exp_2019_01_27_chair- EXPERIMENT TO EXPLAIN THE DESIGN OF PATIENT INDIVIDUAL KINEMATIC OPTIMIZED CHAIRS |
 | % exp_2019_01_27_chair - EXPERIMENT TO EXPLAIN THE DESIGN OF PATIENT INDIVIDUAL KINEMATIC OPTIMIZED CHAIRS % (by Tim Lueth, VLFL-Lib, 2019-JAN-27 as class: EXPERIMENTS) % % Introduced first in SolidGeometry 4.4 % % See also: PoseofCPLcutui % % exp_2019_01_27_chair % % See also: PoseofCPLcutui % % % Copyright 2019-2021 Tim C. Lueth |
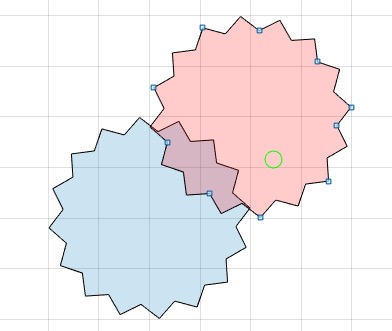
poseofPSanalyze(XX,i)- returns a Pose and a CPL from an analyzeed 3 Pose Polygon |
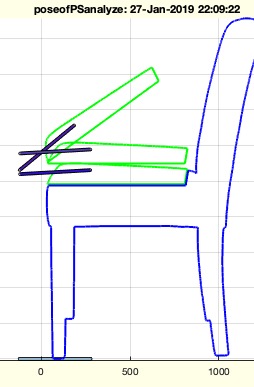 | % poseofPSanalyze(XX,i) - returns a Pose and a CPL from an analyzeed 3 Pose Polygon % (by Tim Lueth, VLFL-Lib, 2019-JAN-27 as class: KINEMATICS AND FRAMES) % % Auxiliary fnctn to automatically select contours and creates poses from % them (Status of: 2019-01-28) % % Introduced first in SolidGeometry 4.4 % % See also: PSanalyze, TofPose, Posesample, Poseplot, Posenorm, Poseui, % poseofPSanalyz % % [PS,CPL]=poseofPSanalyze(XX,i) % === INPUT PARAMETERS === % XX: Result of PSanalyze % i: optional selection if there several polygon as set of at least 3 % copies % === OUTPUT RESULTS ====== % PS: PS.A start points PS.B end Point PS.CPL moving CPL. % CPL: Kontour of a CPL that exist at least 3 times % % EXAMPLE: % XX=PSanalyze; XX.id % poseofPSanalyze(XX); PS=ans; % % % See also: PSanalyze, TofPose, Posesample, Poseplot, Posenorm, Poseui, % poseofPSanalyz % % % Copyright 2019 Tim C. Lueth |
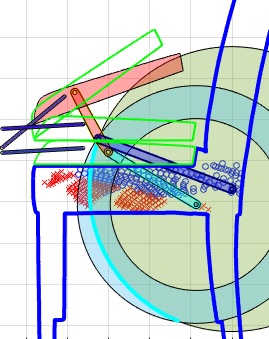
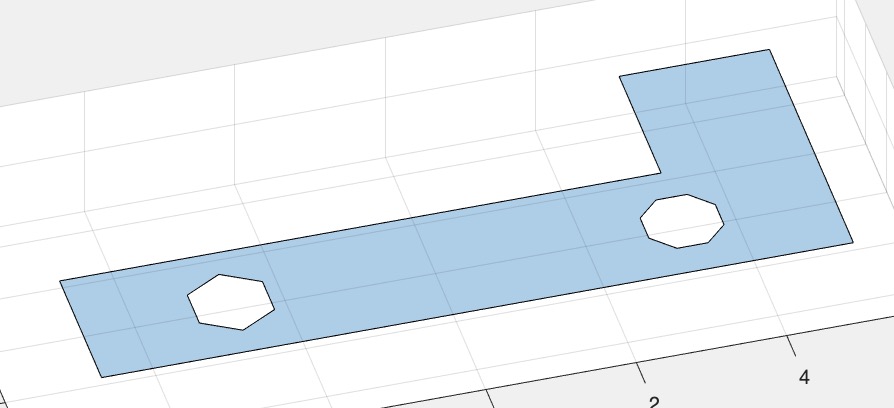
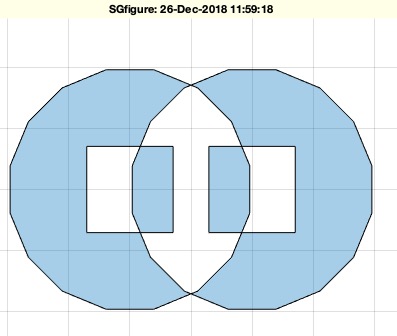
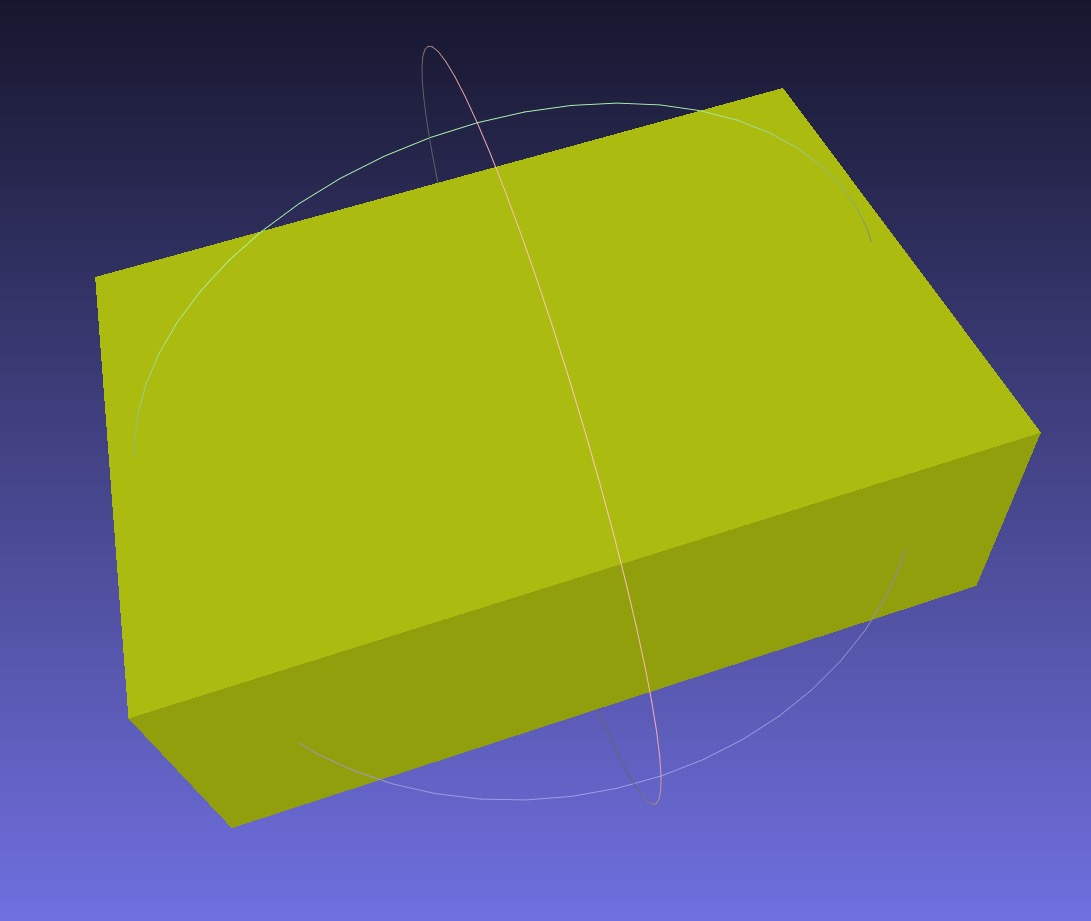
CPLsplitbool(CPLA,CPLC);- returns a CPL that is split into two pre more parts by a second contour |
 | % CPLsplitbool(CPLA,CPLC); - returns a CPL that is split into two pre more parts by a second contour % (by Tim Lueth, VLFL-Lib, 2019-JAN-27 as class: CLOSED POLYGON LISTS) % % This fnctn is helpful in combination with a interactive selected % contour. (Status of: 2019-02-09) % % Introduced first in SolidGeometry 4.4 % % See also: CPLbool, CPLboolpshape, CPLmeltbool, CPLsplitui % % [CPLA,CPLB,CPLC]=CPLsplitbool(CPLA,[CPLC]); % === INPUT PARAMETERS === % CPLA: CPL to be splitted % CPLC: CPL that overlaps with CPLA % === OUTPUT RESULTS ====== % CPLA: CPLA minus CPLB (BLUE) % CPLB: XOR of CPLA and CPLC (RED) % CPLC: CPLC used to cut; if interactive mode was used; % % EXAMPLE: loadweb chair.mat % SGfigure; CPLplot(cplchair,'b-',3); % VLui; CPLc=ans(:,1:2); CPLplot(CPLc,'r-'); % CPLsplitbool(cplchair,CPLc); % % See also: CPLbool, CPLboolpshape, CPLmeltbool, CPLsplitui % % % Copyright 2019 Tim C. Lueth |
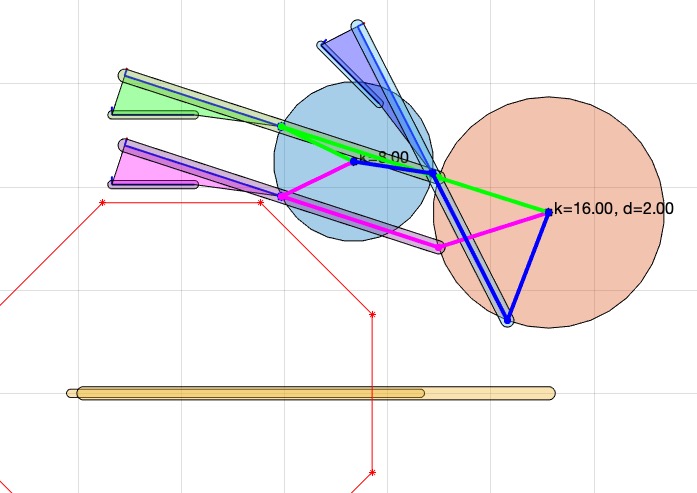
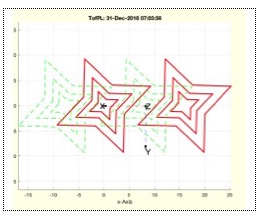
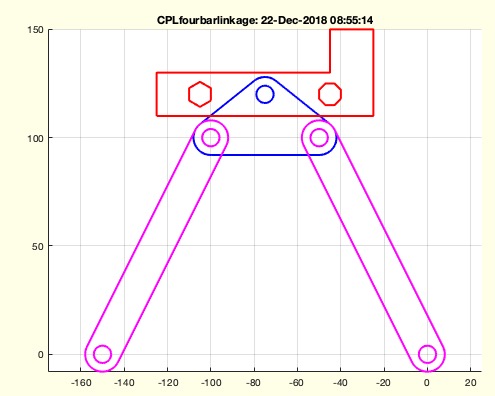
CPLfourbarlinkage2(P1,P2,P3,P4,P5,R12,CPLX,dw)- creates for a specified fourbar linkage the cpls for crank, coupler, swing |
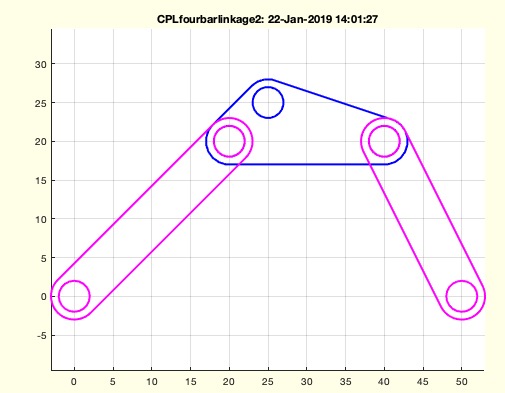 | % CPLfourbarlinkage2(P1,P2,P3,P4,P5,R12,CPLX,dw) - creates for a specified fourbar linkage the cpls for crank, coupler, swing % (by Tim Lueth, VLFL-Lib, 2019-JAN-22 as class: CLOSED POLYGON LISTS) % % The same fnctn as the original of 2018-12-17 but in this version P5 has % the definition from k=0 means P2 and k=norm(P3-P2) means P2 and the % dimension is in millimeter. Therfore P5 is completely defined in a mm % coordinate system realative to the coupler point P2 % 1. Create Poses as List of Startpoints A and Endpoints B uses % Posesample or Poseui: % >> PS=Poseui(3,.2); SGfigure; Poseplot(PS); % >> PS.A=[-0.00 0.00; 0.00 1.00; 1.00 3.00]; PS.B=[ 1.00 0.00; 1.00 % 1.00; 1.71 2.29]; % 2. Calculate a set of parameter variations for possible Solutions: % >> center3Pose(PS.A,PS.B,-20:20,-20:5:20,-3:.2:3); S=ans; whos C; % 3. Calculate and analyze all possible permutations of the parameter % variation: % >> checkfourbar3Posepermutation(PS.A,PS.B,S); FP=ans; % 4. Limit the Solution to your needs by limiting the permutations, for % example % FULL ROTATION 'u',0 DIMENSION 'l1l2rd',[5 8] % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','u',0,'l1l2rd',[2 4]); % OR FULL ROTATION 'u',0 BASES INSIDE AN AREA % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','cpl',PLcircle(2)+[3 % 3],'l1l2rd',[0 3]); % % (Status of: 2019-02-22) % % Introduced first in SolidGeometry 4.4 % % See also: invkinplan2, CPLfourbarlinkage, center3Pose, % checkfourbar3Posepermutation % % [CPL1,CPL2,CPLR,CPL,R12,CPLX,TX,dt]=CPLfourbarlinkage2([P1,P2,P3,P4,P5, % R12,CPLX,dw]) % === INPUT PARAMETERS === % P1: A0 Position of Crank Center % P2: A1 Position of TCP (end of coupler) % P3: B1 Position of link 1 (start of coupler) % P4: B0 Position of Base of link 1 (2R robot base) % P5: C0 Position of POI in mm or [POI delta x] % R12: Ro and Ri Outer and inner Radius % CPLX: Contour of the Shape linked to POI % dw: turning angle % === OUTPUT RESULTS ====== % CPL1: CPL of swing, 2R-robot link 1 % CPL2: CPL of coupler, 2R-robot link 2 % CPLR: CPL of crank, radial position specification % CPL: complete contour for sweeping % R12: [Ro and Ri] Outer and inner Radius % CPLX: CPL of Final Contour % TX: Final transformation matrix % % EXAMPLE: % CPLfourbarlinkage2('','','','',20); % CPLfourbarlinkage2('','','','',0); % CPLfourbarlinkage2('','','','',-40); % CPLfourbarlinkage2('','','','',+80); % CPLfourbarlinkage2('','','','',[+20 20]); % CPLfourbarlinkage2('','','','',[+20 20],'',CPLsample(34)*10); % % % See also: invkinplan2, CPLfourbarlinkage, center3Pose, % checkfourbar3Posepermutation % % % Copyright 2019 Tim C. Lueth |
checkfourbar3Posepermutation(A,B,S,dws)- calculates from a center3pose solution all possible permutations and the fourbar parameters |
 | % checkfourbar3Posepermutation(A,B,S,dws) - calculates from a center3pose solution all possible permutations and the fourbar parameters % (by Tim Lueth, VLFL-Lib, 2019-JAN-20 as class: KINEMATICS AND FRAMES) % % FP contains the complete solution list for all permutations w.r.t. to % the specified conditions % [L1 L2 R D C U A0 B0 iA iB kA kBd w] % Results can be animated by % >> % fourBarLinkageplotanim(FP(l,1),FP(l,2),FP(l,3),[FP(l,7:8);FP(l,9:10)],' % ',FP(l,5)==2,[],[FP(l,13), FP(l,16) FP(l,15)]); % % THIS FNCTN IS PART OF THE SEQUENCE % 1. Create Poses as List of Startpoints A and Endpoints B uses % Posesample or Poseui: % >> PS=Poseui(3,.2); SGfigure; Poseplot(PS); % >> PS.A=[-0.00 0.00; 0.00 1.00; 1.00 3.00]; PS.B=[ 1.00 0.00; 1.00 % 1.00; 1.71 2.29]; % 2. Calculate a set of parameter variations for possible Solutions: % >> center3Pose(PS.A,PS.B,-20:20,-20:5:20,-3:.2:3); S=ans; whos C; % 3. Calculate and analyze all possible permutations of the parameter % variation: % >> checkfourbar3Posepermutation(PS.A,PS.B,S); FP=ans; % 4. Limit the Solution to your needs by limiting the permutations, for % example % FULL ROTATION 'u',0 DIMENSION 'l1l2rd',[5 8] % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','u',0,'l1l2rd',[2 4]); % OR FULL ROTATION 'u',0 BASES INSIDE AN AREA % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','cpl',PLcircle(2)+[3 % 3],'l1l2rd',[0 3]); % (Status of: 2019-01-22) % % Introduced first in SolidGeometry 4.4 % % See also: center3Pose, checkfourbar3Pose, checkfourbar3Posepermutation % % % [FP,FPall]=checkfourbar3Posepermutation(A,B,S,[dws]) % === INPUT PARAMETERS === % A: Pose starting points % B: Pose end points % S: Solutions created by center3Pose % dws: distance and angle; default is first % === PROPERTY NAMES ===== % 'L1' : Interval for L1; default is [0 inf] % 'L2' : Interval for L12; default is [0 inf] % 'R' : Interval for R; default is [0 inf] % 'D' : Interval for D; default is [0 inf] % 'C' : Interval for elbow-config C; default is [1 2] % 'U' : Values for rotation [0 1 10 11] % 'ka' : Interval for kA; default is [0 inf] % 'kb' : Interval for kB; default is [0 inf] % 'x' : ? % 'y' : ? % 'CPLA' : ? % 'CPLB' : ? % === OUTPUT RESULTS ====== % FP: Existing Solution list [L1 L2 R D C U A0 B0 iA iB kA kBd w] % FPall: Table containing all possible parameters % % EXAMPLE: % center3Pose(PS.A,PS.B,[-20:.1:20],'',0); S=ans; CPLplot(CPLsample(4)); FP=checkfourbar3Posepermutation(PS.A,PS.B,S); % checkfourbar3Posepermutation(PS.A,PS.B,FP,''); % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','l1rd',[4 12]); % % % See also: center3Pose, checkfourbar3Pose, checkfourbar3Posepermutation % % % % Copyright 2019 Tim C. Lueth |
CPLremFFT(CPLin,percent)- removes points from a CPL by removing high frequencies |
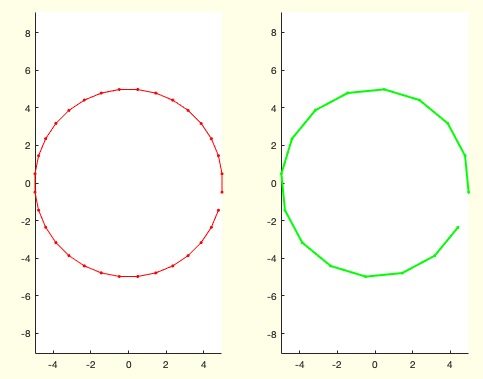 | % CPLremFFT(CPLin,percent) - removes points from a CPL by removing high frequencies % (by Alexandra Mercader, VLFL-Lib, 2019-JAN-16 as class: CLOSED POLYGON % LISTS) % % This fnctn removes high frequencies of x and y coordinates of contours. % The FFT is the method that is used for selecting the low frequencies % and deleting high frequencies of the point list. % Remark: in fftshift matlab tutorial, for even number of elements there % is one frequence more in the negative part of the transformated vector % % In contrast to CPLfft this fnctn does not insert auxiliary points into % the shape and therefor the fourier analysis considers the points as % minimum equidistant number of points(!). Therefor CPLremFFT removes % redundant auxiliary points of a shape. BE SURE that you know the number % of relevant points before using this fnctn. % % (Status of: 2019-03-06) % % See also: CPLfft, CPLremstraightAmin, CVLremstraight % % CPLout=CPLremFFT(CPLin,percent) % === INPUT PARAMETERS === % CPLin: Close point list % percent: Percentage <0..100> of the number of points that remain % === OUTPUT RESULTS ====== % CPLout: CPL with reduced number of points % % EXAMPLE: % CPLremFFT(PLcircle(5),50) % CPL=PLcircle(5); whos CPL, CPLremFFT(CPL,50); CPLN=ans; whos CPLN % CPL=PLcircle(5); whos CPL, CPLremFFT(CPL,50); CPLN=ans; whos CPLN % CPL=PLcircle(5); whos CPL, CPLremFFT(CPL,100); CPLN=ans; whos CPLN % CPL=PLsquare(5); whos CPL, CPLremFFT(CPL,50); CPLN=ans; whos CPLN % % See also: CPLfft, CPLremstraightAmin, CVLremstraight % |
exp_2019_01_16_4barcases- EXPERIMENT THAT SHOWS THE MAIN CONFIGURATIONS OF A FOURBAR LINKAGE |
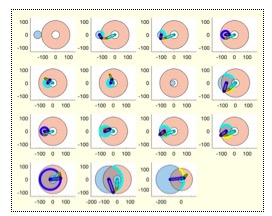 | % exp_2019_01_16_4barcases - EXPERIMENT THAT SHOWS THE MAIN CONFIGURATIONS OF A FOURBAR LINKAGE % (by Tim Lueth, VLFL-Lib, 2019-JAN-16 as class: EXPERIMENTS) % % Educational Purpose % This fnctn shows the most common configurations of a fourbarlinkage for % educational purpose (Status of: 2019-01-16) % % Introduced first in SolidGeometry 4.4 % % See also: invkinplan2, fourBarLinkageplotanim % % exp_2019_01_16_4barcases % % See also: invkinplan2, fourBarLinkageplotanim % % % Copyright 2019 Tim C. Lueth |
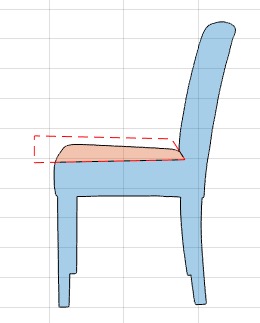
CPLgripperjaw(CPL,P0,CPL0,hg)- creates a contour for a gripper design |
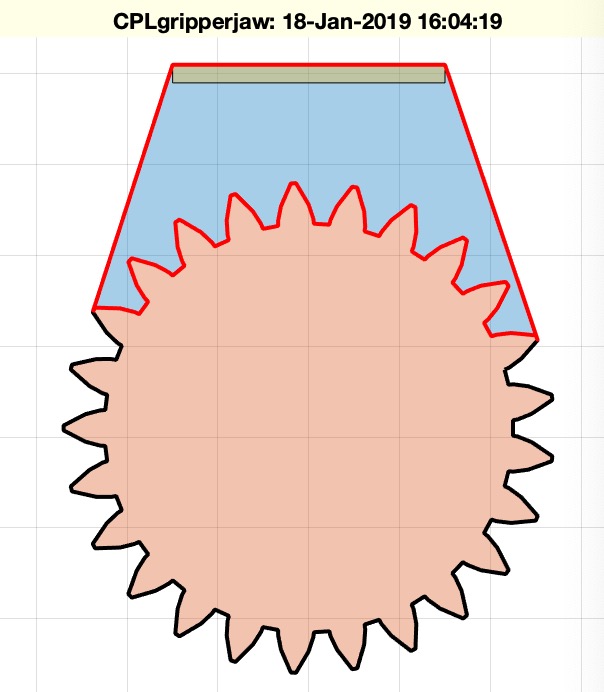 | % CPLgripperjaw(CPL,P0,CPL0,hg) - creates a contour for a gripper design % (by Tim Lueth, VLFL-Lib, 2019-JAN-16 as class: CLOSED POLYGON LISTS) % % This fnctn can be used to create a first design for a gripper jaw for a % known contour. The first parameter is the contour to be gripped at the % zero line Y=0; the second parameter is the relative position P0 of the % TCP or the attachment point of the gripper to a kinematic system. The % third parameter is the contour around the attachment points P0. The % fourth parameter h0 describes how deep the gripper should plunge into % the contour to be gripped under Y=0 line. Y=0-h0 % The fifth parameter describes whether the gripper should only represent % the convex hull of the object. (Status of: 2019-01-18) % % Introduced first in SolidGeometry 4.4 % % See also: CPLfourbarlinkage % % [CPLF,CPLF0]=CPLgripperjaw([CPL,P0,CPL0,hg]) % === INPUT PARAMETERS === % CPL: Object contour to be grasped (Orange) % P0: Position of TCP % CPL0: Contour around TCP (green) % hg: depth of gripper jaw into the object % === OUTPUT RESULTS ====== % CPLF: Final Gripper Jaw Contour (red contour) % CPLF0: Final Gripper Jaw Contour (red contour) with origin in P0 % % EXAMPLE: % CPLgripperjaw(CPLsample(4)-[0 9],[0 5],PLsquare(30,2),5) % CPLgripperjaw(CPLsample(21)-[0 9],[0 30],PLsquare(30,2),0); % CPLgripperjaw(CPLsample(21)-[0 9],[0 30],PLsquare(30,2),0,true); % CPLgripperjaw(PLsquare(20,2)-[0,1],[0 10],PLcircle(4)); % [a,b]=CPLgripperjaw; SGfigure; CPLplot(a,'r-');CPLplot(b,'-b') % % See also: CPLfourbarlinkage % % % Copyright 2019 Tim C. Lueth |
