Length % p: optional pitch % CPL: Outer Diameter or CPL, creates nuts when D<0 and Holes if D>0 % shr: shrinkage because of printer oversize; default is 0 % left: if true, a left winding is designed % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGDIN13( 32,50) % Screw % SGDIN13(+32,50,'',25) % Screw with tube to insert a carbon or metal bar % SGDIN13(-32,50) % Screw cutter % SGDIN13(-32,50,'',35) % circular nut % SGDIN13(-32,50,'',PLcircle(40,7)); nut hexagon shape % SGDIN13( 32,50,'','','',true) % Screw - Left orientation % % % See also: SGsteepspindle, SGDIN985, SGthread, SGscrewDIN(old), % PLthreadDIN % % % Copyright 2022 Tim C. Lueth |
SGclampCTtable(LL,M,clpar)- returns the solid geometry for a CT table clamp |
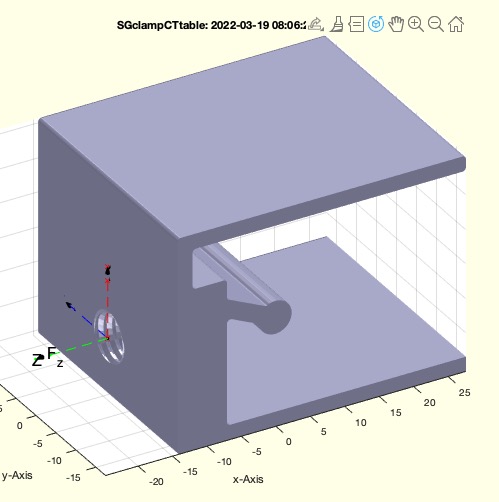 | % SGclampCTtable(LL,M,clpar) - returns the solid geometry for a CT tabel clamp % (by Tim Lueth, VLFL-Lib, 2022-MÄR-19 as class: PARAMETRIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: PLclampCTtable % % SG=SGclampCTtable([LL,M,clpar]) % === INPUT PARAMETERS === % LL: Width of clamp % M: Diameter of metric screw (positive core hole; negative nut); default % is 0 % clpar: same parameter as PLclampCTtable; default may be [40 3 0.5 3] % === OUTPUT RESULTS ====== % SG: Solid geometry including Frame at centered screw position % % EXAMPLE: % SGclampCTtable(35,+8); % SGclampCTtable(35,-8); % % See also: PLclampCTtable % % % Copyright 2022 Tim C. Lueth |
SGboxturnswitch()- Solid Geometry for 6V Batterie box plus 1 turn-switch to support simple DC-Motor control |
 | % SGboxturnswitch() - Solid Geometry for 6V Batterie box plus 1 turn-switch to support simple DC-Motor control % (by Tim Lueth, VLFL-Lib, 2022-MÄR-17 as class: AUTOMATIC DESIGN) % % Test with a project of Philipp Paprottka % Rotary switch: 4 x 3 for switching but 2 x 3 ==> (+/-) x % (forward/stop/backward) would be enough % 6 V Battery box is used: https://www.amazon.de/gp/product/B0761TSC32 % 4x3 Rotary switch used: https://www.amazon.de/gp/product/B07DQLNWQL % 2.5mm JST-SM 2 pole used: https://www.amazon.de/dp/B07QM13SRX % Wire 22 AWG: https://www.amazon.de/dp/B0792Y7RHP % or % https://www.amazon.de/dp/B06WGN56V2/ % == % Crimping tool 32WM-20AWG: https://www.amazon.de/gp/product/B002AVVO7K/ % Wire stripper 34-22AWG: https://www.amazon.de/dp/B001YHELPS % (Status of: 2022-03-24) % % Introduced first in SolidGeometry 5.2 % % See also: SGclampCTtable, SGdesignBoltedLid, % https://www.amazon.de/gp/product/B07DQLNWQL, % https://www.amazon.de/gp/product/B0761TSC32, % https://www.amazon.de/dp/B07QM13SRX, % https://www.amazon.de/dp/B0792Y7RHP, https://www.amazon.de/dp/B06WGN56V2 % % SGboxturnswitch([]) % % EXAMPLE: % SGboxturnswitch % % % See also: SGclampCTtable, SGdesignBoltedLid, % https://www.amazon.de/gp/product/B07DQLNWQL, % https://www.amazon.de/gp/product/B0761TSC32, % https://www.amazon.de/dp/B07QM13SRX, % https://www.amazon.de/dp/B0792Y7RHP, https://www.amazon.de/dp/B06WGN56V2 % % % Copyright 2022 Tim C. Lueth |
