SGTdrill(SG,N,t,CPL)- drills a contour hole into a solid geometries frame |
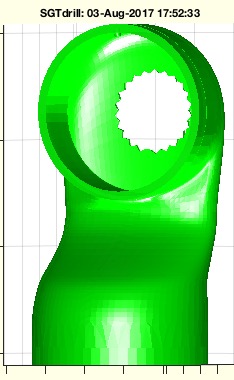 | % SGTdrill(SG,N,t,CPL) - drills a contour hole into a solid geometries frame % (by Tim Lueth, VLFL-Lib, 2017-AUG-03 as class: SURFACES) % % This fnctn can also be used to create fittings depending on a specific % 3D-printer % For example if a drilling hole has been designed, % there is no need to increase the bore diameter on a SLS=Printer such as % EOS formiga % but there is a need to increase the bore diameter on a FORM2+=Printer % by 0.2mm % (Status of: 2020-07-24) % % Introduced first in SolidGeometry 4.0 % % See also: SGbool4, SGT, SGfittinggauge, TofFS, SGTset % % SG=SGTdrill(SG,[N,t,CPL]) % === INPUT PARAMETERS === % SG: Solid Geometry % N: Name of Frame; default is 'B' % t: depth of hole % CPL: radius or contour % === OUTPUT RESULTS ====== % SG: Solid Geometry with hole % % EXAMPLE: % A=SGbox([30,20,10]); A=SGTset(A,'B',TofP([0 0 5])) % SGTdrill(A,'',1,5) % % % See also: SGbool4, SGT, SGfittinggauge, TofFS, SGTset % % % Copyright 2017-2020 Tim C. Lueth |
copyfig(cf,nf)- copies a axis diagramm into a new MATLAB figure |
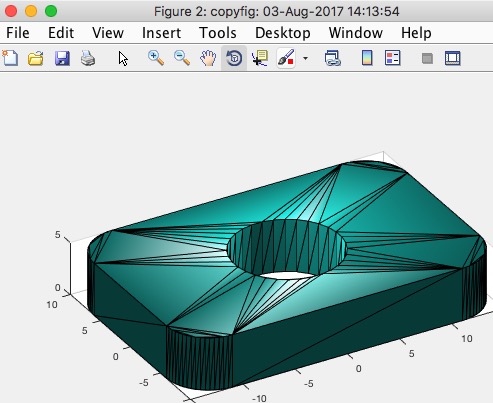 | % copyfig(cf,nf) - copies a axis diagramm into a new MATLAB figure % (by Tim Lueth, VLFL-Lib, 2017-AUG-03 as class: USER INTERFACE) % % Menue, colors, grid, etc. are not copied. (Status of: 2020-08-04) % % Introduced first in SolidGeometry 4.0 % % See also: copyplot, snapplot, copyobj, movegui, subfig, pushgcf, popgcf % % nf=copyfig([cf,nf]) % === INPUT PARAMETERS === % cf: copy figure handle; default is gcf/gca % nf: optional number/handle to figure to copy to. % === OUTPUT RESULTS ====== % nf: new figure handle % % EXAMPLE: % SGfigure(SGsample(27)); view(-30,30); % copyfig % % See also: copyplot, snapplot, copyobj, movegui, subfig, pushgcf, popgcf % % % Copyright 2017-2021 Tim C. Lueth |
SGcutT(SG,Ts,centxy,expl,ct)- cuts an object below a arbitrary plane using SGcut relative to the center of floor of bb |
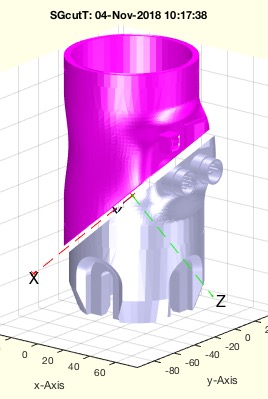 | % SGcutT(SG,Ts,centxy,expl,ct) - cuts an object below a arbitrary plane using SGcut relative to the center of floor of bb % (by Tim Lueth, VLFL-Lib, 2017-AUG-02 as class: SURFACES) % % Beside Franz Irlinger who introduce me into the beauty of mechanism % instead of robots, I'd like to thank Marcus Rompf and Henning Schober, % both involved into the design of accordion mechanics. (Status of: % 2021-03-13) % % Introduced first in SolidGeometry 4.0 % % See also: BBofSGcutT, SGcut, SGcut2, SGcutBB, SGcutTd, % SGcutTcrossblade, SGcutTcylindricblade, SGseparatebyT % % [SGU,SGO,Ts,Ufi,Ofi]=SGcutT([SG,Ts,centxy,expl,ct]) % === INPUT PARAMETERS === % SG: Solid Geoemtry or empty for SGofgca % Ts: cutting plane to cut under; or empty for interactive select % centxy: if true, center the SG on xy-plane; default=false | new in 4.1 % expl: explosion distance of the solids; % ct: 'a'xial, 'c'oronal, 's'agital, default is '-a' % === OUTPUT RESULTS ====== % SGU: New lower geometry (Magenta) % SGO: New upper geometry (Grey) % Ts: T Surface - HT Matrix of the cut if T was selected interactively % Ufi: Facet index for the crossing facet of the lower part % Ofi: Facet index for the crossing facet of the upper part % % EXAMPLE: % load JACO_robot.mat % SGcutT(JC0,TofR(rot(pi/6,pi/6,pi/6),[0 0 100]),true) % SGcutT(JC0,TofR(rot(pi/6,pi/6,pi/6),[0 0 100])) % SGcutT(JC0) % SGcutT(JC0,'','',5) % % See also: BBofSGcutT, SGcut, SGcut2, SGcutBB, SGcutTd, % SGcutTcrossblade, SGcutTcylindricblade, SGseparatebyT % % % Copyright 2017-2021 Tim C. Lueth |
cputoc- similar to toc but uses the cpu timer |
 | % cputoc - similar to toc but uses the cpu timer % (by Tim Lueth, VLFL-Lib, 2017-AUG-01 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: cputic, cputime, timeit % % tc=cputoc % === OUTPUT RESULTS ====== % tc: Elapsed cpu time in seconds % % EXAMPLE: % tic; for i=10000000000; x=cos(pi/16); end; toc % cputic; for i=10000000000; x=cos(pi/16); end; cputoc % f=@() cos(pi/3), timeit(f) % % See also: cputic, cputime, timeit % % % Copyright 2017 Tim C. Lueth |
cputic- similar to tic but uses the cpu timer |
 | % cputic - similar to tic but uses the cpu timer % (by Tim Lueth, VLFL-Lib, 2017-AUG-01 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: cputoc, cputime, timeit % % cputic % % EXAMPLE: % tic; for i=10000000000; x=cos(pi/16); end; toc % cputic; for i=10000000000; x=cos(pi/16); end; cputoc % f=@() cos(pi/3), timeit(f) % % See also: cputoc, cputime, timeit % % % Copyright 2017 Tim C. Lueth |
collofBBs(bba,bbb,first)- returns from two bounding box list the colliding index lists |
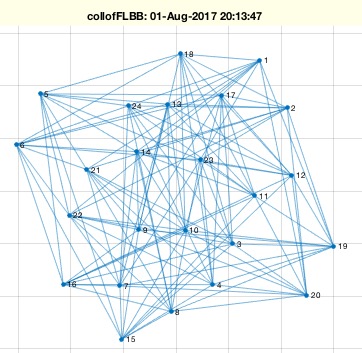 | % collofBBs(bba,bbb,first) - returns from two bounding box list the colliding index lists % (by Tim Lueth, VLFL-Lib, 2017-AUG-01 as class: ANALYZING PROCEDURES) % % This fnctn can be used directly to preprocess, i.e. accelerate facet % crossing fnctns (Status of: 2018-08-20) % % Introduced first in SolidGeometry 4.0 % % See also: VLDLBBofVLFL % % [CL,ca,cb]=collofBBs(bba,bbb,[first]) % === INPUT PARAMETERS === % bba: bounding box list A % bbb: bounding box list B % first: if true; fnctn stops after first hit; default is false % === OUTPUT RESULTS ====== % CL: Crossing list [n x 2] = [ia ib] % ca: optional list of crossing boxes in A; ca=unique(CL(:,1),'stable'); % cb: optional list of crossing boxes in B; cb=unique(CL(:,2),'stable'); % % EXAMPLE: % A=SGbox([30,20,10]); % [~,~,~,~,~,~,bb]=VLDLBBofVLFL(A.VL,A.FL,1) % collofBBs(bb,bb) % % See also: VLDLBBofVLFL % % % Copyright 2017-2020 Tim C. Lueth |
SGbool4(flag,A,B,thr)- returns the result of a boolean operation on two closed elementary solids |
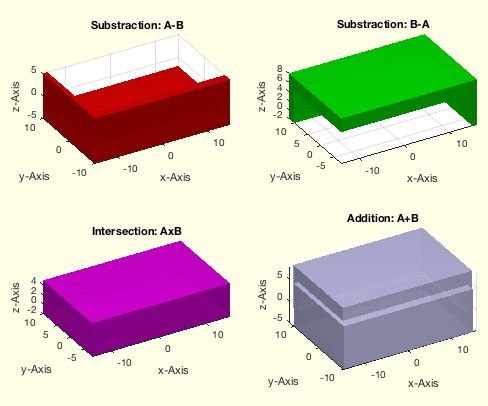 | % SGbool4(flag,A,B,thr) - returns the result of a boolean operation on two closed elementary solids % (by Tim Lueth, VLFL-Lib, 2017-AUG-01 as class: SURFACES) % % ATTENTION: SGbool4 is the same fnctn as SGbool3, but much faster. It % uses the - now public - fnctns % SGintersectFacetPoints and VLFLinsertFacetPoints which were private in % SGbool3. It has a more clear structure, but has exactly the same % algorith for face assignment. In addition it shows all four possible % results of SGbool for two solids. Use CSGsample for testing. % Nevertheless, it should be clear that there are limitations even of % closed surface models with SGbool3 and SGBool4: % 1. Never have identical points in both surfaces % 2. Never have identical lines in both surfaces % 3. Never have indentical surface planes in both surfaces % 4. Never have an overlap of enclosed "holes" => unmotivated surfaces % If there is a risc, use SGgrow to grow before substraction or addition % by 1e-4 % It is possible to remove those problems one day by cutting tetrahedrons % instead of triangles % A => A without B % B => B without A % + => A combined with B % x => A intersected with B % (Status of: 2017-08-08) % % Introduced first in SolidGeometry 4.0 % % See also: SGbool, SGbool2, SGbool3 % % SGX=SGbool4(flag,A,B,[thr]) % === INPUT PARAMETERS === % flag: Boolean operator ('AB+x') % A: Solid A (VL/FL) % B: Solid B (VL/FL) % thr: threshold for grid; default is 1e-5 % === OUTPUT RESULTS ====== % SGX: resulting surface geometry % % EXAMPLE: % [A,B]=CSGsample(1); SGbool4('-',A,B); % [A,B]=CSGsample(2); SGbool4('-',A,B); % [A,B]=CSGsample(3); SGbool4('-',A,B); % Problems with crossing holes % [A,B]=CSGsample(4); SGbool4('-',A,B); % % % See also: SGbool, SGbool2, SGbool3 % % % Copyright 2017 Tim C. Lueth |
VLDLBBofVLFL(VL,FL,thr)- returns for a facet list the vertex coordinates, the edge vectors, and the bounding box of the facets |
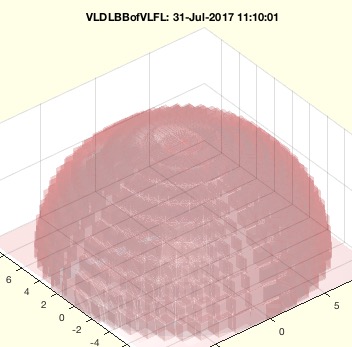 | % VLDLBBofVLFL(VL,FL,thr) - returns for a facet list the vertex coordinates, the edge vectors, and the bounding box of the facets % (by Tim Lueth, VLFL-Lib, 2017-JUL-31 as class: SURFACES) % % This fnctn returns for a facet list the vertex coordinates, the edge % vectors, and the bounding box of the facets. Is also used in some other % fnctn with global variables. % The bounding box list can be used for fast comparison of facets before % a crossing check (Status of: 2020-01-11) % % Introduced first in SolidGeometry 4.0 % % See also: crossingfacets2VLFL, collofBBs, VLisInteriorofBBlist, % BBaddtolerance % % [v1,v2,v3,d1,d2,d3,bb]=VLDLBBofVLFL(VL,FL,[thr]) % === INPUT PARAMETERS === % VL: Vertex list % FL: Facet List % thr: supplement to bounding boxes; default is 1e-12 % === OUTPUT RESULTS ====== % v1: List of first vertex of facet list: v1=VL(FL(:,1),:); % v2: List of second vertex of facet list: v2=VL(FL(:,2),:); % v3: List of thried vertex of facet list: v3=VL(FL(:,3),:); % d1: d1=v2-v1; % d2: d2=v3-v2; % d3: d3=v1-v3; % bb: bounding box of all facets; % % EXAMPLE: % A=SGsample(18); VLDLBBofVLFL(A.VL,A.FL); % A=SGsample(19); VLDLBBofVLFL(A.VL,A.FL); % A=SGsample(27); VLDLBBofVLFL(A.VL,A.FL); % % See also: crossingfacets2VLFL, collofBBs, VLisInteriorofBBlist, % BBaddtolerance % % % Copyright 2017-2020 Tim C. Lueth |
CPLdisttopoint(CPL,p);- returns the minmal distance between a contour and a given point |
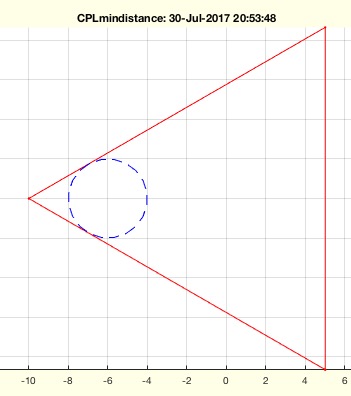 | % CPLdisttopoint(CPL,p); - returns the minmal distance between a contour and a given point % (by Tim Lueth, VLFL-Lib, 2017-JUL-30 as class: ANALYTICAL GEOMETRY) % % for each edge/ conenction between two points, the distance to the % origin or the optional point p is calculated (Status of: 2018-08-27) % % Introduced first in SolidGeometry 4.0 % % See also: centerCPL, CPLdistance % % LITERATURE: % https://en.wikipedia.org/wiki/Distance_from_a_point_to_a_line % % dmin=CPLdisttopoint(CPL,[p]); % === INPUT PARAMETERS === % CPL: Closed polygon line % p: point of interest; default is [0 0] % === OUTPUT RESULTS ====== % dmin: radius of the minmal circle that touches the contour % % EXAMPLE: % CPLdisttopoint(CPLofPL(PLcircle(10,3)),[-6 0]) % % See also: centerCPL, CPLdistance % % % Copyright 2017-2021 Tim C. Lueth |