realfourbarsolutions(rs,mtyp)- creates an index list to map fourbarlinkage solution points to movement types |
 | % realfourbarsolutions(rs,mtyp) - creates an index list to map fourbarlinkage solution points to movement types % (by Tim Lueth, VLFL-Lib, 2019-JAN-15 as class: KINEMATICS AND FRAMES) % % This fnctn analyzes the results of the invkinplan2 fnctn for a circular % path and generates an index list with which all invkinplan2 results can % be mapped for a motion simulation. (Status of: 2019-05-12) % % Introduced first in SolidGeometry 4.4 % % See also: miofPLA0B0, invkinplan2, checkfourbarsegment, % shiftindexofinvkinplan2 % % [nni,seg]=realfourbarsolutions(rs,[mtyp]) % === INPUT PARAMETERS === % rs: real solution flag of invkinplan2 % mtyp: 'forw', 'backw', 'alt' % === OUTPUT RESULTS ====== % nni: mapping index for PL, B1, B2, W, U of invkinplan2 % seg: 0 = closed movement, 1 = one segment, 2 - two segments % % EXAMPLE: % invkinplan2(70,40,[50 -65 0]); [~,~,B1,B2,rs,PL]=invkinplan2(70,40,[50 -65 0]); % [nni,seg]=realfourbarsolutions(rs,'forw'), PLA=PL(nni(seg==1),:), PLB=PL(nni(seg==2),:) % PLplot(PLA,'c',4); PLplot(PLB,'y',4); shg; % % [~,~,B1,B2,rs,PL]=invkinplan2(70,40,[50 -65 0]); % [nni,seg]=realfourbarsolutions(rs,'forw'), PLA=PL(nni(seg==1),:), PLB=PL(nni(seg==2),:) % ns=max(seg); for i=1:ns; PLi=PL(nni(seg==i),:), PLplot(PLi,colofn(i+1,'bcy'),4); end; shg; view(0,90); % % See also: miofPLA0B0, invkinplan2, checkfourbarsegment, % shiftindexofinvkinplan2 % % % Copyright 2019 Tim C. Lueth |
miofPLA0B0(PL,A0,B0)- returns the index of the minimal relative angle to the axis between A0 and B0 |
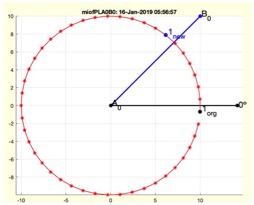 | % miofPLA0B0(PL,A0,B0) - returns the index of the minimal relative angle to the axis between A0 and B0 % (by Tim Lueth, VLFL-Lib, 2019-JAN-14 as class: KINEMATICS AND FRAMES) % % This fnctn is used to find the circshift index for the point list of a % fourbar-linkage. The original PL describes a circle around P0 starting % at 0 degrees to 360 degrees. However, it makes more sense to rotate the % PL relative to the axis A0B0. Therefore all results of invkinplan2 have % to be circshifted. % This auxiliary fnctn is used in fourBarLinkageplotanim. (Status of: % 2019-05-12) % % Introduced first in SolidGeometry 4.4 % % See also: invkinplan2, fourBarLinkageplotanim, checkfourbarsegment, % shiftindexofinvkinplan2, realfourbarsolutions % % mi=miofPLA0B0(PL,A0,B0) % === INPUT PARAMETERS === % PL: Point List (A1) of a fourbar linkage % A0: Base Point A0 % B0: Base Point B0 % === OUTPUT RESULTS ====== % mi: shift index for PL=circshift(PL,-mi) % % EXAMPLE: % miofPLA0B0(PLcircle(10),[0 0],[10 10]) % miofPLA0B0(PLcircle(10)+[5 4],[5 4],[10 10]) % % mi=miofPLA0B0(PL,A0,B0); PL=circshift(PL,-mi); B1=circshift(B1,-mi); % % See also: invkinplan2, fourBarLinkageplotanim, checkfourbarsegment, % shiftindexofinvkinplan2, realfourbarsolutions % % % Copyright 2019 Tim C. Lueth |
checkfourbarcouplerlength(B1,B2,PL,l2chk,tol)- checks the solutions of invkinplan2 for a fourbar linkage calculation |
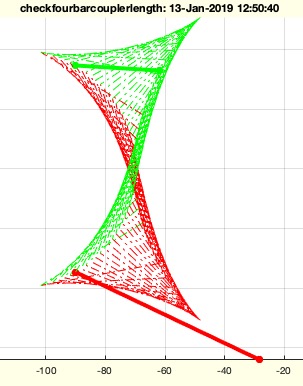 | % checkfourbarcouplerlength(B1,B2,PL,l2chk,tol) - checks the solutions of invkinplan2 for a fourbar linkage calculation % (by Tim Lueth, VLFL-Lib, 2019-JAN-13 as class: KINEMATICS AND FRAMES) % % for some unexpected and unclear reasons, the inverse kinematic % equations have some numerical instability. This fnctn was implemented % and is used within invkinplan2 to warn if the calculations contains % numerical errors. (Status of: 2019-01-13) % % Introduced first in SolidGeometry 4.4 % % See also: invkinplan2 % % [ok,ind1,ind2,err,r1,r2]=checkfourbarcouplerlength(B1,B2,PL,[l2chk,tol]) % === INPUT PARAMETERS === % B1: REAL Solutions of joint 1 configuration ellbow down % B2: REAL Solutions of joint 1 configuration ellbow up % PL: REAL Point list for TCP % l2chk: expected length of link 2 % tol: tolerance default is 1e-7 , i.e. eps2 % === OUTPUT RESULTS ====== % ok: true of there is no problem % ind1: index of B1 with problem % ind2: index of B2 with problem % err: maximum accoured error % r1: average link length l2 for configuration ellbow down % r2: average link length l2 for configuration ellbow up % % EXAMPLE: % [~,~,B1,B2,rs,PL]=invkinplan2(70,40,[40 -110 0 120]); B1=B1(rs,:); B2=B2(rs,:); PL=PL(rs,:); checkfourbarcouplerlength(B1,B2,PL,40) % % See also: invkinplan2 % % % Copyright 2019 Tim C. Lueth |
center3Poseconditions(S,)- returns a reduced Solution matrix for the given S values of |
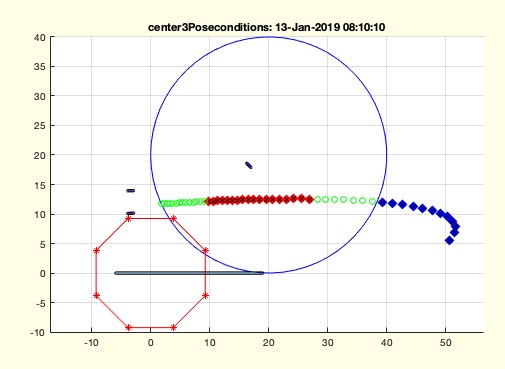 | % center3Poseconditions(S,) - returns a reduced Solution matrix for the given S values of % (by Tim Lueth, VLFL-Lib, 2019-JAN-13 as class: KINEMATICS AND FRAMES) % % ======================================================================= % OBSOLETE (2019-01-26) - USE 'checkfourbar3Posepermutation' INSTEAD % ======================================================================= % % The condition independent on the displacement and turning angle are % Radius - To limit the radius of Crank and Swing % Area - To define the base point area from the design point of view % % The condition that on the displacement and turning angle are % Pair Distance - To limit the distance of a pair of base points % Exist 4bar - there exist a fourbar configuration solution % % The sequence of 3 Pose synthesis calculation of fourbar linkages is: % 1. center3Pose - calculates a 3D array of solutions for 3 poses % 2. center3Poseconditions, - reduces solutions f.e. radius,area % 3. checkfourbar3Poses - analyses the configuration of the solution % 4. checkallfourbar3Poses - analyses all solutions's configurations % The shape of a linkage is created by: % A) CPLfourbarlinkage - creates 2D contours of the links % B) CPLgripperjaw - creates 2D contour of a gripper that grasps an object % and animated by: % B) fourBarLinkageplot - shows several solutions for two configurations % C) fourBarLinkageplotanim - animates the movement of a complete contour % All those fnctns are based on % invkinplan2 - that calculates both configurations for a planar 2bar % linkage % (Status of: 2019-01-26) % % Introduced first in SolidGeometry 4.4 % % See also: [ checkfourbar3Posepermutation ] ; center3Pose, % checkfourbar3Poses % % S=center3Poseconditions(S,[]) % === INPUT PARAMETERS === % S: Original Solution list from center3Pose % === PROPERTY NAMES ===== % 'r' : maximal Radius [Rmax] or [Rmin Rmax] - RED ERRORS % 'area' : CPL of the allowed area for Centers - BLUE ERRORS % 'pair' : Distance of base point pairs [dmax] or [dmin dmax] % === OUTPUT RESULTS ====== % S: Solution list with removed lines that do not fullful the conditions % % EXAMPLE: % PS.A=[-3.88 10.85; -3.88 12.40; 10.08 17.05]; PS.B=[ -2.88 10.85; -2.88 12.40; 11.04 16.79]; % center3Pose(PS.A,PS.B,-10:40); S=ans, CPLplot(CPLsample(4)); % center3Poseconditions(S,'r',[10 60]), CPLplot(CPLsample(4)); Poseplot(PS) % % See also: [ checkfourbar3Posepermutation ] ; center3Pose, % checkfourbar3Poses % % % Copyright 2019 Tim C. Lueth |
fourBarLinkageplot(l1,l2,r,A0,np)- plots and animates the movement of a fourbar linkage |
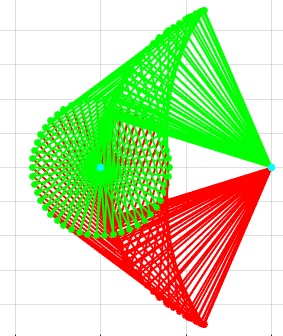 | % fourBarLinkageplot(l1,l2,r,A0,np) - plots and animates the movement of a fourbar linkage % (by Tim Lueth, VLFL-Lib, 2019-JAN-12 as class: VISUALIZATION) % % Introduced first in SolidGeometry 4.4 % % See also: CPLfourbarlinkage, fourBarLinkageplotanim % % h=fourBarLinkageplot([l1,l2,r,A0,np]) % === INPUT PARAMETERS === % l1: length of link1 at Base B0 % l2: length of link2 / coupler % r: radius of crank at Base A0 or Point List around A0 % A0: distance, A0-B0, Position of A0 or List [A0;B0] % np: number of points on the crank circle % === OUTPUT RESULTS ====== % h: handle to last graphics objects % % EXAMPLE: % SGfigure; axis([-100 100 -100 100]); h=fourBarLinkageplot (50,70,50,[30 30; 35 35]); shg % SGfigure; axis([-100 100 -100 100]); h=fourBarLinkageplot (50,70,50,[30 30; 35 35],10); shg % SGfigure; axis([-100 100 -100 100]); h=fourBarLinkageplot (100,70,40,100,50); shg % SGfigure; fourBarLinkageplot(4,4,PLcircle(3,3)+[-4 0]); shg % % See also: CPLfourbarlinkage, fourBarLinkageplotanim % % % Copyright 2019 Tim C. Lueth |
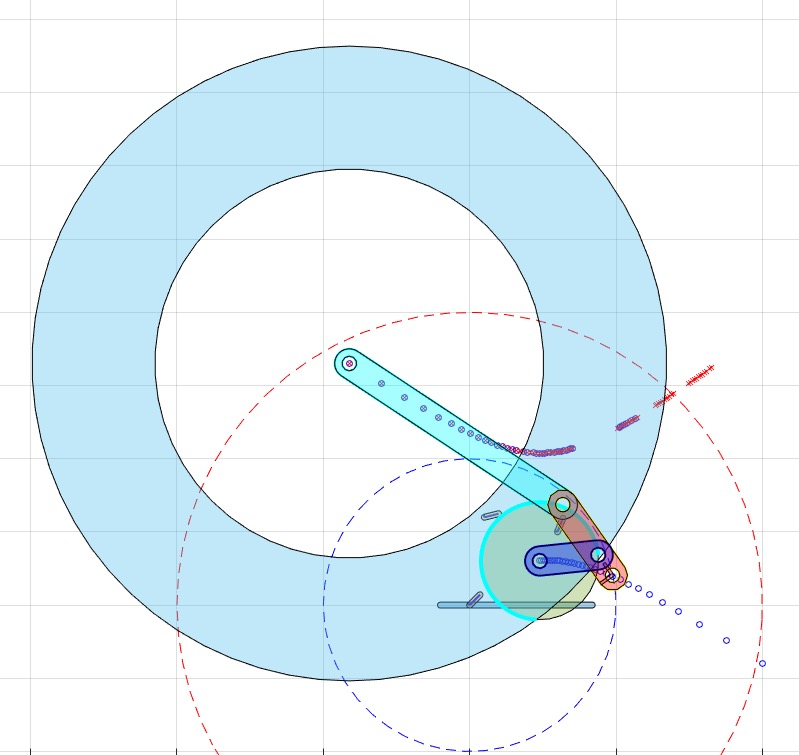
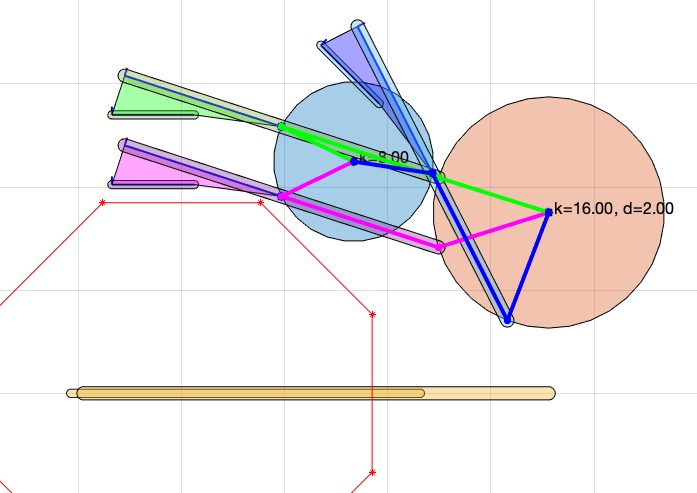
fourBarLinkageplotanim(l1,l2,r,A0,tmove,elup,transl,ka)- plots and animates the movement of a fourbar linkage |
 | % fourBarLinkageplotanim(l1,l2,r,A0,tmove,elup,transl,ka) - plots and animates the movement of a fourbar linkage % (by Tim Lueth, VLFL-Lib, 2019-JAN-12 as class: VISUALIZATION) % % THERE ARE MORE THAN 8 PARAMETER! 9th parameter is CPLE Effector Contour % 10th is 'angle' is an optional Porpertyname for angle areas. Important % fnctn for simulating the movement of forbarlinkages.There is a ninth % parameter, the CPL-shape of the tool attached to the coupler position % at [ka w d]. By default this CPL is a L-shaped ccordinate system. % (Status of: 2021-12-05) % % Introduced first in SolidGeometry 4.4 % % See also: CPLfourbarlinkage, fourBarLinkageplot, CPLfourbarlinkage2, % CPLfourbarcontour % % h=fourBarLinkageplotanim([l1,l2,r,A0,tmove,elup,transl,ka]) % === INPUT PARAMETERS === % l1: length of link1 at Base B0 % l2: length of link2 / coupler % r: radius of crank at Base A0 % A0: distance, A0-B0, Position of A0 or List [A0;B0] % tmove: time to animate; default is 2 sec % elup: elbow up (true) elbow down (false); default is false; % transl: transparancey for swept volume (0..1); default is 0; % ka: either ka or[ka w] or [ka w disp] % === PROPERTY NAMES ===== % 'alpha' : optional angle limitation [wmin wmax] % === OUTPUT RESULTS ====== % h: handle to last graphics objects % % EXAMPLE: % axis([-100 100 -100 100]); h=fourBarLinkageplotanim (50,70,50,[30 30; 35 35],10,true); shg % axis([-100 100 -100 100]); h=fourBarLinkageplotanim (50,70,50,[30 30; 35 35],10,false); shg % SGfigure; fourBarLinkageplotanim(70,40,40,[0 0; 0 110]); % SGfigure; fourBarLinkageplotanim([110,50,110,60]); % A0-B0, B0-B1, B1-A1; A1-A0 % % See also: CPLfourbarlinkage, fourBarLinkageplot, CPLfourbarlinkage2, % CPLfourbarcontour % % % Copyright 2019-2021 Tim C. Lueth |
checkallfourbar3Poses(A,B,Sall,CPL)- checks whether a fourbar joint solution exists for results of center3Pose |
 | % checkallfourbar3Poses(A,B,Sall,CPL) - checks whether a fourbar joint solution exists for results of center3Pose % (by Tim Lueth, VLFL-Lib, 2019-JAN-10 as class: KINEMATICS AND FRAMES) % % ======================================================================= % OBSOLETE (2019-01-26) - USE 'checkfourbar3Posepermutation' INSTEAD % ======================================================================= % % r= S(ka,4); % radius of crank % l1=S(kb,4); % radius of follower % l2=S(kb,1)-S(ka,1); % length of coupler % do=S(ka,5); % displacement of coupler % wo=S(ka,6); % Angle deviation before displacement % A0=S(ka,2:3); % Base of crank % B0=S(kb,2:3); % Base of follower % d=norm(A0-B0); % distance between both bases % % The sequence of 3 Pose synthesis calculation of fourbar linkages is: % 1. center3Pose - calculates a 3D array of solutions for 3 poses % 2. center3Poseconditions, - reduces solutions f.e. radius,area % 3. checkfourbar3Poses - analyses the configuration of the solution % 4. checkallfourbar3Poses - analyses all solutions's configurations % The shape of a linkage is created by: % A) CPLfourbarlinkage - creates 2D contours of the links % B) CPLgripperjaw - creates 2D contour of a gripper that grasps an object % and animated by: % B) fourBarLinkageplot - shows several solutions for two configurations % C) fourBarLinkageplotanim - animates the movement of a complete contour % All those fnctns are based on % invkinplan2 - that calculates both configurations for a planar 2bar % linkage % % (Status of: 2019-01-24) % % Introduced first in SolidGeometry 4.4 % % See also: [ checkfourbar3Posepermutation ] ; center3Pose, % checkfourbar3Pose, Posesample, Poseplot, TofPose, Posenorm, Poseui % % [C,SNN]=checkallfourbar3Poses(A,B,Sall,[CPL]) % === INPUT PARAMETERS === % A: Starting Points of 3 Poses % B: Ending Points of 3 Poses % Sall: Solutions comming from center3Pose % CPL: selected pair of distance and angle % === OUTPUT RESULTS ====== % C: configuration for pose of a fourbar linkage % SNN: % % EXAMPLE: % PS.A=[10.50 -4.38; 3.50 -10.50; -5.25 -10.50]; PS.B=[ 9.79 -5.08; 2.50 -10.50; -5.96 -9.79]; % center3Pose(PS.A,PS.B,[-10 00],0,-pi/4); S=ans, CPLplot(CPLsample(4)); checkfourbar3Pose(PS.A,PS.B,S,'verbose % % See also: [ checkfourbar3Posepermutation ] ; center3Pose, % checkfourbar3Pose, Posesample, Poseplot, TofPose, Posenorm, Poseui % % % Copyright 2019 Tim C. Lueth |