mm2French(mm)- converts Diameters in mm in French units |
 | % mm2French(mm) - converts Diameters in mm in French units % (by Tim Lueth, VLFL-Lib, 2022-MÄR-16 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.2 % % See also: French2mm % % cha=mm2French(mm) % === INPUT PARAMETERS === % mm: diameter (!) in mm % === OUTPUT RESULTS ====== % cha: diameter in french % % EXAMPLE: % mm=French2mm(7), mm2French(mm) % % % See also: French2mm % % % Copyright 2022 Tim C. Lueth |
SGdesignMotorN20(LM)- creates subtraction solids for the design of motor driven mechanisms |
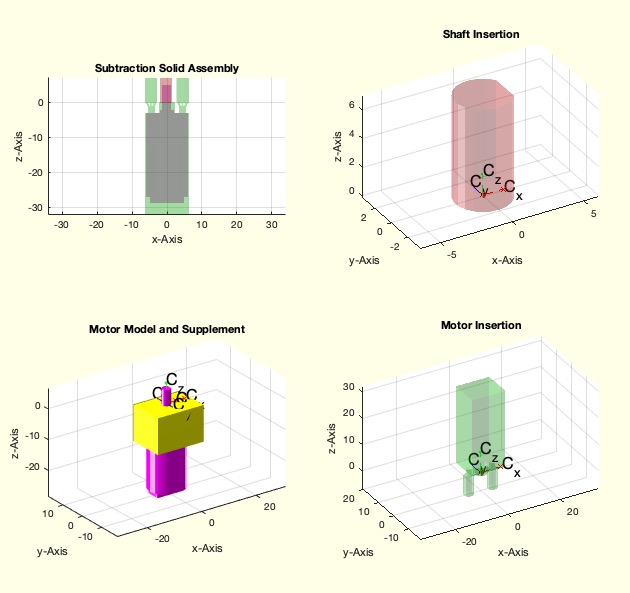 | % SGdesignMotorN20(LM) - creates subtraction solids for the design of motor driven mechanisms % (by Tim Lueth, VLFL-Lib, 2022-MÄR-15 as class: AUTOMATIC DESIGN) % % Introduced first in SolidGeometry 5.2 % % See also: SGdesignDIN912DIN985, SGdesignDIN912BushingE, % SGdesignDIN7991, SGdesignMotorN20 % % % [H,N,S,Supp,Parts]=SGdesignMotorN20([LM]) % === INPUT PARAMETERS === % LM: [LengthofMotor gearbox/Supplement wall]; default is [26 9 2.0] % === OUTPUT RESULTS ====== % H: Head / Shaft subtraction solid (Red) % N: Head / Mtor subtraction solid (Green) % S: Shape of Motor N20 (Magenta) % Supp: Supplement solid (Yellow) % Parts: required parts for assembly % % EXAMPLE: % [H,N,S,Supp,Parts]=SGdesignMotorN20 % A=SGbox;A=SGsubtract(A,H,'alignT',{'C','B'}); A=SGcolorfaces(A,'y'); SGwriteSTL(A,'BoxN20-A'); % B=SGbox; B=SGsubtract(B,N,'alignT',{'C','F'}); B=SGcolorfaces(B,'g'); SGwriteSTL(B,'BoxN20-B'); % SGfigure(-12,5); SGplotalpha(A); SGplotalpha(B,'','','',A,'alignT',{'F','B'}); VLFLplotlight(1,0.5); % SGplotalpha(S,'m','','',A,'alignT',{'C','B'}); % SGbox([50,50,2]);B=ans; B=SGunion(B,Supp,'alignT',{'C','F'}); cla; SGTplotalpha(B); % SGsubtract(B,N,'alignT',{'C','F'}); B=ans; SGwriteSTL(B,'PlateN20'); % SGcylinder(9/2,15);A=ans; A=SGTsetBFsimple(A); % SGsubtract(A,H,'alignT',{'C','F'}); A=ans; SGwriteSTL(A,'PinN20'); % SGbox([5,5,2]);B=ans; B=SGunion(B,Supp,'alignT',{'C','F'}); cla; SGTplotalpha(B); SGsubtract(B,N,'alignT',{'C','F'}); B=ans; SGwriteSTL(B,'MiniN20'); % % % See also: SGdesignDIN912DIN985, SGdesignDIN912BushingE, % SGdesignDIN7991, SGdesignMotorN20 % % % % Copyright 2022 Tim C. Lueth |
CPLremovebuffer(CPL,wall)- just removes thin walls from CPLS (same as CPLdullededges) |