SGtorquelimiter(R,m,t,h)- returns a torque limiter part |
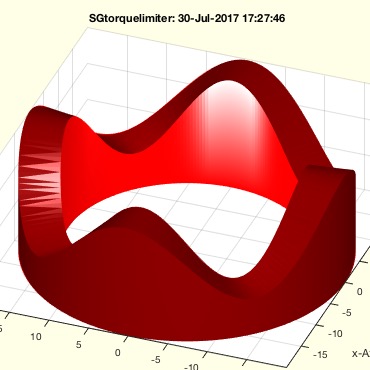 | % SGtorquelimiter(R,m,t,h) - returns a torque limiter part % (by Tim Lueth, VLFL-Lib, 2017-JUL-30 as class: MODELING PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: SGsnaprivet, SGtorquefuse % % SG=SGtorquelimiter([R,m,t,h]) % === INPUT PARAMETERS === % R: Radius [Router Rinner] % m: modul; number of fnctns / cosinus % t: amplitude of cosinus % h: height of the solid % === OUTPUT RESULTS ====== % SG: Solid geometry % % EXAMPLE: % SGtorquelimiter % % % See also: SGsnaprivet, SGtorquefuse % % % Copyright 2017-2019 Tim C. Lueth |
zigzag(x,per)- returns a zig zag curve in the interval [0 2*pi] |
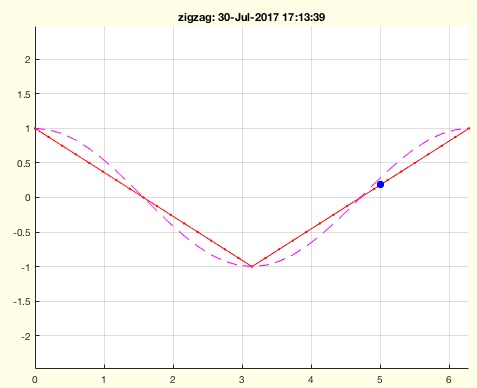 | % zigzag(x,per) - returns a zig zag curve in the interval [0 2*pi] % (by Tim Lueth, VLFL-Lib, 2017-JUL-30 as class: ANALYTICAL GEOMETRY) % % corresponds to cosinus fnctn (Status of: 2017-07-30) % % Introduced first in SolidGeometry 4.0 % % See also: sin, cos % % y=zigzag(x,[per]) % === INPUT PARAMETERS === % x: x value % per: periode; default is 2*pi % === OUTPUT RESULTS ====== % y: zigzag value % % EXAMPLE: % zigzag(0) % zigzag(0:2*pi) % zigzag(1,4) % % See also: sin, cos % % % Copyright 2017 Tim C. Lueth |
FLofVLdelaunay(VL,md,al,ez)- creates a delaunay tesselation in 2D of a VL with respect to a ez vector; |
 | % FLofVLdelaunay(VL,md,al,ez) - creates a delaunay tesselation in 2D of a VL with respect to a ez vector; % (by Tim Lueth, VLFL-Lib, 2017-JUL-30 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: VLofVM, SGofVMdelaunay, SGofVMisosurface, SGofVMmarchcube % % FL=FLofVLdelaunay(VL,[md,al,ez]) % === INPUT PARAMETERS === % VL: Vertex list % md: expected distance between vertices; default is mean value % al: accepted angle deviation from central projection; default is % 0.5/pi*180 ~ 22 degree % ez: default is [0 0 1]; if ez is []; T of VL is used to find the % orientation % === OUTPUT RESULTS ====== % FL: Facet list % % EXAMPLE: % SR300getPointclouds('','',20); PC=ans; % VL=pcdownsample(PC{1},'gridAverage',1); VL=VL.Location; FLofVLdelaunay(VL); % % See also: VLofVM, SGofVMdelaunay, SGofVMisosurface, SGofVMmarchcube % % % Copyright 2017-2018 Tim C. Lueth |
SGTrotate(SG,N,ax,val)- returns a solid rotated around a Frame coordinate System |
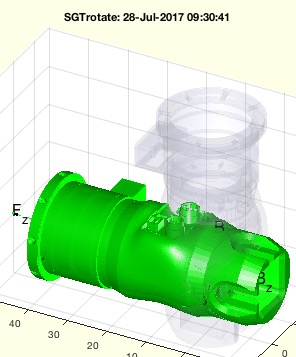 | % SGTrotate(SG,N,ax,val) - returns a solid rotated around a Frame coordinate System % (by Tim Lueth, VLFL-Lib, 2017-JUL-28 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.0 % % See also: SGtransT, SGrotate % % SGN=SGTrotate(SG,[N,ax,val]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % N: Frame; default is ez; nan means eigenvectors; default is 'B' % ax: rotation axis sequence; 'xyz' or 'x' or 'z' % val: values for rotation; same as ax % === OUTPUT RESULTS ====== % SGN: Spatial rotated Solid includeing the frames % % See also: SGtransT, SGrotate % % % Copyright 2017 Tim C. Lueth |
SGplugofSGT(SG,N,h,ms,tol)- creates a plug for an SGT |
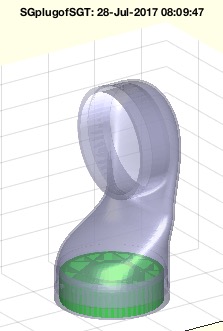 | % SGplugofSGT(SG,N,h,ms,tol) - creates a plug for an SGT % (by Tim Lueth, VLFL-Lib, 2017-JUL-28 as class: SURFACES) % % creates a plug for feature surface by orthogonal walls and leaves space % for a magnetic-connection. The plug is a honeycomp structure with a % rigid border that fits into the opening of the frame related surface. % In the center (Status of: 2017-07-29) % % Introduced first in SolidGeometry 4.0 % % See also: JACOmodel % % SGP=SGplugofSGT(SG,N,[h,ms,tol]) % === INPUT PARAMETERS === % SG: Solid geoemtry with frames % N: Name of frame, the plug is for % h: Optional height of plug; default is 5mm % ms: Diameter of a magnet; default is 10mm % tol: Tolerance for all values; default is 0.2mm (smaller) % === OUTPUT RESULTS ====== % SGP: Solid Geometry of the Plug % % See also: JACOmodel % % % Copyright 2017 Tim C. Lueth |
SGTsetofFS(SG,T,N,Rz,fs,fe)- creates a frame based on a features surface and a selector |
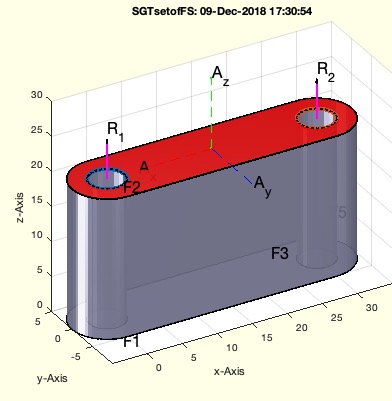 | % SGTsetofFS(SG,T,N,Rz,fs,fe) - creates a frame based on a features surface and a selector % (by Tim Lueth, VLFL-Lib, 2017-JUL-27 as class: KINEMATICS AND FRAMES) % % The selector can be % a) scalar: just the number of the feature surface % b) vector: the normal vector of the feature surface; % c) HT-matrix: at least a point and the normal vector must belong to the % surface % using this parameters, the feature surface is selected as clicked % d) now it is possible to select features % e) new it is possible to rotate by a simple value, rotation matrix or % transformation (Status of: 2018-12-09) % % Introduced first in SolidGeometry 4.0 % % See also: SGTui, SGTset, SGTsetorigin, SGTget % % [SGN,T,h,Rorg]=SGTsetofFS(SG,[T,N,Rz,fs,fe]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % T: Number of feature surface or normal vector of HT matrix % N: Name of 'Frame' to be set % Rz: optional rotation value, matrix or HT matrx % fs: optional Feature symbol such as 'R1'; % fe: feature edge/surface angle; default is 1rad ~ 60 degree % === OUTPUT RESULTS ====== % SGN: Sg with added Frame % T: Transformation matrix of frame % h: handle to graphics patch % Rorg: Radien list % % EXAMPLE: % SGofCPLcommand('Co 10 40 5, h 20, save A'); A=A.SG; % SGTsetofFS(A,2,'A'); % SGTsetofFS(A,2,'A',pi/2); % SGTsetofFS(A,2,'A',pi/2,'R2'); % % See also: SGTui, SGTset, SGTsetorigin, SGTget % % % Copyright 2017-2020 Tim C. Lueth |
exp_2017_07_27 (SG)- EXPERIMENT to compare the pdegplot(model,'Facelabel','on') with FSplot |
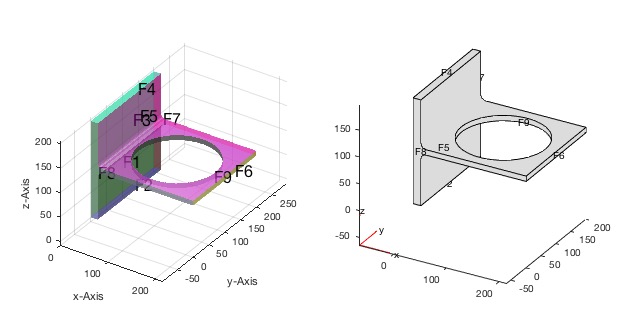 | % exp_2017_07_27 (SG) - EXPERIMENT to compare the pdegplot(model,'Facelabel','on') with FSplot % (by Tim Lueth, VLFL-Lib, 2017-JUL-27 as class: EXPERIMENTS) % % currently it looks identically. May be same strategy and the same % alhpha angle of ~1 (60 degree) (Status of: 2017-07-27) % % Introduced first in SolidGeometry 4.0 % % exp_2017_07_27([SG]) % === INPUT PARAMETERS === % SG: Solid Geometry % % EXAMPLE: % SG=SGreadSTL(which('BracketWithHole.stl'),1000); % % % % % % Copyright 2017 Tim C. Lueth |
FSplot(TR,alp,fsi,col,siz);- plots the featureEdges of TR, SG or VLFL |
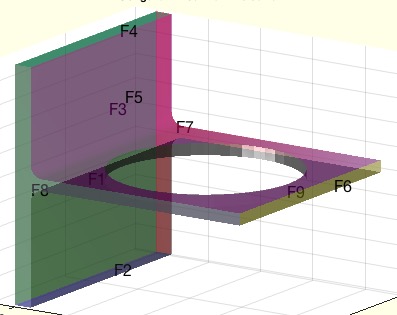 | % FSplot(TR,alp,fsi,col,siz); - plots the featureEdges of TR, SG or VLFL % (by Tim Lueth, VLFL-Lib, 2017-JUL-27 as class: VISUALIZATION) % % Similar to FE plot, it plots the feature surfaces of a solid; % Feature surfaces are not officially supported by matlab, nevertheless % there the pde toolbox for instance has a facet plot, which is % comparable to FS. % In contrast to pdeplotfaces, the SG-Lib gives you full access to the % feature surfaces using surfacesofSG. Especially for automatic design it % is necessary to select surfaces in many different ways, such as a % normal vector. Also information on the faces are required. (Status of: % 2017-08-25) % % Introduced first in SolidGeometry 4.0 % % See also: FEplot, surfacesofSG, textVLFS, pdeplotfaces, pdegplot % % h=FSplot([TR,alp,fsi,col,siz]); % === INPUT PARAMETERS === % TR: surface (Tetrahedron, Triangulation, Solid) % alp: alpha value for neigbor facets % fsi: selected FS; depend on alpha; default is all % col: color of FS; default is colofn % siz: size of descriptiors; default is 16 % === OUTPUT RESULTS ====== % h: handle to graphics object consisting of text and patches % % EXAMPLE: FSplot(SGsample(3)) % SG=SGreadSTL(which('BracketWithHole.stl'),1000); % SGfigure; FSplot(SG,1) % SGfigure; FSplot(SG,0.1); % SGfigure; FSplot(SG,1,[4 6]); % SGfigure; FSplot(SG,1,[4 6],'r'); % SGfigure; FSplot(SG,1,[4 6],'r',30); % % See also: FEplot, surfacesofSG, textVLFS, pdeplotfaces, pdegplot % % % Copyright 2017-2018 Tim C. Lueth |
csgofPL(PL,sf)- returns MATLAB's Constructed Solid Geometry (CSG) dg matrix for a list of polygons |
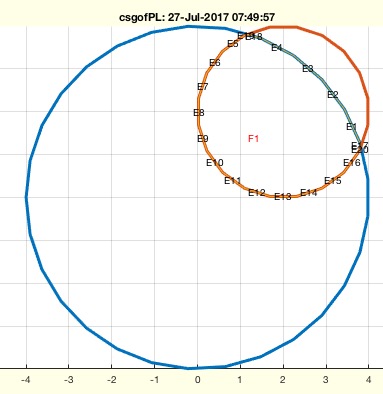 | % csgofPL(PL,sf) - returns MATLAB's Constructed Solid Geometry (CSG) dg matrix for a list of polygons % (by Tim Lueth, VLFL-Lib, 2017-JUL-26 as class: CLOSED POLYGON LISTS) % % TIP: Currently I do not see an advantage to use csg Constructed Solid % Geometry (CSG) instead of boundary Representation (BREP) which is the % foundation of the SG-Lib. Nevertheless, an interface should exist. % % Matlab supports for 2D geometries the method Constructed Solid % Geometries (CSG) Decompositon already before 2006a. This fnctn converts % a Point List into a csg or gd (Geometric Description Matrix). % It is possible either to convert a PL into the 2D csg format for one % polygon or % It is possible to convert a cell list of Polygon plus a string formular % into a geoemetric matrix. % Currently the first polygon is "A", the second "B" and so on. % The Formula is a string of Type "A+B" or "A-B" "A*B" or "A" or "B". % (Status of: 2017-07-27) % % Introduced first in SolidGeometry 4.0 % % See also: decsg, pdemodel, geometryFromEdges, pdegeom, CPLpolybool % % [csg,bt]=csgofPL(PL,[sf]) % === INPUT PARAMETERS === % PL: CPL of cell list of CPLs % sf: Formula wrt. to A polygon sequence 'A' 'B' 'C' etc. % === OUTPUT RESULTS ====== % csg: or dg (Geometry description matrix) % bt: % % EXAMPLE: % csgofPL(PLstar(10)); % returns matlab's CSG polygon list format % csgofPL({PLstar(10)},'A') % returns the geometry list of 1st Polygon % csgofPL({PLcircle(4);PLcircle(2)+2},'A') % csgofPL({PLcircle(4);PLcircle(2)+2},'B') % csgofPL({PLcircle(4);PLcircle(2)+2},'A+B') % csgofPL({PLcircle(4);PLcircle(2)+2},'A-B') % % % See also: decsg, pdemodel, geometryFromEdges, pdegeom, CPLpolybool % % % Copyright 2017 Tim C. Lueth |