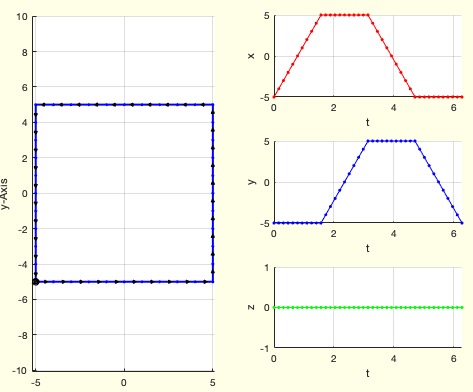
TofPose(AL,BL,ind)- returns 3x3 HT matrices for planar transformation in 2D from pose list |
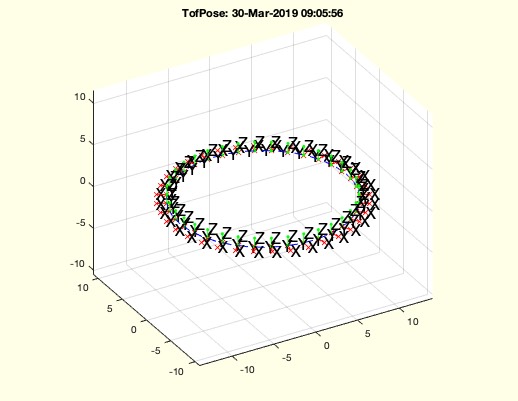 | % TofPose(AL,BL,ind) - returns 3x3 HT matrices for planar transformation in 2D from pose list % (by Tim Lueth, VLFL-Lib, 2019-JAN-05 as class: KINEMATICS AND FRAMES) % % Powerful planar fnctn to create either a HT matrix from two points or a % list of HT matrixes from a list of points or from a Pose struct PS.A, % PS.B. % TofPose - Frame of A1 from Point A1 and B1 % TofPoseGPL - Frames of A1 and B1 from Pose and GPL % TofA1B1GPL - Frame of Pose from A1 and B1 and GPL % TofPoseattachmentpoints - Frames of B1 and A1 from Pose qnd Points A1 % and B1 % (Status of: 2021-12-10) % % Introduced first in SolidGeometry 4.4 % % See also: TofPoseattachmentpoints, Posesample, Poseplot, Posenorm, % Poseui, center3Pose, checkfourbar3Pose, poseofPSanalyze % % TAi=TofPose(AL,[BL,ind]) % === INPUT PARAMETERS === % AL: Point list [n x 2] for points A or a struct with fields A and B % BL: Point list [n x 2] for points B % ind: selected indices; default is all % === OUTPUT RESULTS ====== % TAi: Transformation Matrix in A for each Pose; ex = B(i,:)-A(i,:); % t=A(i,;) % % EXAMPLE: % Pose=Posesample(7), TofPose(Pose.A,Pose.B) % PS.A=PLcircle(10,36); PS.B=PS.A*2; TofPose(PS) % % See also: TofPoseattachmentpoints, Posesample, Poseplot, Posenorm, % Poseui, center3Pose, checkfourbar3Pose, poseofPSanalyze % % % Copyright 2019-2021 Tim C. Lueth |
Posenorm(PS,l,ka)- changes the length of pose vectors to a common length and shifts the start point |
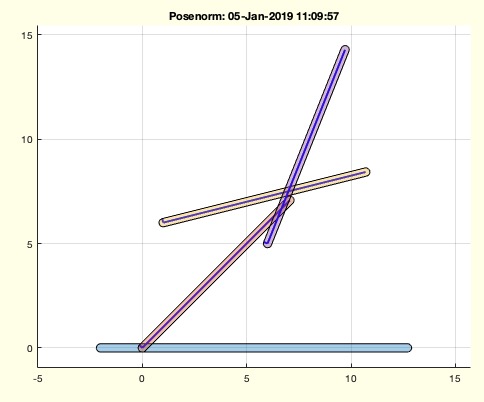 | % Posenorm(PS,l,ka) - changes the length of pose vectors to a common length and shifts the start point % (by Tim Lueth, VLFL-Lib, 2019-JAN-05 as class: KINEMATICS AND FRAMES) % % Introduced first in SolidGeometry 4.4 % % See also: Posesample, Poseplot, TofPose, Poseui, center3Pose, % checkfourbar3Pose % % [PS,e,o]=Posenorm(PS,[l,ka]) % === INPUT PARAMETERS === % PS: Pose.A and Pose.B % l: desired length; default is 1 % ka: starting offset relative to A % === OUTPUT RESULTS ====== % PS: Adjusted Pose.A and Pose.B % e: direction vector % o: orthogonal vector % % EXAMPLE: % Posenorm(Posesample(7)) % Posenorm(Posesample(7),10) % Posenorm(Posesample(7),10,-10) % [a,b,c]=Posenorm(PS,10) % % See also: Posesample, Poseplot, TofPose, Poseui, center3Pose, % checkfourbar3Pose % % % Copyright 2019 Tim C. Lueth |
Poseui(m,res,ax)- returns a pose struct |
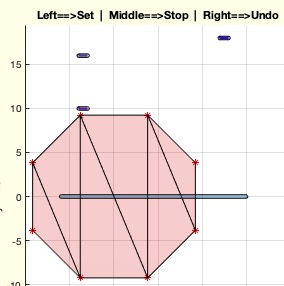 | % Poseui(m,res,ax) - returns a pose struct % (by Tim Lueth, VLFL-Lib, 2019-JAN-05 as class: USER INTERFACE) % % Pose.A = Start Points of pose % Pose.B = End Points of pose (Status of: 2019-02-20) % % Introduced first in SolidGeometry 4.4 % % See also: Posesample, Poseplot, Poseplotspace, TofPose, Posenorm, % center3Pose, checkfourbar3Pose % % Pose=Poseui([m,res,ax]) % === INPUT PARAMETERS === % m: number of poses; default is 3 % res: resolution; default is 2% of sofBB % ax: axis; default is unchanged % === OUTPUT RESULTS ====== % Pose: Pose.A = Start Points of pose, Pose.B = End Points of pose % % EXAMPLE: % CPLsample(4); Poseui('',1) % % See also: Posesample, Poseplot, Poseplotspace, TofPose, Posenorm, % center3Pose, checkfourbar3Pose % % % Copyright 2019 Tim C. Lueth |
Poseplot(PS,l,col,CPLE,k,ts,psel)- plots a pose struct |
 | % Poseplot(PS,l,col,CPLE,k,ts,psel) - plots a pose struct % (by Tim Lueth, VLFL-Lib, 2019-JAN-02 as class: KINEMATICS AND FRAMES) % % Poseplot supports the following struct elements % PS.A Pose Start Point % PS.B Pose End Point % PS.CPLE Contour of the effector % PS.A0 Center Point of Crank either [x y] or [x y R] % PS.B0 Center Point of Swing either [x y] or [x y R] % PS.A1 Attachment Point of Crank either [x y] or [x y Pose#] % PS.B1 Attachment Point of Swing either [x y] or [x y Pose#] % (Status of: 2019-02-26) % % Introduced first in SolidGeometry 4.4 % % See also: Posesample, Poseplotspace, TofPose, Posenorm, Poseui, % center3Pose, checkfourbar3Pose, poseofPSanalyze % % [h,l]=Poseplot(PS,[l,col,CPLE,k,ts,psel]) % === INPUT PARAMETERS === % PS: PS.A = Starting Points, PS.B = End Points % l: optional length % col: optional color % CPLE: optional shape contour % k: displacement along axis; default is 0 % ts: text size of descriptor; default is 0 % psel: selected poses to plot; default is 1:size(PS.A,1) % === OUTPUT RESULTS ====== % h: handle to plot % l: selected pose length if cal. automatic % % EXAMPLE: % PS=Posesample(1); SGfigure; Poseplot(PS); % close all; Poseplot(Posesample(10),100,'r-*',PLsquare(5,2),5,16); pause(1); delete(ans) % % PS=Posesample(7); PS.A1=[0 1]; PS.B1=[2 1]; cla; Poseplot(PS); % Attachment points relative to [0 0] % PS=Posesample(7); PS.A1=[0 1 1]; PS.B1=[2 1 1]; cla; Poseplot(PS); % Attachment points relative to Pose 1 % PS.A0=[5 5]; PS.B0=[3 3]; cla; Poseplot(PS); shg % Now show Center Points and Fourbarlinkage % PS.CPLE=PLsquare([6,2]); cla; Poseplot(PS); shg % Show also the effektor % % See also: Posesample, Poseplotspace, TofPose, Posenorm, Poseui, % center3Pose, checkfourbar3Pose, poseofPSanalyze % % % Copyright 2019-2021 Tim C. Lueth |
Posesample(n)- creates sample poses for the pose syntheses of linkages |
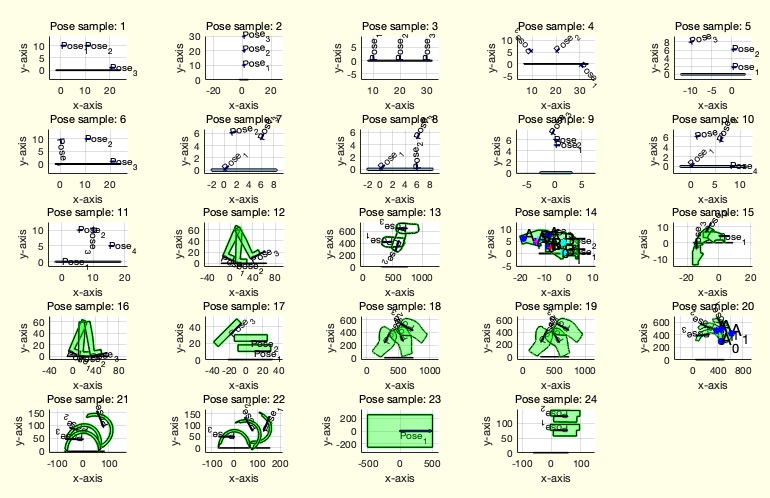 | % Posesample(n) - creates sample poses for the pose syntheses of linkages % (by Tim Lueth, VLFL-Lib, 2019-JAN-02 as class: KINEMATICS AND FRAMES) % % load Posesamples.mat % Posesample{10,1}='Tiegel'; Posesample{10,2}=PSnew % save ('Posesamples','Posesamples') % saveTL(Posesamples) (Status of: 2022-01-07) % % Introduced first in SolidGeometry 4.4 % % See also: exp_2019_01_16_4barcases, CPLoftext, CPLsample, SGsample, % VLsample, PLsample, VLFLsample, CSGsample, SGerrorsample, % SGfischertechniksample, SGcmdsample, testfunctTL, permutevector, saveTL % % PS=Posesample([n]) % === INPUT PARAMETERS === % n: selection number or string in Posesampels.mat(:,1) % === OUTPUT RESULTS ====== % PS: PS.A = list of start point; PS.B=list of end points % % EXAMPLE: % Posesample % Posesample(1) % Posesample('?') % Posesample('Angiotable15') % % See also: exp_2019_01_16_4barcases, CPLoftext, CPLsample, SGsample, % VLsample, PLsample, VLFLsample, CSGsample, SGerrorsample, % SGfischertechniksample, SGcmdsample, testfunctTL, permutevector, saveTL % % % Copyright 2019-2022 Tim C. Lueth |
checkfourbar3Pose(A,B,S,dws,k,pl,ki)- checks whether a fourbar joint solution exists for results of center3Pose |
 | % checkfourbar3Pose(A,B,S,dws,k,pl,ki) - checks whether a fourbar joint solution exists for results of center3Pose % (by Tim Lueth, VLFL-Lib, 2019-JAN-01 as class: KINEMATICS AND FRAMES) % % r= S(ka,4); % radius of crank % l1=S(kb,4); % radius of follower % l2=S(kb,1)-S(ka,1); % length of coupler % do=S(ka,5); % displacement of coupler % wo=S(ka,6); % Angle deviation before displacement % A0=S(ka,2:3); % Base of crank % B0=S(kb,2:3); % Base of follower % d=norm(A0-B0); % distance between both bases % % ====================================================================== % THIS FNCTN IS PART OF THE SEQUENCE % 1. Create Poses as List of Startpoints A and Endpoints B uses % Posesample or Poseui: % >> PS=Poseui(3,.2); SGfigure; Poseplot(PS); % >> PS.A=[-0.00 0.00; 0.00 1.00; 1.00 3.00]; PS.B=[ 1.00 0.00; 1.00 % 1.00; 1.71 2.29]; % 2. Calculate a set of parameter variations for possible Solutions: % >> center3Pose(PS.A,PS.B,-20:20,-20:5:20,-3:.2:3); S=ans; whos C; % 3. Calculate and analyze all possible permutations of the parameter % variation: % >> checkfourbar3Posepermutation(PS.A,PS.B,S); FP=ans; % >> checkfourbar3Pose(PS.A,PS.B,S); % if there is only one assembly % 4. Limit the Solution to your needs by limiting the permutations, for % example % FULL ROTATION 'u',0 DIMENSION 'l1l2rd',[5 8] % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','u',0,'l1l2rd',[2 4]); % OR FULL ROTATION 'u',0 BASES INSIDE AN AREA % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','cpl',PLcircle(2)+[3 % 3],'l1l2rd',[0 3]); % ====================================================================== % All those fnctns are based on % invkinplan2 - that calculates both configurations for a planar 2bar % linkage (Status of: 2019-03-26) % % Introduced first in SolidGeometry 4.4 % % See also: checkfourbarsegment, center3Pose, Posesample, Poseplot, % TofPose, Posenorm, Poseui % % [ci,s,ord,corg,wres,A0,B0]=checkfourbar3Pose(A,B,S,[dws,k,pl,ki]) % === INPUT PARAMETERS === % A: Starting Points of 3 Poses % B: Ending Points of 3 Poses % S: Solutions comming from center3Pose % dws: selected pair of distance and angle % k: selected values for k; default are first and last of S % pl: length of pose % ki: Direct access to k values % === OUTPUT RESULTS ====== % ci: configuration for pose of a fourbar linkage % s: rotation segment for earch pose % ord: movement order of poses; right-hand-rule % corg: original configuration for each pose % wres: angle segments; 0 => no solution exist; [] => no limits exist % A0: Rotation center of crank % B0: Rotation center of swing % % EXAMPLE: % PS=Posesample(7); % center3Pose(PS.A,PS.B,[0 1],0,0); S=ans, CPLplot(CPLsample(4)); checkfourbar3Pose(PS.A,PS.B,S) % center3Pose(PS.A,PS.B,[0 3],0,0); S=ans, CPLplot(CPLsample(4)); checkfourbar3Pose(PS.A,PS.B,S) % center3Pose(PS.A,PS.B,[-3 3],0,0); S=ans, CPLplot(CPLsample(4)); checkfourbar3Pose(PS.A,PS.B,S) % % See also: checkfourbarsegment, center3Pose, Posesample, Poseplot, % TofPose, Posenorm, Poseui % % % Copyright 2019 Tim C. Lueth |
center3Pose(A,B,k,dall,wall,CPL);- return center points for 3 poses (position and orientation) |
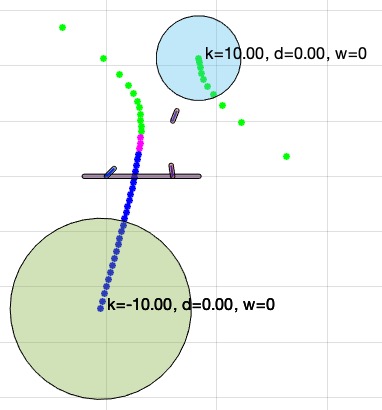 | % center3Pose(A,B,k,dall,wall,CPL); - return center points for 3 poses (position and orientation) % (by Tim Lueth, VLFL-Lib, 2019-JAN-01 as class: ANALYTICAL GEOMETRY) % % center3Pose is a very powerful fnctn for the design of fourbar linkages % under a variety of optimization criterias. % k stands for the distance of the coupler point to the poses % r stands for the radius of the crank % C stands for the base of the crank % d stands for the distance of coupler to pose % w stand for angle deviation of coupler to pose % e stands for the distance error of the found solution % For a fourbar linkage it is necessary to select two k points to get two % center points for crank and follower. % ====================================================================== % THIS FNCTN IS PART OF THE SEQUENCE % 1. Create Poses as List of Startpoints A and Endpoints B uses % Posesample or Poseui: % >> PS=Poseui(3,.2); SGfigure; Poseplot(PS); % >> PS.A=[-0.00 0.00; 0.00 1.00; 1.00 3.00]; PS.B=[ 1.00 0.00; 1.00 % 1.00; 1.71 2.29]; % 2. Calculate a set of parameter variations for possible Solutions: % >> center3Pose(PS.A,PS.B,-20:20,-20:5:20,-3:.2:3); S=ans; whos C; % 3. Calculate and analyze all possible permutations of the parameter % variation: % >> checkfourbar3Posepermutation(PS.A,PS.B,S); FP=ans; % 4. Limit the Solution to your needs by limiting the permutations, for % example % FULL ROTATION 'u',0 DIMENSION 'l1l2rd',[5 8] % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','u',0,'l1l2rd',[2 4]); % OR FULL ROTATION 'u',0 BASES INSIDE AN AREA % checkfourbar3Posepermutation(PS.A,PS.B,FP,'','cpl',PLcircle(2)+[3 % 3],'l1l2rd',[0 3]); % ====================================================================== % All those fnctns are based on % invkinplan2 - that calculates both configurations for a planar 2bar % linkage (Status of: 2019-01-31) % % Introduced first in SolidGeometry 4.4 % % See also: center3P, center3Poseeffektorgrid, center3Poseconditions, % checkfourbar3Pose, checkallfourbar3Poses, Posesample, Poseplot, % TofPose, Posenorm, Poseui, KDWPosevariation % % [S,rs,Sall,PSall,dw]=center3Pose([A,B,k,dall,wall,CPL]); % === INPUT PARAMETERS === % A: List of at least 3 points that define a pose % B: List of at least 3 points that define a direction in combination % with A % k: list of checking values for a point along the line A+k*(B-A)/|(B-A)| % dall: displacement orthogonal to pose line; default is 0 % wall: turning angle of the pose relative to pose; default is 0; % CPL: Optional area for solutions % === OUTPUT RESULTS ====== % S: [k C r d w] % rs: real solutions if CPL is used % Sall: All Solutions S=Sall(rs,:) % PSall: All Poses % dw: % % EXAMPLE: % k=-2:0.2:2; center3Pose([0 0;6 0; 6 5],'',k) % close all; k=-10:0.4:10; center3Pose([0 0;6 0; 6 5],'',k'); S=ans % close all; center3Pose('','',-30:30,'','',PLsquare(10,8)+[-10 0]); S=ans % % See also: center3P, center3Poseeffektorgrid, center3Poseconditions, % checkfourbar3Pose, checkallfourbar3Poses, Posesample, Poseplot, % TofPose, Posenorm, Poseui, KDWPosevariation % % % Copyright 2019 Tim C. Lueth |