 | % CPLremovebuffer(CPL,wall) - just removes thin walls from CPLS (same as CPLdullededges) % (by Tim Lueth, VLFL-Lib, 2022-MÄR-15 as class: CLOSED POLYGON LISTS) % % Used in automatic design fnctn to avoid thin walls that will break % after printing or in use % same as CPLN=CPLbuffer(CPLbuffer(CPL,-d),d); % (Status of: 2022-03-15) % % Introduced first in SolidGeometry 5.2 % % See also: CPLbuffer, CPLremovearea, CPLdullededges % % CPLN=CPLremovebuffer(CPL,[wall]) % === INPUT PARAMETERS === % CPL: CPL conotur % wall: minimal wall thickness % === OUTPUT RESULTS ====== % CPLN: New Contour without CPLwall % % EXAMPLE: % CPLremovebuffer(CPLsample(21),3) % CPLremovebuffer(CPLsample(21),4) % CPLdullededges(CPLsample(21),3/2) % CPLdullededges(CPLsample(21),4/2) % % See also: CPLbuffer, CPLremovearea, CPLdullededges % % % Copyright 2022 Tim C. Lueth |
PLclampCTtable(wal)- returns the CPL of a clamp for an hybrid-OR CT-table |
 | % PLclampCTtable(wal) - returns the CPL of a clamp for an hybrid-OR CT-table % (by Tim Lueth, VLFL-Lib, 2022-MÄR-12 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: PLjunkerhallpart % % [CPLC,CPLT]=PLclampCTtable([wal]) % === INPUT PARAMETERS === % wal: [width wallsize radius lowerwallsize]; default is [40 3 0.5 3] % === OUTPUT RESULTS ====== % CPLC: Contour of the clamp % CPLT: Contour of the table; not centered % % EXAMPLE: % CPL=PLclampCTtable; SG=SGofCPLextrude(CPL,30,'y'); SGfigure(-30,30); SGTplotalpha(SG,'w'); % % See also: PLjunkerhallpart % % % Copyright 2022 Tim C. Lueth |
writetextfile(fname,txt)- writes a character string into a text file |
 | % writetextfile(fname,txt) - writes a character string intop a text file % (by Tim Lueth, VLFL-Lib, 2022-MÄR-10 as class: FILE HANDLING) % % Introduced first in SolidGeometry 5.2 % % See also: readtextfile % % wfname=writetextfile([fname,txt]) % === INPUT PARAMETERS === % fname: filenname for desktop or full path % txt: ascii text % === OUTPUT RESULTS ====== % wfname: full filename % % EXAMPLE: % writetextfile('test','this is a test') % % % See also: readtextfile % % % Copyright 2022 Tim C. Lueth |
SGpartslist(parts,newpartorpartslist)- appends parts to a parts list or parts lsit to parts list |
 | % SGpartslist(parts,newpartorpartslist) - appends parts to a parts list or parts lsit to parts list % (by Tim Lueth, VLFL-Lib, 2022-MÄR-10 as class: AUTOMATIC DESIGN) % % new parts are added by a string such as % % % % Introduced first in SolidGeometry 5.2 % % See also: SGpartslist, sprintftext, SGpartsfuncparams, % SGwriteMultipleSTL % % [parts,txt]=SGpartslist(parts,[newpartorpartslist]) % === INPUT PARAMETERS === % parts: parts list or empty for a new list % newpartorpartslist: either new parts or a parts list or a text output % === OUTPUT RESULTS ====== % parts: parts list % txt: text output to write into a file % % EXAMPLE: % SGpartslist([],'DIN912','DIN985','DINX'); pp=ans % SGpartslist(pp,'2 DIN912','3 DIN985','4 * DINX'); pp2=ans % SGpartslist(pp,pp2); pp3=ans % [~,b]=SGpartslist(pp,pp2) % [~,b]=SGpartslist([],b,b,b,b) % % See also: SGpartslist, sprintftext, SGpartsfuncparams, % SGwriteMultipleSTL % % % Copyright 2022 Tim C. Lueth |