CPLradialEdges(CPL,R)- returns a vertex list (VL) with rounded edges |
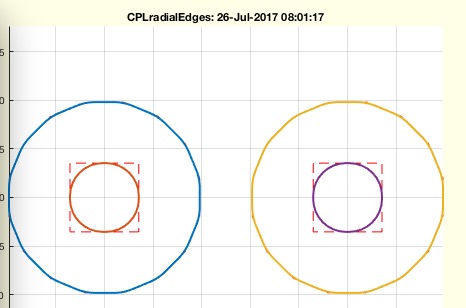 | % CPLradialEdges(CPL,R) - returns a vertex list (VL) with rounded edges % (by Tim Lueth, VLFL-Lib, 2017-JUL-26 as class: ANALYZING PROCEDURES) % % ATTENTION: This fnctn is based on VLradialEdges not on PLradialEdges % Replaces edges by a radial curve. The desired radius can be reduced % automatically if necessary. It is possible to maximize the radius % automatically. % In case that R is negative; VLbreakEdges is used instead (Status of: % 2017-07-26) % % Introduced first in SolidGeometry 4.0 % % See also: PLradialEdges, SGcontourtube, RLofEulerInterpolation, % VLinsertEulerSteps, VLradialEdges, TofPez, PLtangentcirc, % VLtangentcirc, SGbreakCorners, SGradialCorners % % CPLN=CPLradialEdges(CPL,[R]) % === INPUT PARAMETERS === % CPL: Vertex list nx3 % R: Radius; default is none % === OUTPUT RESULTS ====== % CPLN: New closed Polygon list; All points are doubled % % EXAMPLE: % CPLradialEdges(CPLsample(4),5); % CPLradialEdges(CPLsample(12),5); % CPLradialEdges(CPLsample(12),-4); % % See also: PLradialEdges, SGcontourtube, RLofEulerInterpolation, % VLinsertEulerSteps, VLradialEdges, TofPez, PLtangentcirc, % VLtangentcirc, SGbreakCorners, SGradialCorners % % % Copyright 2017 Tim C. Lueth |
SGchamfer_org(SG,ph,ed,r,stype)- chamfers the edges of a 2.5D Solid Geometry |
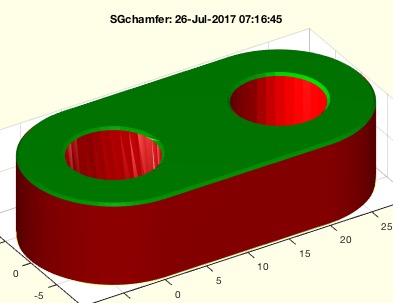 | % SGchamfer_org(SG,ph,ed,r,stype) - chamfers the edges of a 2.5D Solid Geometry % (by Tim Lueth, VLFL-Lib, 2017-JUL-26 as class: SURFACES) % % It does not returns as perfect edges as SGofCPLzchamfer (Status of: % 2017-08-16) % % Introduced first in SolidGeometry 4.0 % % See also: SGofCPLzchamfer, SGof2CPLzheurist, CPLradialEdges % % % SGN=SGchamfer_org(SG,[ph,ed,r,stype]) % === INPUT PARAMETERS === % SG: Solid Geometry with just two different z values % ph: edge/phase size default is 0.3 % ed: curved edges; default is true % r: radius for radial edges; default is 0 % stype: default is 'length'; see SGof2CPLzheurist % === OUTPUT RESULTS ====== % SGN: % % EXAMPLE: % SGchamfer(SGsample(2)) % SGchamfer(SGofCPLz(PLcircleoval(10,'',20,5),10)) % SGchamfer(SGofCPLz(PLstar(10),10),0.3,'') % SGchamfer(SGofCPLz(PLstar(10),10),0.3,'',2) % SGchamfer(SGofCPLz(PLstar(10),10),0.3,'',-0.5) % % See also: SGofCPLzchamfer, SGof2CPLzheurist, CPLradialEdges % % % % Copyright 2017-2018 Tim C. Lueth |
CPLfillin(CPL,Amin,Asam)- creates a contour that fills a another or several contours |
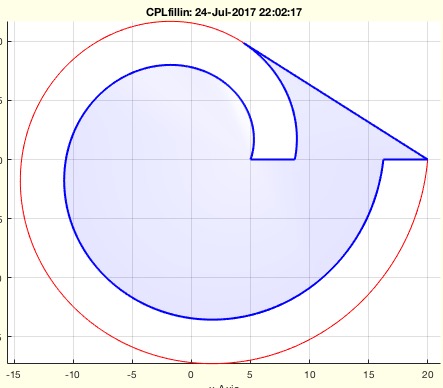 | % CPLfillin(CPL,Amin,Asam) - creates a contour that fills a another or several contours % (by Tim Lueth, VLFL-Lib, 2017-JUL-24 as class: CLOSED POLYGON LISTS) % % Powerful fnctn that is not the same as CPLpolybool! % Try to use CPLharbour too! (Status of: 2020-08-16) % % Introduced first in SolidGeometry 4.0 % % See also: CPLconvexhull, CPLconvexhulldelaunay, delaunayofCPL, % CPLharbour, CPLfillinside, CPLfillgap % % [iCPL,A]=CPLfillin(CPL,[Amin,Asam]) % === INPUT PARAMETERS === % CPL: Closed Polygon List % Amin: Minimum surface to be interested % Asam: percentage of maximum area ; default a=90%, 0.9 % === OUTPUT RESULTS ====== % iCPL: inverse polygon % A: VL and FL of the open surface % % EXAMPLE: % CPLfillin(CPLsample(14)); % CPLfillin(CPLsample(19)); % CPLfillin(CPLsample(21)); % % See also: CPLconvexhull, CPLconvexhulldelaunay, delaunayofCPL, % CPLharbour, CPLfillinside, CPLfillgap % % % Copyright 2017-2020 Tim C. Lueth |
findchangerow(c)- returns in a list of succeding rows, when the row is different to its predecessor |
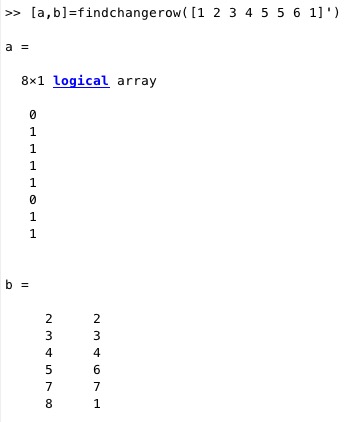 | % findchangerow(c) - returns in a list of succeding rows, when the row is different to its predecessor % (by Tim Lueth, VLFL-Lib, 2017-JUL-24 as class: AUXILIARY PROCEDURES) % % creates a change index list from any row list (Status of: 2017-07-24) % % Introduced first in SolidGeometry 4.0 % % See also: mod1 % % [i,CIL]=findchangerow(c) % === INPUT PARAMETERS === % c: list of succeeding rows % === OUTPUT RESULTS ====== % i: index list % CIL: Change index list % % EXAMPLE: % [a,b]=findchangerow([1 2 3 4 5 5 6 1]') % % See also: mod1 % % % Copyright 2017 Tim C. Lueth |
CPLofSGsliceprojection(SG,z,l,t)- returns a slice produced by an orthographic matlab figure |
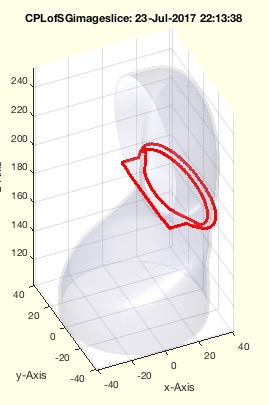 | % CPLofSGsliceprojection(SG,z,l,t) - returns a slice produced by an orthographic matlab figure % (by Tim Lueth, VLFL-Lib, 2017-JUL-23 as class: CLOSED POLYGON LISTS) % % ======================================================================= % OBSOLETE (2020-08-29) - USE 'CPLofSGslice' INSTEAD % ======================================================================= % % This fnctn is neither faster nor more accurate than CPLofSGslice. It is % just an unnecessary implementation to learn. TRY TO AVOID % This fnctn has a limited resolution since it uses the pixel resolution % of the screen. % (Status of: 2020-08-29) % % Introduced first in SolidGeometry 4.0 % % See also: [ CPLofSGslice ] ; CPLofSGslice, CPLofSGslice2, CPLofSGslice3 % % [CPL,n,res]=CPLofSGsliceprojection([SG,z,l,t]) % === INPUT PARAMETERS === % SG: Solid Geometry % z: slice z value % l: limitation to inout level; default is no limitations ([]) % t: slice thickness % === OUTPUT RESULTS ====== % CPL: CPL of a specified level % n: number of contours % res: resolution of the image % % See also: [ CPLofSGslice ] ; CPLofSGslice, CPLofSGslice2, CPLofSGslice3 % % % Copyright 2017-2020 Tim C. Lueth |
CVLremovez(CVL,z)- removes contours with a defined z value from a CVL |
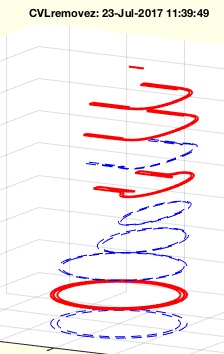 | % CVLremovez(CVL,z) - removes contours with a defined z value from a CVL % (by Tim Lueth, VLFL-Lib, 2017-JUL-23 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.0 % % See also: CVLseparatez, CVLzreplace, CVLzseparate % % XVL=CVLremovez(CVL,z) % === INPUT PARAMETERS === % CVL: Contour vertex list % z: list of z values to remove % === OUTPUT RESULTS ====== % XVL: New Contour vertex list % % EXAMPLE: % load JACO_robot.mat; CVL=CVLofSGslices(JC0,10); % z=CVLseparatez(CVL) % CVLremovez(CVL,z([1 3 4 5 7])) % % See also: CVLseparatez, CVLzreplace, CVLzseparate % % % Copyright 2017-2020 Tim C. Lueth |
isintegerbv(x)- returns whether a number is an integer by value not by type |
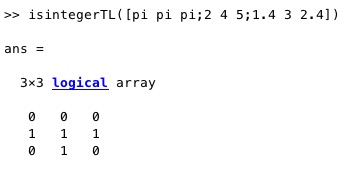 | % isintegerbv(x) - returns whether a number is an integer by value not by type % (by Tim Lueth, VLFL-Lib, 2017-JUL-20 as class: AUXILIARY PROCEDURES) % % mod(x,1)==0 % % (Status of: 2018-08-20) % % Introduced first in SolidGeometry 4.0 % % See also: isinteger, int32orfloat % % l=isintegerbv(x) % === INPUT PARAMETERS === % x: scalar, array or vector % === OUTPUT RESULTS ====== % l: logical value,array or vector % % EXAMPLE: % isintegerTL([pi pi pi;2 4 5;1.4 3 2.4]) % % See also: isinteger, int32orfloat % % % Copyright 2017-2020 Tim C. Lueth |
meshgridofBB(SG,nx,ny,nz,thr)- returns a meshgrid for the coordinates of a solid |
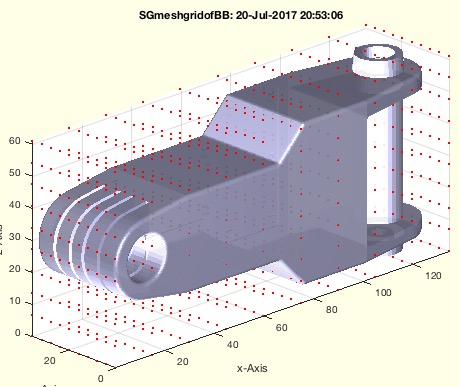 | % meshgridofBB(SG,nx,ny,nz,thr) - returns a meshgrid for the coordinates of a solid % (by Tim Lueth, VLFL-Lib, 2017-JUL-20 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: VLmeshgrid % % [X,Y,Z,VL,xx,yy,zz]=meshgridofBB(SG,[nx,ny,nz,thr]) % === INPUT PARAMETERS === % SG: Solid geometry % nx: number of steps in x-direction % ny: number of steps in y-direction % nz: number of steps in z-direction % thr: elongation before and after; default is 0 % === OUTPUT RESULTS ====== % X: X-Values of Meshgrid % Y: Y-Values of Meshgrid % Z: Z-Values of Meshgrid % VL: Vertex List of the meshgrid % xx: steps in x-direction % yy: steps in y-direction % zz: steps in z-direction % % EXAMPLE: % SG=SGreadSTL(which('ForearmLink.stl')) % [X,Y,Z]=meshgridofBB(SG,10,10,10) % % [~,~,~,VL]=meshgridofBB(SG,20,20,20); SGisInterior(SG,VL); % % See also: VLmeshgrid % % % Copyright 2017 Tim C. Lueth |
pdeplotfaces(model)- simply plots the surfaces to select |
 | % pdeplotfaces(model) - simply plots the surfaces to select % (by Tim Lueth, VLFL-Lib, 2017-JUL-20 as class: FEM/PDE) % % Introduced first in SolidGeometry 4.0 % % See also: pdemodelofSG % % pdeplotfaces(model) % === INPUT PARAMETERS === % model: pde model % % EXAMPLE: % % model=pdemodelofSG(SG); % pdeplotfaces(model); % % See also: pdemodelofSG % % % Copyright 2017 Tim C. Lueth |
pdeplotresult(model,result)- plots the displacement in 3 quadrants |
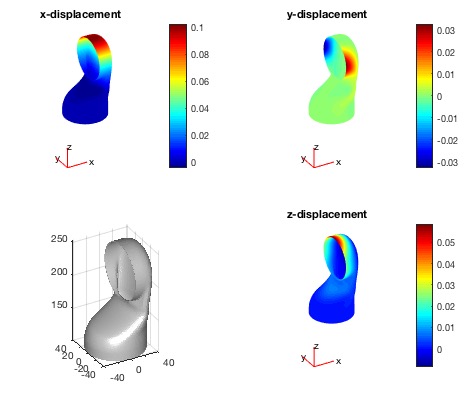 | % pdeplotresult(model,result) - plots the displacement in 3 quadrants % (by Tim Lueth, VLFL-Lib, 2017-JUL-20 as class: FEM/PDE) % % This fnctn is a plotting fnctn for showing the displacement results % under load (Status of: 2018-02-28) % % Introduced first in SolidGeometry 4.0 % % See also: pdemodelofSG, pdeplotfaces, pdesolvesurfaceload, % pdestressstatic % % hf=pdeplotresult(model,result) % === INPUT PARAMETERS === % model: pde model created by pdemodelofSG % result: pde result created by pdesolvesurfaceload % === OUTPUT RESULTS ====== % hf: handle to figure % % EXAMPLE: Displacement of a robot link % load JACO_robot.mat % SG=SGseparate(JC1,6) % model=pdemodelofSG(SG) % pdesolvesurfaceload(model,1,2,[1 0 0]*1e4) % % See also: pdemodelofSG, pdeplotfaces, pdesolvesurfaceload, % pdestressstatic % % % Copyright 2017-2018 Tim C. Lueth |
pdesolvesurfaceload(model,fixfacet,loadfacet,loadvec)- calculates the FEM analysis using pde for a pde mesh model |