BBofPS(ps)- returns the bounding box of a polyshape |
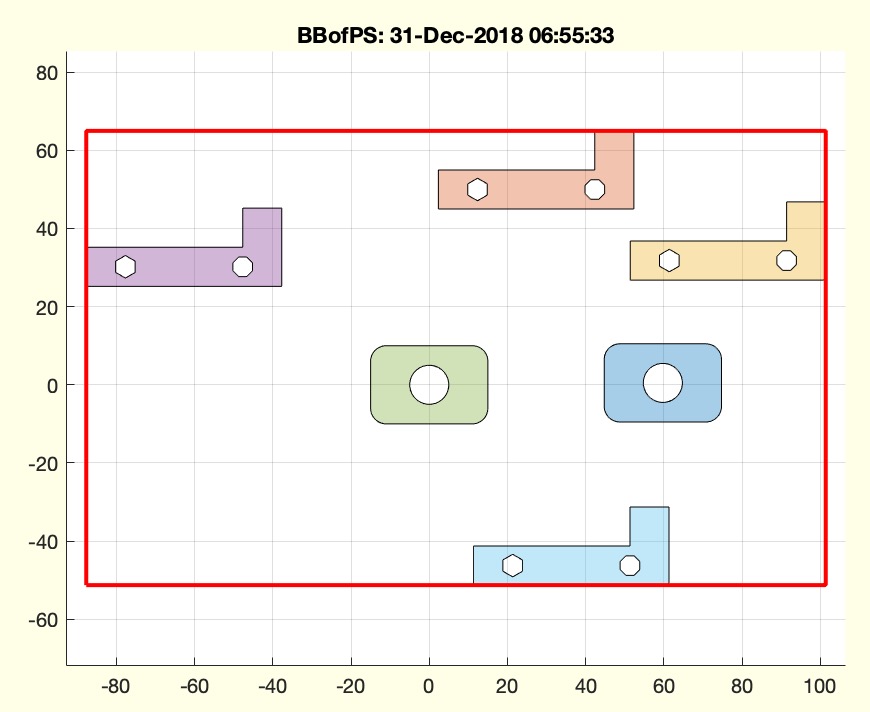 | % BBofPS(ps) - returns the bounding box of a polyshape % (by Tim Lueth, VLFL-Lib, 2018-DEZ-31 as class: CLOSED POLYGON LISTS) % % 2018a - faster than the matlab implementation (Status of: 2018-12-31) % % Introduced first in SolidGeometry 4.4 % % See also: CPLofBB, BBofVL, BBofSG, BBofCPL, BBofSGcutT % % bb=BBofPS(ps) % === INPUT PARAMETERS === % ps: polyshape % === OUTPUT RESULTS ====== % bb: bounding box % % EXAMPLE: % ps=polyshape(CPLsample(33)); plot(ps) % BBofPS(ps) % % See also: CPLofBB, BBofVL, BBofSG, BBofCPL, BBofSGcutT % % % Copyright 2018 Tim C. Lueth |
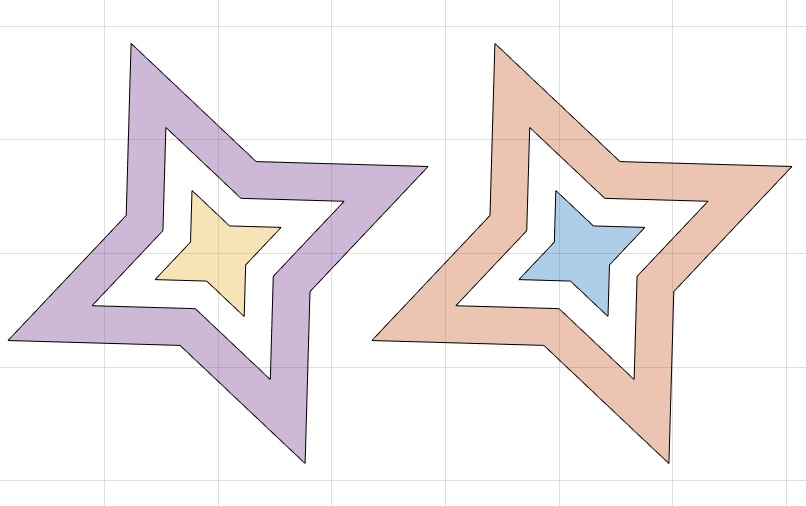
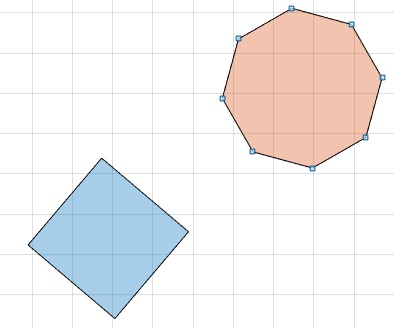
PSanalyze(ps)- classifies the polyshapes regions outer boundaries into equal shapes |
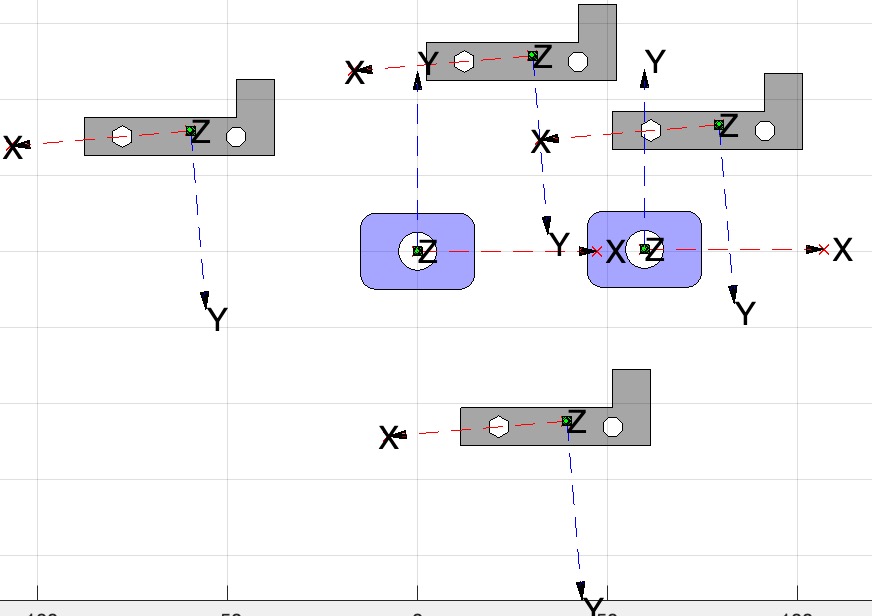 | % PSanalyze(ps) - classifies the polyshapes regions outer boundaries into equal shapes % (by Tim Lueth, VLFL-Lib, 2018-DEZ-30 as class: CLOSED POLYGON LISTS) % % The polyshape is recursively separated into regions. % S.id = identifier % S.T = HT matrix % S.ps = polyshape region % S.cs = polyshape centerted at origin % S.bs = polyshape region outer boundary (Status of: 2019-01-28) % % Introduced first in SolidGeometry 4.4 % % See also: BBofPS, poseofPSanalyze % % S=PSanalyze([ps]) % === INPUT PARAMETERS === % ps: Polyshape % === OUTPUT RESULTS ====== % S: struct containing each region % % EXAMPLE: % SGfigure; load ('fourbar4Pose.mat'); cla; plot(ps); shg % PSanalyze; S=ans % SGfigure; hold on; for i=1:3; CPLplotasPS(PLtransR(CPLsample(34)+rand(1,2)*10,rot(randminv([-pi pi])))), end; PSanalyze % % See also: BBofPS, poseofPSanalyze % % % Copyright 2018-2019 Tim C. Lueth |
class2cell(objs)- converts an array of a class into a cell list of the same type |
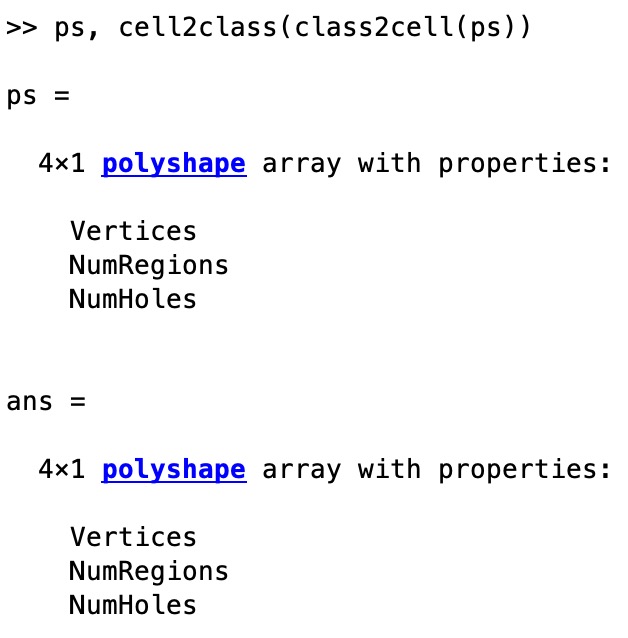 | % class2cell(objs) - converts an array of a class into a cell list of the same type % (by Tim Lueth, VLFL-Lib, 2018-DEZ-30 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.4 % % See also: get, elem2array, arrayof, cell2class, array2cell % % c=class2cell(objs) % === INPUT PARAMETERS === % objs: object array of a class % === OUTPUT RESULTS ====== % c: cell list of the class array % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); ps=PSofgca; ps=regions(ps) % array of polyshape % ps, cell2class(class2cell(ps)) % % See also: get, elem2array, arrayof, cell2class, array2cell % % % Copyright 2018 Tim C. Lueth |
cell2class(cells)- converts a cell list of elements of the same class into an array of this class |
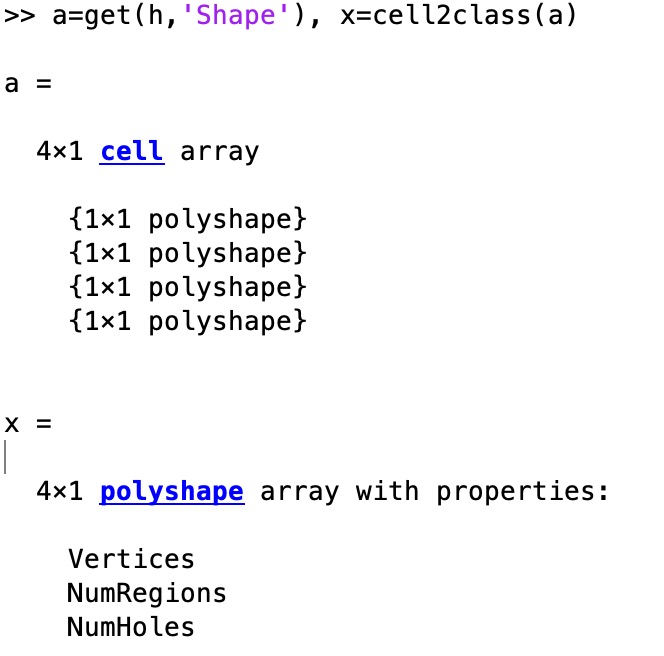 | % cell2class(cells) - converts a cell list of elements of the same class into an array of this class % (by Tim Lueth, VLFL-Lib, 2018-DEZ-30 as class: AUXILIARY PROCEDURES) % % In more and more cases, the get command of matlab returns cell lists of % specific classes, but the methods of those classes are unable to % process cell lists. Therefor this fnctn converts a cell list into an % array of the class type (Status of: 2018-12-30) % % Introduced first in SolidGeometry 4.4 % % See also: get, elem2array, arrayof, class2cell, array2cell % % x=cell2class(cells) % === INPUT PARAMETERS === % cells: cell list of any class type % === OUTPUT RESULTS ====== % x: resulting array of the class type % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); h=findobj(gca,'type','polygon') % a=get(h,'Shape'), x=cell2class(a) % cla; plot(x); shg % % See also: get, elem2array, arrayof, class2cell, array2cell % % % Copyright 2018 Tim C. Lueth |
elem2array(elem)- converts elements of a list into an array |
 | % elem2array(elem) - converts elements of a list into an array % (by Tim Lueth, VLFL-Lib, 2018-DEZ-30 as class: AUXILIARY PROCEDURES) % % ======================================================================= % OBSOLETE (2022-04-30) - USE 'elem2rows, elem2cols' INSTEAD % ======================================================================= % % Some fnctns such as 'findobj' return a cell list of objects as % separated results. Accessing structured properties/methods of those % objects is possible by % a) using the "get command' which returns a cell list for instance % "get(h,'Shape')" % b) use the property name directly similar to a struct, or instance % "h.Shape" % In the second case (b) the property methods is called repeated times % for each element of the object list which returns several individual % results. % This fnctn converts the results list into an array of the same class % type % (Status of: 2022-04-30) % % Introduced first in SolidGeometry 4.4 % % See also: [ elem2rows, elem2cols ] ; squeeze, elem2cols, elem2rows, % get, arrayof, cell2class, class2cell, array2cell % % vec=elem2array([elem]) % === INPUT PARAMETERS === % elem: results list of several elements % === OUTPUT RESULTS ====== % vec: array of same type as elem{1} filled with elem{:} % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); h=findobj(gca,'type','polygon') % h.Shape % creates 4 results % get(h,'Shape') % creates a cell list with 4 entries % elem2array(h.Shape) % converts the 4 results in an class type array with 4 elements % cell2class(get(h,'Shape')) % returns the same result as elem2arry from the get result % % See also: [ elem2rows, elem2cols ] ; squeeze, elem2cols, elem2rows, % get, arrayof, cell2class, class2cell, array2cell % % % Copyright 2018-2022 Tim C. Lueth |
arrayof(cobj,r,c)- returns an array of a class object |
 | % arrayof(cobj,r,c) - returns an array of a class object % (by Tim Lueth, VLFL-Lib, 2018-DEZ-30 as class: LANGUAGE PROCEDURES) % % Some class objects such as polyshape (2017b) are created by simply % using the class name % Nevertheless arrays of such objects have to be created by the repmat % fnctn. % Typically the matlab convention is % arrays for example % zeros(20,3) or ones (10,10,10) or nan (4) % This fnctn support the same conventions for class objects (Status of: % 2018-12-30) % % Introduced first in SolidGeometry 4.4 % % See also: repmat, elem2array, cell2class, class2cell, array2cell % % clarr=arrayof(cobj,[r,c]) % === INPUT PARAMETERS === % cobj: class object % r: rows % c: cols % === OUTPUT RESULTS ====== % clarr: array of class objects % % EXAMPLE: % arrayof(polyshape,1,4) % arrayof(polyshape,2) % arrayof(polyshape,4,1) % % See also: repmat, elem2array, cell2class, class2cell, array2cell % % % Copyright 2018 Tim C. Lueth |
PSregions(PS)- returns the regions of a polyshape |
 | % PSregions(PS) - returns the regions of a polyshape % (by Tim Lueth, VLFL-Lib, 2018-DEZ-30 as class: CLOSED POLYGON LISTS) % % This fnctn extends the concept of regions of a polyshape which is % available only for scalar polyshapes to arrays and cells of polyshape. % SGfigure; CPLplotasPS(CPLsample(14)); ps=PSofgca; ps=regions(ps), % r=regions(ps) % fails! % create polyshape arrays: (Status of: 2018-12-30) % % Introduced first in SolidGeometry 4.4 % % See also: PSofgca % % PSR=PSregions(PS) % === INPUT PARAMETERS === % PS: % === OUTPUT RESULTS ====== % PSR: % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); ps=PSofgca; ps=regions(ps) % array of polyshape % ps, ps=regions(ps); % fails % ps=PSregions(ps) % works % % See also: PSofgca % % % Copyright 2018 Tim C. Lueth |
PSplot(ps,)- plots a polyshape but also a cell list of polyshapes |
 | % PSplot(ps,) - plots a polyshape but also a cell list of polyshapes % (by Tim Lueth, VLFL-Lib, 2018-DEZ-29 as class: VISUALIZATION) % % This fnctn is required since currently the concept of polygon arrays % and polyshape arrays seems to have less methods than the cell concept % isa(ps,'polyshape'), isa(ps,'polygon') (Status of: 2018-12-30) % % Introduced first in SolidGeometry 4.4 % % See also: plot, PLplot, CPLplotasPS % % h=PSplot(ps,[]) % === INPUT PARAMETERS === % ps: polyshape or list of polyshapes % === OUTPUT RESULTS ====== % h: handle to plat, ie. polygons % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); % ps=PSofgca(true) % cla; PSplot(ps) % % See also: plot, PLplot, CPLplotasPS % % % Copyright 2018 Tim C. Lueth |
PSofgca(nocells)- return the polyshapes of the polygons of current axis |
 | % PSofgca(nocells) - return the polyshapes of the polygons of current axis % (by Tim Lueth, VLFL-Lib, 2018-DEZ-29 as class: CLOSED POLYGON LISTS) % % This fnctn is required since currently the concept of polygon arrays % and polyshape arrays seems to have less methods than the cell concept % (Status of: 2018-12-30) % % Introduced first in SolidGeometry 4.4 % % See also: VLFLofgca, VLofgca, SGofgca % % [ps,CPL]=PSofgca([nocells]) % === INPUT PARAMETERS === % nocells: false = separated as cells; true = only on polyspahe % === OUTPUT RESULTS ====== % ps: polyshape of current axis % CPL: closed polygon line of ps % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(34)); % PSofgca % % See also: VLFLofgca, VLofgca, SGofgca % % % Copyright 2018-2019 Tim C. Lueth |
TofPL(PL)- returns a 2D HT matrix for a point list |
 | % TofPL(PL) - returns a 2D HT matrix for a point list % (by Tim Lueth, VLFL-Lib, 2018-DEZ-28 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.4 % % See also: TofR, TofVL, TPL, TofDPhiH, T3ofT2, T3P, T2P, TofP, TofPLpath % % T=TofPL(PL) % === INPUT PARAMETERS === % PL: Point list % === OUTPUT RESULTS ====== % T: 3x3 HT matrix % % EXAMPLE: % TofPL(CPLsample(14)) % % See also: TofR, TofVL, TPL, TofDPhiH, T3ofT2, T3P, T2P, TofP, TofPLpath % % % Copyright 2018-2019 Tim C. Lueth |
array2cell(array)- convert object arrays into cell arrays |
 | % array2cell(array) - convert object arrays into cell arrays % (by Tim Lueth, VLFL-Lib, 2018-DEZ-28 as class: AUXILIARY PROCEDURES) % % % 2018-12-28 by Tim Lueth % fnctn c=array2cell(varargin) % % c=varargin'; % % (Status of: 2018-12-30) % % Introduced first in SolidGeometry 4.4 % % See also: get, elem2array, arrayof, cell2class, class2cell % % c=array2cell([array]) % === INPUT PARAMETERS === % array: arrays of structs % === OUTPUT RESULTS ====== % c: cell list of input values % % EXAMPLE: % a=dir(pwd); array2cell(a.name) % % See also: get, elem2array, arrayof, cell2class, class2cell % % % Copyright 2018-2022 Tim C. Lueth |
CPLofpolyshape(ps,ascell)- creates a CPL from an array of polyshapes |
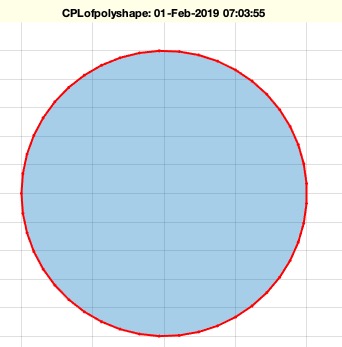 | % CPLofpolyshape(ps,ascell) - creates a CPL from an array of polyshapes % (by Tim Lueth, VLFL-Lib, 2018-DEZ-28 as class: CLOSED POLYGON LISTS) % % for simple polyshapes it is possible to use ps.Vertices but for arrays % of polyshapes, this fnctn is required (Status of: 2019-02-01) % % Introduced first in SolidGeometry 4.4 % % See also: polyshape, CPLofPolygon % % % CPL=CPLofpolyshape(ps,[ascell]) % === INPUT PARAMETERS === % ps: polyshape % ascell: returns polyshape array elements as cell list % === OUTPUT RESULTS ====== % CPL: CPL % % EXAMPLE: % a=polyshape(PLcircle(10)), CPLofpolyshape(a) % % a=polyshape([PLcircle(4);nan nan;PLcircle(3)+[3 3]]); a=regions(a) % CPLofpolyshape(a) % CPLofpolyshape(a,true) % % See also: polyshape, CPLofPolygon % % % % Copyright 2018-2019 Tim C. Lueth |
uipolygoncontextmenu- create the ui context menu for polygon |
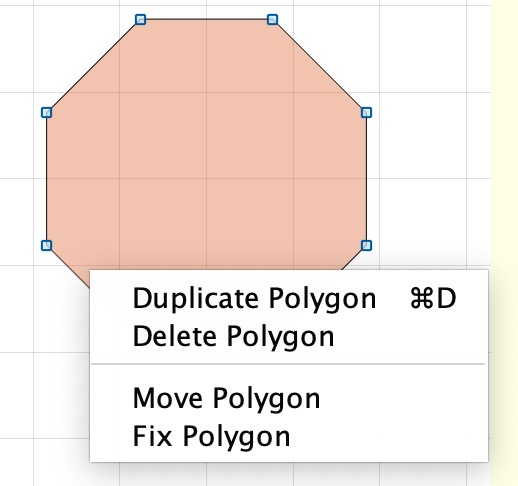 | % uipolygoncontextmenu - create the ui context menu for polygon % (by Tim Lueth, VLFL-Lib, 2018-DEZ-27 as class: USER INTERFACE) % % This fnctn makes shure that the ui contect menu for polygons is the % same for all polygons % This fnctn is used by uipolygonSelectWindowButtonUp % (Status of: 2018-12-28) % % Introduced first in SolidGeometry 4.4 % % See also: uipolygonSelectWindowButtonUp, % uipolygonmoveWindowButtonDownFcn, uipolygonselect % % cm=uipolygoncontextmenu % === OUTPUT RESULTS ====== % cm: context menu % % EXAMPLE: % h=findobj(gca,'Type','polygon','selected','on'); % cm=uipolygoncontextmenu; set(h,'UIContextMenu',cm); % % % % See also: uipolygonSelectWindowButtonUp, % uipolygonmoveWindowButtonDownFcn, uipolygonselect % % % Copyright 2018 Tim C. Lueth |
uipolygonSelectWindowButtonUp(srch,cbdat)- MAIN CALLBACK FUNCT for a figure to make polygons movable if rotate3d is off |