SGanimateSLLL(SLLL,tmax)- Animates a set of solids using the SLLL format |
 | % SGanimateSLLL(SLLL,tmax) - Animates a set of solids using the SLLL format % (by Tim Lueth, VLFL-Lib, 2022-MÄR-10 as class: VISUALIZATION) % % The SLLL format is a cell list in wich each row contains the following % information % {Namestr, SG, TL-Framelist, color, [minlay maxlay]} % The 5th colum is not used bny this fnctn (Status of: 2022-03-10) % % Introduced first in SolidGeometry 5.2 % % See also: fourBarCLLL2SGdesign, drawnowvid, Videoquickrotate3D % % h=SGanimateSLLL(SLLL,[tmax]) % === INPUT PARAMETERS === % SLLL: {Namestr, SG, TL-Framelist, color, [minlay maxlay]} % tmax: time period to animate the movement; default is 10 sec % === OUTPUT RESULTS ====== % h: handle to solids and annotation % % EXAMPLE: % PosesampleHook; PS=ans; fourBarposesyntheses(PS,[1 2 3],16,[1 2 3],[1 3]);PS=ans; % fourBarposesortsolution(PS,'base-posy',[-inf -20],'ground-length','flip'); PSX=ans; % fourBarposelayering(PSX,1,[3 1.6 3],[0 1 -1 2],'wlim',[0 165]); CLLL=ans; % [a,b]=fourBarCLLL2SGdesign(CLLL,[3 1.6 3],'assembly','DIN7991'); % SGfigure; SGanimateSLLL(b,10); delete(ans); % Videoquickstart; SGfigure; SGanimateSLLL(b,10); Videoquickrotate3D; Videoquickcloseandopen; % % See also: fourBarCLLL2SGdesign, drawnowvid, Videoquickrotate3D % % % Copyright 2022 Tim C. Lueth |
PLaddauxpoints(PL,d)- adds auxilary points to an open point list |
 | % PLaddauxpoints(PL,d) - adds auxilary points to an open point list % (by Tim Lueth, VLFL-Lib, 2022-MÄR-09 as class: CLOSED POLYGON LISTS) % % same as RLaddauxpoints from 2013--807 % In contast to this fnctn PLaddauxpoints, the fnctn PLofCPLequidistant % returns just equal distant points % (Status of: 2022-03-09) % % Introduced first in SolidGeometry 5.2 % % See also: PLofCPLequidistant, RLaddauxpoints, CPLaddauxpoints, % CPLremdensity % % PLN=PLaddauxpoints(PL,d) % === INPUT PARAMETERS === % PL: Open Point list % d: distance of axuilary points % === OUTPUT RESULTS ====== % PLN: New Point list % % EXAMPLE: % CPLF=[-0 -0 ; 0 20; 30 30]; PLaddauxpoints(CPLF,5); % Open Contour PL add... % CPLF=[-0 -0 ; 0 20; 30 30]; RLaddauxpoints(CPLF,5); % Closed Contour RL add.. % CPLF=[-0 -0 ; 0 20; 30 30]; CPLaddauxpoints(CPLF,5); % Nested Contours CPL add.. % % See also: PLofCPLequidistant, RLaddauxpoints, CPLaddauxpoints, % CPLremdensity % % % Copyright 2022 Tim C. Lueth |