 | % pdesolvesurfaceload(model,fixfacet,loadfacet,loadvec) - calculates the FEM analysis using pde for a pde mesh model % (by Tim Lueth, VLFL-Lib, 2017-JUL-19 as class: FEM/PDE) % % search also at matlab central for % von-mises-effective-stress-and-displacements !!! (Status of: 2018-02-28) % % Introduced first in SolidGeometry 4.0 % % See also: pdemodelofSG, pdeplotfaces, pdeplotresult, pdestressstatic % % % [result,model]=pdesolvesurfaceload(model,[fixfacet,loadfacet,loadvec]) % === INPUT PARAMETERS === % model: pdemodel created by pdemodelofSG % fixfacet: list of facet that are fixed % loadfacet: list of faces that are loaded % loadvec: direction of load % === PROPERTY NAMES ===== % 'FixedFaceIndices' : list of facet that are fixed % 'LoadFaceIndices' : list of faces that are loaded % 'Load' : direction of load % === OUTPUT RESULTS ====== % result: simulation result % model: simulated model; called by reference! % % EXAMPLE: Displacement of a bracket with hole % A=SGreadSTL(which('BracketWithHole.stl'),1000) % SGfigure; FSplot(A), view(30,30) % model=pdemodelofSG(A) % pdesolvesurfaceload(model,3,9,1e3) % % pdesolvesurfaceload(model,' FixedFaceIndices',3,' LoadFaceIndices',9,' % Load',1e3) % % See also: pdemodelofSG, pdeplotfaces, pdeplotresult, pdestressstatic % % % % Copyright 2017-2018 Tim C. Lueth |
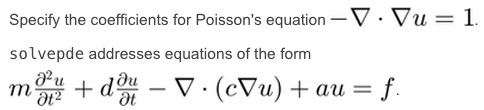
pdemodelofSG(SG,h,e)- creates a pde model from a solid geometry |
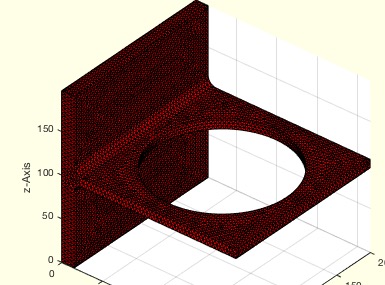 | % pdemodelofSG(SG,h,e) - creates a pde model from a solid geometry % (by Tim Lueth, VLFL-Lib, 2017-JUL-19 as class: FEM/PDE) % % This fnctn creates a pde model from a given solid. The pde models are % typically loaded from a STL File similar to Simccape Multibody. % Therefor this fnctn writes a temp solid and reads it afterwards. % % A pde model consists of a tetrahedral cross-linking (there are several % possibilities for the fnctn generateMesh), while one, two or % three-dimensional propagation of effects can be specified (line % problems, surface deformation, volume deformation) The standard FEM % equation will be specified. For these effects, the equilibrium % condition formula can be selected or the parameters for the standard % FEM equation specified. Subsequently, surfaces / introduction points % with state specifications are given and surfaces / initiation point are % given the effects of the action. % % ATTENTION: models are objects and modified by MATLAB fnctn with calls % by reference! It means the models are modified by a call even the % models are not an output parameter! The repeated call of % applyBoundaryCondition(model, .... % will add at each time conditions to the model even if the conditions % are all the same! % % *MOTIVATION FOR THE PDE fnctns IN SG-LIB* The Partial Diffential % Equation Toolbox (pde) contains some features that are helpful for the % basic processing of solids. However, some of this feature does not have % direct access, such as patching. Since the user can only access the % faces assignment via a graphical representation, the SG-Lib has to % implement a similar faces seperation. The same applies to the % production of the mesh tesselation. (Status of: 2018-02-28) % % Introduced first in SolidGeometry 4.0 % % See also: pdemodelofSG, SGtetramesh, pdeplotfaces, pdesolvesurfaceload, % pdeplotresult, pdestressstatic % % [model,SG]=pdemodelofSG(SG,[h,e]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % h: Hmax parameter for generateMesh % % e: e modulus default is 3000Pa = 3e9 % === OUTPUT RESULTS ====== % model: pde model for pde tool % SG: % % EXAMPLE: Deforming a Bracket: % A=SGreadSTL(which('BracketWithHole.stl'),1000) % model=pdemodelofSG(A) % pdeplot3D(model) % % A=SGsample(27) % model=pdemodelofSG(A) % SGfigure; pdeplot3D(model) % % See also: pdemodelofSG, SGtetramesh, pdeplotfaces, pdesolvesurfaceload, % pdeplotresult, pdestressstatic % % % Copyright 2017-2018 Tim C. Lueth |
SGtetramesh(SG,h)- creates a tetramesh of a Solid Geometry |
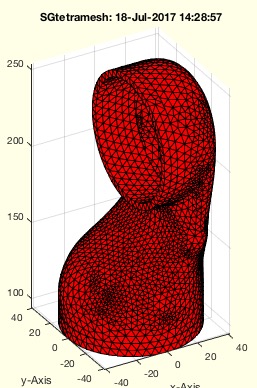 | % SGtetramesh(SG,h) - creates a tetramesh of a Solid Geometry % (by Tim Lueth, VLFL-Lib, 2017-JUL-18 as class: FEM/PDE) % % USE SGshortopti before to remove oben boundaries and non manifold % vertices % This fnctn uses the importGeometry and generateMesh fnctns of the % PDE-Toolbox to create a mesh of the solid an creates a triangualatin % from this data. % ATTENTION: SGtetramesh WILL NOT MELT SEPERATED SOLIDS, They are still % independent surfaces % In contrast to the normal PDE mesh, the linear mode is used here to % create the 4-facet meshes directly % % If SGtetramesh fails with error: "The input mesh is invalid" => % SGcheckmeshlab % If SGtetramesh fails with error: "Meshing failed with a Hmax of" => % Self intrusion! (Status of: 2022-05-23) % % Introduced first in SolidGeometry 4.0 % % See also: pdemodelofSG, SGaddfacetcenterpoints % % [SGn,VL,FL,TR]=SGtetramesh(SG,[h]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % h: maximum mesh length; default is sofBB/20 % === OUTPUT RESULTS ====== % SGn: Solid Geoemtry based on a PDE mesh % VL: Vertex list % FL: Facet list % TR: Tetrahedron triangulation % % EXAMPLE: % SGtetramesh(SGsample(17)) % SGtetramesh(SGsample(17),3) % SGtetramesh(SGsample(35)) % failes because of non manifold % SGtetramesh(SGsample(36)) % failes because of self intrusion % % See also: pdemodelofSG, SGaddfacetcenterpoints % % % Copyright 2017-2022 Tim C. Lueth |
exp_2017_07_18 (CVLz)- EXPERIMENT for automatic generation of packaging for filling from above |
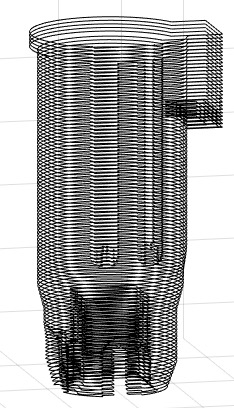 | % exp_2017_07_18 (CVLz) - EXPERIMENT for automatic generation of packaging for filling from above % (by Tim Lueth, VLFL-Lib, 2017-JUL-18 as class: EXPERIMENTS) % % Automatic generation of packaging for filling from above (z-axis) % (Status of: 2017-07-20) % % Introduced first in SolidGeometry 4.0 % % exp_2017_07_18(CVLz) % === INPUT PARAMETERS === % CVLz: % % % Copyright 2017 Tim C. Lueth |
CVLofVL(CVL)- converts a CVL in a CVL whose contours are closed |
 | % CVLofVL(CVL) - converts a CVL in a CVL whose contours are closed % (by Tim Lueth, VLFL-Lib, 2017-JUL-18 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.0 % % See also: CPLofPL % % CVL=CVLofVL(CVL) % === INPUT PARAMETERS === % CVL: CVL with potential open contours % === OUTPUT RESULTS ====== % CVL: CVL with ensured closed contours % % EXAMPLE: % CVLofVL(VLsample(14)) % % See also: CPLofPL % % % Copyright 2017 Tim C. Lueth |
SGhollowsolid(SG,wthk,dist)- returns a copy of the solid with thin walls at an optional distance |
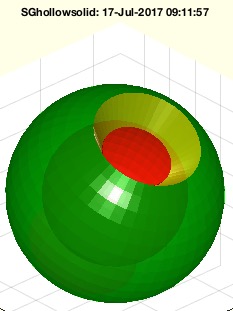 | % SGhollowsolid(SG,wthk,dist) - returns a copy of the solid with thin walls at an optional distance % (by Tim Lueth, VLFL-Lib, 2017-JUL-16 as class: SURFACES) % % SGhollowsolid(SG,-1),0) % creates a copy of the solid with wall thickness of 1; % SGhollowsolid(SG,+2),1) % creates a shell around with wall thickness of d and slot size 1; % % % *Hollow structures from closed solid surface models:* For all closed % surfaces it is easy: Create a grown/shrinked copy of the solid with a % defined wall thickness. For grown copies (shells), invert afterwards % the inner/original faces of the solid. for shrinked copies (hollow % solid walls), invert afterwards the inner/shrinked faces of the copy. % Both surfaces together are the final hollow solid. % ATTENTION: For a closed surface for most of the 3D printing processes % it makes no sense to convert solids into shell structures since the % material in the shells is not removable. There is no weight advantage! % The vertices are sorted: VL=[ORG;COPY]; The facets are sorted % FL=[ORG;COPY] % % *Solid structures from open free form surfaces:* In case of open % surfaces that do not represent a solid, this fnctn will create also % create a shrinked or grown copy and calculates in addition the facets % that link the corresponding walls. % The vertices are sorted: VL=[ORG;COPY]; The facets are sorted % FL=[ORG;COPY,WALL] % % *PRINCIPLE* Since the normal vector of all vertices is known, the grow % procedure will move this vertices along the normal vector. For an % isolated surface the normal vector can also be calculated, but in case % of features edges or features surfaces, the normal vector of the edge % contour cannot be calculated isolated from other attached surfaces. % % *ERROR CONDITIONS* In case that a isolated surface is processed, the % grow fnctn will not work as expected. This fnctn is for processing % connected surfaces of a closed solid only % (Status of: 2018-08-30) % % Introduced first in SolidGeometry 4.0 % % See also: isplanarVLFL(VL, FL), VLFLsample, vertexNormalTL % % NSG=SGhollowsolid([SG,wthk,dist]) % === INPUT PARAMETERS === % SG: Solid Geometry % wthk: Wall thickness % dist: distance between original and new solid % === OUTPUT RESULTS ====== % NSG: Copy with thin walls % % EXAMPLE: % A=SGsample(41); SGpuzzlecut3D(SGhollowsolid(A,0.7,.3));B=ans; SGplot(A,'w'); % % [SG,FLW]=SGsphere(10,'',pi/3,-pi/3); SG.FL=FLW; % SG=SGtransR(SG,rot(pi/6,0,0)); SGfigure(SG); view(-30,30); VL=SG.VL; FL=SG.FL; % % [SG]=SGsphere(10,'',pi/3,-pi/3); % SGhollowsolid(SG,5) % % [VL,FL,SG]=VLFLsample(3); SGhollowsolid(SG,5) % % See also: isplanarVLFL(VL, FL), VLFLsample, vertexNormalTL % % % Copyright 2017-2018 Tim C. Lueth |
VLFLofCPL(CPL)- returns the vertex and facet list from a closed contour list |