 | % uipolygonSelectWindowButtonUp(srch,cbdat) - MAIN CALLBACK FUNCT for a figure to make polygons movable if rotate3d is off % (by Tim Lueth, VLFL-Lib, 2018-DEZ-27 as class: USER INTERFACE) % % The concepts works as follows if rotate3d is off (mandatory): % This callback fnctn uipolygonSelectWindowButtonUp is the Mouse Button % Up fnctn and % - deselects all polygons in the current figure BY CLICKING SOMEWHERE % WHERE THERE IS NO POLYGON % - select all polygons in the current figure BY DOUBLE CLICKING NEAR % POLYGONS % Selecting a polygon means: % 1. show the selected mode; points a marked % 2. Attach the fnctn uipolygonmoveWindowButtonDownFcn as Mouse Button % Down fnctn to those polygons % 3. A UIContextMenu is attached inside the fnctn % uipolygonmoveWindowButtonDownFcn to polygons % Deselecting a polygon means: % 1. show the unselected mode; no points are marked % 2. Remove the fnctn uipolygonmoveWindowButtonDownFcn as Mouse Button % Down fnctn of those polygons % 3. Still have the UIContextMenu existing % HOW TO USE THESE FNCTNS % Just add this fnctn as Button up fnctn to a figure window AFTER % deselecting rotate3d % rotate3d off; % set(gcf,'WindowButtonUpFcn',@uipolygonSelectWindowButtonUp) % Now, it is possible to select and move polygons. % FUTURE: % a) This concept could be extended to CPLs and CVL and SG % b) the UIContextMenu could be extended to modify the shape by % stretching/shrinking a polygon % c) the UIContextMenu could be extended to add or remove points of a % polygon % d) the UIContextMenu could be extended to move points of a polygon % (Status of: 2018-12-28) % % Introduced first in SolidGeometry 4.4 % % See also: uipolygoncontextmenu, uipolygonmoveWindowButtonDownFcn % % uipolygonSelectWindowButtonUp(srch,cbdat) % === INPUT PARAMETERS === % srch: source handle - not used yet % cbdat: call back data - not used yet % % EXAMPLE: % SGfigure; hold on; plot(polyshape(PLcircle(10,4))); plot(polyshape(PLcircle(10,8)+20)); % rotate3d off; set(gcf,'WindowButtonUpFcn',@uipolygonSelectWindowButtonUp) % Now double click works % % See also: uipolygoncontextmenu, uipolygonmoveWindowButtonDownFcn % % % Copyright 2018-2020 Tim C. Lueth |
uipolygonmoveWindowButtonDownFcn(h,st)- callback fnct and interactive fnct to move and rotate polygons and to attach ui context menu |
 | % uipolygonmoveWindowButtonDownFcn(h,st) - callback fnct and interactive fnct to move and rotate polygons and to attach ui context menu % (by Tim Lueth, VLFL-Lib, 2018-DEZ-26 as class: USER INTERFACE) % % This fnctn is typically installed automatically as callback fnctn for % polygons by the figure fnctn uipolygonSelectWindowButtonUp. % % This fnctn can be used to move a polygon from the command line or to % attach it as callback fnctn to a polygon (Status of: 2018-12-28) % % Introduced first in SolidGeometry 4.4 % % See also: uipolygonSelectWindowButtonUp, uipolygoncontextmenu, % uipolygonselect % % [h,hp]=uipolygonmoveWindowButtonDownFcn(h,st) % === INPUT PARAMETERS === % h: calling fnctn % st: calling event % === OUTPUT RESULTS ====== % h: handle to polygon % hp: gandle to all polygons % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); h=uipolygonselect([0 0 ]); set(h,'Selected','on'); % h=findobj(gca,'Type','polygon','selected','on'); set(h,'ButtonDownFcn',@uipolygonmoveWindowButtonDownFcn); % rotate3d off % % See also: uipolygonSelectWindowButtonUp, uipolygoncontextmenu, % uipolygonselect % % % Copyright 2018 Tim C. Lueth |
uipolygonselect(p)- returns the handles of the polygon near a point or the cursor position |
 | % uipolygonselect(p) - returns the handles of the polygon near a point or the cursor position % (by Tim Lueth, VLFL-Lib, 2018-DEZ-26 as class: USER INTERFACE) % % This fnctn can be called to get the handles of polygons near the cursor % or a point. % It is possible to call the fnctn manually similar to select3d by % ginput(1); uipolygonselect % This fnctn is used in may callback fnctns (Status of: 2018-12-28) % % Introduced first in SolidGeometry 4.4 % % See also: uipolygonSelectWindowButtonUp, uipolygoncontextmenu, % uipolygonmoveWindowButtonDownFcn % % [h,hp,pins,pnv]=uipolygonselect(p) % === INPUT PARAMETERS === % p: explicit point or use cursor position if p is empty % === OUTPUT RESULTS ====== % h: handle of relative polygons % hp: handle of all polygons % pins: polygons in which p is located % pnv: polygons, pi is near a vertex % % EXAMPLE: % SGfigure; CPLplotasPS(CPLsample(14)); % uipolygonselect([10 -20]) % nothing to select % uipolygonselect([10 -2]) % inside % uipolygonselect % Checks current cursor position % ginput(1); uipolygonselect % asks first for crosshair selction % % % See also: uipolygonSelectWindowButtonUp, uipolygoncontextmenu, % uipolygonmoveWindowButtonDownFcn % % % Copyright 2018-2020 Tim C. Lueth |
CPLofPolygon(h,ascell);- returns the CPL of a graphics object type polygon |
 | % CPLofPolygon(h,ascell); - returns the CPL of a graphics object type polygon % (by Tim Lueth, VLFL-Lib, 2018-DEZ-26 as class: CLOSED POLYGON LISTS) % % Auxiliary fnctn to convert the polygon graphics object handle into a % CPL. Used in interactive fnctns such as uipolygoncontextmenu. (Status % of: 2019-01-31) % % Introduced first in SolidGeometry 4.4 % % See also: CPLofpolyshape, uipolygoncontextmenu % % CPL=CPLofPolygon(h,[ascell]); % === INPUT PARAMETERS === % h: handle to polygon % ascell: if return as cell list or as array % === OUTPUT RESULTS ====== % CPL: Closed Polygon line % % EXAMPLE: % h=plot(polyshape(PLcircle(4))) % CPLofPolygon(h) % h=plot(polyshape([PLcircle(4);nan nan; PLcircle(4)+[5 5]])); shg % CPLofPolygon(h) % % See also: CPLofpolyshape, uipolygoncontextmenu % % % Copyright 2018-2019 Tim C. Lueth |
CPLplotasPS(CPL,simp)- plots a CPL as polyshape using the plot(polyshape(CPL)) command |
 | % CPLplotasPS(CPL,simp) - plots a CPL as polyshape using the plot(polyshape(CPL)) command % (by Tim Lueth, Video-Lib, 2018-DEZ-26 as class: CLOSED POLYGON LISTS) % % ======================================================================= % OBSOLETE (2022-01-30) - USE 'CPSplot' INSTEAD % ======================================================================= % % plots as CPL as polyshape (simplify==false) instead of a contour line % (Status of: 2019-02-16) % % Introduced first in SolidGeometry 4.4 % % See also: [ CPSplot ] ; CPLanimateTL, CPLplot, CPLfaceplot, % CPLplotregions, CPLplotcolors, CPLplotinout % % h=CPLplotasPS(CPL,[simp]) % === INPUT PARAMETERS === % CPL: closed polygon line % simp: true for simplify; false=unmodified; default is true; % === OUTPUT RESULTS ====== % h: handle % % EXAMPLE: SGfigure; CPLplotasPS(CPLsample(14)); CPLplotasPS(CPLsample(16)); % % See also: [ CPSplot ] ; CPLanimateTL, CPLplot, CPLfaceplot, % CPLplotregions, CPLplotcolors, CPLplotinout % % % Copyright 2018-2022 Tim C. Lueth |
CPLplotinout(CPL,col)- plots the CPLs in colors depending in the enclosure level |
 | % CPLplotinout(CPL,col) - plots the CPLs in colors depending in the enclosure level % (by Tim Lueth, VLFL-Lib, 2018-DEZ-23 as class: CLOSED POLYGON LISTS) % % plots the enclosing level using the colorstring 'rbgymcwk' % % (Status of: 2019-07-06) % % Introduced first in SolidGeometry 4.4 % % See also: CPLplot, CPLplotcolors, CPLplotregions, CPLplotcwccw % % h=CPLplotinout(CPL,[col]) % === INPUT PARAMETERS === % CPL: Closed Polygon line % col: line type; first char (color) is ignored % === OUTPUT RESULTS ====== % h: handle to plot % % EXAMPLE: % SGfigure; CPLplotinout(CPLsample(14)) % SGfigure; CPLplotinout(CPLsample(14),'?-.') % SGfigure; CPLplotinout(CPLsample(14),'?-.',4) % % See also: CPLplot, CPLplotcolors, CPLplotregions, CPLplotcwccw % % % Copyright 2018-2019 Tim C. Lueth |
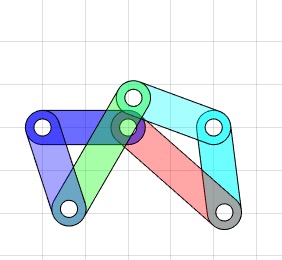
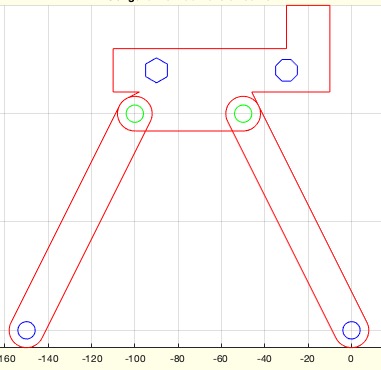
exp_2018_12_22_CPL2CPLchain(CPL);- EXPERIMENT to analyze a CPL to identify links and revolute joints of a mechanism |
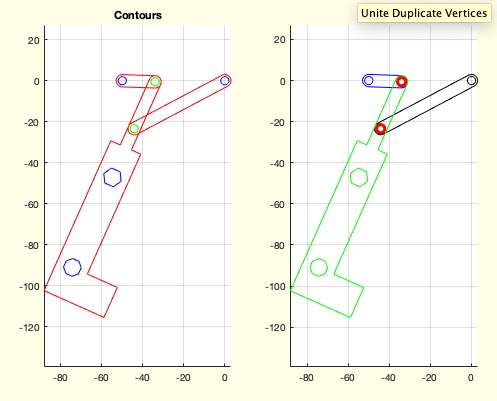 | % exp_2018_12_22_CPL2CPLchain(CPL); - EXPERIMENT to analyze a CPL to identify links and revolute joints of a mechanism % (by Tim Lueth, VLFL-Lib, 2018-DEZ-22 as class: EXPERIMENTS) % % This fnctn takes over the 2D sketch of a joint kinematics as CPL and % analyzes the pivot points from the overlapping contours as well as the % kinematic chain as edge list and the contours of three pins. % The result are four strutures % CCPL contains the contours of the links = [Outer contour; nan nan; base % contour; nan nan; joint contour] % EL contains a sorted edge list of the links that represents the % kinematic chain % DCPL it the shape of the connecting axis % lm are the centers of the axis (Status of: 2018-12-24) % % Introduced first in SolidGeometry 4.4 % % [CCPL,EL,DCPL,lm]=exp_2018_12_22_CPL2CPLchain([CPL]); % === INPUT PARAMETERS === % CPL): CLosed Polygon line % === OUTPUT RESULTS ====== % CCPL: cell list of link structures % EL: edge list to connect the links % DCPL: shape of the connecting joints % lm: centers of the contours % % EXAMPLE: % [~,~,~,CPL]=CPLfourbarlinkage('','','','',[0.2 20],'',CPLsample(34)*10); % exp_2018_12_22_CPL2CPLchain(CPL) % % % Copyright 2018 Tim C. Lueth |
exp_2018_12_20_cuttingshape(k,rp,b,CPLT,CPLX)- EXPERIMENT to automatically cut a shape to fit into another shape during 4bar movement |
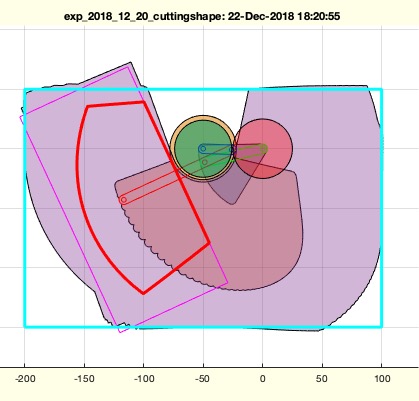 | % exp_2018_12_20_cuttingshape(k,rp,b,CPLT,CPLX) - EXPERIMENT to automatically cut a shape to fit into another shape during 4bar movement % (by Tim Lueth, VLFL-Lib, 2018-DEZ-20 as class: EXPERIMENTS) % % This fnctn rotates a Contour CPLT with a four-bar-linkage and cuts the % contour so that a specified polygon CPLX is not left. % (Status of: 2018-12-22) % % Introduced first in SolidGeometry 4.4 % % See also: exp_2012_12_16_plan_2r_rob.mlx, exp_2018_12_18_walking, % exp_2018_12_19_walkingshape % % CPLT=exp_2018_12_20_cuttingshape([k,rp,b,CPLT,CPLX]) % === INPUT PARAMETERS === % k: position along the couple length of POI [0..1, 0..1] % rp: radius relation to l1+l2 % b: base point [0 .. 1) with respect to minmal and maximal distance % CPLT: Moving Contour attached to POI % CPLX: Crossing Contour that limits the shape of CPLT % === OUTPUT RESULTS ====== % CPLT: Optimized Contour that with maximum area within CPLX % % EXAMPLE: % exp_2018_12_20_cuttingshape; a=ans % exp_2018_12_20_cuttingshape('','','',a); b=ans % % See also: exp_2012_12_16_plan_2r_rob.mlx, exp_2018_12_18_walking, % exp_2018_12_19_walkingshape % % % Copyright 2018 Tim C. Lueth |
im2vec(Iset)- simply converts/reshapes an image into a 1 x n vector |
 | % im2vec(Iset) - simply converts/reshapes an image into a 1 x n vector % (by Tim Lueth, VLFL-Lib, 2018-DEZ-19 as class: IMAGES) % % used for polynomical classificators (Status of: 2019-02-01) % % Introduced first in SolidGeometry 4.4 % % Vec=im2vec(Iset) % === INPUT PARAMETERS === % Iset: Image % === OUTPUT RESULTS ====== % Vec: Vector % % EXAMPLE: % imread('corn.tif',3); I=ans; whos I % V=im2vec(I); % whos V % % % Copyright 2018-2021 Tim C. Lueth |
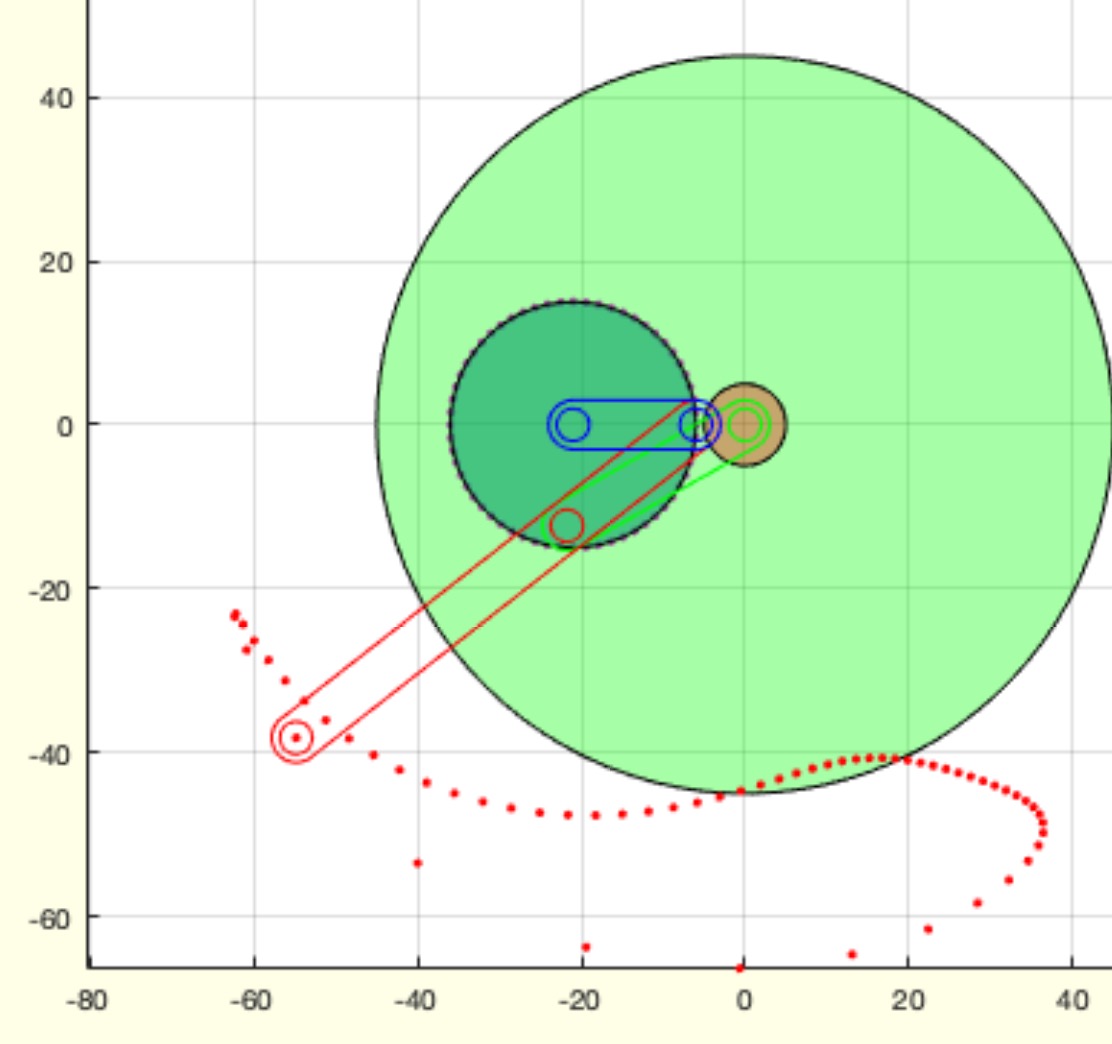
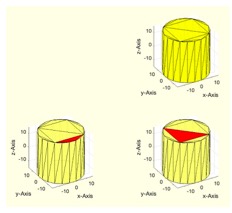
exp_2018_12_19_walkingshape(k,rp,b,CPLT)- EXPERIMENT to show the swept hull of the links |
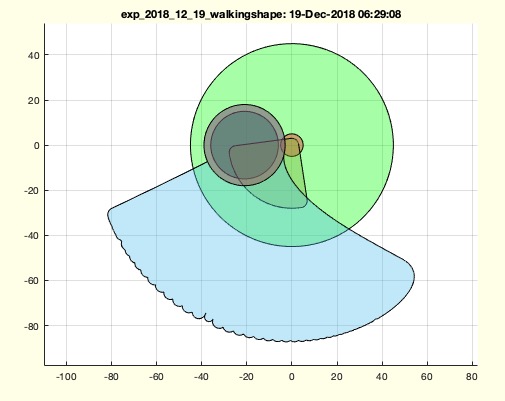 | % exp_2018_12_19_walkingshape(k,rp,b,CPLT) - EXPERIMENT to show the swept hull of the links % (by Tim Lueth, VLFL-Lib, 2018-DEZ-19 as class: EXPERIMENTS) % % This fnctn shows the swept area of a circumferential four bar linkage. % (Status of: 2018-12-22) % % Introduced first in SolidGeometry 4.4 % % See also: exp_2018_12_18_walking, exp_2018_12_20_cuttingshape, % exp_2018_12_22_CPL2CPLchain % % [A,B,C,D,a,b,c,d]=exp_2018_12_19_walkingshape([k,rp,b,CPLT]) % === INPUT PARAMETERS === % k: position of the foot relative to the 4bar % rp: radius of the crank relative to link 1 % b: position of base between minimum and maximum value % CPLT: Contour attached to c % === OUTPUT RESULTS ====== % A: Area touched by link 1 % B: Area touched by link 2 % C: Area touched by crank % D: Area touched by contour CPLT % a: % b: % c: % % EXAMPLE: % exp_2018_12_19_walkingshape % [~,~,~,~,a,b,c,d,]=exp_2018_12_19_walkingshape('',0.4) % exp_2018_12_22_CPL2CPLchain([a;nan nan;c;nan nan;CPLmeltbool([b;nan nan;d])]); % % See also: exp_2018_12_18_walking, exp_2018_12_20_cuttingshape, % exp_2018_12_22_CPL2CPLchain % % % Copyright 2018 Tim C. Lueth |
exp_2018_12_18_walking(k,r)- Walking fourbar |