Videoquickrotate3D(lim)- records a manual movement of the 3D View using rotate3d by drawnowvid |
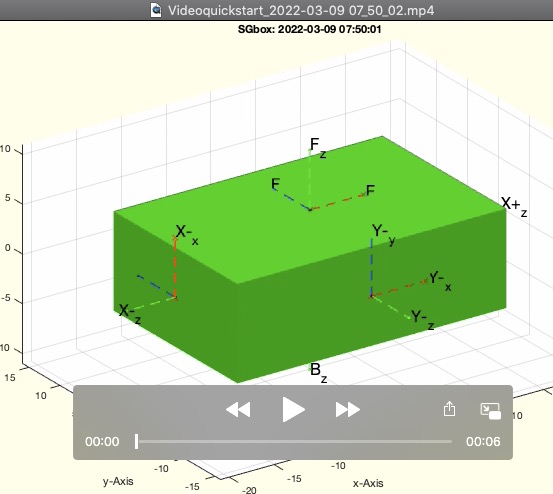 | % Videoquickrotate3D(lim) - records a manual movement of the 3D View using rotate3d by drawnowvid % (by Tim Lueth, VLFL-Lib, 2022-MÄR-08 as class: VIDEO/AUDIO/PDF) % % There is a time span of 3 seconds to change the viewpoint in the graph. % As soon as the viewpoint is changed, the recording of the movement % starts as a list of angles. Immediately after another movement pause of % 3 seconds, the movement is repeated and this time written to a video % file with drawnowvid if it was previously opened with Videoquickstart. % Otherwise one sees only a repeated movement. it is planned with the % fnctn also recorded courses to play automatically. (Status of: % 2022-05-04) % % Introduced first in SolidGeometry 5.2 % % See also: viewsmooth, animatego, figurerotate, drawnowvid % % awt=Videoquickrotate3D([lim]) % === INPUT PARAMETERS === % lim: waiting time before stop OR awt sequnce list for % === OUTPUT RESULTS ====== % awt: List of view angles and time period % % EXAMPLE: % SGbox; Videoquickstart; Videoquickrotate3D; awt=ans; Videoquickcloseandopen; awt % record video % SGbox; Videoquickstart; Videoquickrotate3D(awt); Videoquickcloseandopen; % replay sequence % % See also: viewsmooth, animatego, figurerotate, drawnowvid % % % Copyright 2022 Tim C. Lueth |
fourbarposesearchcouplercurve(PS,CPLF,acc,rots)- sorts 4bar solutions wrt minimal distance of coupler path to a given set of points |
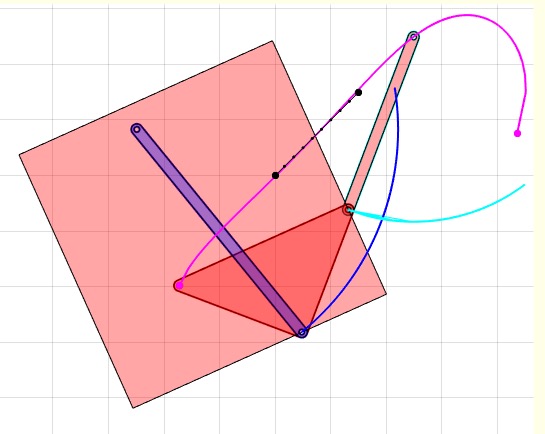 | % fourbarposesearchcouplercurve(PS,CPLF,acc,rots) - sorts 4bar solutions wrt minimal distance of coupler path to a given set of points % (by Tim Lueth, VLFL-Lib, 2022-MÄR-03 as class: KINEMATICS AND FRAMES) % % The solutions are sorted by the square distance to points of the point % list CPLF. If only the start and end points of a straight line are % specified, then only these two points are optimized. If you want to % search a straight line, then many points must lie on this straight % line. For this you can use PLaddauxpoints, RLaddauxpoints, % CPLaddauxpoints. The point distribution can also be used to achieve a % weighting of the locality fidelity by allowing the important points to % occur more frequently in the point list. % Since the Points of CPLF are used to calculate the minimal distance, % the non fitting part of the Pose does not disadvantage a solution % it is also possible to add an angle diffence list (Status of: % 2022-03-09) % % Introduced first in SolidGeometry 5.2 % % See also: fourBarposesyntheses, fourBarposesortsolution, % fourBarposeplotsolution % % [PSX,di]=fourbarposesearchcouplercurve(PS,[CPLF,acc,rots]) % === INPUT PARAMETERS === % PS: Pose struct % CPLF: Point List or contour considered as SET of points! % acc: [min max]; default is [0 inf] % rots: true==rotating, false=non rotating; default is '' % === OUTPUT RESULTS ====== % PSX: Pose struct sorted by minimal square distance % di: sum of minimal square distance % % EXAMPLE: % Posesample(29); PS=ans; % Just squares % fourBarposesyntheses(PS,1,[16]);PS=ans; % 57104 solution were found using 1-Pose-Synthesis. % CPLF=[0 0 ; 30 30]; fourbarposesearchcouplercurve(PS,CPLF); PSX=ans; SGfigure;PLplot(CPLF,'b-',2); fourBarposeplotsolution(PSX,1,'animate') % SGfigure; PLplot(CPLF,'k-',2);PLplot(CPLF([1,end],:),'k*',2); fourBarposeplotsolution(PSX,1,'animate'); % CPLF=[-0 -0 ; 10 20; 30 30]; CPLF=PLaddauxpoints(CPLF,5); fourbarposesearchcouplercurve(PS,CPLF); PSX=ans; % CPLF=PLcircle(50,'',pi/2)+[10 20]; fourbarposesearchcouplercurve(PS,CPLF); PSX=ans; % CPLF=PLcircle(50,'',pi/2)+[10 20]; fourbarposesearchcouplercurve(PS,CPLF,[1 5],true); PSX=ans; % only rotating % % See also: fourBarposesyntheses, fourBarposesortsolution, % fourBarposeplotsolution % % % Copyright 2022 Tim C. Lueth |
PLBezierC(PL,k)- Bezier splines for open point list |
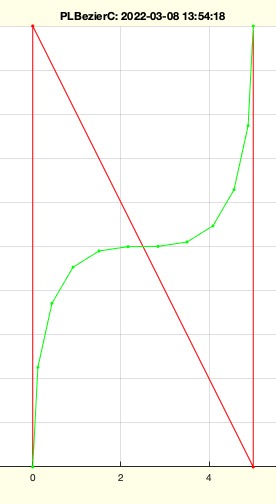 | % PLBezierC(PL,k) - Bezier splines for open point list % (by Tim Lueth, VLFL-Lib, 2022-MÄR-03 as class: CLOSED POLYGON LISTS) % % exactly the same as VLBezierC but handles the 2D output (Status of: % 2022-03-08) % % Introduced first in SolidGeometry 5.2 % % See also: VLBezierC % % PL=PLBezierC(PL,[k]) % === INPUT PARAMETERS === % PL: 2D Point list % k: number of points of the Bezier curve; default is size(PL,1) % === OUTPUT RESULTS ====== % PL: 2D Point list % % EXAMPLE: % PLBezierC(PLsample(6),12) % % See also: VLBezierC % % % Copyright 2022 Tim C. Lueth |
str2numendsWith(ttt)- returns the number that are part of in a string |
 | % str2numendsWith(ttt) - returns the number that are part of in a string % (by Tim Lueth, VLFL-Lib, 2022-FEB-26 as class: AUXILIARY PROCEDURES) % % Many DICOM files or CT raw data files contain number that describe the % order. This fnctn extracts the numbers that are part of a string % (Status of: 2022-02-26) % % Introduced first in SolidGeometry 5.2 % % See also: str2num, elem2array, elem2cell % % nn=str2numendsWith(ttt) % === INPUT PARAMETERS === % ttt: string or cell list of strings % === OUTPUT RESULTS ====== % nn: rows with numbers for each string of the cell list % % EXAMPLE: % a=dir('/Users/lueth/Desktop/imstack_imstack_300/*.raw') % find all raw files in a folder % ttt={a.name}' % create a cell list from the multiple results % str2numendsWith({a.name}'); nn=ans % % See also: str2num, elem2array, elem2cell % % % Copyright 2022 Tim C. Lueth |