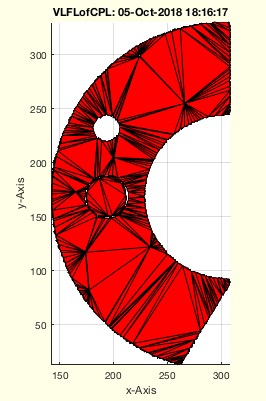 | % VLFLofCPL(CPL) - returns the vertex and facet list from a closed contour list % (by Tim Lueth, VLFL-Lib, 2017-JUL-16 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: VLFLofCPLz, VLFLofCPLrot % % [VL,FL]=VLFLofCPL(CPL) % === INPUT PARAMETERS === % CPL: CPL % === OUTPUT RESULTS ====== % VL: Vertex list % FL: Facet list % % EXAMPLE: % pc=PCofSG(SGsample(25),30000); % SGfigure; VLplot(pc.Location,'r*',2); % axis(axis*1.1); axis off; CPL=CPLofimage(getframe(gca)); VLFLofCPL(CPL); view(0,90) % % See also: VLFLofCPLz, VLFLofCPLrot % % % Copyright 2017-2018 Tim C. Lueth |
VLFLsample(Nr,T)- returns OPEN surfaces as samples for procedure testing |
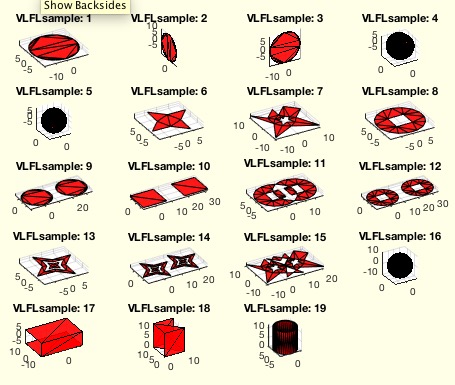 | % VLFLsample(Nr,T) - returns OPEN surfaces as samples for procedure testing % (by Tim Lueth, VLFL-Lib, 2017-JUL-16 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: CPLoftext, CPLsample, SGsample, VLsample, PLsample, % CSGsample, SGerrorsample, SGfischertechniksample, SGcmdsample, % testfunctTL, permutevector, VLsampletriangles, CVLzsample % % [VL,FL,SG,CVL]=VLFLsample([Nr,T]) % === INPUT PARAMETERS === % Nr: Number of sample % T: Optional spatian transformation % === OUTPUT RESULTS ====== % VL: Vertex List % FL: Facet List % SG: Solid SG.VL,SG.FL % CVL: Open Edge contour % % EXAMPLE: % VLFLsample(13) % VLFLsample(13,TofR(rot(pi/6,pi/6,0),[0 0 10])) % [~,~,~,CVL]=VLFLsample(13); SGfigure; CVLplot(CVL,'-',2); view(-30,30) % % See also: CPLoftext, CPLsample, SGsample, VLsample, PLsample, % CSGsample, SGerrorsample, SGfischertechniksample, SGcmdsample, % testfunctTL, permutevector, VLsampletriangles, CVLzsample % % % Copyright 2017-2021 Tim C. Lueth |
SGnegativeform(SG,w)- creates from a solid a negative form with specific features |
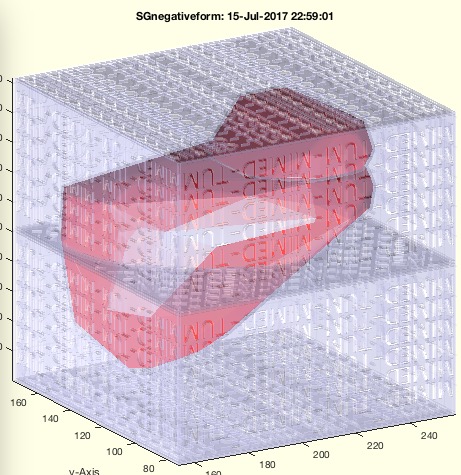 | % SGnegativeform(SG,w) - creates from a solid a negative form with specific features % (by Tim Lueth, VLFL-Lib, 2017-JUL-15 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: SGconvexHull % % SG=SGnegativeform(SG,[w]) % === INPUT PARAMETERS === % SG: Solid Geometry % w: wall distance % === PROPERTY NAMES ===== % 'Faces' : reduces the number of facets % 'turn' : if 'turn' is used, the axis are changed % 'convex' : if 'convex' is used, the convex hull is calculated % 'Type' : 'box' or 'shell' is supported; default is box % 'Cut' : cutting planes; default is uncut, i.e. [1 1 1] % 'hollowcontour' : % 'hollow' : % === OUTPUT RESULTS ====== % SG: A simple negative for or several parts of a form % % See also: SGconvexHull % % % Copyright 2017 Tim C. Lueth |
exp_2017_07_14- EXPERIMENT for creating a negative Form of a solid and perforate the shell |
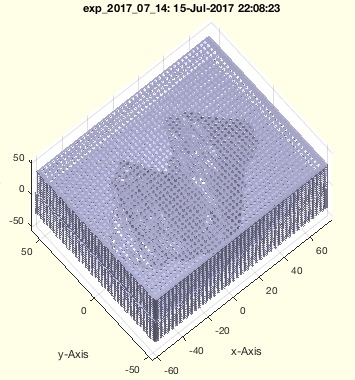 | % exp_2017_07_14 - EXPERIMENT for creating a negative Form of a solid and perforate the shell % (by Tim Lueth, VLFL-Lib, 2017-JUL-14 as class: SURFACES) % % Tutorial to show the power of SG-Lib for medical data. Discussed with % Franz Irlinger and Dominik Rumschoettel (Status of: 2017-07-14) % % Introduced first in SolidGeometry 4.0 % % See also: SGnegativeform % % exp_2017_07_14 % % See also: SGnegativeform % % % Copyright 2017 Tim C. Lueth |
SGTdimensioning(SG,Fr,pnt)- creates a four-quadrant view related to a frame or the center of a solid geometry |
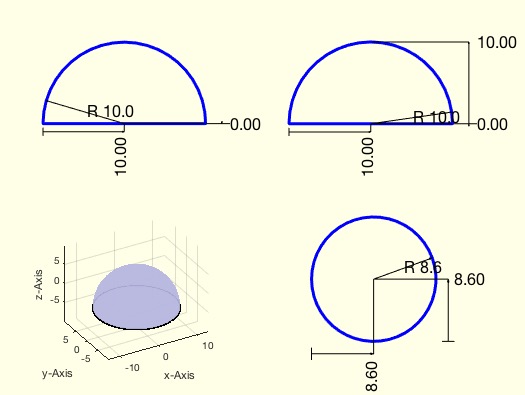 | % SGTdimensioning(SG,Fr,pnt) - creates a four-quadrant view related to a frame or the center of a solid geometry % (by Tim Lueth, VLFL-Lib, 2017-JUL-13 as class: ANALYTICAL GEOMETRY) % % Introduced first in SolidGeometry 4.0 % % See also: viewdimensioning, PLdimensioning, CVLdimclassifier, % SGdimensioning4 % % [CPL1,CPL2,CPL3]=SGTdimensioning(SG,[Fr,pnt]) % === INPUT PARAMETERS === % SG: Solid Geometry % Fr: Frame Name; default is 'B' % pnt: center of view related to Frame % === OUTPUT RESULTS ====== % CPL1: CPL of XY-Plane: subplot(2,2,4) % CPL2: CPL of XZ-Plane: subplot(2,2,2) % CPL3: CPL of YZ-Plane: subplot(2,2,1) % % EXAMPLE: % SGTdimensioning(SGsample(5)) % SGTdimensioning(SGsample(17),'',[10 -0 -10]) % % See also: viewdimensioning, PLdimensioning, CVLdimclassifier, % SGdimensioning4 % % % Copyright 2017-2020 Tim C. Lueth |
ellipseofPL(PL)- returns the parameter for an ellipse of at least 5 points |
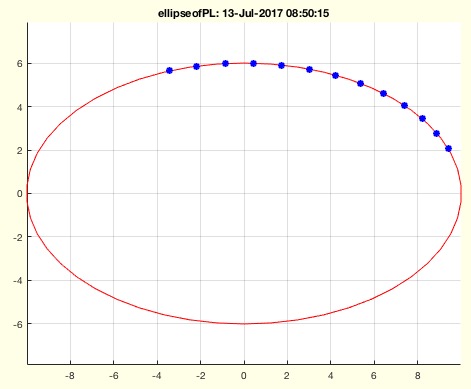 | % ellipseofPL(PL) - returns the parameter for an ellipse of at least 5 points % (by Ohad Gal, VLFL-Lib, 2017-JUL-13 as class: CLOSED POLYGON LISTS) % % Copyright (c) 2003, Ohad Gal % All rights reserved. % % Redistribution and use in source and binary forms, with or without % modification, are permitted provided that the following conditions are % met: % % * Redistributions of source code must retain the above copyright % notice, this list of conditions and the following disclaimer. % * Redistributions in binary form must reproduce the above copyright % notice, this list of conditions and the following disclaimer in the % documentation and/or other materials provided with the distribution % % THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS % IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED % TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A % PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT % OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, % SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT % LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, % DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY % THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT % (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE % OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. % (Status of: 2017-07-13) % % See also: center3P, center4P % % [cp,a,b,ex,ey,phi]=ellipseofPL(PL) % === INPUT PARAMETERS === % PL: Point List % === OUTPUT RESULTS ====== % cp: center % a: long axis % b: short axis % ex: ex vector % ey: ey vector % phi: turning angle % % EXAMPLE: % ellipseofPL(PLcircle(10,'',pi/2,6,pi/9)) % % % See also: center3P, center4P % |
exp_2017_07_13(CPL,n,s,noise);- EXPERIMENT to test ellipseofPL |
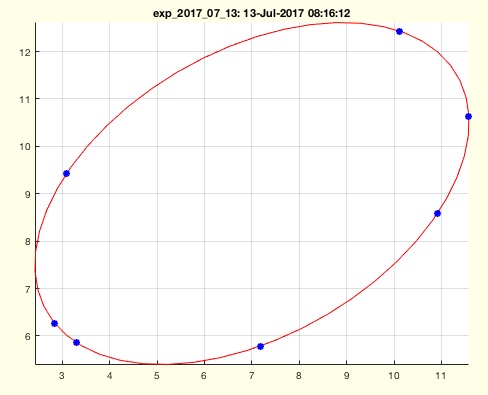 | % exp_2017_07_13(CPL,n,s,noise); - EXPERIMENT to test ellipseofPL % (by Tim Lueth, VLFL-Lib, 2017-JUL-13 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 4.0 % % See also: ellipseofPL % % cp=exp_2017_07_13([CPL,n,s,noise]); % === INPUT PARAMETERS === % CPL: Close Polygon to test % n: number of points used for testing % s: starting index for a succeeding sequence; 0 = random % noise: noise added to the point list coordinates % === OUTPUT RESULTS ====== % cp: % % See also: ellipseofPL % % % Copyright 2017 Tim C. Lueth |
SGdimensioning(SG,ang1,ang2,pnt)- creates a drqwing of the solid including dimensions |
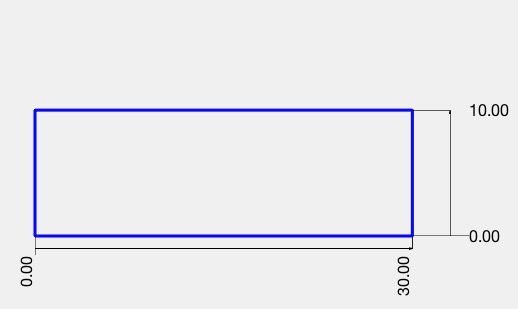 | % SGdimensioning(SG,ang1,ang2,pnt) - creates a drqwing of the solid including dimensions % (by Tim Lueth, VLFL-Lib, 2017-JUL-12 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: SGTdimensioning, viewdimensioning, PLdimensioning, % CVLdimclassifier % % SGdimensioning(SG,[ang1,ang2,pnt]) % === INPUT PARAMETERS === % SG: Solid geometry % ang1: angle 1 similar to view % ang2: angle 2 similar to view % pnt: crossing point % % EXAMPLE: % A=SGbox([30,20,10]) % SGdimensioning(A,0,0) % SGdimensioning(A,0,90) % SGdimensioning(A,90,0) % % See also: SGTdimensioning, viewdimensioning, PLdimensioning, % CVLdimclassifier % % % Copyright 2017 Tim C. Lueth |
CVLofopenfaces(VL,FL,thr)- returns the closed vertex list for all open surfaces |
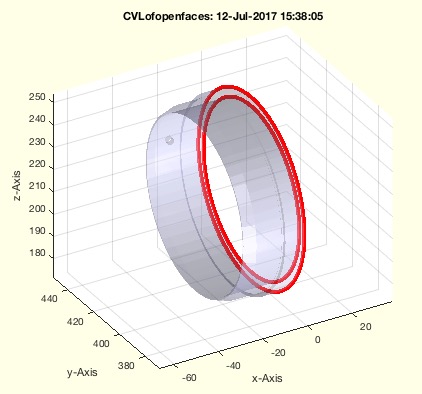 | % CVLofopenfaces(VL,FL,thr) - returns the closed vertex list for all open surfaces % (by Tim Lueth, VLFL-Lib, 2017-JUL-12 as class: SURFACES) % % This fnctn is more or less for testing purposes. The fnctn % VLFLcorrectdoubledvertex is called first, since otherwise it makes no % sense to detect open surfaces (Status of: 2018-08-20) % % Introduced first in SolidGeometry 4.0 % % See also: CVLofSGfreeboundary, VLFLcorrectdoubledvertex % % [CVL,EL,CIL]=CVLofopenfaces(VL,FL,[thr]) % === INPUT PARAMETERS === % VL: Vertex list % FL: Facet list % thr: threshold; default is 1e-3 for VLFLcorrectdoubledvertex % === OUTPUT RESULTS ====== % CVL: Closed Vertex List % EL: Edge List % CIL: Contour Index List for EL % % EXAMPLE: % loadweb JACO_robot.mat; A=SGseparate(JC2,2) % CVLofopenfaces(A.VL,A.FL); % % CVL=CVLofopenfaces(A.VL,A.FL); % CVLdimclassifier(CVL) % % See also: CVLofSGfreeboundary, VLFLcorrectdoubledvertex % % % Copyright 2017-2018 Tim C. Lueth |
VLFLerroropenfaces(VL,FL)- creates an open faces error by adding an existing vertex of a random facet |
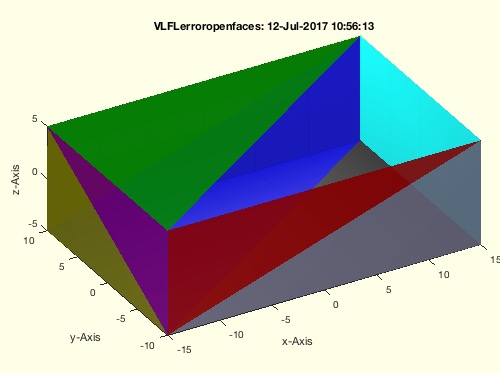 | % VLFLerroropenfaces(VL,FL) - creates an open faces error by adding an existing vertex of a random facet % (by Tim Lueth, VLFL-Lib, 2017-JUL-12 as class: AUXILIARY PROCEDURES) % % This fnctn deletes existing facets/surfaces and adds two degenerated % facets. % if the vertex list contains doubled vertices, the fnctn surfaceofSG is % unable to find the connected surfaces (Status of: 2017-07-12) % % Introduced first in SolidGeometry 4.0 % % See also: VLFLcorrectdoubledvertex, VLFLerrordoubledvertex % % [VL,FL]=VLFLerroropenfaces(VL,FL) % === INPUT PARAMETERS === % VL: Vertex List % FL: Facet List % === OUTPUT RESULTS ====== % VL: Unchanged Vertex List % FL: Facet list with a surface missing % % EXAMPLE: % A=SGbox([30,20,10]); for i=1:4; % [A.VL,A.FL]=VLFLerrordoubledvertex(A.VL,A.FL); end % VLFLerroropenfaces(A.VL,A.FL) % % See also: VLFLcorrectdoubledvertex, VLFLerrordoubledvertex % % % Copyright 2017 Tim C. Lueth |
VLFLcorrectdoubledvertex(VL,FL,thr)- finds and removes doubled vertex entries and shows degenerated facts |