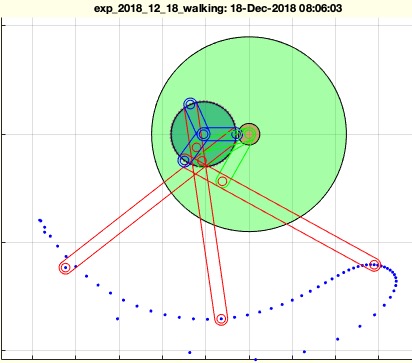 | % exp_2018_12_18_walking(k,r) - Walking fourbar % (by Tim Lueth, VLFL-Lib, 2018-DEZ-18 as class: EXPERIMENTS) % % This fnctn shows the movement of the crosspoint (POI) of a % four-bar-linkage (Status of: 2018-12-22) % % Introduced first in SolidGeometry 4.4 % % See also: exp_2012_12_16_plan_2r_rob.mlx, exp_2018_12_19_walkingshape, % exp_2018_12_20_cuttingshape % % exp_2018_12_18_walking([k,r]) % === INPUT PARAMETERS === % k: position of the foot relative to the 4bar % r: radius of the crank relative to link 1 % % EXAMPLE: % exp_2018_12_18_walking(-4) % % See also: exp_2012_12_16_plan_2r_rob.mlx, exp_2018_12_19_walkingshape, % exp_2018_12_20_cuttingshape % % % Copyright 2018 Tim C. Lueth |
CPLfourbarlinkage(P1,P2,P3,P4,P5,R12,CPLX,dw)- creates for a specified fourbar linkage the cpls for crank, coupler, swing |
 | % CPLfourbarlinkage(P1,P2,P3,P4,P5,R12,CPLX,dw) - creates for a specified fourbar linkage the cpls for crank, coupler, swing % (by Tim Lueth, VLFL-Lib, 2018-DEZ-17 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.4 % % See also: invkinplan2, exp_2012_12_16_plan_2r_rob.mlx, % exp_2018_12_18_walking, exp_2018_12_19_walkingshape, % exp_2018_12_20_cuttingshape % % [CPL1,CPL2,CPLR,CPL,R12o,CPLX,TX,dt]=CPLfourbarlinkage([P1,P2,P3,P4,P5, % R12,CPLX,dw]) % === INPUT PARAMETERS === % P1: Position of Crank Center % P2: Position of TCP (end of coupler) % P3: Position of link 1 (start of coupler) % P4: Position of Base of link 1 (2R robot base) % P5: Position of POI (0=P3 1= P2) or [POI delta x] % R12: Ro and Ri Outer and inner Radius % CPLX: Contour of the Shape linked to POI % dw: optional turing angle % === OUTPUT RESULTS ====== % CPL1: CPL of swing, 2R-robot link 1 % CPL2: CPL of coupler, 2R-robot link 2 % CPLR: CPL of crank, radial position specification % CPL: complete contour for sweeping % R12o: [Ro and Ri] Outer and inner Radius % CPLX: CPL of Final Contour % TX: Final transformation matrix % % EXAMPLE: % CPLfourbarlinkage; % CPLfourbarlinkage('','','','',0.5); % CPLfourbarlinkage('','','','',-3); % CPLfourbarlinkage('','','','',[0.5 20]); % CPLfourbarlinkage('','','','',[0.5 20],'',CPLsample(34)*10); % % % See also: invkinplan2, exp_2012_12_16_plan_2r_rob.mlx, % exp_2018_12_18_walking, exp_2018_12_19_walkingshape, % exp_2018_12_20_cuttingshape % % % Copyright 2018-2019 Tim C. Lueth |
exp_2018_12_16_plan_2r_rob- EXPERIMENT to explain relationship between planar 2R-robot and fourbar linkage |
 | % exp_2018_12_16_plan_2r_rob - EXPERIMENT to explain relationship between planar 2R-robot and fourbar linkage % (by Tim Lueth, VLFL-Lib, 2018-DEZ-16 as class: TUTORIAL) % % This LiveScript explains the movements of a four-bar-linkage as the % movement of a planar 2R robot that has a rotating joint at the % base/frame point and between each of the two links. In order for the % robot to become a four-bar linkage, the end point (TCP) of the robot % must be forced onto a circular path. This requires a rotating crank. % The TCP of the robot rotates on a circular path and the second link of % the robot corresponds to the coupling of the four bar linkage. (Status % of: 2018-12-22) % % Introduced first in SolidGeometry 4.4 % % See also: exp_2012_12_16_plan_2r_rob.mlx, exp_2018_12_18_walking, % exp_2018_12_19_walkingshape, exp_2018_12_20_cuttingshape % % exp_2018_12_16_plan_2r_rob % % See also: exp_2012_12_16_plan_2r_rob.mlx, exp_2018_12_18_walking, % exp_2018_12_19_walkingshape, exp_2018_12_20_cuttingshape % % % Copyright 2018 Tim C. Lueth |
randT(d)- return a random T matrix |
 | % randT(d) - return a random T matrix % (by Tim Lueth, VLFL-Lib, 2018-DEZ-08 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.4 % % See also: randminv % % T=randT([d]) % === INPUT PARAMETERS === % d: distance from original; default is 10..20 % === OUTPUT RESULTS ====== % T: HT Matrix % % EXAMPLE: % randT % % See also: randminv % % % Copyright 2018 Tim C. Lueth |
SGshowcolors (n)- shows different colors to understand how to set rgb values |
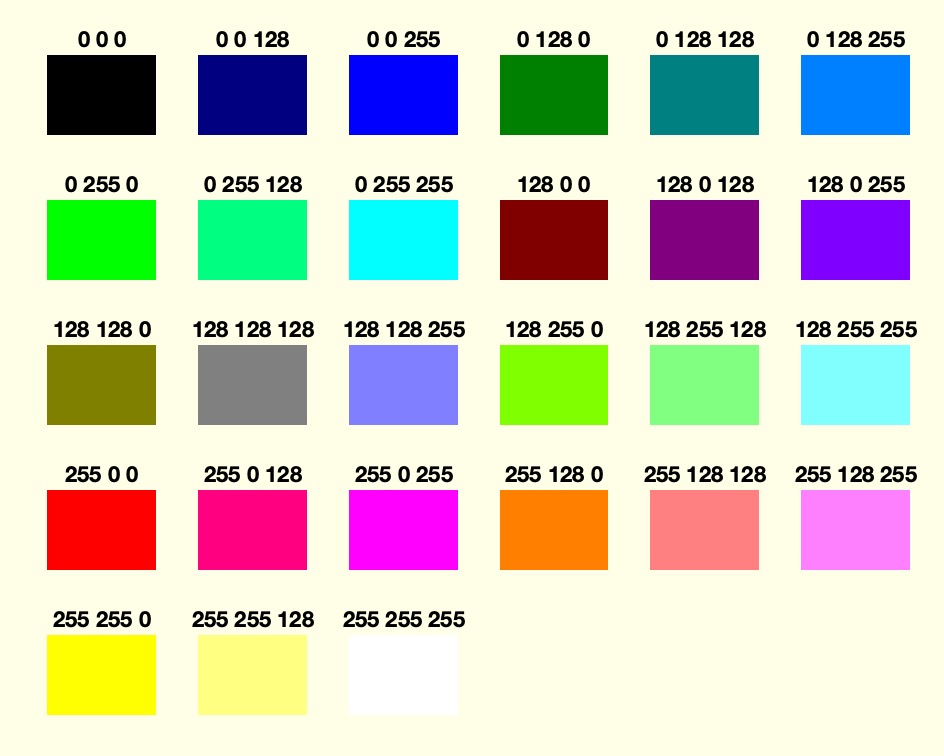 | % SGshowcolors (n) - shows different colors to understand how to set rgb values % (by Tim Lueth, VLFL-Lib, 2018-DEZ-03 as class: VISUALIZATION) % % This fnctn was more or less to test different colors of SGwrtiteSTL % (Status of: 2018-12-04) % % Introduced first in SolidGeometry 4.4 % % See also: camlightTL, VLFLplotlight, SGshadelight, nofcolmap % % SGshowcolors(n) % === INPUT PARAMETERS === % n: % % EXAMPLE: SGshowcolors (2) % SGshowcolors (3) % SGshowcolors (4) % % See also: camlightTL, VLFLplotlight, SGshadelight, nofcolmap % % % Copyright 2018-2020 Tim C. Lueth |
VLFL_EXP46- TUTORIAL 46 - Publishable Tutorial for creating a planetary gear using SGofCPLcommand |
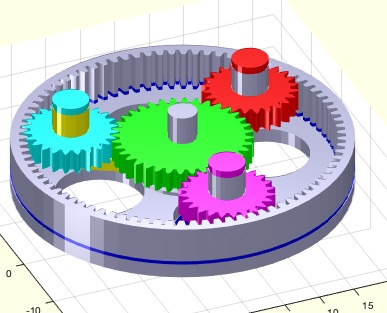 | % VLFL_EXP46 - TUTORIAL 46 - Publishable Tutorial for creating a planetary gear using SGofCPLcommand % (by Yilun Sun, VLFL-Lib, 2018-NOV-30 as class: TUTORIAL) % % Creates a planetary gear using the Solid Geometry Coding Language % (SGC-Language). The tutorial was created by Yilun Sun. % (Status of: 2018-12-12) % % Introduced first in SolidGeometry 4.4 % % See also: SGofCPLcommand % % VLFL_EXP46 % % See also: SGofCPLcommand % |
SGreadOBJ(FName,mag,check)- reads in an OBJ file |
 | % SGreadOBJ(FName,mag,check) - reads in an OBJ file % (by Tim Lueth, VLFL-Lib, 2018-NOV-30 as class: FILE HANDLING) % % Simply uses VLFLreadOBJ % Since there are different formats in OBJ files % currently only the format % f v1 v2 v3 % and f v1/vn v2/vn v3/vn % and f v1//vn v2//vn v3//vn % are supported (Status of: 2018-12-03) % % Introduced first in SolidGeometry 4.4 % % See also: SGreadSTL, SGwriteSTL, VLFLwriteSTL, VLFLreadSTL, VLFLreadOBJ % % [SG,H,AbC,FName]=SGreadOBJ([FName,mag,check]) % === INPUT PARAMETERS === % FName: File Name % mag: magnification; default is 1 % check: checker; default is false % === OUTPUT RESULTS ====== % SG: Solid Geometry % H: Colors, not used in SG-Lib 4.7 % AbC: Colors, not used in SG-Lib 4.7 % FName: File Name, added in SG-Lib 4.7 % % See also: SGreadSTL, SGwriteSTL, VLFLwriteSTL, VLFLreadSTL, VLFLreadOBJ % % % Copyright 2018-2019 Tim C. Lueth |
rgbofall(x)- return all different methods of matlab into a rgb set as type double |
 | % rgbofall(x) - return all different methods of matlab into a rgb set as type double % (by Tim Lueth, VLFL-Lib, 2018-NOV-29 as class: VISUALIZATION) % % Introduced first in SolidGeometry 4.4 % % See also: rgb2char, char2rgb, rgb2bgr16 % % rgb=rgbofall(x) % === INPUT PARAMETERS === % x: input character 'b' or [255 0 0] etc. % === OUTPUT RESULTS ====== % rgb: rgb value between 0 and 1 % % EXAMPLE: % rgbofall('y') % rgbofall(['y','g']) % rgbofall([255 0 64]) % % See also: rgb2char, char2rgb, rgb2bgr16 % % % Copyright 2018 Tim C. Lueth |
bgr162rgb(AbC)- converts a 16 Bit AbC color code (BGR 3 x 5 + 1 Bit) into a color vector [R G B] 3 x 8 Bit |
 | % bgr162rgb(AbC) - converts a 16 Bit AbC color code (BGR 3 x 5 + 1 Bit) into a color vector [R G B] 3 x 8 Bit % (by Tim Lueth, VLFL-Lib, 2018-NOV-29 as class: FILE HANDLING) % % Used for READING COLORED STL FILES % Support of VisCAM and SolidView Colors as attribute by Byte % bits 0 to 4 are the intensity level for blue (0 to 31), % bits 5 to 9 are the intensity level for green (0 to 31), % bits 10 to 14 are the intensity level for red (0 to 31), % bit 15 is 1 if the color is valid, or 0 if the color is not valid (as % with normal STL files). % The Company Materialize defined a color code for the BINARY STL format % that exist only in binary STL files. Unfortunately is wasn't clear from % left to right or right to left. Therefor the common used Software % Meshlab does interpret the colors other than Materialize Software. % In the SG-Lib this is handled by swiching the Facet Colors for RED and % BLUE channel. FC=FC(:,[3 2 1]) (Status of: 2019-07-03) % % Introduced first in SolidGeometry 4.4 % % See also: rgb2bgr16 % % rgb=bgr162rgb(AbC) % === INPUT PARAMETERS === % AbC: List of "Attribute by Count" or BRG16Bit code % === OUTPUT RESULTS ====== % rgb: List of Matlab RGB Values % % EXAMPLE: % a=rgb2bgr16('m'), b=bgr162rgb(a), rgb2char(b*255) % a=rgb2bgr16([255 0 0]), b=bgr162rgb(a), rgb2char(b*255) % a=rgb2bgr16([0.1 0.9 1.0]) % % % See also: rgb2bgr16 % % % Copyright 2018-2019 Tim C. Lueth |
SGshadelight(nr)- sets shading and lightinhg |
 | % SGshadelight(nr) - sets shading and lightinhg % (by Tim Lueth, VLFL-Lib, 2018-NOV-29 as class: AUXILIARY PROCEDURES) % % In contrast to other calls, this fnctns shows an example result only if % there is an output results % For face coloring and shading only the combination values 1, 2, 4 are % recommended. % Interpolation and Gouraud shading create problems with coulored faces % and are useful only in combination with colored vertices. (Status of: % 2020-07-03) % % Introduced first in SolidGeometry 4.4 % % See also: camlightTL, VLFLplotlight, SGshowcolors, rotate3dlight % % nr=SGshadelight(nr) % === INPUT PARAMETERS === % nr: 1..9 for different shadings % === OUTPUT RESULTS ====== % nr: use less parameter; used only for creating an example result % % EXAMPLE: A=SGshadelight(4) % % See also: camlightTL, VLFLplotlight, SGshowcolors, rotate3dlight % % % Copyright 2018-2020 Tim C. Lueth |
rgb2bgr16(RGB)- converts a RGB 3 x 8 Bit color into a BGR 3 x 5 + 1 Bit = 16 Bit Value for STL attribute by color values |
 | % rgb2bgr16(RGB) - converts a RGB 3 x 8 Bit color into a BGR 3 x 5 + 1 Bit = 16 Bit Value for STL attribute by color values % (by Tim Lueth, VLFL-Lib, 2018-NOV-28 as class: VISUALIZATION) % % Used for WRITING COLORED STL FILES % Support of VisCAM and SolidView Colors as attribute by Byte % bits 1 to 5 are the intensity level for blue (0 to 31), % bits 6 to 10 are the intensity level for green (0 to 31), % bits 11 to 15 are the intensity level for red (0 to 31), % bit 16 is 1 if ONE color is used, or 0 if the faces color are used. % SG-Lib 4.7 with support of Yannick Krieger (Status of: 2019-07-03) % % Introduced first in SolidGeometry 4.4 % % See also: SGwriteSTL, SGwriteVRML, char2rgb, rgb2char, bgr162rgb % % bgr16=rgb2bgr16(RGB) % === INPUT PARAMETERS === % RGB: [0..255 0..255 0.255] or 'r', 'y', 'b' etc. % === OUTPUT RESULTS ====== % bgr16: Attribute by Count Value 16 Bit % % EXAMPLE: % a=rgb2bgr16('m'), b=bgr162rgb(a), rgb2char(b*255) % a=rgb2bgr16([255 0 0]), b=bgr162rgb(a), rgb2char(b*255) % a=rgb2bgr16([0.1 0.9 1.0]) % % % See also: SGwriteSTL, SGwriteVRML, char2rgb, rgb2char, bgr162rgb % % % Copyright 2018-2019 Tim C. Lueth |
SGwriteVRML(SG,FNAME,ONAME,vcol)- Writen an STL Geometry in a VRML File Format. |
 | % SGwriteVRML(SG,FNAME,ONAME,vcol) - Writen an STL Geometry in a VRML File Format. % (by Tim Lueth & Alexandra Mercader, VLFL-Lib, 2018-NOV-27 as class: % FILE HANDLING) % % This fnctn was required by Alexandra Mercader, to use the3-Printer of % 2006 in combination with the starch powder and colored binder liquids. % This printer is not able to use OBJ or STL Files that support the % "materialize color convention" for integration color information into % the geometries. % The problem of using matlabs STL2vrml convter could be that this % "materialize color convention" is may be not convertet. Therefor, the % need could be to write the vrml exporter to integrate colors and many % other features that are supported by VRML but not by STL such as % separation of differeet solids. % Matlab's stl2vrml converter comes from humusoft that made the product % orbisnap % On mac there is view3dscene-3.15.0-macosx available (Status of: % 2018-11-28) % % Introduced first in SolidGeometry 4.4 % % See also: SGwriteSTL % % fname=SGwriteVRML(SG,[FNAME,ONAME,vcol]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % FNAME: Optional Filename % ONAME: optional Solid name; default is by username % vcol: optional Color for the solid % === OUTPUT RESULTS ====== % fname: % % EXAMPLE: % A=SGbox([30,20,10]); A.col='g'; A.alpha=0.4; A % fname=SGwriteVRML(A) % openbydoubleclick(fname) % % See also: SGwriteSTL % % % Copyright 2018 Tim C. Lueth |
char2rgb(c)- returns a RGB value from a color character |
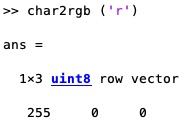 | % char2rgb(c) - returns a RGB value from a color character % (by Tim Lueth, VLFL-Lib, 2018-NOV-26 as class: VISUALIZATION) % % SG-Lib 4.5 supports list of colors (Status of: 2019-01-30) % % Introduced first in SolidGeometry 4.4 % % See also: rgb2char, rgb2bgr16 % % % rgb=char2rgb(c) % === INPUT PARAMETERS === % c: color character % === OUTPUT RESULTS ====== % rgb: [R G B] color % % EXAMPLE: % char2rgb('r') % char2rgb('krgbw') % % See also: rgb2char, rgb2bgr16 % % % % Copyright 2018-2019 Tim C. Lueth |
rgb2char(RGB)- returns a color character from an RGB value |