PLELconcat(PL1,EL1,PL2,EL2,lnk,CPL)- concatenates two different PL and EL and connects them |
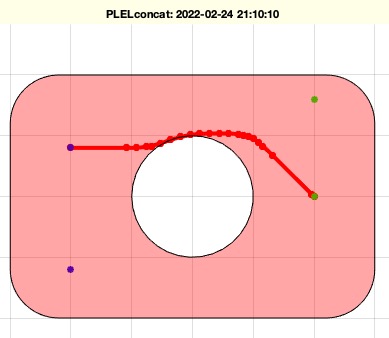 | % PLELconcat(PL1,EL1,PL2,EL2,lnk,CPL) - concatenates two different PL and EL and connects them % (by Tim Lueth, VLFL-Lib, 2022-FEB-24 as class: CLOSED POLYGON LISTS) % % More complex than VLFLcat because of collision free search path (Status % of: 2022-02-24) % % Introduced first in SolidGeometry 5.2 % % See also: VLFLcat2, crossC2P, PLshortestpathinCPLcost, % VLnearestNeighborN % % [PL,EL]=PLELconcat(PL1,EL1,PL2,EL2,[lnk,CPL]) % === INPUT PARAMETERS === % PL1: Point list 1 % EL1: Edge list 1 % PL2: Point list 2 % EL2: Edge list 2 % lnk: if true; an additional edge is created to connect PL1 and PL2; % default is false % CPL: to connecting edges should be collision free inside a CPL % === OUTPUT RESULTS ====== % PL: Point List % EL: Edge List % % EXAMPLE: % PL1=rand(4,2)*20; EL1=ELofPL(PL1,true); PL2=rand(3,2)*20+[10 0]; EL2=ELofPL(PL2,true); % PLELconcat(PL1,EL1,PL2,EL2) % PLELconcat(PL1,EL1,PL2,EL2,true) % % PLELconcat([-10 -6; -10 4],'',[10 0; 10 8;],''); % PLELconcat([-10 -6; -10 4],'',[10 0; 10 8;],'',true); % PLELconcat([-10 -6; -10 4],'',[10 0; 10 8;],'',true,CPLsample(31)); % % See also: VLFLcat2, crossC2P, PLshortestpathinCPLcost, % VLnearestNeighborN % % % Copyright 2022 Tim C. Lueth |
CPLskeletonsearch(CPL,)- creates a point list and an edge list |
 | % CPLskeletonsearch(CPL,) - creates a point list and an edge list % (by Tim Lueth, VLFL-Lib, 2022-FEB-24 as class: CLOSED POLYGON LISTS) % % Complex recursive fnctn including path planning % Finds a skeleton by shinking the contour until it breaks into points, % lines, or separateed contours. The detected points or lines are linked % trough straigt lines or collision free pathes around the holes, if this % is possible % The skeleton fnctn is useful for many automatic construction fnctn % (Status of: 2022-05-05) % % Introduced first in SolidGeometry 5.2 % % See also: CPLskeleton, CPLregionshrink, CPLregionbufferintersect, % PLELconcat, matrixskeleton % % [PL,EL]=CPLskeletonsearch(CPL,[]) % === INPUT PARAMETERS === % CPL: Closed contour line % === OUTPUT RESULTS ====== % PL: Point list % EL: Edge list % % EXAMPLE: % CPLskeletonsearch(CPLsample(35)) % CPLskeletonsearch(CPLsample(41)) % CPLskeletonsearch(CPLsample(40)) % CPLskeletonsearch(CPLsample(10)); [a,b]=CPLskeletonsearch(CPLsample(10)) % CPLskeletonsearch([CPLsample(3);nan nan;PLcircle(2)]) % CPLskeletonsearch([CPLsample(3)]) % % See also: CPLskeleton, CPLregionshrink, CPLregionbufferintersect, % PLELconcat, matrixskeleton % % % Copyright 2022 Tim C. Lueth |