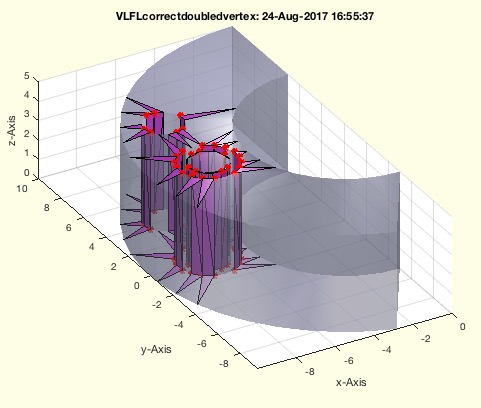 | % VLFLcorrectdoubledvertex(VL,FL,thr) - finds and removes doubled vertex entries and shows degenerated facts % (by Tim Lueth, VLFL-Lib, 2017-JUL-12 as class: AUXILIARY PROCEDURES) % % After removal of doubled vertices, there can be degenerated facets of % type [vi vk vk]. Those degenerated Facet MUST NOT BE REMOVED! (Status % of: 2017-08-24) % % Introduced first in SolidGeometry 4.0 % % See also: VLFLerrordoubledvertex, VLFLerroropenfaces % % [VLN,FLN,n]=VLFLcorrectdoubledvertex(VL,FL,[thr]) % === INPUT PARAMETERS === % VL: Vertex list % FL: Facet list % thr: resolution; default is 1e-12 % === OUTPUT RESULTS ====== % VLN: Shortend certex list with original, not rounded vertex values % FLN: Corrected facet list % n: number of removed vertices % % EXAMPLE: % A=SGbox([30,30,1]); VLFLcorrectdoubledvertex(A.VL,A.FL,2); % A=SGsample(25); VLFLcorrectdoubledvertex(A.VL,A.FL,1); % A=SGbox([30,20,10]) % [B.VL,B.FL]=VLFLerrordoubledvertex(A.VL,A.FL) % [C.VL,C.FL]=VLFLcorrectdoubledvertex(B.VL,B.FL) % % See also: VLFLerrordoubledvertex, VLFLerroropenfaces % % % Copyright 2017 Tim C. Lueth |
VLFLerrordoubledvertex(VL,FL)- creates an doubled vertex error by adding an existing vertex of a random facet |
 | % VLFLerrordoubledvertex(VL,FL) - creates an doubled vertex error by adding an existing vertex of a random facet % (by Tim Lueth, VLFL-Lib, 2017-JUL-12 as class: AUXILIARY PROCEDURES) % % Testing fnctn for development that creates copies of vertices plus a % noise. (Status of: 2017-07-12) % % Introduced first in SolidGeometry 4.0 % % See also: VLFLcorrectdoubledvertex, VLFLerroropenfaces % % [VL,FL]=VLFLerrordoubledvertex(VL,FL) % === INPUT PARAMETERS === % VL: Vertex List % FL: Facet List % === OUTPUT RESULTS ====== % VL: vertex list with an additional/doubled entry % FL: facet list indexing the doubled entry % % EXAMPLE: % A=SGbox([30,20,10]) % [B.VL,B.FL]=VLFLerrordoubledvertex(A.VL,A.FL) % [C.VL,C.FL]=VLFLcorrectdoubledvertex(B.VL,B.FL) % % See also: VLFLcorrectdoubledvertex, VLFLerroropenfaces % % % Copyright 2017 Tim C. Lueth |
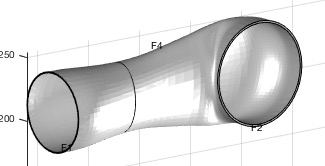
JACOmodel(gl,siz,tck);- creates an STL file for magnified/shrinked jaco link |
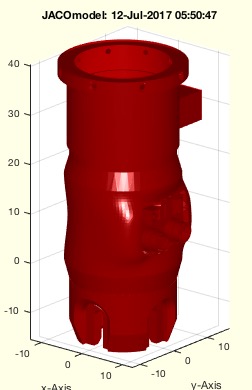 | % JACOmodel(gl,siz,tck); - creates an STL file for magnified/shrinked jaco link % (by Tim Lueth, ROBOT-Lib, 2017-JUL-11 as class: FILE HANDLING) % % This fnctn is to created shrinked versions of the JACO STL's. Since the % STL file contain different closed and even some open surfaces, it is % required to select some of the parts to grow the to a required wall % thickness (Status of: 2017-07-13) % % Introduced first in SolidGeometry 4.0 % % See also: JACOsim, JACOget, JACOset % % SGS=JACOmodel([gl,siz,tck]); % === INPUT PARAMETERS === % gl: robot link number % siz: shinking/magnifiaction size; default is 0.25 % tck: thickness addon; default is 1.0 % === OUTPUT RESULTS ====== % SGS: Final Solid including frames % % EXAMPLE: just type % JACOmodel % % See also: JACOsim, JACOget, JACOset % % % Copyright 2017 Tim C. Lueth |
FSofSG(TR,alpha,sizesort,Amin)- Features surfaces of SG |
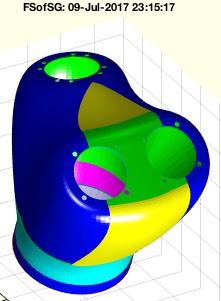 | % FSofSG(TR,alpha,sizesort,Amin) - Features surfaces of SG % (by Tim Lueth, VLFL-Lib, 2017-JUL-09 as class: SURFACES) % % This fnctn can take several seconds to classify all OPEN surfaces of a % solid by using TR3neighborsAngle and neighborsAngleSurface. When called % without output parameter; drawing the surfaces take the most time. % (Status of: 2018-08-20) % % Introduced first in SolidGeometry 4.0 % % See also: surfacesofSG, FSplot % % [CFL,nF,Ai]=FSofSG(TR,[alpha,sizesort,Amin]) % === INPUT PARAMETERS === % TR: Solid Geometry or Triangulation % alpha: maximum angle difference between two facets; default is 1 ~ 60 % degree % sizesort: if true, the surfaces are sorted by their size; default is % false % Amin: Minimum area to be classified as individual surface % === OUTPUT RESULTS ====== % CFL: Index List for the Surface Indices % nF: number of faces per feature surface % Ai: Size of Feature surface % % EXAMPLE: % load JACO_robot.mat % FSofSG(JC3,0.6); % FSofSG(JC3,0.6,true); % % See also: surfacesofSG, FSplot % % % Copyright 2017-2018 Tim C. Lueth |
VLmeshgrid(xx,yy,zz)- simple function for a better understand of meshgrid |
 | % VLmeshgrid(xx,yy,zz) - simple fnctn for a better understand of meshgrid % (by Tim Lueth, VLFL-Lib, 2017-JUL-09 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: CPLofmeshgrid(X, Y), PLmeshgrid % % VL=VLmeshgrid(xx,yy,[zz]) % === INPUT PARAMETERS === % xx: list of x values % yy: list of y values % zz: list of y values; % === OUTPUT RESULTS ====== % VL: Point list of all mesh coordinates % % EXAMPLE: % VLmeshgrid(1:3,1:2,10) % VLmeshgrid([0 15 25 35 45 55 65],0:8:8*22,[10 20]) % % See also: CPLofmeshgrid(X, Y), PLmeshgrid % % % Copyright 2017 Tim C. Lueth |
VLedgeNormal_old(VL,ez)- returns the normal vector to vertex edge list |
 | % VLedgeNormal_old(VL,ez) - returns the normal vector to vertex edge list % (by Tim Lueth, VLFL-Lib, 2017-JUL-09 as class: EDGE LISTS) % % ======================================================================= % OBSOLETE (2017-07-26) - USE FAMILY 'VLedgeNormal' INSTEAD % ======================================================================= % % It does not support nan separted vertex lists (CVL) yet. The normal is % NaN for the first point or the given ez. The normal is NaN for the % lastpoint. The normal is NaN for all straight points. In case of % switching normals; the orientation of the succeeding normal will be % fliped. (Status of: 2017-07-19) % % Introduced first in SolidGeometry 4.0 % % See also: [ VLedgeNormal ] ; VLFLfaceNormal, VLedgeNormal, edgeNormal, % CPLedgeNormal % % [NL,AL]=VLedgeNormal_old(VL,[ez]) % === INPUT PARAMETERS === % VL: Vertex list of succeeding vertices % ez: optional first normal vector; default is normal of facet [1 2 3] % === OUTPUT RESULTS ====== % NL: Normal vector; NaN if A(i)=0; % AL: area vector; if straight, A(i)=0; % % EXAMPLE: % VL=VLsample(12); VL=[VL;VL(1:2,:)]; VLedgeNormal(VL) % VLedgeNormal(PLhelix(10,10,4*pi)) % VLedgeNormal(VLsample(9)) % % % See also: [ VLedgeNormal ] ; VLFLfaceNormal, VLedgeNormal, edgeNormal, % CPLedgeNormal % % % Copyright 2017 Tim C. Lueth |
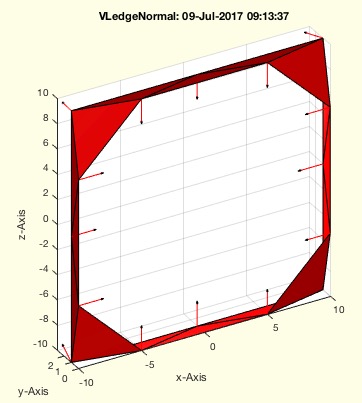
VLedgeNormal(VL,ez)- returs normal and plane vector for free boundary contour |
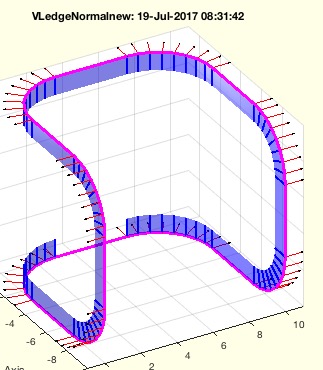 | % VLedgeNormal(VL,ez) - returs normal and plane vector for free boundary contour % (by Tim Lueth, VLFL-Lib, 2017-JUL-09 as class: CLOSED POLYGON LISTS) % % This fnctn is more complex to understand that it seems on the first % view: Three succeeding points [last current next] define a plane if not % in a line. This plane has a normal vector ez. The tangential vector % ex= is [next - last] and the plane vector is ey=cross(ez,ex) % 2018-07-23 Does also support straight lines now. (Status of: 2020-09-14) % % Introduced first in SolidGeometry 4.0 % % See also: CVLedgecenter, CVLedgeNormal, VLFLfaceNormal, % VLFLofCVLdelaunay2D, VLFLofCVLdelaunay3D, edgeNormal, CPLedgeNormal, % Rofez % % [NL,OL]=VLedgeNormal(VL,[ez]) % === INPUT PARAMETERS === % VL: Vertex list of succeeding vertices % ez: optional first normal vector; default is normal of facet [1 2 3] % === OUTPUT RESULTS ====== % NL: Normal Vector List (red) % OL: Orthogonal Plane Directed Vector list (blue) % % EXAMPLE: % VL=VLsample(12); VL=[VL;VL(1:2,:)]; VLedgeNormal(VL) % VLedgeNormal(PLhelix(10,10,4*pi)) % VLedgeNormal(VLsample(9)) % VLedgeNormal(VLsample(2)) % % See also: CVLedgecenter, CVLedgeNormal, VLFLfaceNormal, % VLFLofCVLdelaunay2D, VLFLofCVLdelaunay3D, edgeNormal, CPLedgeNormal, % Rofez % % % Copyright 2017-2020 Tim C. Lueth |
PLmeshgrid(xx,yy)- simple function for a better understand of meshgrid |
 | % PLmeshgrid(xx,yy) - simple fnctn for a better understand of meshgrid % (by Tim Lueth, VLFL-Lib, 2017-JUL-08 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: VLmeshgrid, CPLofmeshgrid(X, Y) % % PL=PLmeshgrid(xx,yy) % === INPUT PARAMETERS === % xx: list of x values % yy: list of y values % === OUTPUT RESULTS ====== % PL: Point list of all mesh coordinates % % EXAMPLE: % PLmeshgrid(1:3,1:2) % PLmeshgrid([0 15 25 35 45 55 65],0:8:8*22) % % See also: VLmeshgrid, CPLofmeshgrid(X, Y) % % % Copyright 2017 Tim C. Lueth |
SGgrowoutsideFS(SG,t)- grows only the outside feature surfaces of a solid |
 | % SGgrowoutsideFS(SG,t) - grows only the outside feature surfaces of a solid % (by Tim Lueth, VLFL-Lib, 2017-JUL-08 as class: SURFACES) % % ATTENTION = NAME CHANGED FROM SGgrowFS TO SGgrowoutsideFS. % USE depuseString('SGgrowFS') to quickly find and change the use code % % The feature surfaces are calculated (default value is 1 rad/60 degree). % Afterwards it is analyzed wich facets show inside of the solid an which % show outside. Only inside or outside are processed here. Use SGgrow for % processing all. At the border between outside and inside, the vertices % that belong to both (inside, outside) stay unchanged. The vertices that % define the border of the new outside surfaces are not moved along the % vertex normal vector but along the normal vector of the border contour! % Attention: Be aware that concave surface cannot be grown without % self-penetration. (Status of: 2020-08-09) % % Introduced first in SolidGeometry 4.0 % % See also: SGgrowoutsideFS, SGgrow, SGmagnifyVL, SGscale2dim, % SGshrinktofit % % SG=SGgrowoutsideFS(SG,[t]) % === INPUT PARAMETERS === % SG: Solid Geometry % t: Increase/Decrease Value along the vertex normal vector % === OUTPUT RESULTS ====== % SG: % % EXAMPLE: % load JACO_robot.mat % use loadweb if the file need to be aquired % SG=SGseparate(JC3,3) % SGgrowoutsideFS(SG,10) % SGgrowoutsideFS(SGboxsphere,-2) % creates self intersection % SGgrowoutsideFS(SGboxsphere,+2) % inside sphere will be unchanged % % % See also: SGgrowoutsideFS, SGgrow, SGmagnifyVL, SGscale2dim, % SGshrinktofit % % % Copyright 2017-2020 Tim C. Lueth |