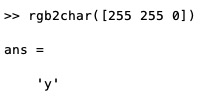 | % rgb2char(RGB) - returns a color character from an RGB value % (by Tim Lueth, VLFL-Lib, 2018-NOV-26 as class: VISUALIZATION) % % SG-Lib 4.5 supports list of colors (Status of: 2019-01-30) % % Introduced first in SolidGeometry 4.4 % % See also: char2rgb, rgb2bgr16 % % c=rgb2char(RGB) % === INPUT PARAMETERS === % RGB: [R G B] color % === OUTPUT RESULTS ====== % c: color character % % EXAMPLE: % rgb2char([255 255 0]) % rgb2char(char2rgb('krgbw')) % % See also: char2rgb, rgb2bgr16 % % % Copyright 2018-2019 Tim C. Lueth |
VLFL_EXP45- Tutorial to demonstrate the power of SGofCPLcommand |
 | % VLFL_EXP45 - Tutorial to demonstrate the power of SGofCPLcommand % (by Tim Lueth, VLFL-Lib, 2018-NOV-25 as class: TUTORIAL) % % Tutorial zum Demonstrieren der Leistungsfähigkeit der Solid Geometry % Coding Language - % SGofCPLcommand, VLFL_EXP46 (Status of: 2018-12-12) % % Introduced first in SolidGeometry 4.4 % % See also: SGofCPLcommand, VLFL_EXP46 % % VLFL_EXP45 % % See also: SGofCPLcommand, VLFL_EXP46 % % % Copyright 2018 Tim C. Lueth |
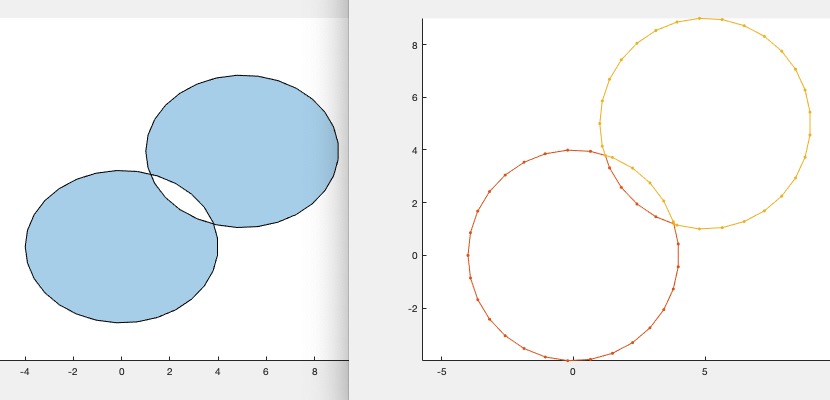
CVL2periodic(CVL,tp)- converts a perodic spatial contour into three periodic discrete fnct |
 | % CVL2periodic(CVL,tp) - converts a perodic spatial contour into three periodic discrete fnct % (by Tim Lueth, VLFL-Lib, 2018-NOV-25 as class: ANALYTICAL GEOMETRY) % % This is an auxiliary fnctn for the analysis and synthesis of % periodically repeating contours: number, length, angle. % The topic of decomposing an orbital contour into a periodic fnctn is a % problem very similar to the problem of correlating two curves. For this % reason, it makes sense to take a closer look at the fnctns % SGof2CPLzheurist, SGof2CPLs and PLcorrelate. It is possible to use the % existing grid points of a coordinate axis: % a) simply map to an angular revolution % b) Map the total length of the contour to the angular revolution. % c) map the total sum of the angles of the contour to the angular % revolution % In all three cases, additional interpolation values may have to be % found to prepare the fnctn for Fourier decomposition. Points may also % need to be removed. % Another question is the "beginning" of the curve. If this is defined % due to a maximum deflection of a value and if yes, which dimension is % dominant or due to an angle relative to the center of the curve. It is % about the discovery of the similarity of curves on the basis of initial % criteria. (Status of: 2018-12-04) % % Introduced first in SolidGeometry 4.4 % % See also: fourBarLinkage, fourBarLinkageCPL, SGof2CPLzheurist, % SGof2CPLs, PLcorrelate % % [CPLx,CPLy,CPLz,t]=CVL2periodic(CVL,[tp]) % === INPUT PARAMETERS === % CVL: CPL or PL; only the first are used % tp: time; default is 2* pi % === OUTPUT RESULTS ====== % CPLx: CPL [t x] % CPLy: CPL [t y] % CPLz: CPL [t z] % t: time vector % % EXAMPLE: % CVL2periodic(PLcircle(30)) % CVL2periodic(PLcircle(30,6)) % CVL2periodic(CPLaddauxpoints(PLcircle(30,6),1)) % CVL2periodic(CPLaddauxpoints(PLsquare(10),1)) % % See also: fourBarLinkage, fourBarLinkageCPL, SGof2CPLzheurist, % SGof2CPLs, PLcorrelate % % % Copyright 2018 Tim C. Lueth |
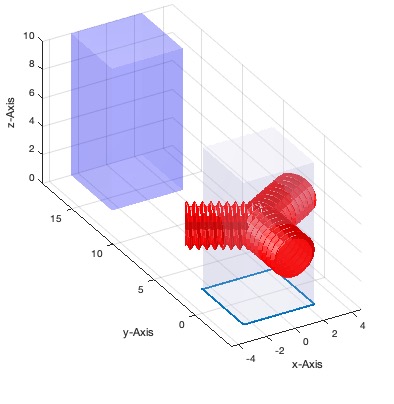
SGscrewDIN(D,L,p,CPL,shr,left)- returns a screw geometry related to DIN13 |
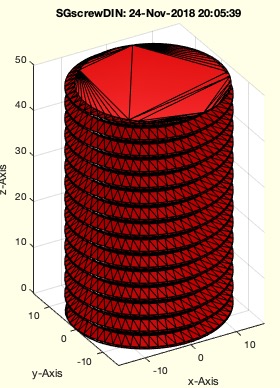 | % SGscrewDIN(D,L,p,CPL,shr,left) - returns a screw geometry related to DIN13 % (by Tim Lueth, VLFL-Lib, 2018-NOV-24 as class: PARAMETRIC DESIGN) % % ======================================================================= % OBSOLETE (2022-03-19) - USE 'SGDIN13' INSTEAD % ======================================================================= % % complete new fnctn, written for SG-Lib 4.4 and SGofCPLcommand % It is used to create wrt DIN13 watertight threads for % a) Screws (Positive Diameter, no outer CPL contour) % b) Screw tap (Negative Diameter, no outer CPL contour) % c) Nuts (Negative Diameter, outer Radius or CPL contour) % In SG 4.5 the Screw starts at z=0 (Michael Kruttschnitt) % In SG 4.7 bug using CPLs removed by comment from Simon Schiele % In SG 5.0, left-hand threads are also supported (Status of: 2020-12-22) % % Introduced first in SolidGeometry 4.4 % % See also: [ SGDIN13 ] ; SGthread, PLthreadDIN % % SG=SGscrewDIN(D,L,[p,CPL,shr,left]) % === INPUT PARAMETERS === % D: Diameter (negative creates a screw cutter or nut) % L: Length % p: optional pitch % CPL: Outer Diameter or CPL, creates nuts in combination with negative D % shr: shrinkage because of printer oversize; default is 0 % left: if true, a left % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGscrewDIN( 32,50) % Screw % SGscrewDIN(-32,50) % Screw cutter % SGscrewDIN(-32,50,'',35) % circular nut % SGscrewDIN(-32,50,'',PLcircle(40,7)); nut hexagon shape % SGscrewDIN( 32,50,'','','',true) % Screw - Left orientation % % % See also: [ SGDIN13 ] ; SGthread, PLthreadDIN % % % Copyright 2018-2022 Tim C. Lueth |
exp_2018_11_24_SGcuterror- return a SG with two open boundaries resulting from SGcut |
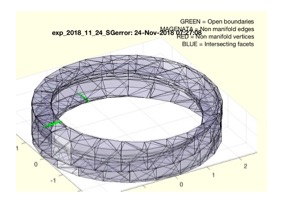 | % exp_2018_11_24_SGcuterror - return a SG with two open boundaries resulting from SGcut % (by Tim Lueth, VLFL-Lib, 2018-NOV-24 as class: EXPERIMENTS) % % This short fnctn creates an internal thread with the fnctns DIN13, % PLthreadDIN and SGofCPLrota. After generation, the SG is watertight. % Then the SG is cut with SGcut at two z- planes. % After that there are unfortunately open edges at the upper edge and % lower edge of the cut surface. This fnctn serves to generate a test % body for searching and correcting this limit case for SGCut, since % otherwise the SGcut fnctn works very reliably. % Since similar errors also occur with other threads from IGES/STEP % files, it makes sense to search for errors. (Status of: 2018-11-24) % % Introduced first in SolidGeometry 4.4 % % SG=exp_2018_11_24_SGcuterror % === OUTPUT RESULTS ====== % SG: Solid Geometry with two open edges resulting from SGcut % % EXAMPLE: exp_2018_11_24_SGerror % % % Copyright 2018 Tim C. Lueth |
PLthreadDIN(D,P)- Fnct to create the crosssection contour using DIN13 for a thread |
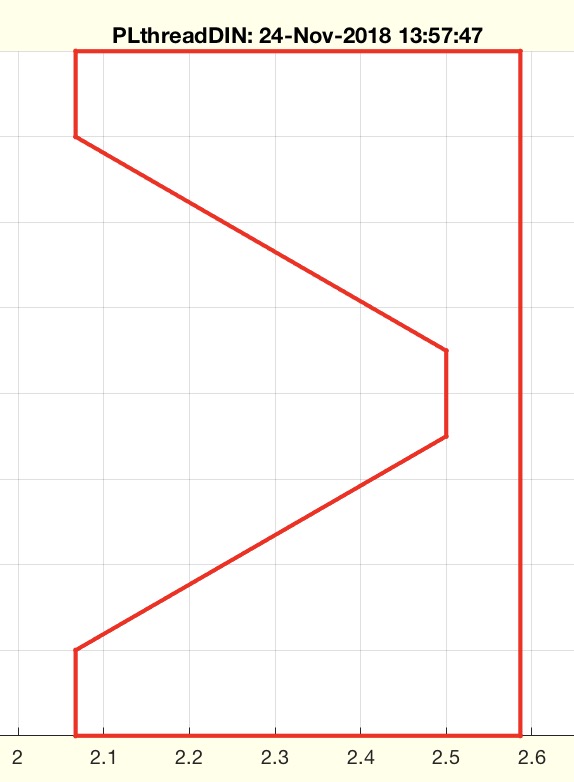 | % PLthreadDIN(D,P) - Fnct to create the crosssection contour using DIN13 for a thread % (by Tim Lueth, VLFL-Lib, 2018-NOV-23 as class: CLOSED POLYGON LISTS) % % This fnctn is an extract of first SGthread fnctn! % Attention: Every Pitch (also the one from DIN 13) will create % overlapping facets if rotated using SGofCPLrota. The reason is the % limited number polygon points of a circle or in this case a helix. This % problem is solved in SGofCPLrota by default. (Status of: 2018-11-24) % % Introduced first in SolidGeometry 4.4 % % See also: PLgearrackDIN, PLgearDIN, SGofCPLrota, SGcut % % [PLB,P,KD]=PLthreadDIN(D,[P]) % === INPUT PARAMETERS === % D: DIN diameter; negative values for nuts % P: optional pitch, otherwise taken from DIN13 % === OUTPUT RESULTS ====== % PLB: CPL for the cross section if the thread % P: Pitch of the tread % KD: Core diameter of the core of bold or nut % % EXAMPLE: % PLthreadDIN (+5) % PLthreadDIN (-5) % [PL,P]=PLthreadDIN(5); SGfigure; CPLplot(PL,'r-',2); % SG=SGofCPLrota(PL,pi*6,false,'',3*P); SGfigure; view(-30,30); SGplot(SG); % SGcut(SG,[P,3*P]); % % See also: PLgearrackDIN, PLgearDIN, SGofCPLrota, SGcut % % % Copyright 2018 Tim C. Lueth |
SGlim(VL,dim,lim,rat)- compresses the vertex coordinates outside a limit without changing the VL or FL |
 | % SGlim(VL,dim,lim,rat) - compresses the vertex coordinates outside a limit without changing the VL or FL % (by Tim Lueth, VLFL-Lib, 2018-NOV-22 as class: SURFACES) % % This is an auxiliary to "cut" the shape of a solid by simply % compressing the coordianates outside by changing the scale outside the % intervall. % typically is rat 1000 to convert millimeter in micrometer but if values % for ratio are < 1; we see a elongation. (Status of: 2018-11-23) % % Introduced first in SolidGeometry 4.4 % % See also: SGcut % % VLN=SGlim(VL,[dim,lim,rat]) % === INPUT PARAMETERS === % VL: Vertex list % dim: dimension 1 2 3 ord 'x' 'y' 'z' % lim: limit max or [min max] % rat: compression ratio default is 1000; % === OUTPUT RESULTS ====== % VLN: % % EXAMPLE: % SGgearwormDIN(1,'','',CPLmotorshaft); A=ans; view(-30,30); % SGlim(A,'y',[-18 18]) % SGlim(A,'x',[-5 5]) % SGlim(A,'y',[-18 18],.1) % % See also: SGcut % % % Copyright 2018 Tim C. Lueth |
SGfischertechnikaxle- A pluggable axle for edges and gears for Fischertechnik |
 | % SGfischertechnikaxle - A pluggable axle for edges and gears for Fischertechnik % (by Yilun Sun, VLFL-Lib, 2018-NOV-20 as class: MODELING PROCEDURES) % % Eine steckbare Achse für Ränder und Getriebe (Status of: 2018-11-20) % % Introduced first in SolidGeometry 4.4 % % See also: SGfischertechniksample % % SG=SGfischertechnikaxle % === OUTPUT RESULTS ====== % SG: SOlid Geometry % % EXAMPLE: SG1 = SGftpin; % SGdimensioning(SG1,0,0,[0 0 0]); % SGdimensioning(SG1,90,0,[1 0 0]); % % See also: SGfischertechniksample % |
PLELofCPLsplitpoints(CPL)- inserts split points into a CPL but does not change the direction of the CPL |
 | % PLELofCPLsplitpoints(CPL) - inserts split points into a CPL but does not change the direction of the CPL % (by Tim Lueth, VLFL-Lib, 2018-NOV-19 as class: CLOSED POLYGON LISTS) % % This fnctn replaces CPLsplitpoints and inserts by delaunaytriangulation % splits points into contour without changing the direction of the edge % lists. Overlapping contour still overlap. % [PL,EL,FL]=PLELofCPLsplitpoints(PLB); TR=triangulation(FL,PL); % EL=freeBoundary(TR); % would return a corrected EL but still with non manifold vertices/points % Use [a,b]=FLseparate(FL) to detect the separated surfaces and solve the % non manifold vertices problem % % (Status of: 2018-11-19) % % Introduced first in SolidGeometry 4.4 % % See also: PLELofCPL, FLseparate % % [PL,EL]=PLELofCPLsplitpoints(CPL) % === INPUT PARAMETERS === % CPL: Closed Polygon List % === OUTPUT RESULTS ====== % PL: POINT LIST % EL: Edge List % % EXAMPLE: % PLA=[PLcircle(4); nan nan; PLcircle(4)+3]; SGfigure; CVLplot(PLA); % PLB=[PLcircle(4); nan nan; flipud(PLcircle(4)+3)]; SGfigure; CVLplot(PLB); % PLELofCPLsplitpoints(PLA); % PLELofCPLsplitpoints(PLB); % % See also: PLELofCPL, FLseparate % % % Copyright 2018 Tim C. Lueth |
SGprintervalues- sets some basic printer specific parameters for automatic design fncts |
 | % SGprintervalues - sets some basic printer specific parameters for automatic design fncts % (by Tim Lueth, VLFL-Lib, 2018-NOV-19 as class: LANGUAGE PROCEDURES) % % Introduced first in SolidGeometry 4.4 % % See also: nofrd, dofn, sofrd, phiofsr % % val=SGprintervalues % === OUTPUT RESULTS ====== % val: struct % % EXAMPLE: % SGprintervalues % % % See also: nofrd, dofn, sofrd, phiofsr % % % Copyright 2018-2019 Tim C. Lueth |
SGinspect (SG,vi,fi)- zooms to inspect specific vertices or facets |
 | % SGinspect (SG,vi,fi) - zooms to inspect specific vertices or facets % (by Tim Lueth, VLFL-Lib, 2018-NOV-18 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.4 % % See also: zoompatch % % SGinspect(SG,[vi,fi]) % === INPUT PARAMETERS === % SG: Solid Geoemetry % vi: vertex indices to inspect % fi: facet indices to inspect % % See also: zoompatch % % % Copyright 2018 Tim C. Lueth |
VLFLreadOBJ(FName,mag,check)- reads in an OBJ file |
 | % VLFLreadOBJ(FName,mag,check) - reads in an OBJ file % (by Tim Lueth, VLFL-Lib, 2018-NOV-18 as class: FILE HANDLING) % % Since there are different formats in OBJ files % currently only the format % f v1 v2 v3 % and f v1/vn v2/vn v3/vn % and f v1//vn v2//vn v3//vn % are supported (Status of: 2018-11-18) % % Introduced first in SolidGeometry 4.4 % % See also: SGreadSTL, SGwriteSTL, VLFLwriteSTL, VLFLreadSTL % % [VL,FL,H,AbC,FName]=VLFLreadOBJ([FName,mag,check]) % === INPUT PARAMETERS === % FName: File Name % mag: magnification; default is 1 % check: checker; default is false % === OUTPUT RESULTS ====== % VL: Vertex list % FL: Facet list % H: Header, not used in SG-Lib 4.7 % AbC: Colors, not used in SG-Lib 4.7 % FName: Filename % % See also: SGreadSTL, SGwriteSTL, VLFLwriteSTL, VLFLreadSTL % % % Copyright 2018-2019 Tim C. Lueth |
username- returns user name and host name using JAVA |
 | % username - returns user name and host name using JAVA % (by Daniel Shub, VLFL-Lib, 2018-NOV-17 as class: AUXILIARY PROCEDURES) % % ..found in the internet.. (Status of: 2018-11-17) % % See also: expname, smbFilename, smbPSLibname % % [user,host]=username % === OUTPUT RESULTS ====== % user: user name % host: host name % % EXAMPLE: % [u,h]=username % % See also: expname, smbFilename, smbPSLibname % |