CPLregionbufferintersect(CPL,dx)- detects the overlapping area of increased regions |
 | % CPLregionbufferintersect(CPL,dx) - detects the overlapping area of increased regions % (by Tim Lueth, VLFL-Lib, 2022-FEB-24 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: CPLbuffer, CPLregionshrink % % [cc,vv,reg]=CPLregionbufferintersect(CPL,[dx]) % === INPUT PARAMETERS === % CPL: Original CPL % dx: buffered % === OUTPUT RESULTS ====== % cc: cell list if overlapping polyshapes % vv: list of comparision [i k] % reg: cell list of regions % % EXAMPLE: % CPLregionbufferintersect(CPLsample(41),1) % [x,vv]=CPLregionbufferintersect(CPLsample(41),1) % % See also: CPLbuffer, CPLregionshrink % % % Copyright 2022 Tim C. Lueth |
strhyperlink2str(str)- separates hyperlinks into real text and a list of keywords plus a list of urls |
 | % strhyperlink2str(str) - separates hyperlinks into real text and a list of keywords plus a list of urls % (by Tim Lueth, VLFL-Lib, 2022-FEB-24 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 5.2 % % See also: strhyperlink, sprintfhyperlinktab % % [str,wrds,urls]=strhyperlink2str(str) % === INPUT PARAMETERS === % str: string includes hyperlinks % === OUTPUT RESULTS ====== % str: string without hyperlinks % wrds: list of keywords used in in original string % urls: list of urls used in in original string % % EXAMPLE: % a=strhyperlink('test','http://www.mimed.de') % strhyperlink2str(a) % % See also: strhyperlink, sprintfhyperlinktab % % % Copyright 2022 Tim C. Lueth |
PosesampleHook- Pose sample for Hook Movement Task |
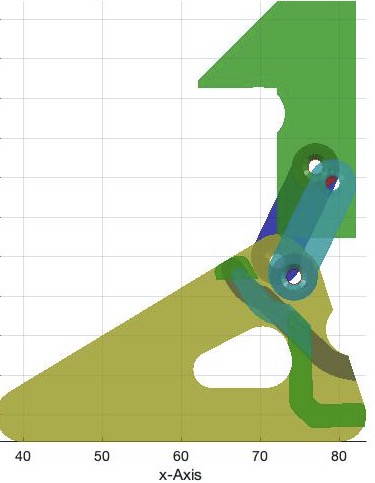 | % PosesampleHook - Pose sample for Hook Movement Task % (by Tim Lueth, VLFL-Lib, 2022-FEB-22 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 5.2 % % See also: PosesampleHook, VLFL_EXP69 % % PS=PosesampleHook % === OUTPUT RESULTS ====== % PS: returns the Pose task for a hook % % See also: PosesampleHook, VLFL_EXP69 % % % Copyright 2022 Tim C. Lueth |
PLhook(h,w,o,a,r)- creates the shape of a hook |
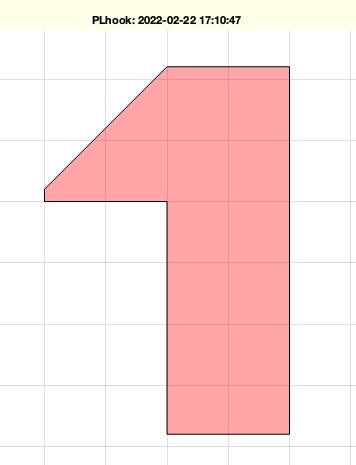 | % PLhook(h,w,o,a,r) - creates the shape of a hook % (by Tim Lueth, VLFL-Lib, 2022-FEB-22 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 5.2 % % See also: PLarrow, PLshaft, PLshaftrad, PLevolvente, PLthreadDIN % % PL=PLhook([h,w,o,a,r]) % === INPUT PARAMETERS === % h: height % w: widht % o: overhang % a: angle; default is 45 degree % r: radial edges % === OUTPUT RESULTS ====== % PL: PL % % EXAMPLE: % PLhook(30,10,[10 1],'',0) % % See also: PLarrow, PLshaft, PLshaftrad, PLevolvente, PLthreadDIN % % % Copyright 2022 Tim C. Lueth |