clipboardrem(maxc)- removes comment characters from the clipboard |
 | % clipboardrem(maxc) - removes comment characters from the clipboard % (by Tim Lueth, FileMaker, 2017-JUL-07 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: textHorizontalBlockAlign, str2codelines, paste2code., % clipboardadd % % C=clipboardrem([maxc]) % === INPUT PARAMETERS === % maxc: % === OUTPUT RESULTS ====== % C: % % See also: textHorizontalBlockAlign, str2codelines, paste2code., % clipboardadd % % % Copyright 2017-2021 Tim C. Lueth |
clipboardadd(maxc)- adds comment characters from the clipboard |
 | % clipboardadd(maxc) - adds comment characters from the clipboard % (by Tim Lueth, VLFL-Lib, 2017-JUL-07 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.0 % % See also: textHorizontalBlockAlign, str2codelines, paste2code., % clipboardrem % % C=clipboardadd([maxc]) % === INPUT PARAMETERS === % maxc: % === OUTPUT RESULTS ====== % C: % % See also: textHorizontalBlockAlign, str2codelines, paste2code., % clipboardrem % % % Copyright 2017-2021 Tim C. Lueth |
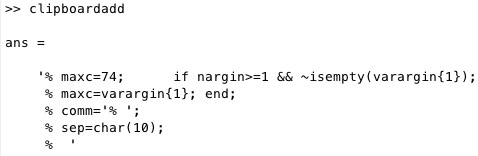
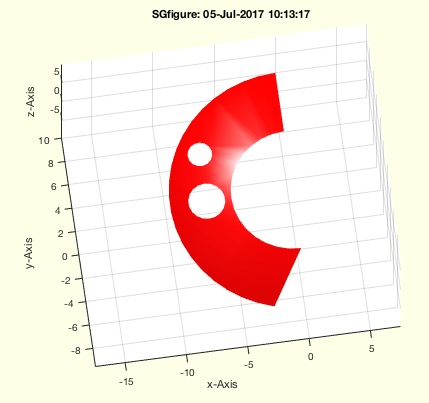
surfacesofSG(TR,alpha)- returns all feature surfaces (open boundaries) that have a limited angle between their normal vectors |
 | % surfacesofSG(TR,alpha) - returns all feature surfaces (open boundaries) that have a limited angle between their normal vectors % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: SURFACES) % % This fnctn can take several seconds to classify all OPEN surfaces of a % solid by using TR3neighborsAngle and neighborsAngleSurface. % When called without output parameter; drawing the surfaces take the % most time. % SGsurfaces returns CLOSED surfaces % TR3mountingfaces is a very similar fnctn % (Status of: 2018-08-21) % % Introduced first in SolidGeometry 4.0 % % See also: FSofSG, neighborsAngleSurface, TR3neighborsAngle, SGsurfaces, % TR3mountingfaces % % [FIL,k,FNL,NAL,NBL,Ai]=surfacesofSG(TR,[alpha]) % === INPUT PARAMETERS === % TR: Solid Geometry or Triangulation % alpha: maximum angle between two facets; default is 1 ~ 60 degree % === OUTPUT RESULTS ====== % FIL: Index List for the Surface Indices % k: maximum value of FIL % FNL: Facet Normal List - TR3neighborsAngle % NAL: Neigbor Angle List - TR3neighborsAngle % NBL: Neigbor List - TR3neighborsAngle % Ai: Area of the indexed surfaces 1:k % % EXAMPLE: % load JACO_robot.mat % surfacesofSG(JC3); % % See also: FSofSG, neighborsAngleSurface, TR3neighborsAngle, SGsurfaces, % TR3mountingfaces % % % Copyright 2017-2018 Tim C. Lueth |
LaserInit- Initializes the USB-Serial Port and Requests Data from the Leuze Scanner |
 | % LaserInit - Initializes the USB-Serial Port and Requests Data from the Leuze Scanner % (by Tim Lueth & Sebastian Heininger, ROBOT-Lib, 2017-JUL-06) % % This is just an example how to use the Leuze Laser Scanner at the mac % computer. (Status of: 2017-07-06) % % Introduced first in SolidGeometry 4.0 % % See also: USBhelp % % LaserInit % % See also: USBhelp % % % Copyright 2017 Tim C. Lueth |
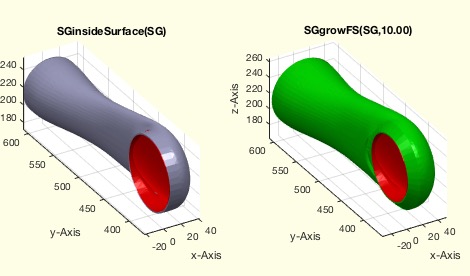
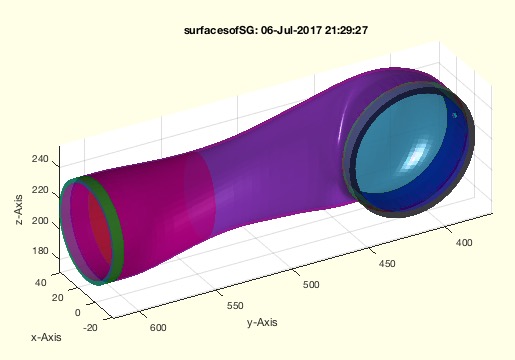
SGinsideSurface(SG,maxtry,wlim,ilim)- Checks the distance between the centers of the facets |
 | % SGinsideSurface(SG,maxtry,wlim,ilim) - Checks the distance between the centers of the facets % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: EXPERIMENTS) % % The fnctns SGcheckfacedist and SGinsidesurface are very similar. Both % ray trace the normal vector of a facet and detect self-penetration of % other facets. While SGcheckfacedist looks backwards, SGinsideSurface % looks forward along the normal vector. The only problem is the extreme % time-consuming quadratic growing effort. % In SGcheckfacedist there is almost never a need to process the original % data. But for SGinsidesurface there is wish to process the original % data. There we use a heuristics to accelerate the algorithm. First we % analyze freeeform surfaces using surfacesofSG, the we analyze just for % each of those surfaces ONE surface to have an opponent. (Status of: % 2020-08-04) % % Introduced first in SolidGeometry 4.0 % % See also: SGcheckfacedist, SGinsidesurface, FLinsideSurfaceofSG % % [FIL,insFS]=SGinsideSurface(SG,[maxtry,wlim,ilim]) % === INPUT PARAMETERS === % SG: Solid Geometry % maxtry: Number of tries to find an opponing facet; default is 10 % wlim: warning limit; default is 0.7 mm % ilim: intended limit; distance that is considered as intended; default % is 0.1mm % === OUTPUT RESULTS ====== % FIL: Facet surface index list % insFS: inside index of feature surface % % EXAMPLE: % load JACO_robot.mat % SG=SGsurfaces(JC3,3) % SGinsideSurface(SG) % % See also: SGcheckfacedist, SGinsidesurface, FLinsideSurfaceofSG % % % Copyright 2017-2020 Tim C. Lueth |
diffangle(NL1,NL2,normfirst)- 3D fnct: calculates the angle between to normal vector lists |
 | % diffangle(NL1,NL2,normfirst) - 3D fnct: calculates the angle between to normal vector lists % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: ANALYTICAL GEOMETRY) % % in contrast to 2D (acos2) there is no sign in 3D % optimal for list processing. if normalization is required, the time is % about doubled (Status of: 2020-12-30) % % Introduced first in SolidGeometry 4.0 % % See also: acos2, TR3neighborsAngle, PLangle, VLangle, PLangle2 % % [AL,DA]=diffangle(NL1,NL2,[normfirst]) % === INPUT PARAMETERS === % NL1: normal vector lists 1 % NL2: normal vector lists 2 % normfirst: if true; VLnorm is sued to norm the vectors first; % === OUTPUT RESULTS ====== % AL: real(acos(dot(NL1(i,:),NL2(i,1)))) % DA: DA=abs(abs(pi/2-AL)-pi/2) % % EXAMPLE: NL1=rand(10,3); NL2=rand(10,3); % % % See also: acos2, TR3neighborsAngle, PLangle, VLangle, PLangle2 % % % Copyright 2017-2020 Tim C. Lueth |
SGcheckfacedist(SG,fnum,wlim,ilim)- Checks the distance between the centers of the facets |
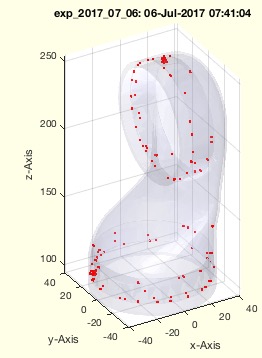 | % SGcheckfacedist(SG,fnum,wlim,ilim) - Checks the distance between the centers of the facets % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: EXPERIMENTS) % % Important test procedure for shrinked models and imported geometries. % Attention: Some geometries consist of intended overlapping structures % Attention: Some geometries consist of open surfaces (Status of: % 2020-08-04) % % Introduced first in SolidGeometry 4.0 % % See also: exp_2017_07_06, SGinsidesurface, FLinsideSurfaceofSG % % [ml,cpl]=SGcheckfacedist(SG,[fnum,wlim,ilim]) % === INPUT PARAMETERS === % SG: Solid Geometry % fnum: reduce to face numbers; default is 3000; % wlim: warning limit; default is 0.7 mm % ilim: intended limit; distance that is considered as intended; default % is 0.1mm % === OUTPUT RESULTS ====== % ml: complete list of distances % cpl: complete list of cross points % % EXAMPLE: % load JACO_robot.mat % X=SGseparate(JC2,5) % SGcheckfacedist(X,2000) % % See also: exp_2017_07_06, SGinsidesurface, FLinsideSurfaceofSG % % % Copyright 2017-2020 Tim C. Lueth |
VLFLofSGT(SGN,N)- returns the VL and FL of the surface related to a fram |
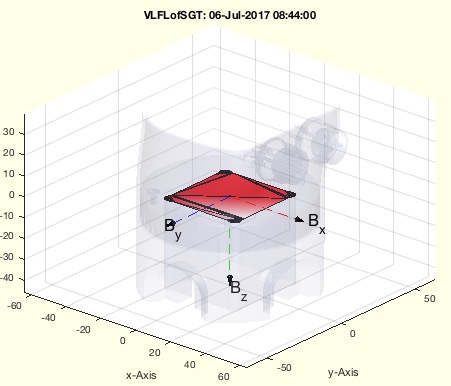 | % VLFLofSGT(SGN,N) - returns the VL and FL of the surface related to a fram % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: CVLofVLFL % % [VL,FL]=VLFLofSGT(SGN,N) % === INPUT PARAMETERS === % SGN: Solid with Frames % N: Name of Frames % === OUTPUT RESULTS ====== % VL: Vertex list; shortend % FL: FAcet list; shortend % % EXAMPLE: % loadweb JACO_robot.mat % VLFLofSGT(JC0,'B'); % % See also: CVLofVLFL % % % Copyright 2017 Tim C. Lueth |
CVLofVLFL()- does the same as CVLfreeBoundaryVLFL |
 | % CVLofVLFL() - does the same as CVLfreeBoundaryVLFL % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: SURFACES) % % ======================================================================= % OBSOLETE (2017-07-26) - USE FAMILY 'CVLfreeBoundaryVLFL' INSTEAD % ======================================================================= % % Introduced first in SolidGeometry 4.0 % % See also: [ CVLfreeBoundaryVLFL ] ; VLFLofSGT, CVLfreeBoundaryVLFL % % [CVL,TR]=CVLofVLFL([]) % === OUTPUT RESULTS ====== % CVL: % TR: % % See also: [ CVLfreeBoundaryVLFL ] ; VLFLofSGT, CVLfreeBoundaryVLFL % % % Copyright 2017 Tim C. Lueth |
CVLofSGT(SGN,N)- returns the CVL of the surface that belongs to a Frame |
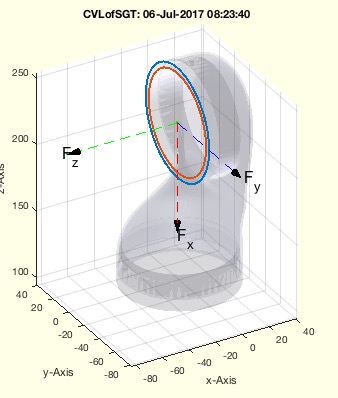 | % CVLofSGT(SGN,N) - returns the CVL of the surface that belongs to a Frame % (by Tim Lueth, VLFL-Lib, 2017-JUL-06 as class: SURFACES) % % currently required that the affiliated surfaces are defined already and % linked to the frame name. This fnctn calles CVLofSGTFS if required % CVLofSGT -requires SG.TFil of T (SG.TFil <== TR3mountingfaces, SGTui) % CVLofSGfi -requires only fi % CVLofSGTFS-requires only T - detects drilled surf not bore hole surf % % (Status of: 2021-03-21) % % Introduced first in SolidGeometry 4.0 % % See also: VLFLofSGT, CVLofSGcutT, CVLofSGcutplanes, SGTui, % TR3mountingfaces, CVLofSGfi, CVLofSGTFS % % [CVL,CPL]=CVLofSGT(SGN,N) % === INPUT PARAMETERS === % SGN: Solid Geometry with Frames % N: Frame name or Transfomraton Matrx [4x4] % === OUTPUT RESULTS ====== % CVL: Convtour Vertex List % CPL: Closed contour wrt Frame N; [n x 3]; z should be 0 % % EXAMPLE: % loadweb JACO_robot.mat % CVLofSGT(JC1,'F'); % CVLofSGT(JC1,TofP([0 0 150])); % % See also: VLFLofSGT, CVLofSGcutT, CVLofSGcutplanes, SGTui, % TR3mountingfaces, CVLofSGfi, CVLofSGTFS % % % Copyright 2017-2021 Tim C. Lueth |
SGofsmbFullModelSimulation(SGi,Ti,tm,t)- returns a solid geometry for an arbitrary time value of a simulation |