SGselect3d(SG,tx)- Interactive slection of a point, vertex, or facet in a axis |
 | % SGselect3d(SG,tx) - Interactive slection of a point, vertex, or facet in a axis % (by Tim Lueth, VLFL-Lib, 2018-NOV-16 as class: USER INTERFACE) % % Introduced first in SolidGeometry 4.4 % % See also: select3d, SGhelptext, SGselect3dPL, SGselect3Dsurface % % [p,v,vi,f,fi,haxis]=SGselect3d([SG,tx]) % === INPUT PARAMETERS === % SG: Solid geometry; if empty gca is used % tx: optional menue header % === OUTPUT RESULTS ====== % p: point % v: vertex % vi: vertex index % f: facet % fi: facet index % haxis: gca % % EXAMPLE: % SGselect3d(SGsample(25),'test') % SGselect3d(SGofSG(SG)), TofPcam(ans) % % % % See also: select3d, SGhelptext, SGselect3dPL, SGselect3Dsurface % % % Copyright 2018-2020 Tim C. Lueth |
FSofSGfacet(SG,fi,alpha)- returns the facet index list of a Feature Surface for a given facet index |
 | % FSofSGfacet(SG,fi,alpha) - returns the facet index list of a Feature Surface for a given facet index % (by Tim Lueth, VLFL-Lib, 2018-NOV-16 as class: SURFACES) % % This fnctn searches for the corresponding feature surface (FS) based on % a single facet index (fi). (Status of: 2021-09-13) % % Introduced first in SolidGeometry 4.4 % % See also: FSnormalofSG, FSofSG, FSplot, FSselect % % [FIL,fcl]=FSofSGfacet(SG,fi,[alpha]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % fi: Facet index % alpha: Alpha angle; default is .76 % === OUTPUT RESULTS ====== % FIL: Facet index list for one feature surface % fcl: facet connectionlist % % EXAMPLE: % FSofSGfacet(SGsample(25),210) % FSofSGfacet(SGsample(25)) % % See also: FSnormalofSG, FSofSG, FSplot, FSselect % % % Copyright 2018-2021 Tim C. Lueth |
SGcutTa(SG,To,a,delta,bs)- inserts a revolute joint in the center of a solid |
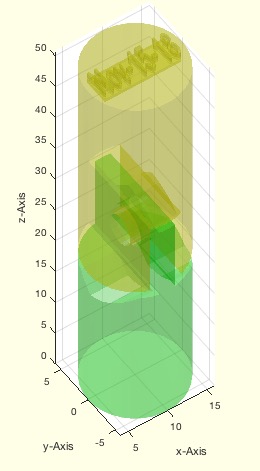 | % SGcutTa(SG,To,a,delta,bs) - inserts a revolute joint in the center of a solid % (by Tim Lueth, VLFL-Lib, 2018-NOV-15 as class: MODELING PROCEDURES) % % Introduced first in SolidGeometry 4.4 % % See also: SGcutTfischertechnik % % [C,A,B,Tc]=SGcutTa([SG,To,a,delta,bs]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % To: Position of the Joint % a: alpha (amin, amax) % delta: slot size % bs: length and height of joint % === OUTPUT RESULTS ====== % C: Joint Solid % A: Solid with hole (green) % B: Solid with pin (Yellow) % Tc: Center transformation matrix % % EXAMPLE: % SGcutTA(SGtransP(SGcylinder(6,50),[10 0 0]),TofR(rot(0,pi/2,0))) % % See also: SGcutTfischertechnik % % % Copyright 2018-2020 Tim C. Lueth |
SGcylinder(r,h,n,ri,ry,al)- returns a simple cylinder |
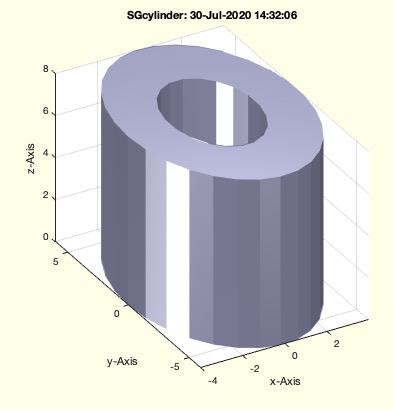 | % SGcylinder(r,h,n,ri,ry,al) - returns a simple cylinder % (by Tim Lueth, VLFL-Lib, 2018-NOV-15 as class: SURFACES) % % Introduced first in SolidGeometry 4.4 % % See also: SGbox, SGcone, SGsphere, SGarrow, SGspherelink, % SGpinwrenchsize, SGspherelink, SGrodlink % % SG=SGcylinder([r,h,n,ri,ry,al]) % === INPUT PARAMETERS === % r: Radius % h: Height % n: number of points % ri: Inner Radius % ry: Radius in y % al: Angle of circle; default is 2*pi % === OUTPUT RESULTS ====== % SG: Solid Geometry % % EXAMPLE: % SGcylinder(5,30) % SGcylinder(5,30,6) % SGcylinder(5,30,6,2) % SGcylinder(5,30,6,2,10) % SGcylinder(5,30,'',2,10,2*pi/1.5) % Elliptic with inner bore % % See also: SGbox, SGcone, SGsphere, SGarrow, SGspherelink, % SGpinwrenchsize, SGspherelink, SGrodlink % % % Copyright 2018-2021 Tim C. Lueth |
CVLzofSGsliceauto(SG,dz)- returns the slices with a significant z distance |
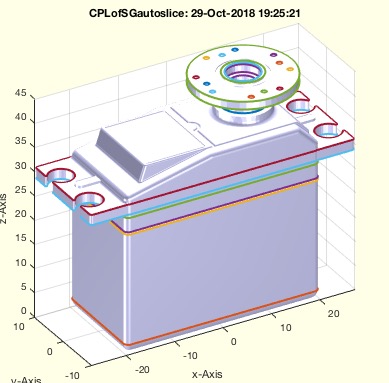 | % CVLzofSGsliceauto(SG,dz) - returns the slices with a significant z distance % (by Tim Lueth, VLFL-Lib, 2018-NOV-13 as class: SLICES) % % same fnctn as CPLofSGsliceauto (Status of: 2018-12-15) % % Introduced first in SolidGeometry 4.4 % % See also: CPLofSGslice, CPLofSGslice2, CPLofSGslice3, CPLofSGsliceauto % % CVL=CVLzofSGsliceauto(SG,[dz]) % === INPUT PARAMETERS === % SG: Solid Geometry % dz: minimal z change; default is soBB(SG)/50 % === OUTPUT RESULTS ====== % CVL: Closed Vertex List of all z values % % EXAMPLE: % SGreadSTL; A=ans; SGrotateservo(A); B=ans % CVLzofSGsliceauto(B); % % % See also: CPLofSGslice, CPLofSGslice2, CPLofSGslice3, CPLofSGsliceauto % % % Copyright 2018-2020 Tim C. Lueth |
CPLremstraightAmin(CPL,Amin)- removes points with a minal distance/area to a predecessor or successor |
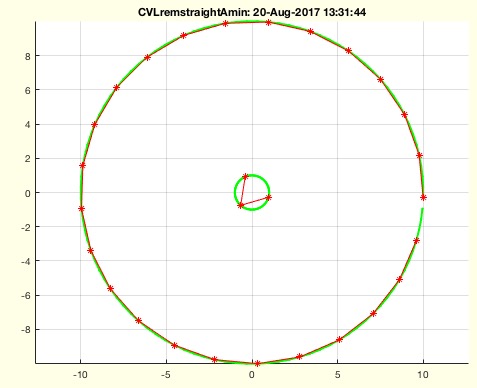 | % CPLremstraightAmin(CPL,Amin) - removes points with a minal distance/area to a predecessor or successor % (by Tim Lueth, EXPERIMENT, 2018-NOV-13 as class: CLOSED POLYGON LISTS) % % Same as CVLremstraightAmin % This fnctn seperates individual CPLs by nan and processes them using % VLremstraightAmin The result is always an open end CPL! Ohter fnctn % such as CVLinsertT or CPLaddauxpoints insert additional points into a % contour (Status of: 2019-03-04) % % Introduced first in SolidGeometry 4.4 % % See also: CVLremstraightAmin, CVLremstraight, CVLinsertT % % NPL=CPLremstraightAmin(CPL,[Amin]) % === INPUT PARAMETERS === % CPL: Closed Polygon Line in 2D or 3D % Amin: Minimal Area between two succeeding points; default is 1e-3; % === OUTPUT RESULTS ====== % NPL: New Vertex List % % EXAMPLE: % CPLremstraightAmin(VLaddz([PLcircle(10,100); nan nan;PLcircle(1,100)]),1) % CPLremstraightAmin([PLcircle(10,100); nan nan;PLcircle(1,100)],1) % % See also: CVLremstraightAmin, CVLremstraight, CVLinsertT % % % Copyright 2018-2019 Tim C. Lueth |
CVLzsweep(CVL,)- returns a swept CVL z Contour and a 2.5d solid |
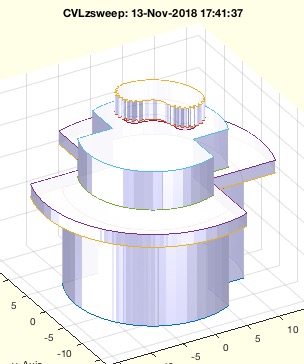 | % CVLzsweep(CVL,) - returns a swept CVL z Contour and a 2.5d solid % (by Tim Lueth, VLFL-Lib, 2018-NOV-13 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.4 % % See also: CVLsweepslices % % CVLn=CVLzsweep(CVL,[]) % === INPUT PARAMETERS === % CVL: CVL sliced Contour % === OUTPUT RESULTS ====== % CVLn: Swept CVLz % % EXAMPLE: % A=SGcmdsample('3156'); CVLzofSGsliceauto(A); CVL=ans; % CVLzsweep(CVL,pi/2) % % See also: CVLsweepslices % % % Copyright 2018-2020 Tim C. Lueth |
CPLofSGhull2018(SG)- returns the outer contour of a solid |
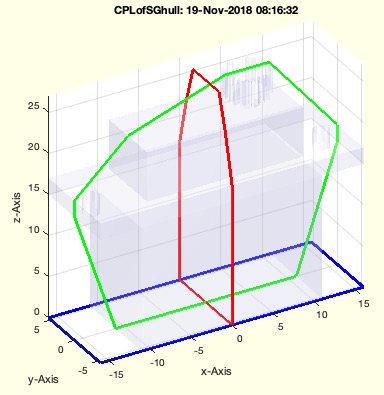 | % CPLofSGhull2018(SG) - returns the outer contour of a solid % (by Tim Lueth, VLFL-Lib, 2018-NOV-12 as class: CLOSED POLYGON LISTS) % % ======================================================================= % OBSOLETE (2019-07-01) - USE 'CPLofSGhull' INSTEAD % ======================================================================= % % Introduced first in SolidGeometry 4.4 % % See also: [ CPLofSGhull ] ; CPLofSGslicer, CPLofSGhull % % [XY,XZ,YZ]=CPLofSGhull2018(SG) % === INPUT PARAMETERS === % SG: Solid Geoemetry % === OUTPUT RESULTS ====== % XY: Contour blue % XZ: Contour green % YZ: Contour red % % EXAMPLE: % A=SGcmdsample('3156'); CPLofSGhull(A) % % See also: [ CPLofSGhull ] ; CPLofSGslicer, CPLofSGhull % % % Copyright 2018-2019 Tim C. Lueth |
CPLrepair(OCPL)- returns a corrected polyshape contour |
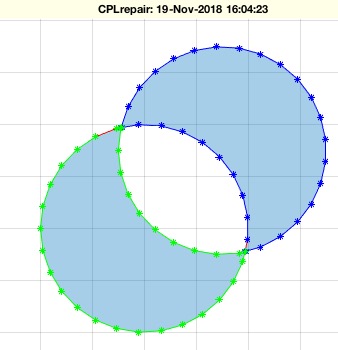 | % CPLrepair(OCPL) - returns a corrected polyshape contour % (by Tim Lueth, VLFL-Lib, 2018-NOV-12 as class: CLOSED POLYGON LISTS) % % This fnctn is nothing else polyshape but explains the principle of % polyshape. % PLA=[PLcircle(4); nan nan; PLcircle(4)+3]; % ps=polyshape(PLA,'Simplify',false); CPL=ps.Vertices; SGfigure; % CVLplot(CPL); % ps=polyshape(PLA,'Simplify',true); CPL=ps.Vertices; SGfigure; % CVLplot(CPL); % % (Status of: 2018-11-19) % % Introduced first in SolidGeometry 4.4 % % See also: CPLsplitpoints, CPLrecontour, CPLmeltbool % % [CPL,NP]=CPLrepair(OCPL) % === INPUT PARAMETERS === % OCPL: Original Contour line % === OUTPUT RESULTS ====== % CPL: Closed % NP: % % EXAMPLE: % PLA=[PLcircle(4); nan nan; PLcircle(4)+3]; % CPLrepair(PLA); CVLplot(ans); view(0,90); % % See also: CPLsplitpoints, CPLrecontour, CPLmeltbool % % % Copyright 2018-2019 Tim C. Lueth |
CPLoftesthinge(rmin,delta,sx,sy,txt,h)- returns a shape and a Geometry for a flexible hinge with 180 degree radius |
 | % CPLoftesthinge(rmin,delta,sx,sy,txt,h) - returns a shape and a Geometry for a flexible hinge with 180 degree radius % (by Tim Lueth, VLFL-Lib, 2018-NOV-12) % % For designing test hinges with different Materials, this fnctn creates % a coontour and a solid to test those. % For brittle materials with a low mating limit: % Select the radius as small as possible so that the stress path is as % small as possible. % 2. define the stiffness with the value delta, the thinner the more % flexible % 3 Do not design continuous hinge surfaces, otherwise further critical % torsion stresses will be added, but parallelise in a yarnlike manner. % (Status of: 2019-02-10) % % Introduced first in SolidGeometry 4.4 % % [CPL,SG]=CPLoftesthinge([rmin,delta,sx,sy,txt,h]) % === INPUT PARAMETERS === % rmin: minimal radius; default is 0.5 % delta: Thickness of circle % sx: size in x ; default is 10 mm % sy: size in y ; default is 5 mm % txt: text; default is rminand delta % h: height of the solid; default is 1 % === OUTPUT RESULTS ====== % CPL: Closed Polygon line % SG: Solid Geoemtry % % EXAMPLE: % [a,b]=CPLoftesthinge(0.5,3.0,'','',' '); SGfigure; SGplot(b); % % % Copyright 2018-2019 Tim C. Lueth |
CPLBezier(CPL,ns);- returns Bezier Curves from CPLs |
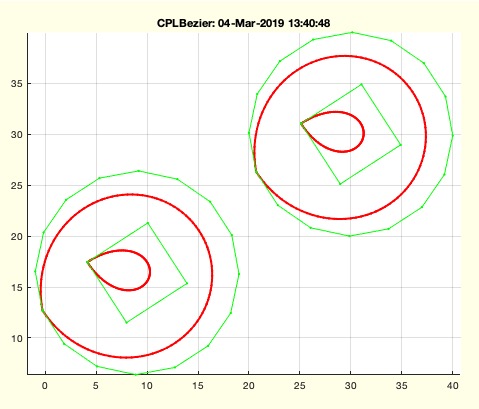 | % CPLBezier(CPL,ns); - returns Bezier Curves from CPLs % (by Tim Lueth, VLFL-Lib, 2018-NOV-09 as class: CLOSED POLYGON LISTS) % % Introduced first in SolidGeometry 4.4 % % See also: VLBezierC, CPLfft, CPLBezier % % % CPLB=CPLBezier(CPL,[ns]); % === INPUT PARAMETERS === % CPL: CPL % ns: number of Beziercoefficients % === OUTPUT RESULTS ====== % CPLB: Contours of CPL as Bezier Curves % % EXAMPLE: % CPLBezier(CPLsample(12),5); % CPLBezier(PLtransT(CPLsample(12),TofR(rot(10),[30 30])),5); % CPLBezier(PLtransT(CPLsample(12),TofR(rot(10),[30 30])),100); % % See also: VLBezierC, CPLfft, CPLBezier % % % % Copyright 2018-2019 Tim C. Lueth |
RPofTrelT(TA,TB)- returns the frame T2 in relation to frame T1 |
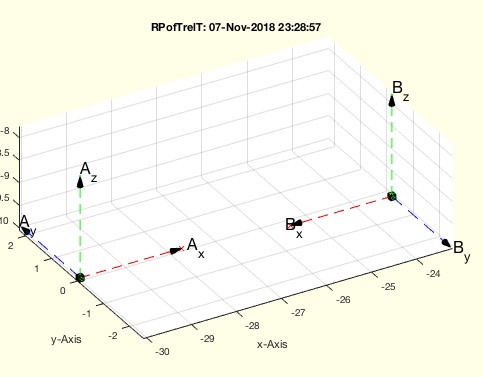 | % RPofTrelT(TA,TB) - returns the frame T2 in relation to frame T1 % (by Tim Lueth, VLFL-Lib, 2018-NOV-07 as class: ANALYTICAL GEOMETRY) % % simple fnctn T=inv(T1)*T2 or T1\T2; % afterwards rotm2eul(T(1:3,1:3),'XYZ'); (Status of: 2018-11-07) % % Introduced first in SolidGeometry 4.4 % % See also: TofR % % [R,P,A_T_B]=RPofTrelT(TA,TB) % === INPUT PARAMETERS === % TA: Frame A % TB: Frame B % === OUTPUT RESULTS ====== % R: Rotation angles (euler) XYZ % P: Distance % A_T_B: Frame B relative to Frame A % % EXAMPLE: % rotm2axang(rot(a)) % SG=SGbending(SGofCPLzdelaunayGrid(PL,4,2,2,2),40); % % See also: TofR % % % Copyright 2018 Tim C. Lueth |
SGcutTcrossblade(SG,T,d,ct)- removes a part out of a solid |
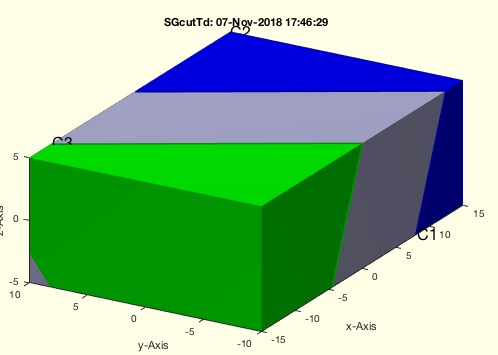 | % SGcutTcrossblade(SG,T,d,ct) - removes a part out of a solid % (by Tim Lueth, VLFL-Lib, 2018-NOV-07 as class: SURFACES) % % Cuts out a block using a Transformation matrix and a slot size. In case % of an interactive specification of the T matrix (TofPcam) it is % possible to specify 'a'xial, 'c'oronal or 's'agittal as orientation. % (Status of: 2022-01-20) % % Introduced first in SolidGeometry 4.4 % % See also: SGcutT, BBofSGcutT, SGcut, SGcut2, SGcutBB, SGcutTCPL, % SGcutTcylindricblade, SGseparatebyT % % [A,B,Tc]=SGcutTcrossblade([SG,T,d,ct]) % === INPUT PARAMETERS === % SG: Solid Geoemtry % T: cutting frame % d: slot in size % ct: orientation 'default' is '-a',; 'c', 's', 'a' % === OUTPUT RESULTS ====== % A: Cutted Solid (green) % B: Blade solid (red) % Tc: Used cutting Frame % % EXAMPLE: % loadweb ADAM_A.mat; SGsurfaces(ADAM_A); A=ans; % Separate STL into limbs % SGcutTcrossblade(A{1}) % % % See also: SGcutT, BBofSGcutT, SGcut, SGcut2, SGcutBB, SGcutTCPL, % SGcutTcylindricblade, SGseparatebyT % % % Copyright 2018-2022 Tim C. Lueth |
randminv(r,c,rmin)- returns a random fnct that has a minimal value |
 | % randminv(r,c,rmin) - returns a random fnct that has a minimal value % (by Tim Lueth, VLFL-Lib, 2018-NOV-07 as class: AUXILIARY PROCEDURES) % % Introduced first in SolidGeometry 4.4 % % See also: randsupp, randol % % r=randminv(r,c,[rmin]) % === INPUT PARAMETERS === % r: rows % c: cols % rmin: minimal value or [rmin rmax]; default is [rmin 1] % === OUTPUT RESULTS ====== % r: random matrix % % See also: randsupp, randol % % % Copyright 2018-2020 Tim C. Lueth |