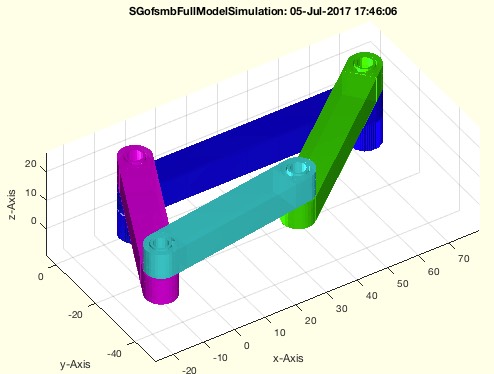 | % SGofsmbFullModelSimulation(SGi,Ti,tm,t) - returns a solid geometry for an arbitrary time value of a simulation % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: SIMMECHANICS INTERFACE) % % This fnctn is an add on to smbFullModelSimulation (Status of: % 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % See also: smbFullModelSimulation % % [SG,t]=SGofsmbFullModelSimulation(SGi,Ti,tm,t) % === INPUT PARAMETERS === % SGi: List of Solid Geometries, result of smbFullModelSimulation % Ti: List of HT Frames, result of smbFullModelSimulation % tm: List of time points result of smbFullModelSimulation % t: desired time % === OUTPUT RESULTS ====== % SG: Solid Geoemtry % t: Exact time of simulation % % EXAMPLE: % [~,BNi,SGi,Ti,tm]=smbFullModelSimulation(1); % SGofsmbFullModelSimulation(SGi,Ti,tm,0); % % See also: smbFullModelSimulation % % % Copyright 2017 Tim C. Lueth |
SGgrabcad(page)- Simply opens the WWW-page of grabcad.com in the system browser |
 | % SGgrabcad(page) - Simply opens the WWW-page of grabcad.com in the system browser % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: AUXILIARY PROCEDURES) % % To save the path of a file permanently for a download, Safari must be % set in developer mode to % 1. click on the document, it appears on the screen (download top right) % 2. the information window is opened (alt-cmd I) % 3. then start the timeline recording (alt-cmd-shift T) % 4. then press the download button % 5. then stop the timeline recording (alt-cmd-shift T) % 6. the link can be copied in the Network requests bar % % Use "CAD Exchanger" to convert IGES to STEP to STL % (Status of: 2018-10-30) % % Introduced first in SolidGeometry 4.0 % % See also: SG_DBconnectors.mat, SG_Patientknee.mat, DeepL % % SGgrabcad([page]) % === INPUT PARAMETERS === % page: key words such as 'hebi' or search terms such as 'umbrella STL' % % EXAMPLE: % SGgrabcad % SGgrabcad('hebi') % Searches for Hebi Modules % SGgrabcad('servo STL') % Searches for STL Files of Servo % % See also: SG_DBconnectors.mat, SG_Patientknee.mat, DeepL % % % Copyright 2017-2018 Tim C. Lueth |
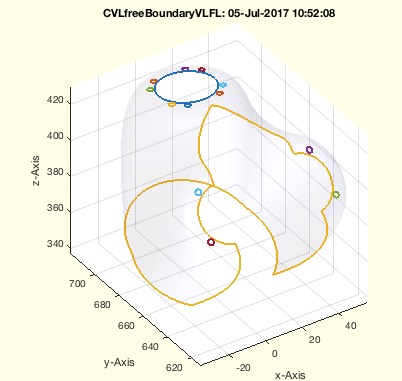
CVLfreeBoundaryVLFL(VL,FL)- returns the CVL of the free boundary |
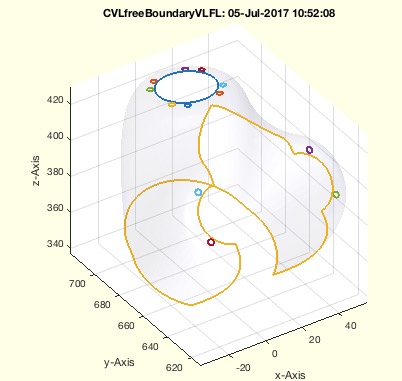 | % CVLfreeBoundaryVLFL(VL,FL) - returns the CVL of the free boundary % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: SURFACES) % % Introduced first in SolidGeometry 4.0 % % See also: freeBoundary, neighborsAngleSurface % % [CVL,TR2]=CVLfreeBoundaryVLFL(VL,FL) % === INPUT PARAMETERS === % VL: Vertex List, or Solid Geometry, or triangulation % FL: Facet list, if VL is Vertex list % === OUTPUT RESULTS ====== % CVL: Closed vertex contour list % TR2: triangulation % % EXAMPLE: % loadweb JACO_robot.mat % SG=JC61; [NAL,NBL]=TR3neighborsAngle(SG); % fi=neighborsAngleSurface(NAL,NBL,1,22000); % CVL=CVLfreeBoundaryVLFL(SG.VL,SG.FL(fi,:)); SGfigure; % CVLplot(CVL,'--'); % CV=separateNaN(CVL,10); CVLplot(CV,'-',3); % % See also: freeBoundary, neighborsAngleSurface % % % Copyright 2017 Tim C. Lueth |
ELunique(ELo,remeq)- returns a unique list of all edges |
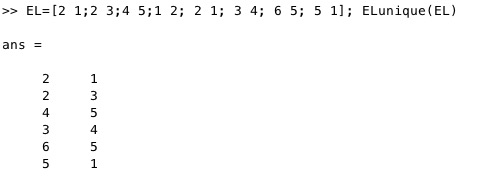 | % ELunique(ELo,remeq) - returns a unique list of all edges % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: EDGE LISTS) % % Makes sure that no edge is used twice! % More or less the same as ELuniqueofFL but will not change the ordner % and in case of doubles the direction of the first used edges is not % changed. (Status of: 2017-08-17) % % Introduced first in SolidGeometry 4.0 % % See also: ELuniqueofFL, FLunique % % EL=ELunique(ELo,[remeq]) % === INPUT PARAMETERS === % ELo: Edge List or Facet List % remeq: removes degenerated edges [i i]; default is false; % === OUTPUT RESULTS ====== % EL: Edge list sorted by first vertex index % % EXAMPLE: % EL=[2 1;2 3;4 5;1 2; 2 1; 3 4; 6 5; 5 1]; ELunique(EL) % ELunique([4 4;4 5; 5 4; 6 4],true) % % See also: ELuniqueofFL, FLunique % % % Copyright 2017 Tim C. Lueth |
graphofEL(EL,n)- creates an undirected graph model from an edge list |
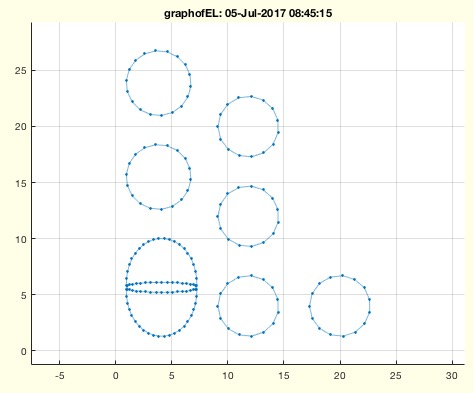 | % graphofEL(EL,n) - creates an undirected graph model from an edge list % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: EDGE LISTS) % % This is the first fnctn to analyze surface models using graph theory. % It is extremely helpful to analyze the structures by this abstraction % level. % MATLAB supports since 2015b % undirected "graphs" and % directed "digraphs" (Status of: 2017-09-10) % % Introduced first in SolidGeometry 4.0 % % See also: featureEdges, ELplot % % G=graphofEL(EL,[n]) % === INPUT PARAMETERS === % EL: Edge list; must have unique entries! % n: optional number of vertices % === OUTPUT RESULTS ====== % G: MATLAB's Graph struct using Edges and Nodes % % EXAMPLE: % EL=featureEdges(TR3ofSG(SGsample(25)),1) % graphofEL(EL) % graphofEL(featureEdges(TR3ofSG(SGsample(3)),1)) % % See also: featureEdges, ELplot % % % Copyright 2017 Tim C. Lueth |
neighborsAngleSurface(NAL,NBL,alpha,fi)- returns connected facets with respect to a feature angle |
 | % neighborsAngleSurface(NAL,NBL,alpha,fi) - returns connected facets with respect to a feature angle % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: SURFACES) % % The required parameter NAL,NBL are calculated using TR3neighborsAngle. % Since TR3neighborsAngle can be slow, the fnctns are separated to % accelerate the repeatet use of neighborsAngleSurface. % % (Status of: 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % See also: TR3neighborsAngle % % [fa,FCL]=neighborsAngleSurface(NAL,NBL,alpha,fi) % === INPUT PARAMETERS === % NAL: =TR3neighborsAngle(TR3) % NBL: =neighbors(TR3), also delivered by [NAL,NBL]=TR3neighborsAngle(TR3) % alpha: feature angle % fi: starting facet index (can be several) % === OUTPUT RESULTS ====== % fa: facet index with respect to NAL,NBL of (TR3) % FCL: Facet connection list; optional % % EXAMPLE: % SG=SGsample(25); % [NAL,NBL]=TR3neighborsAngle(SG); fi=neighborsAngleSurface(NAL,NBL,1,22); % VLFLplot(SG.VL,SG.FL(fi,:)) % % See also: TR3neighborsAngle % % % Copyright 2017 Tim C. Lueth |
TR3featureEdges(TR3,alpha)- returns feature edge List plus edge attached facets |
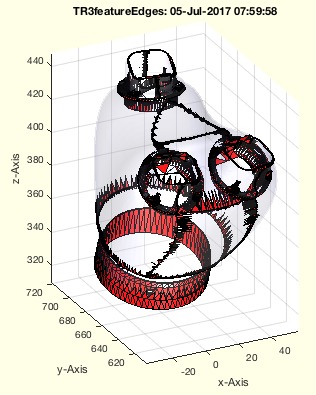 | % TR3featureEdges(TR3,alpha) - returns feature edge List plus edge attached facets % (by Tim Lueth, VLFL-Lib, 2017-JUL-05 as class: SURFACES) % % Auxiliary fnctn as starting point: % Simply calls featureEdges. It is not using edgeAttachments but an own % solution % (Status of: 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % [EL,Fi]=TR3featureEdges(TR3,alpha) % === INPUT PARAMETERS === % TR3: Triangulation % alpha: feature edge angle % === OUTPUT RESULTS ====== % EL: Feature Edge List % Fi: Index of TR3.ConnectivityList of attached facets % % EXAMPLE: % TR3featureEdges(SGsample(25),1) % % % Copyright 2017 Tim C. Lueth |
TR3neighborsAngle(TR3)- returns the angle difference between a facet an its neigbors |
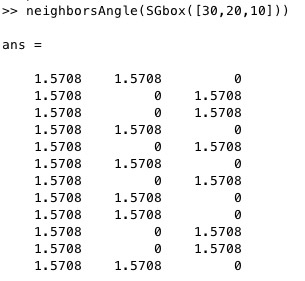 | % TR3neighborsAngle(TR3) - returns the angle difference between a facet an its neigbors % (by Tim Lueth, Video-Lib, 2017-JUL-04 as class: SURFACES) % % Calculated the difference angle between a surface and its neighbor % surfaces. % Typically used in combination with/to create the input for % fnctn neighborsAngleSurface (Status of: 2017-07-05) % % Introduced first in SolidGeometry 4.0 % % See also: neighborsAngleSurface, diffangle % % [NAL,NBL,FNL]=TR3neighborsAngle(TR3) % === INPUT PARAMETERS === % TR3: Triangulation or SG % === OUTPUT RESULTS ====== % NAL: Facet Normal Angle List wrt to NBL % NBL: Neighbor List = neighbors(TR3) % FNL: Facet normal List = faceNormal(TR3) % % See also: neighborsAngleSurface, diffangle % % % Copyright 2017 Tim C. Lueth |
loadweb(mname,overwr,urlp)- loads mat files from an web url |
 | % loadweb(mname,overwr,urlp) - loads mat files from an web url % (by Tim Lueth, VLFL-Lib, 2017-JUL-03 as class: AUXILIARY PROCEDURES) % % This fnctn reduces the size of the SG-Lib Toolbox since the '.mat' % files and the directories can be downloaded once into the user % directory. % if parameter overwr=false; the filename will be "downloaded_mname" % if parameter overwr=true; the filename will be "mname" % Try: % 'AAruffo_surf.mat' (3.6 MByte) = Geometry of some human arms % 'JACO_robot.mat' (6.1 MByte) = Geometry of the JACO robot structure % 'AIM_SGrobot.mat' (0.1 MByte) % 'AIM_Patientmodel.mat' ( 5MByte) = 216 x 216 x 26 Slices of a Human % Head CT Voxel model % 'ModulKegelradwelle_1.mat' (0.2 MByte) % 'NDI_STLs.mat' (0.1 MByte) = Geometry of the NDI mounting post for % spheres % 'IntelRealsense.mat' = pointcloud/vertexlist of VL_D300 and VL_D415 % 'CAD_pictures.mat' = Camera pictures of motors and printed circuit % boards % Try also files that are no mat files % 'Posebasecabinet.APD' - Pose syntheses ascii file (Status of: % 2019-08-22) % % Introduced first in SolidGeometry 4.0 % % See also: load, webread, webdownload, loadwebdir % % wname=loadweb(mname,[overwr,urlp]) % === INPUT PARAMETERS === % mname: name and extension of the file % overwr: true=overwrite; default is false. % urlp: web path; default is % 'http://www.mimed.mw.tum.de/fileadmin/w00bhh/www/Matlab_Toolboxes/' % === OUTPUT RESULTS ====== % wname: full path to loaded file % % EXAMPLE: % loadweb('JACO_robot.mat') % loads the downloaded file % loadweb('JACO_robot.mat',true) % replaces the original file by the downloaded file % loadweb('Posebasecabinet.APD',true) % loadweb('ARDUINO_MKR1000_Camera.png',true) % loadweb('ARDUINO_MKR1000_EAGLE.jpg',true) % loadweb ('Example_Arduino.slx',true) % % See also: load, webread, webdownload, loadwebdir % % % Copyright 2017-2020 Tim C. Lueth |
